







Le concept principal de ce projet est qu'à l'aide de diverses ondes cérébrales, l'utilisateur pourra contrôler le robot, le curseur sur son PC ou allumer / éteindre les lumières de sa maison, tandis que le microcontrôleur (Particle Photon) crée une analyse en ligne des ondes cérébrales de l'utilisateur. Alors oui, avec cet appareil, vous pouvez vraiment utiliser le pouvoir de la pensée
 ... Cet appareil n'est pas seulement destiné aux paresseux ou aux fans, il a été créé afin de donner aux gens l'opportunité. qui luttent chaque jour avec leur handicap. Le robotdéveloppé par l'auteur fonctionne comme un système de fauteuil roulant la maison l'automatisation aidera l'utilisateur à contrôler la lumière ou le téléviseur, même s'il ne peut pas bouger. Le mode contrôleur PC peut être utile même à ceux qui sont en parfaite santé.
... Cet appareil n'est pas seulement destiné aux paresseux ou aux fans, il a été créé afin de donner aux gens l'opportunité. qui luttent chaque jour avec leur handicap. Le robotdéveloppé par l'auteur fonctionne comme un système de fauteuil roulant la maison l'automatisation aidera l'utilisateur à contrôler la lumière ou le téléviseur, même s'il ne peut pas bouger. Le mode contrôleur PC peut être utile même à ceux qui sont en parfaite santé. Comment ça marche?
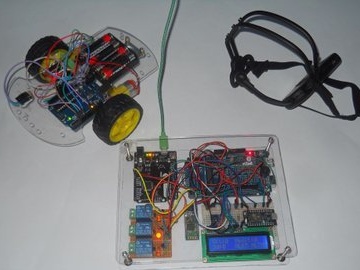

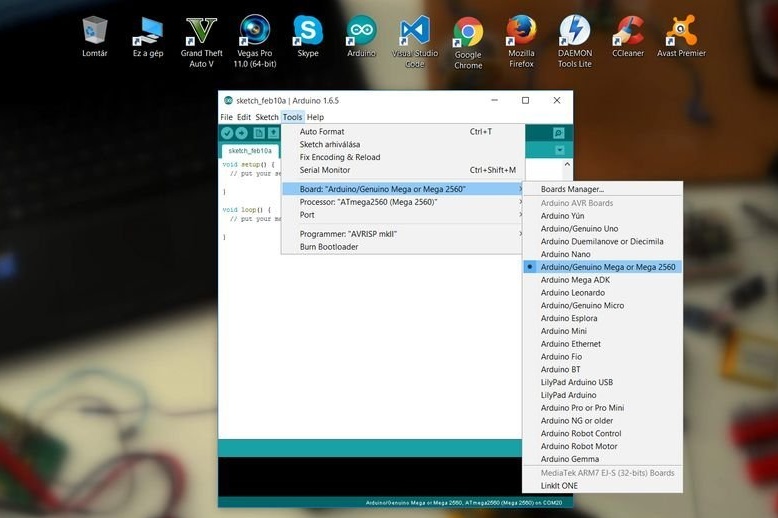
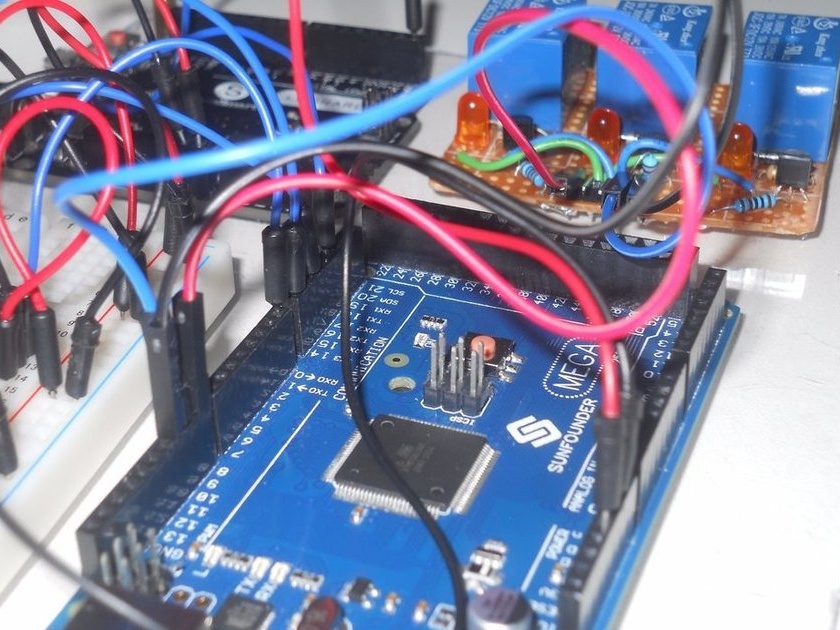
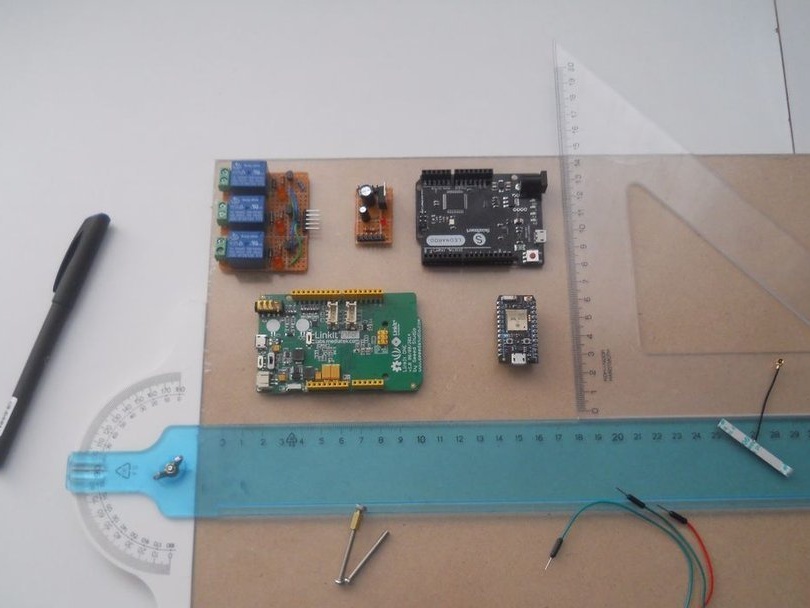
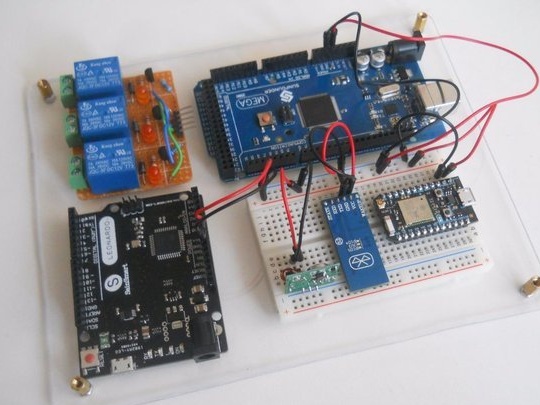
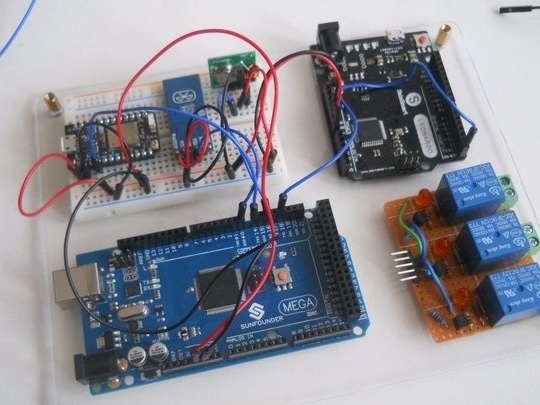
Quatre microcontrôleurs ont été utilisés pour donner vie à ce projet: Arduino Mega, Arduino Leonardo, UNO et Particle Photon. Mega est le cerveau du projet, qui reçoit les signaux du casque, analyse et envoie des commandes à d'autres appareils. Transmet toutes les données à Particle Photon, qui crée un serveur Web. Leonardo contrôle la souris sur un PC et Uno est utilisé pour recevoir des IR (signaux infrarouges) et contrôler le robot. Un appareil est capable de contrôler trois appareils différents (ou plus si vous souhaitez programmer autre chose). De plus, ces trois appareils différents seront appelés canaux. L'appareil bascule entre ces canaux si vous fermez les yeux:
Fermez les yeux pendant 1-2 secondes: passez à la fonction domotique
Fermez les yeux pendant 2 à 4 secondes: passez en mode contrôleur de robot
Fermez les yeux pendant 1 à 6 secondes: passe en mode contrôleur de souris
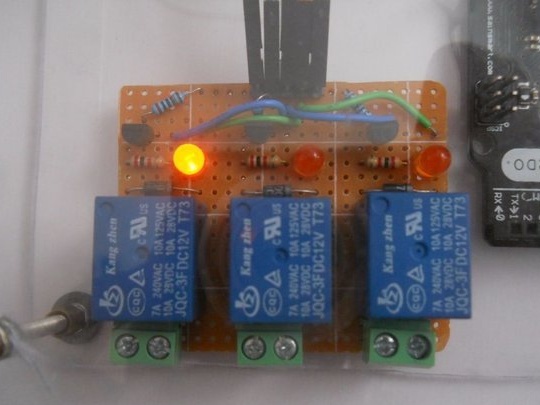
Pour faire la fonction de la domotique, à laquelle vous pouvez connecter n'importe quoi: un téléviseur, des ampoules, des prises, tout ce que vous voulez, des relais ont été utilisés
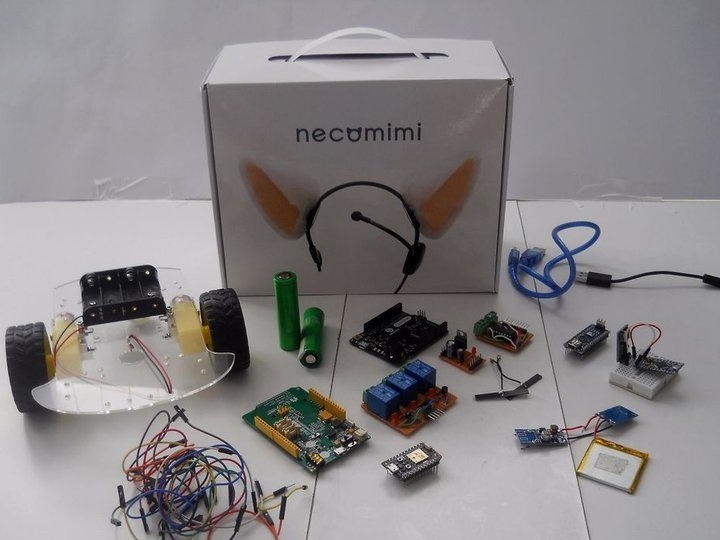
Pour la perception des ondes cérébrales - Necomimi, qui peut bouger vos oreilles en fonction de vos ondes cérébrales (attention, méditation). À l'intérieur d'une petite puce qui lit les ondes cérébrales, filtre le bruit et donne un très bon signal. Il fonctionne avec l'interface UART (série), donc avec un certain piratage, nous pouvons utiliser Arduino pour lire les ondes cérébrales.Le rôle de ce casque est de transmettre sans fil des ondes cérébrales à un serveur central.
Si vous connaissez déjà projet précédentvous pouvez alors ignorer la phase de démontage et de remodelage de Necomimi.
Descendez pour voir comment le démonter et en faire un casque sans fil Bluetooth.
Système de contrôle domotique
Si vous passez en mode domotique, augmentez votre niveau d'attention au-dessus de 70 pour activer le premier relais, augmentez votre niveau de méditation au-dessus de 70 pour activer votre deuxième relais et augmentez les deux valeurs au-dessus de 70 pour activer votre troisième relais. C'est un peu difficile, mais pas impossible après un certain entraînement de l'esprit. Si le relais est déjà activé, utilisez la même commande pour le désactiver (s'il est activé, atteignez 70 pour le désactiver). Lorsque le système est prêt, tout appareil haute tension (lumière, télévision, ordinateur, ventilateur, etc.) peut être connecté au module relais.
Contrôle de la souris
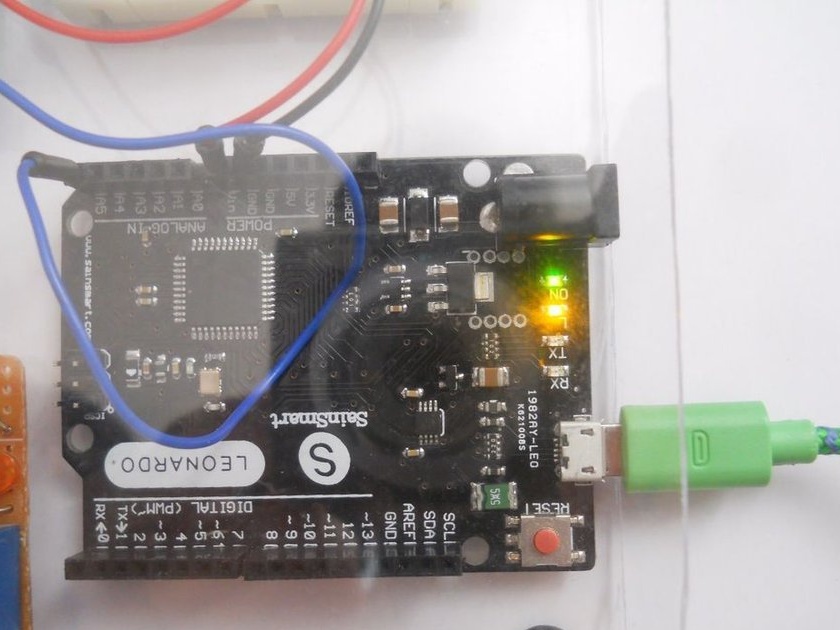
Le curseur est contrôlé par les émotions. Si le niveau d'attention est inférieur à 25, il se déplace vers la gauche, si entre 25 et 50 il se déplace vers la droite, si entre 50 et 75 il monte, et si entre 75 et 100 il baisse. Vous pouvez émettre un clic sur le bouton de la souris en augmentant le niveau de méditation. Bien sûr, vous devez vous entraîner pour cela.
Contrôle du robot
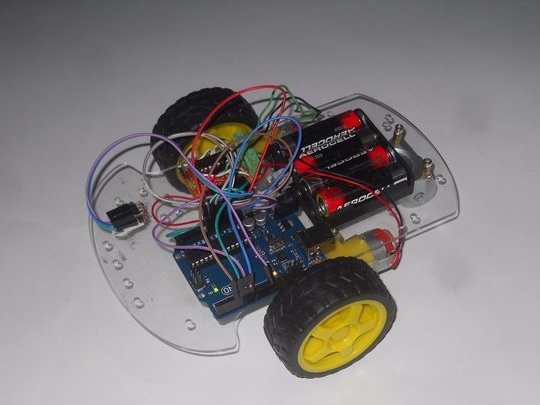
Le robot n'a que trois équipes différentes: arrêter, tourner à gauche et avancer. Pourquoi seulement deux options de mouvement? Parce que ces deux directions suffisent à déplacer le robot n'importe où. Utilisez votre niveau de méditation pour tourner avec le robot, et lorsque vous avez atteint la direction que vous souhaitez déplacer, arrêtez le robot, puis avancez avec le niveau d'attention. C'est le meilleur moyen de contrôler le robot, et même les débutants qui ne maîtrisent pas aussi bien leurs valeurs d'attention / méditation peuvent jouer avec ce robot.
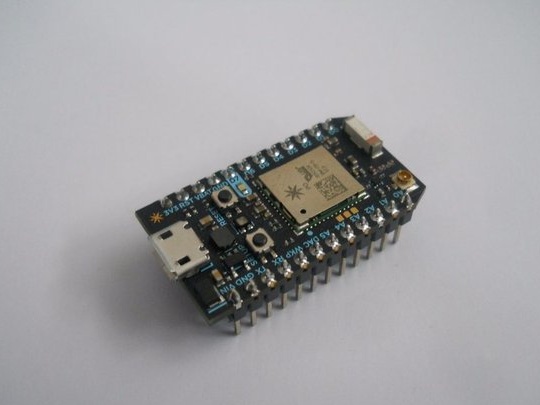
Le casque transmet des signaux BT (Bluetooth) à l'Arduino Mega, qui analyse les octets entrants et, selon les pensées de l'utilisateur, contrôle diverses fonctions. Au début, l'auteur voulait utiliser Particle Photon comme transmetteur de données, mais ce petit module a joué un rôle dans la création d'un serveur Web. C'était la plus grande modification de tout le projet. Il a également utilisé des modules Arduino faits maison, mais vous pouvez acheter ces modules en ligne.
Toutes les pièces proviennent de GearBest.com. Il s'agit d'une boutique en ligne, comme eBay, mais les pièces de rechange sont livrées beaucoup plus rapidement (peut-être que tout cela est sur aliexpress). Par conséquent, si vous souhaitez créer votre propre contrôleur de jeu, contrôleur de robot ou Force Detecto r, commencez par acheter des pièces.






Outils nécessaires:
fer à souder
souder
pistolet à colle
ruban auto-adhésif / ruban double face
pince à dénuder
coupe-fil
Équipement
/ Arduino Nano
Logiciel:
Piratage de Necomimi







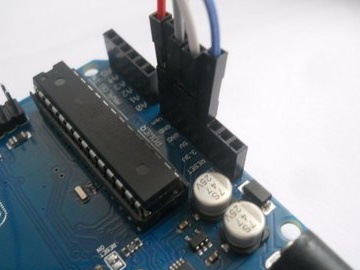
Nous voulons modifier ce jouet EEG pour le transfert de données via Bluetooth, nous allons donc d'abord démonter le boîtier. Les vis sont sous l'autocollant. Retirez l'autocollant et l'arrière de l'appareil et vous trouverez de petites planches à l'intérieur. Celui sous la carte principale est la puce Neurosky TGAM. 4 fils de la carte principale du microcontrôleur y sont soudés, alors prenez un fer à souder et retirez soigneusement ce circuit. Soudez maintenant les trois fils à la broche GND, à la broche VCC et à la broche T. Une broche en T est une sortie d'émetteur avec une vitesse de 57600 bauds, qui envoie des paquets de données à notre microcontrôleur. Une fois que vous avez soudé les trois fils ci-dessus, vous pouvez intégrer votre propre source d'alimentation rechargeable. L'auteur utilise une batterie lithium-ion de 500 mAh, un circuit de chargeur USB, un circuit de suralimentation de 5 V et deux résistances (100 Ohms et 200 Ohms) pour fournir une alimentation séparée de 3,4 V pour la puce et le module Bluetooth. Sur la photo, le schéma de connexion.
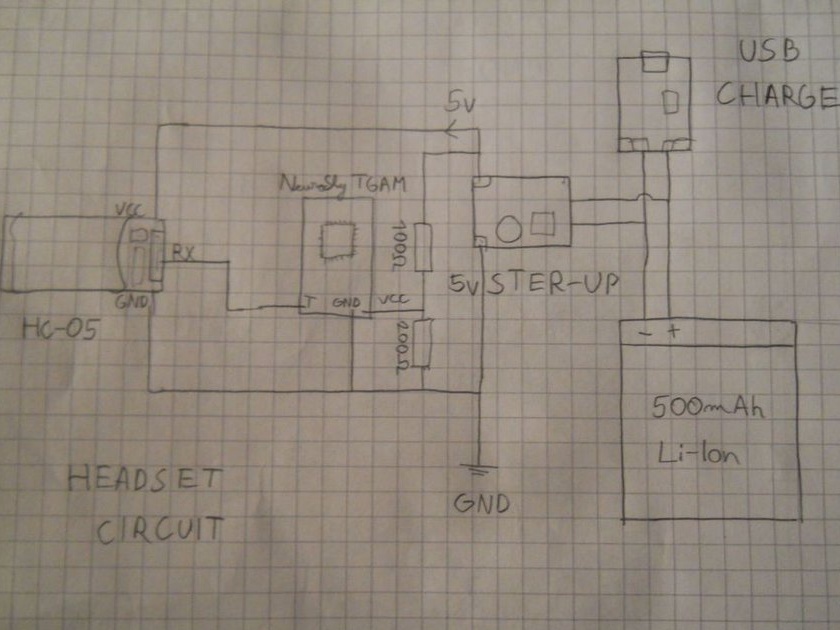
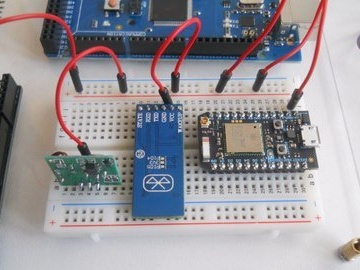
Si le circuit est prêt, configurez le module Bluetooth.
Suivez les instructions et les figures ci-dessous et créez votre propre casque EEG sans fil.
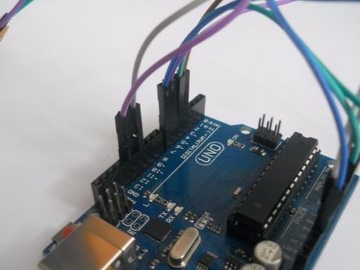
La partie la plus importante est de connecter la broche «T» au «RX» sur le module Bluetooth.



HC-06: Téléchargez d'abord l'esquisse nommée «HC_06_Bluetooth» sur Arduino UNO, puis connectez le module Bluetooth comme indiqué sur le schéma.
// HC-06-Bluetooth
void setup () {
// Démarrez la série matérielle.
Serial.begin (9600); // débit en bauds HC-06 par défaut
retard (1000);
Serial.print ("AT");
retard (1000);
Serial.print ("AT + VERSION");
retard (1000);
Serial.print ("AT + PIN"); // pour supprimer le mot de passe
retard (1000);
Serial.print ("AT + BAUD7"); // Réglez le débit en bauds sur 576000 - par exemple Necomimi dafault
retard (1000);
Serial.begin (57600); //
retard (1000);
}
boucle vide () {
}Ouvrez le moniteur série dans l'IDE Arduino et attendez que l'Arduino configure le module BT. Votre module Bluetooth est désormais réglé sur 57600 bauds. Vous pouvez essayer de nombreuses applications BCI (Brain Computer Interface) car ce jouet Necomimi piraté sera compatible avec toutes les applications Neurosky.
Vous pouvez utiliser ces applications pour apprendre à contrôler vos ondes cérébrales.
HC-05: Utilisez ensuite «HC_05_Bluetooth» et chargez votre Arduino de la même manière qu'auparavant.
// HC-06-Bluetooth
annuler la configuration () {
// Démarrez la série matérielle.
Serial.begin (9600); // débit en bauds HC-05 par défaut
retard (1000);
Serial.print ("AT");
retard (1000);
Serial.print ("AT + VERSION");
retard (1000);
Serial.println ("AT + ROLE = 1"); // mettre le HC-05 en mode maître
retard (1000);
Serial.println ("AT + LINK =" Insérez votre adresse ici "); // maintenant le module devrait se connecter automatiquement
retard (1000);
Serial.print ("AT + UART = 57600,1,0"); // Réglez la vitesse de transmission sur 576000
Serial.begin (57600); //
retard (1000);
}
boucle vide () {}
Connectez la broche "EN" du HC-05 à l'Arduino 3v3. Vous devez écrire l'adresse de votre module HC-06 dans le code. Vérifiez l'adresse du module BT sur votre smartphone Android. Remplacez ":" (points doubles) par des virgules "," dans le code.
Et vous devez changer l'adresse dans le code: 20: 15: 09: 15: 17: 82 = 2015.09.151782 Ainsi, le module HC-05 peut reconnaître l'adresse.
Télécommande
Pour créer ce robot peu coûteux, un capteur infrarouge de 38 kHz a été utilisé, qui est utilisé dans les télécommandes de télévision.
Conducteur de moteur
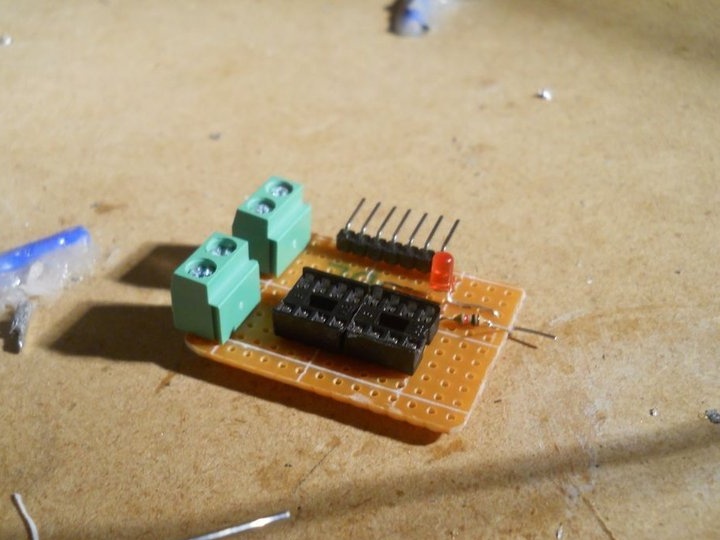
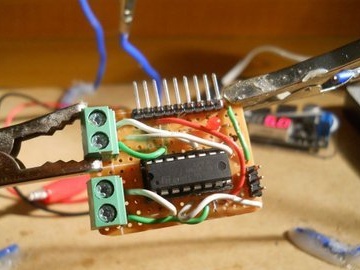
Diagramme d'entraînement du moteur - Vous aurez besoin des détails suivants:
2 bornes à vis
L293D IC3
Broche d'en-tête (90 degrés)
Résistance 1k
LED rouge
Fils
Circuit imprimé
À l'aide de plusieurs fils de cuivre et, conformément au schéma, connectez les broches du microcircuit aux broches du connecteur. Peu importe quelle jambe du microcircuit à quelle broche du connecteur, rappelez-vous simplement où vous les avez connectés. La LED est connectée en série avec la résistance et en parallèle avec 5 V VCC.
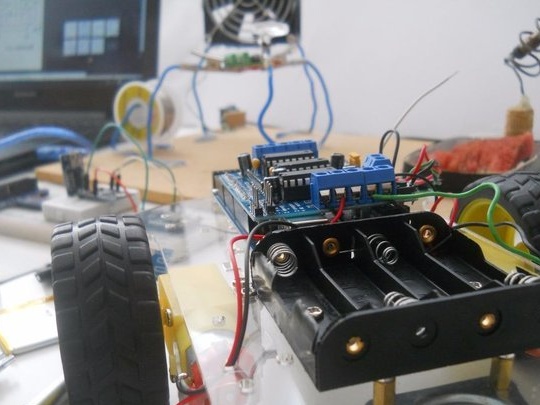
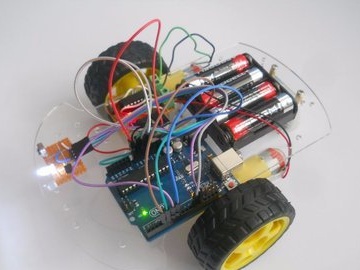
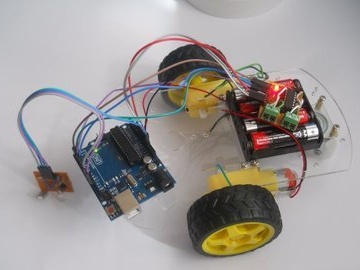
assemblage de châssis
En tant que pilote de moteur électrique, la puce L293D est utilisée, qui peut contrôler deux moteurs. Regardez le diagramme pour construire le diagramme.
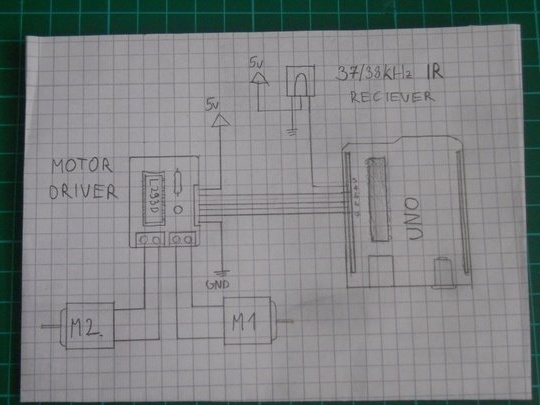
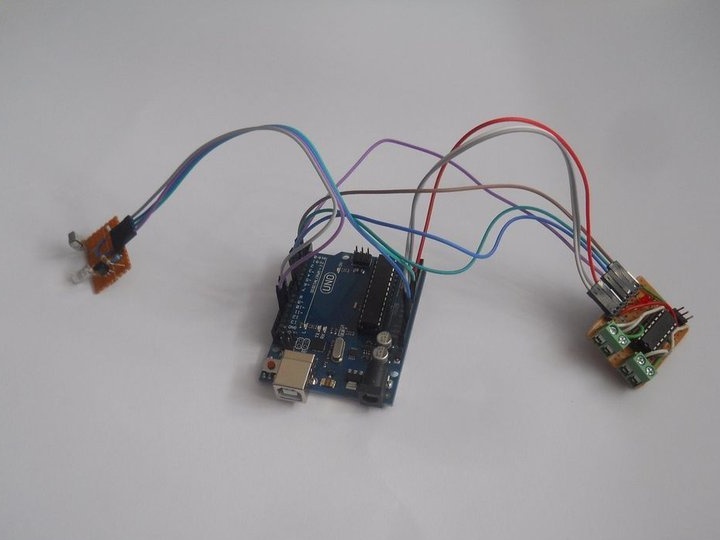
Connecter des pièces à Arduino
Broche Arduino == & gt; pilote de moteur
4 == & gt; 15
5 == & gt; 10
6 == & gt; 7
7 == & gt; 2
VIN == & gt; 85v == & gt; 1, 9, 16
GND == & gt; 4, 5, 13, 12
Alors, regardez le schéma du circuit du module L293D, puis connectez ses contacts à l'Arduino UNO, comme décrit ci-dessus. La broche 5v Arduino doit être connectée aux broches 1, 9, 16 pour activer la fonction de contrôle du moteur de la puce. Enfin, utilisez les bornes à vis pour allumer les moteurs.
La bibliothèque utilise IRremote, un code qui lit les signaux infrarouges à 38 kHz, les décode, puis déplace le robot. (Téléchargez la bibliothèque dans la section "logiciel").
Il y a des commentaires dans le code, mais l'essentiel est qu'il décode les signaux IR provenant du serveur principal, puis, selon ce que l'utilisateur veut, il allume les moteurs, après quoi le robot avance ou tourne à gauche. Téléchargez le code: "Robot_Code". Téléchargez-le sur votre Arduino et votre robot sera prêt.
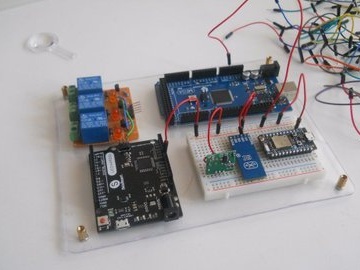
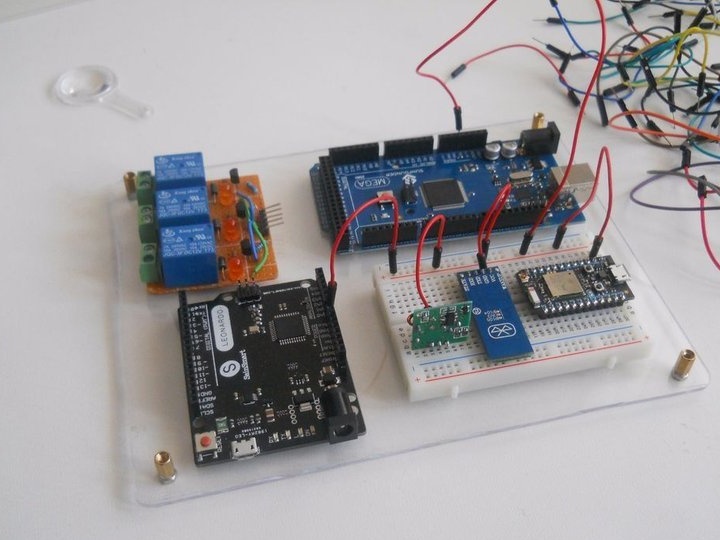
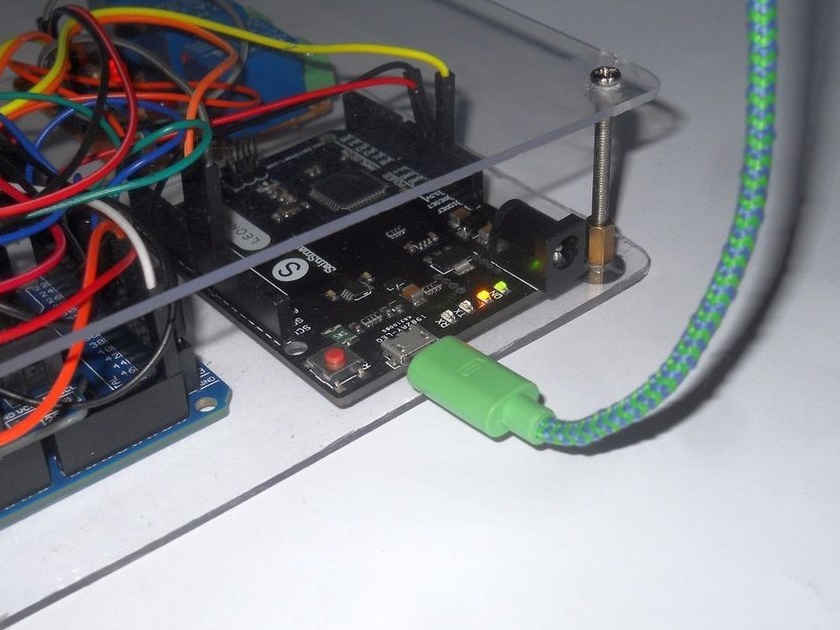
Serveur principal (Arduino Mega, Leonardo, Photon)




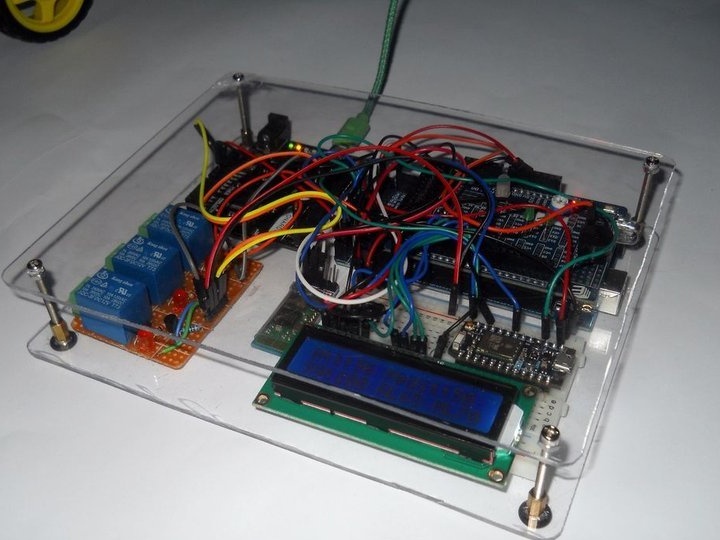
Le serveur lit les paquets de données entrants depuis le casque sans fil. Nous utiliserons le module BT configuré pour assurer la communication entre le casque et le serveur. Arduino Mega est le cerveau de tout le circuit, tout est connecté à ce microcontrôleur: Bluetooth, émetteur infrarouge LED, serveur web et contrôleur de souris. Le code est un peu compliqué, mais en règle générale, il a des commentaires à comprendre.
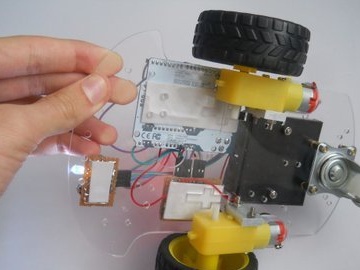
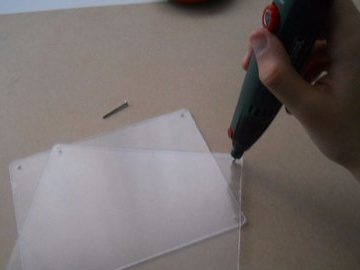
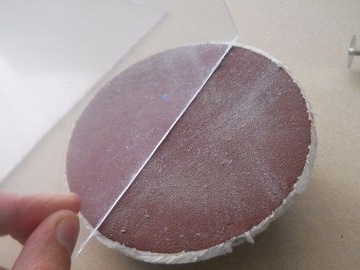
Logement
Tout est simple. Deux plaques en plexiglas 18x15 cm, lissez les bords avec du papier de verre. Plusieurs vis pour les relier entre elles.
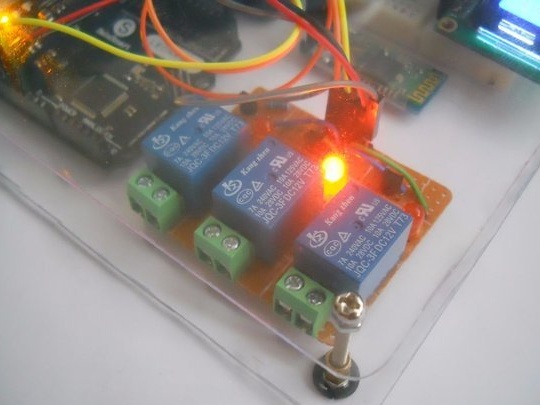
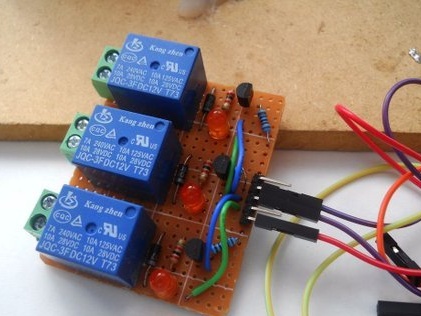
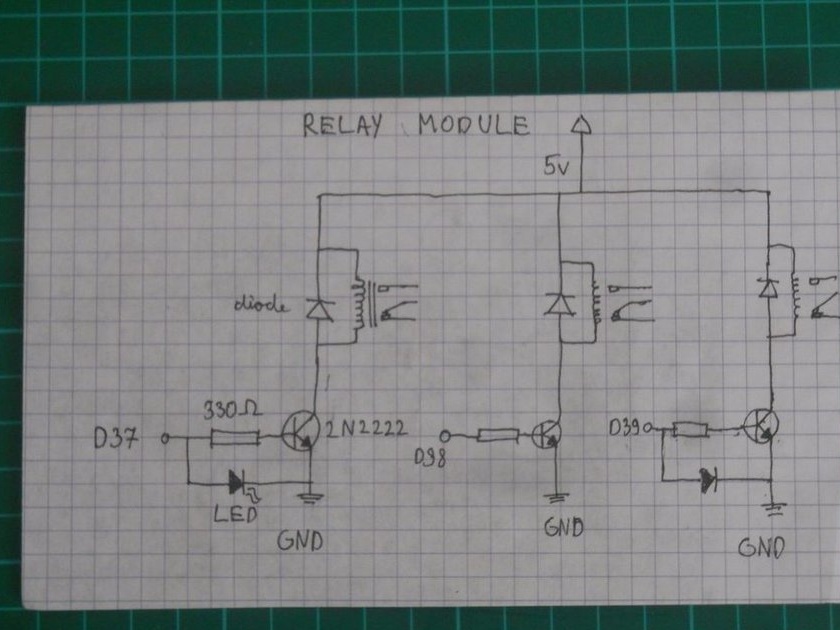
Carte relais
Vous aurez besoin des informations suivantes:
Transistor 2N2222 (3 pièces)
diodes au germanium (3 pièces)
Résistances 330 ohms (3 pièces)
Résistances 1 kOhm (3 pièces)
Relais 5 V (3 pièces)
connecteurs à broches
Circuit imprimé
Une image vaut plus que mille mots, alors regardez le schéma de connexion des pièces sur une carte de circuit imprimé.
Si la sortie «Signal» provient d'un Arduino, le relais s'allumera. Le transistor amplifie le signal pour fournir une puissance suffisante au relais. Nous utiliserons 37-38-39 contacts pour contrôler les niveaux HIGH LOW de chaque relais.
Pour installer des pièces sur un boîtier en plexiglas, l'auteur a utilisé du ruban adhésif double face. Il détient à peu près les détails.
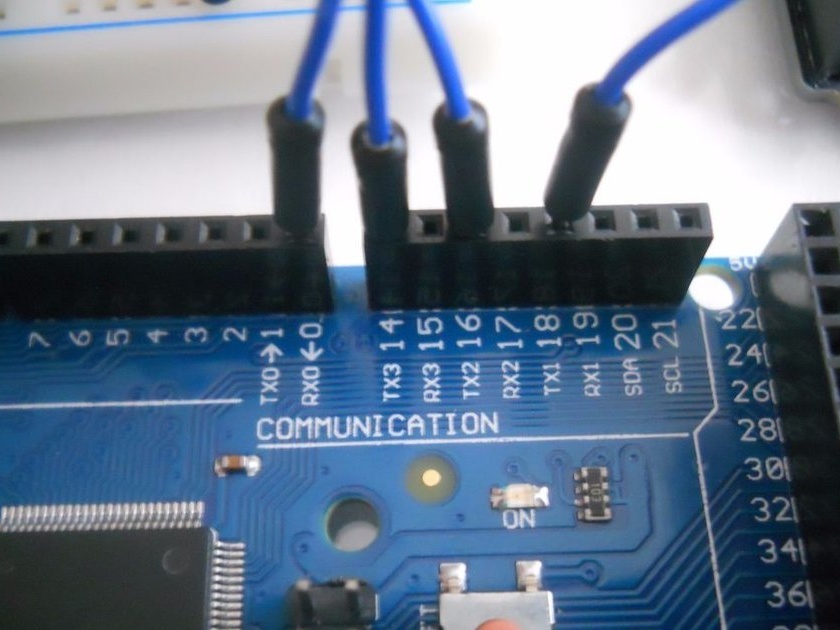
Il s'agit d'un serveur logiciel, donc faire un circuit n'est pas si difficile. Il vous suffit d'activer les microcontrôleurs et d'établir une connexion entre eux. La LED IR est connectée à la broche D3 et le relais est connecté à 37-38-39. Le D16 Arduino Mega va au RX Photon et le D18 au RX Leonardo.
Connexion robot
[2,02 Ko] (téléchargements: 14)
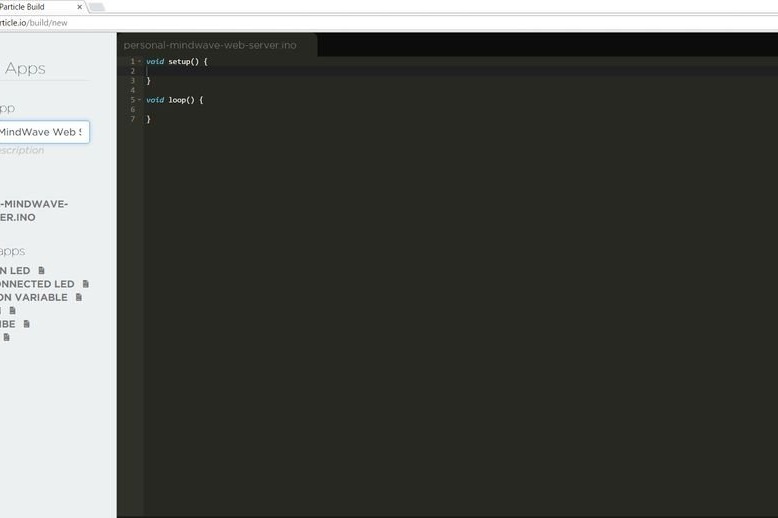
Mais maintenant, le code est prêt et fonctionne, il vous suffit donc de télécharger vos microcontrôleurs. Téléchargez le fichier .ino ou copiez / collez le code dans votre IDE et utilisez-le. Le code pour Particle Photon doit être téléchargé via l'IDE du navigateur. Pour ce faire, inscrivez-vous à. Et connectez votre ordinateur portable à votre microcontrôleur. Tout se passe presque automatiquement, il vous suffit d'ajouter l'ID de votre appareil.
Avant de télécharger les codes, assurez-vous que rien n'est connecté aux broches RX / TX. Déconnectez donc votre module Bluetooth de Mega et déconnectez Mega de Leonardo et Photon.
[489 b] (téléchargements: 15)

Serveur WebPour ajouter la fonction IoT (Internet des objets) à son projet, l'auteur a créé un enregistreur de données en ligne à l'aide de Particle Photon. En fonction de ce que vous faites avec l'appareil, Photon crée un serveur personnel et écrit des données dans le cloud.Cela peut sembler intimidant au début, mais imaginez que vous pouvez déterminer si vous êtes stressé (les niveaux d'attention augmentent et diminuent rapidement) ou vaut-il la peine de dormir
(le niveau de méditation est toujours supérieur à 80)
. Ce serveur Web peut vous aider à vivre plus sainement.
Encodage du navigateur
Particle a également un panneau en ligne où vous pouvez publier toutes les données en utilisant "Particle.publish ();" syntaxe. Les développeurs de barres d'outils ont permis aux utilisateurs de gagner beaucoup de temps.
