
Bonjour à tous mes chers amis! Dans l'article d'aujourd'hui, je voudrais vous montrer une idée assez intéressante fait maison, ce qui peut être fait par presque tous ceux qui ont fait au moins un peu couture et qui connaît un peu Arduino.
En général, nous ferons aujourd'hui simple des robots aspirateur en carton fais-le toi-même. Mais vous me dites, parce que je vous ai déjà dit comment faire vous-même un robot nettoyeur, et vous aurez raison, mais ce robot aspirateur est beaucoup plus simple, moins cher et plus pratique que le précédent. Oui, et ça le modèle modifié et ressemble mieux, et a également une automatisation complète à bord. Ce artisanat, aidera non seulement à passer le temps, mais deviendra également un assistant indispensable dans votre maison ou votre atelier. Bref, la chose est utile et pas compliquée.
Eh bien, assez de la longue préface, allons-y!
Et donc, pour ce produit fait maison, nous avons besoin de:
carton ondulé (beaucoup de carton)
-
fils de connexion
-
-
-Roues pour motoréducteurs
- pilote de pilotes pour Arduino (l'auteur du produit fait maison utilise un pilote de modèle, que vous devez simplement insérer dans l'arduino pour vous connecter, mais vous pouvez utiliser un pilote qui vous convient, l'essentiel est que la tension correspond aux moteurs à engrenages)
-
-bouchons en plastique
- poils d'un balai
-moteur avec ventilateur de turbine, en principe, vous pouvez le faire vous-même
maille en plastique
- petit récipient
boîte pour deux accus 18650
-
Parmi les outils dont nous aurons également besoin:
fer à souder
pistolet à colle
couteau de papeterie
ligne
- crayons ou marqueurs
La première étape consiste à prendre une grande feuille de carton, une règle et une boussole. Nous mesurons 13 cm avec une boussole et dessinons un cercle sur du carton, après quoi nous le découpons, au total nous avons besoin de deux de ces cercles:


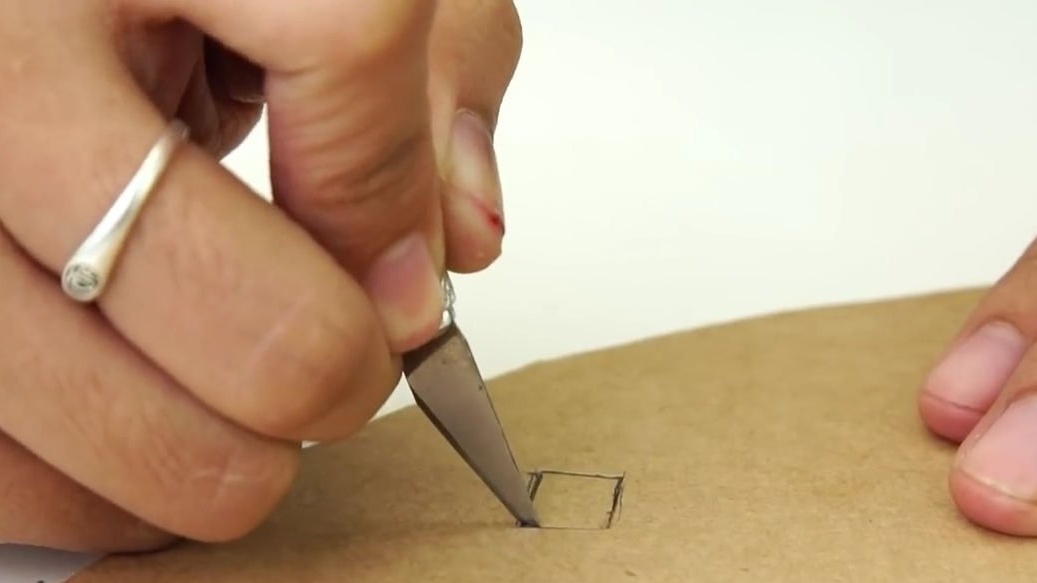
Ensuite, nous découpons un rectangle de petite taille dans le même carton. Nous prenons une règle et un crayon, avec un crayon nous dessinons un carton avec un intervalle d'environ 1 cm.Après cette procédure, nous prenons un couteau de bureau et faisons de petites coupures de la couche supérieure de carton, sans toucher le fond. Cela est nécessaire pour que le carton devienne plus élastique:

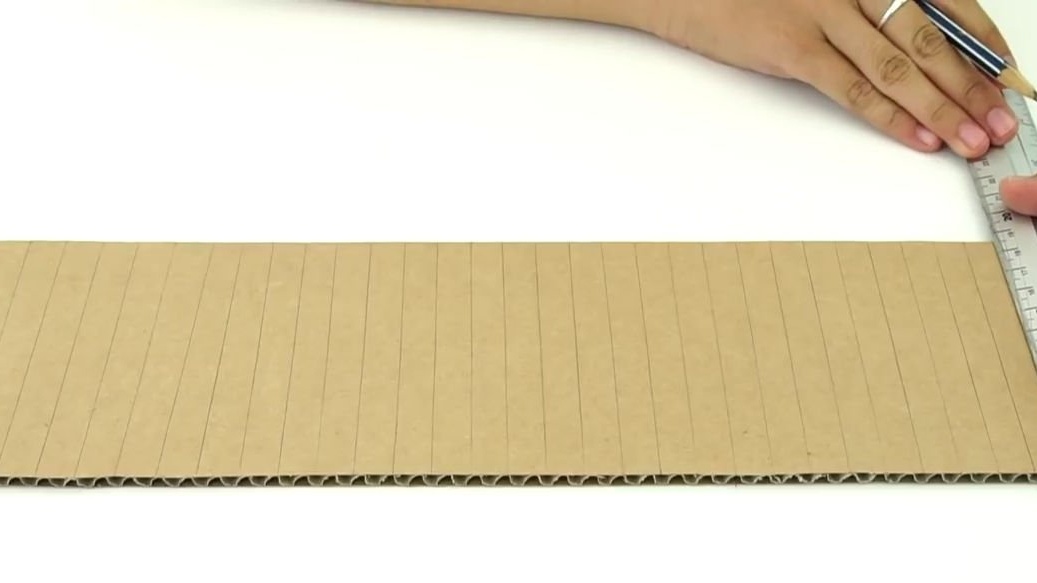


Nous tordons la première pièce réalisée autour d'un des cercles en carton, et bien sûr nous la collons avec de la colle chaude:

Parlons de l'électronique et de la partie mécanique.
Pour commencer, prenez le motoréducteur et mettez une roue dessus, nous faisons de même avec le deuxième moteur:

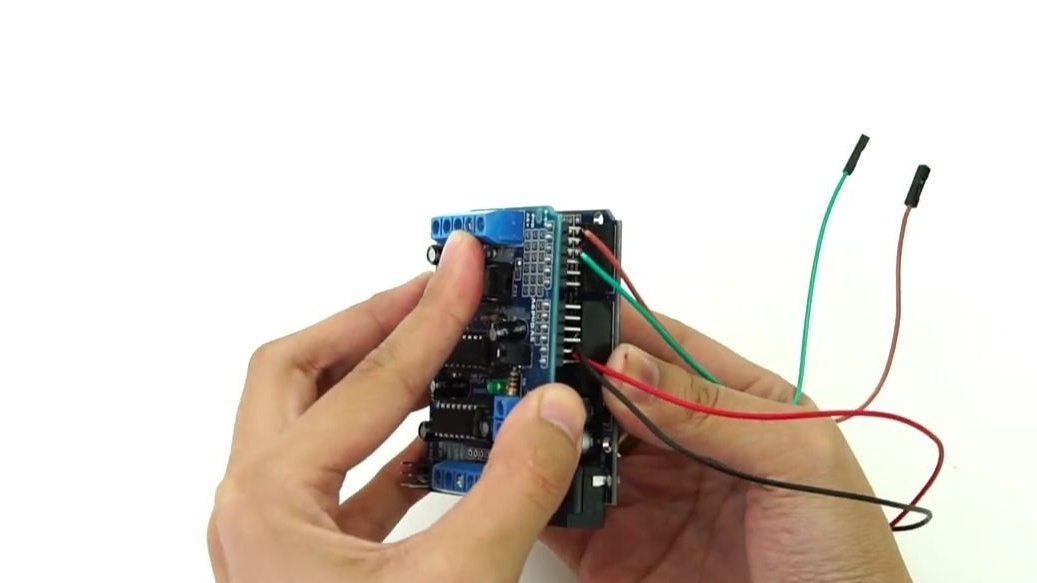
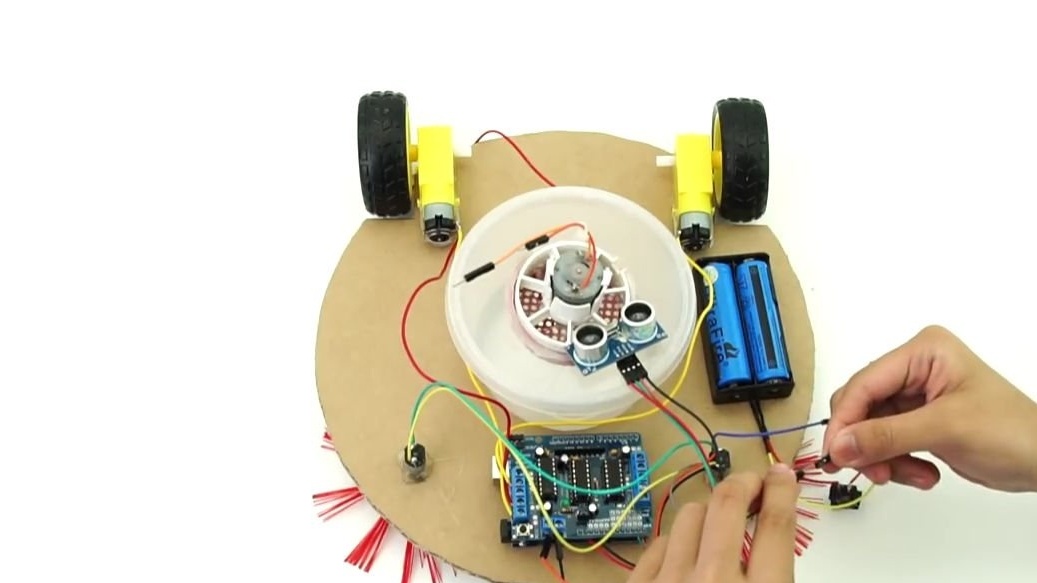
Ensuite, nous prenons la carte Arduino Uno et les fils de connexion, qui à leur tour doivent être connectés à certaines broches (contacts) sur la carte. Pour plus de commodité, nous prenons différentes couleurs: nous connectons le rouge à 5 volts, le noir à GND et les deux à deux autres broches différentes. À quelles broches connecter les fils, vous devez immédiatement le trouver sur la base du code ou écrire les broches auxquelles vos fils sont connectés. En général, il n'y a rien de compliqué ici, on se connecte:

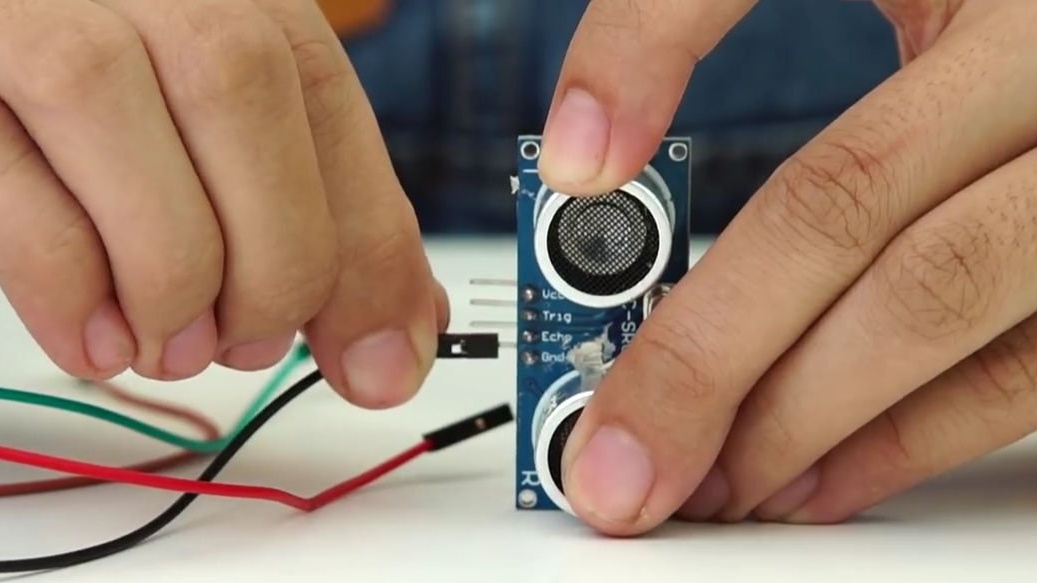
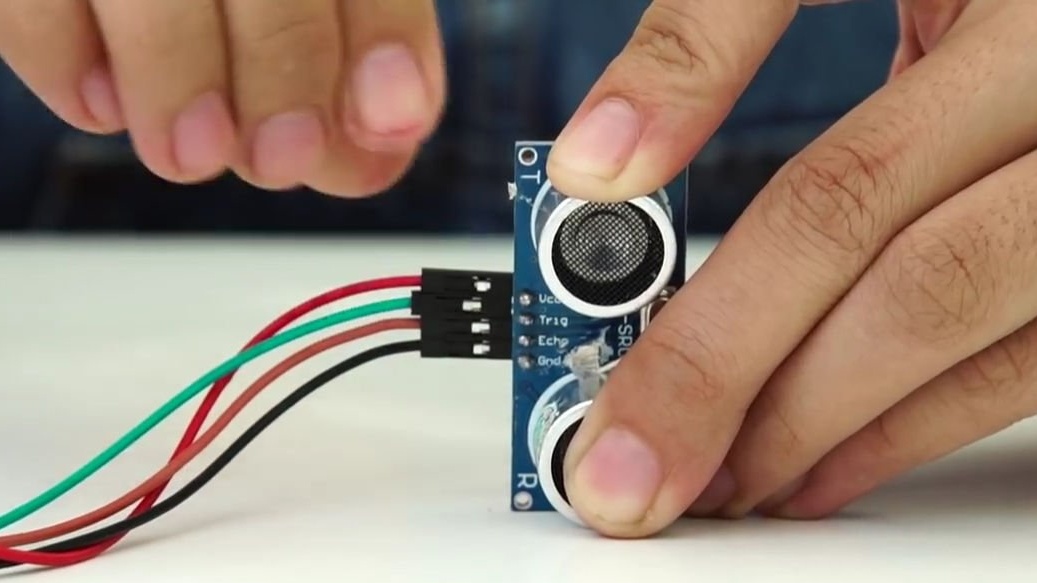
Nous connectons le côté opposé des fils au télémètre à ultrasons comme indiqué sur la photo ci-dessous, si ce n'est pas clair, vous pouvez regarder la vidéo de l'auteur.
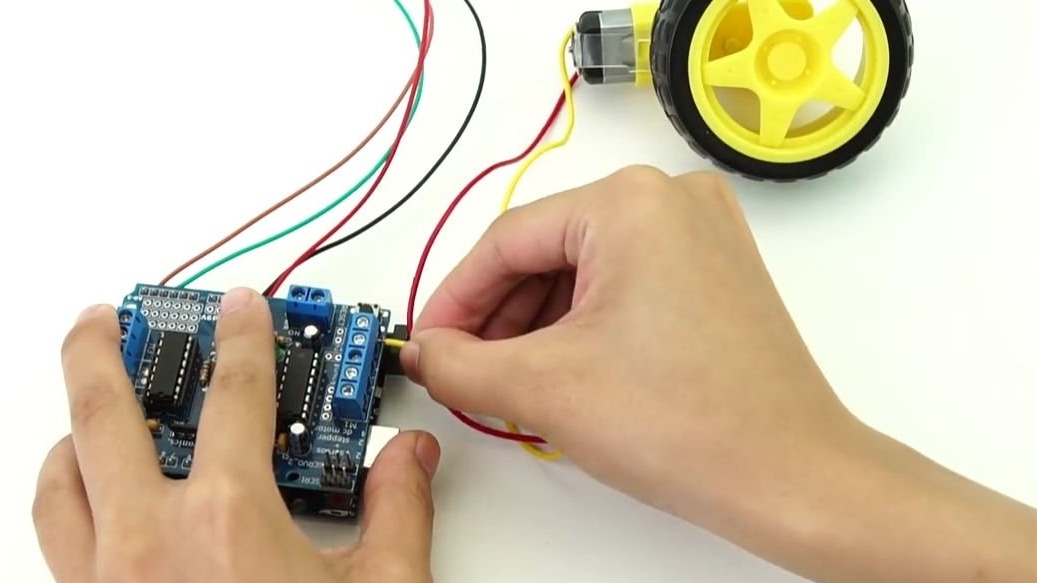
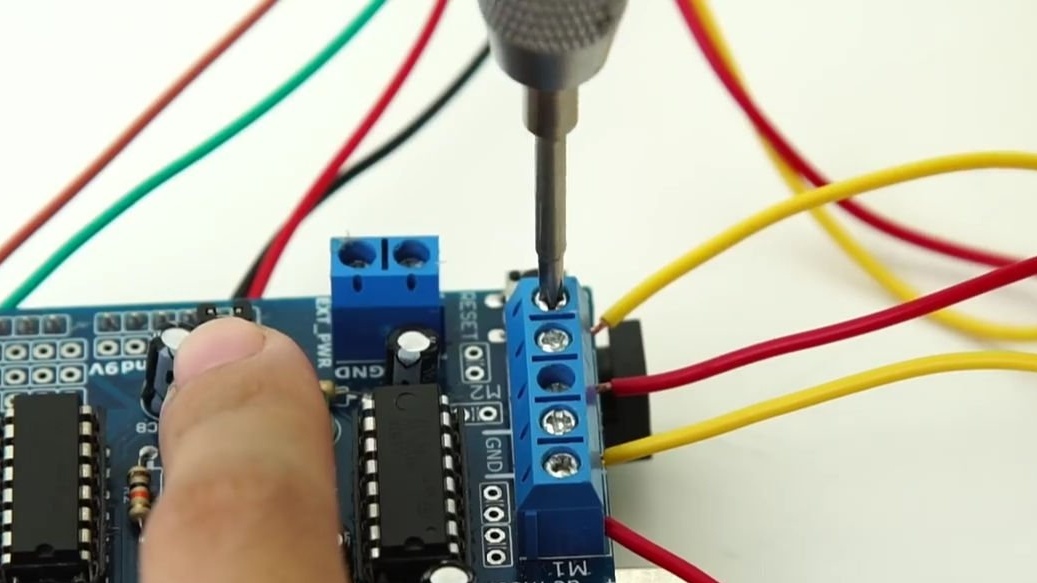
Nous connectons les motoréducteurs au pilote du moteur, vous n'avez même pas besoin de souder quoi que ce soit, insérez-le simplement dans les pinces et c'est tout:

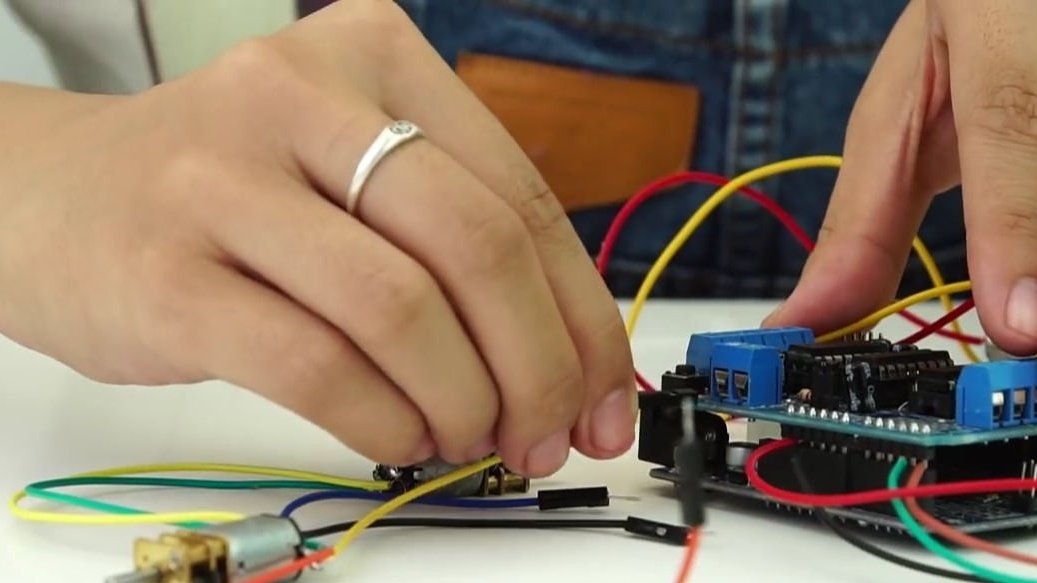
Il est nécessaire de souder les fils de connexion aux mini moteurs, à l'aide de quoi, nous connecterons ces mêmes moteurs au pilote du moteur. En général, nous connectons:
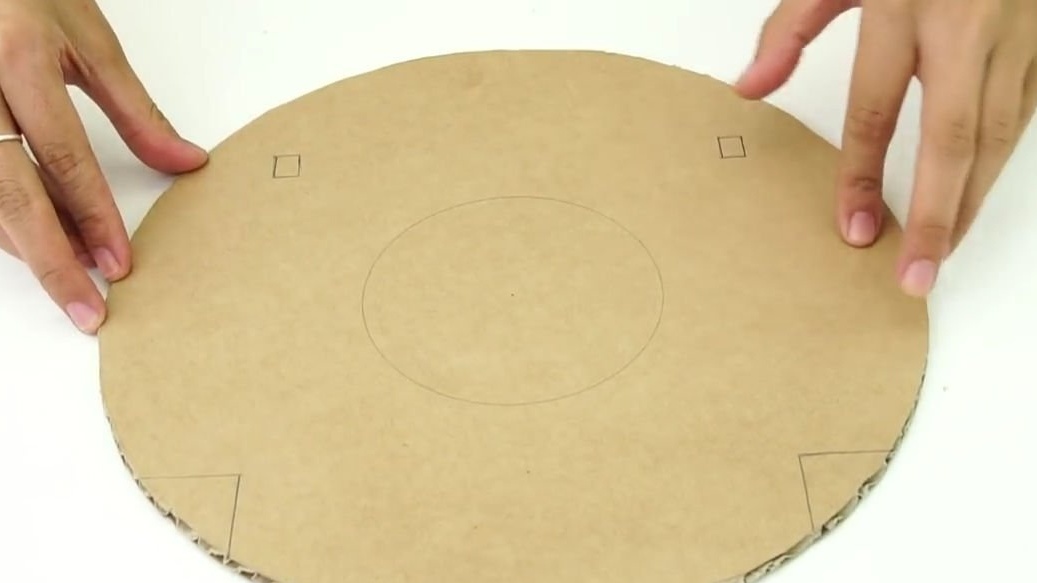
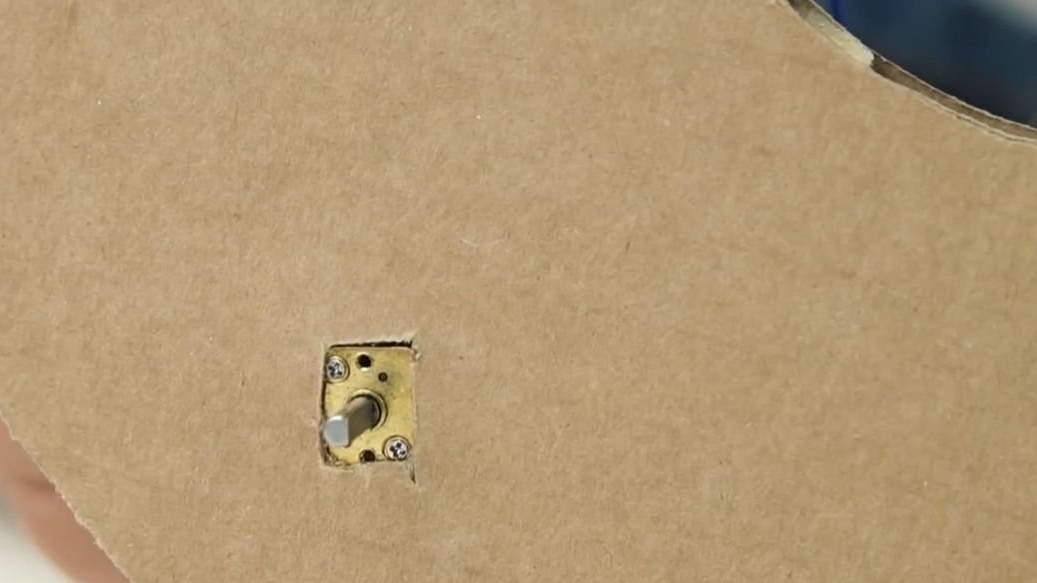
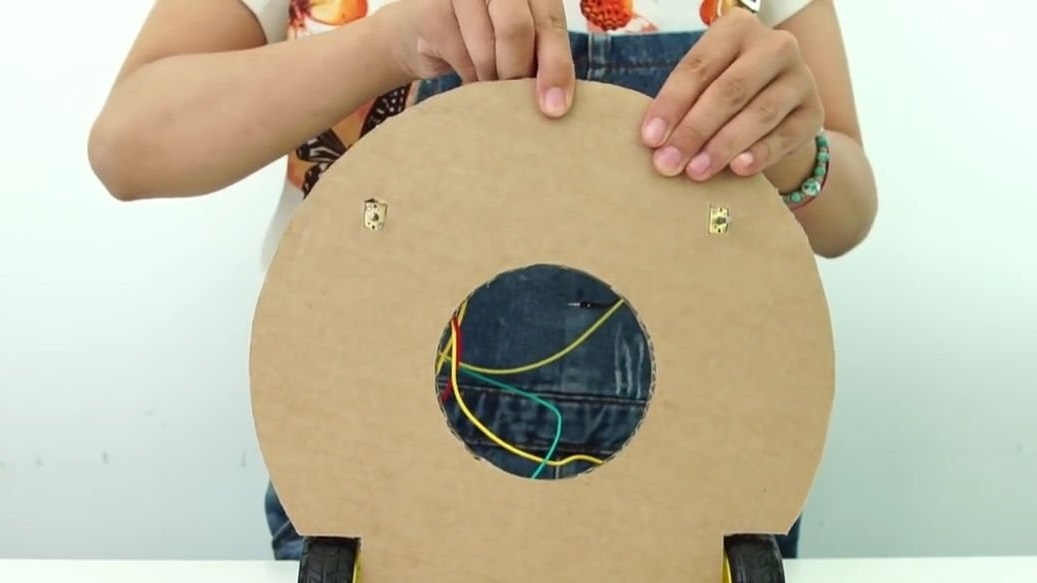
Maintenant, nous prenons le cercle de carton restant, qui a été fait au tout début. Sur celui-ci, vous devez dessiner un autre cercle au centre et plusieurs rectangles. Vous pouvez voir tout le balisage sur la photo ci-dessous. Ensuite, nous découpons les trous marqués, cela devrait se dérouler de la même manière que sur la photo ci-dessous:

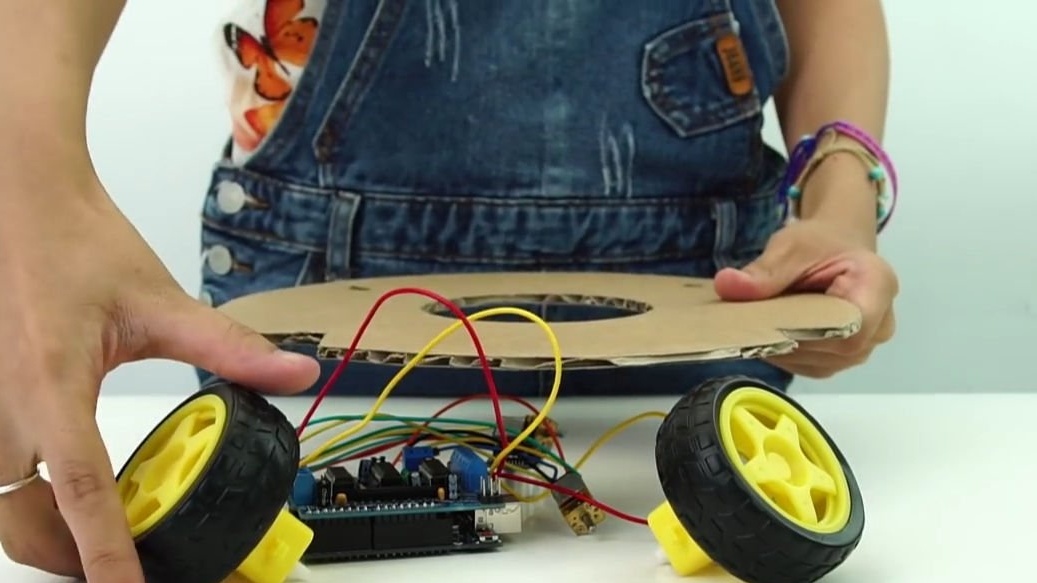
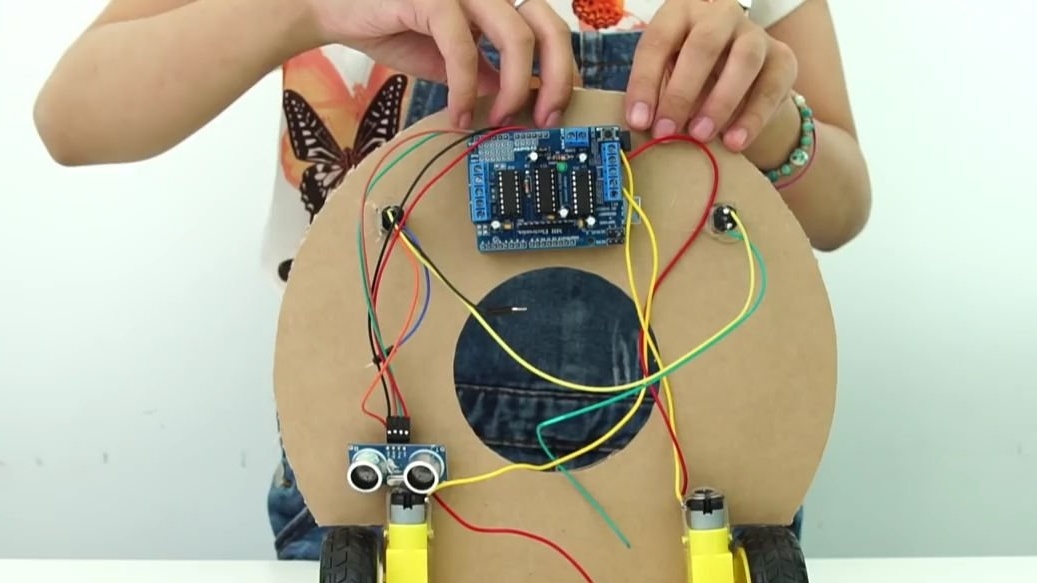
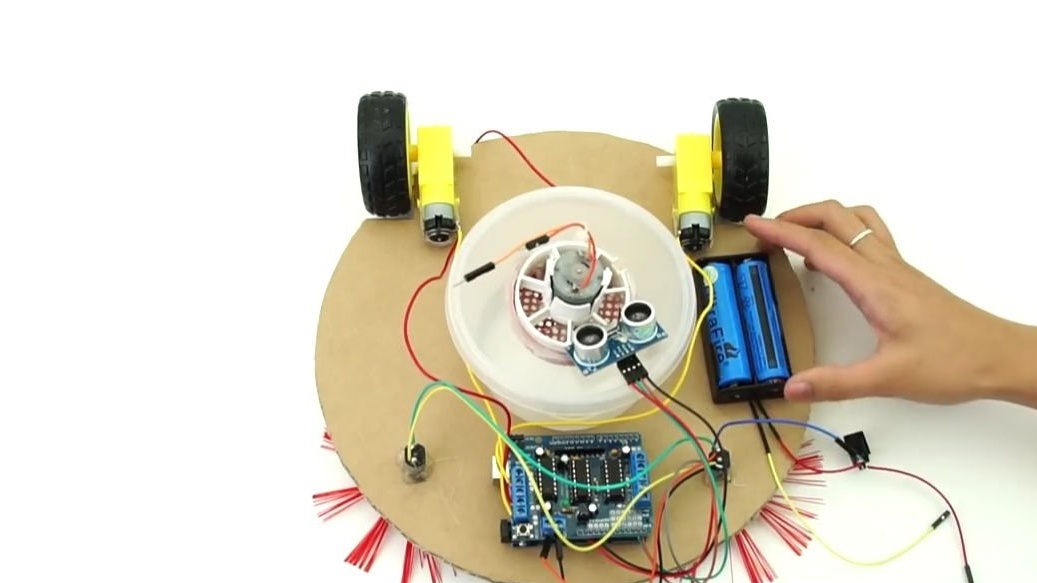
Prenez le tout électronique et placez-le sur un cercle en carton précédemment fait. Nous insérons de petits moteurs dans les trous rectangulaires à fentes et fixons le reste de l'électronique à un adhésif thermofusible, fixons de gros motoréducteurs en parallèle à l'arrière et ne touchons pas au télémètre à ultrasons:

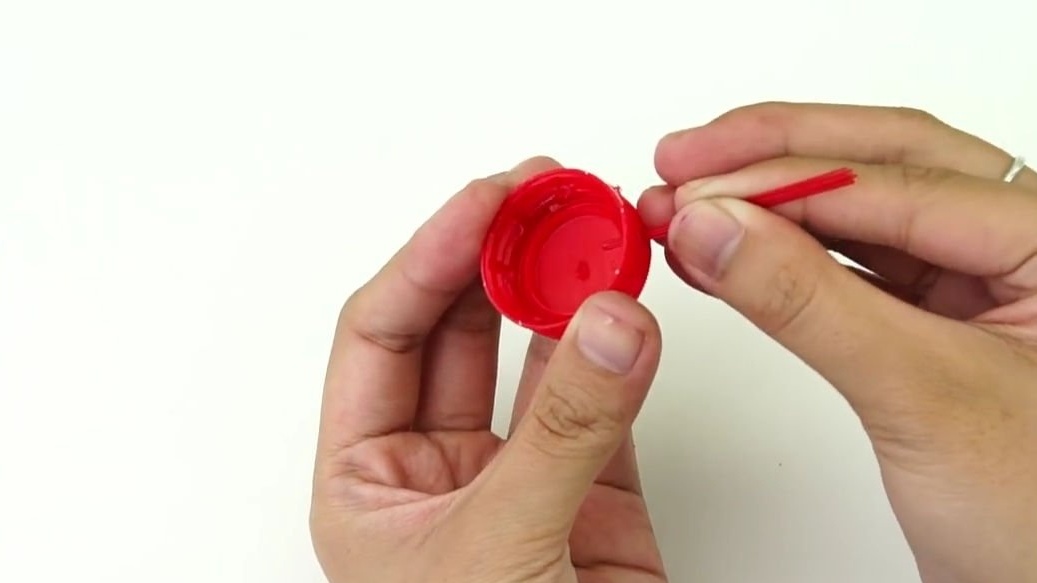
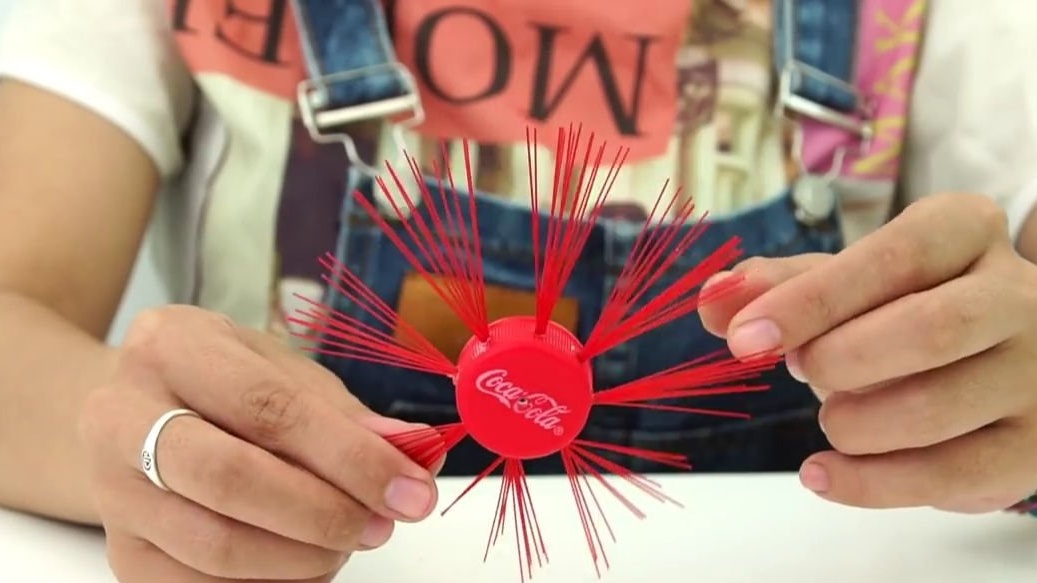
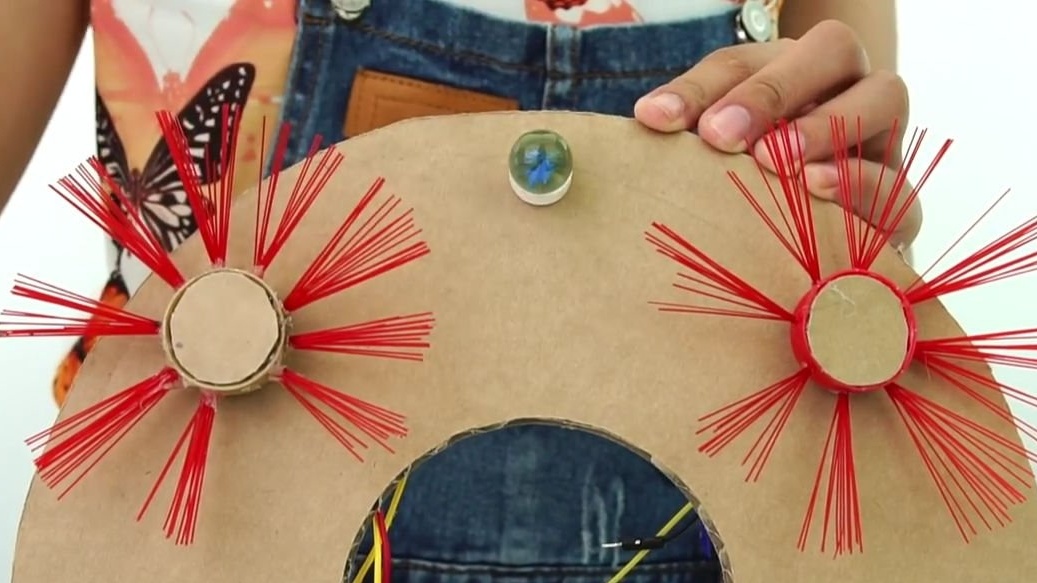
Nous retirons les bouchons des bouteilles en plastique, nous n'avons besoin que de deux pièces. À l'aide d'un fer à souder, d'un clou chaud ou d'un poinçon, nous faisons des trous: l'un au centre du couvercle, et l'autre sur les côtés avec un retrait d'environ 1 cm. Nous fixons ces poils avec de la colle chaude. Au total, deux de ces blancs doivent être réalisés.
Nous les collons sur l'axe des petits moteurs, qui sont situés sur un cercle en carton. On recolle avec de la colle chaude:


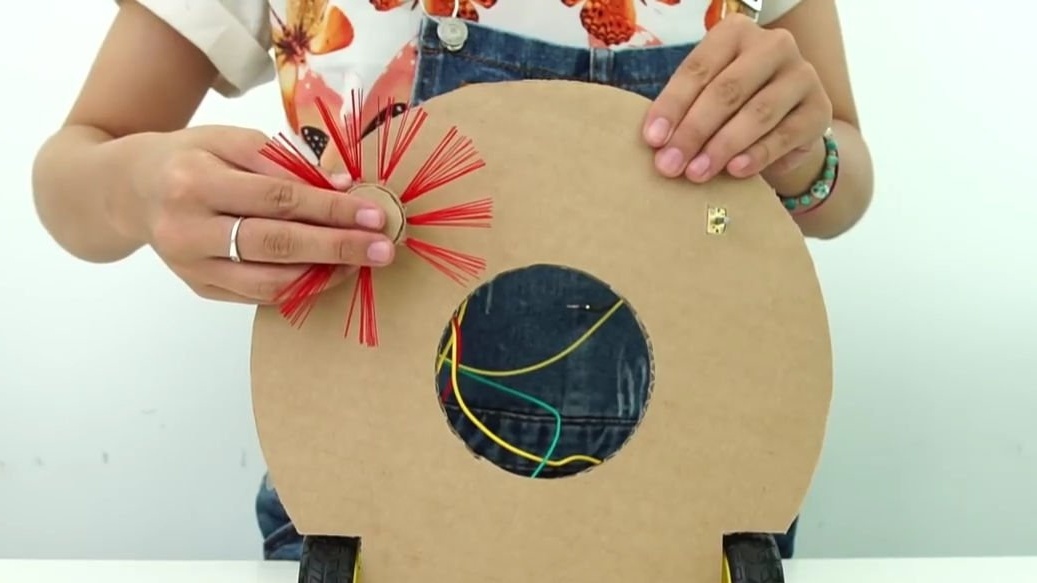

Sur le devant, entre deux pinceaux, collez une petite boule, ou une petite roue qui peut tourner autour de son axe:
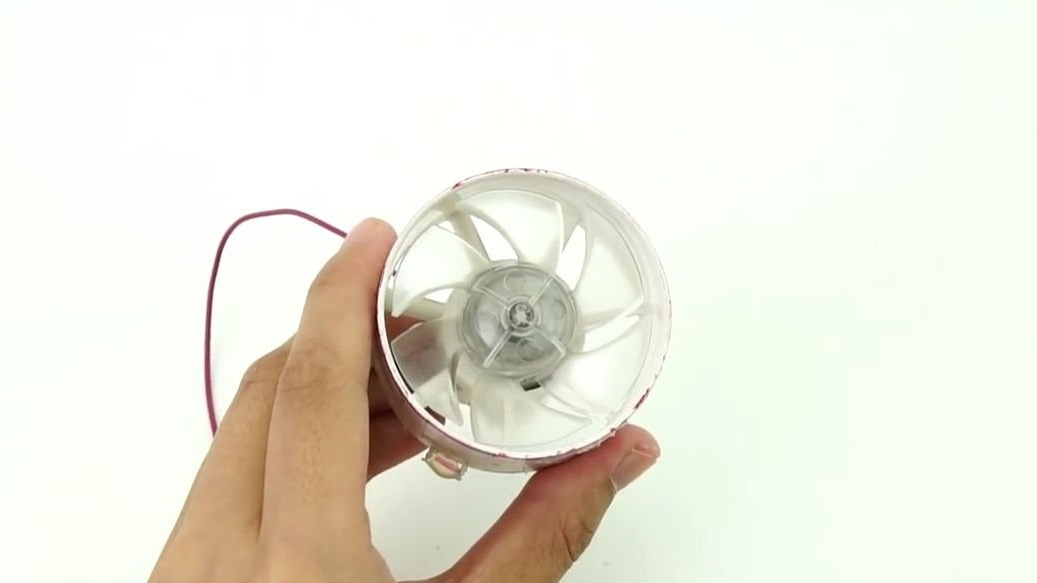
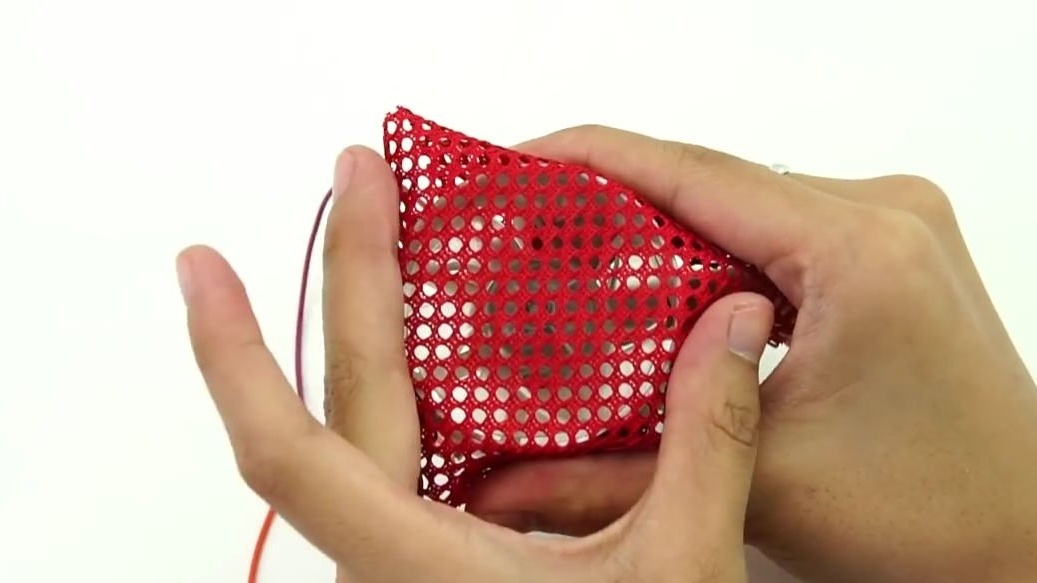
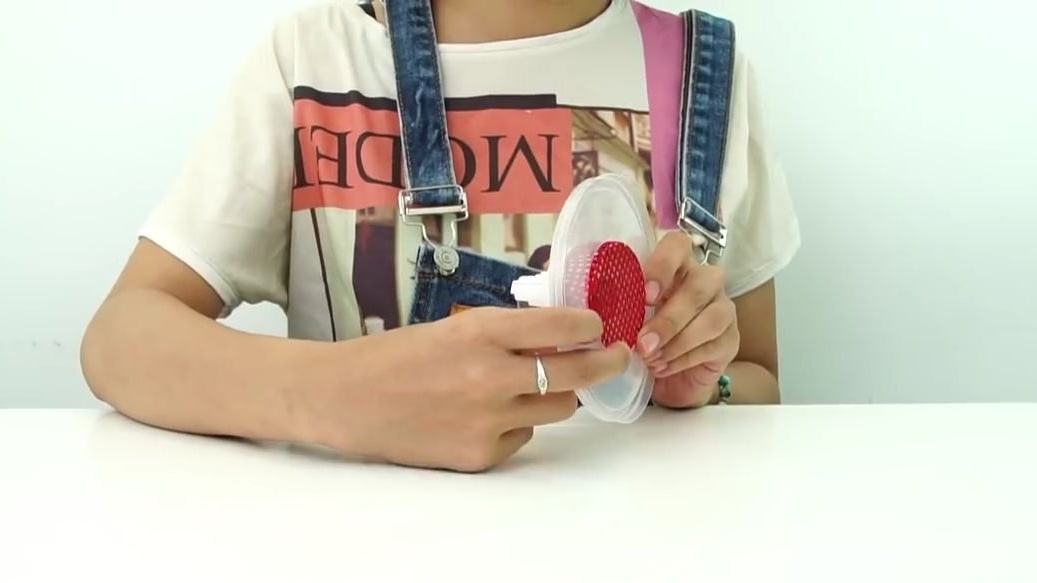
Maintenant, nous avons besoin d'un moteur électrique avec une turbine qui peut aspirer de l'air, et en général un refroidisseur très puissant peut apparaître. Nous mettons et fixons un filet en plastique sur la partie avant de la turbine, il est nécessaire de protéger la turbine, c'est-à-dire d'empêcher les gros débris de pénétrer et de tamiser. Retirez le couvercle du récipient en plastique. Le récipient doit de préférence être de forme ronde. Dans le couvercle, nous réalisons un trou rond uniforme dans lequel vous devez insérer et coller la turbine avec un maillage. Dans le conteneur lui-même, nous faisons un petit trou rectangulaire avec le bord. Nous avons mis le couvercle avec la turbine sur le récipient et vous avez terminé. La partie aspiration du robot est terminée. Je tiens à vous rappeler que tout doit être fait comme indiqué sur la photo ci-dessous:



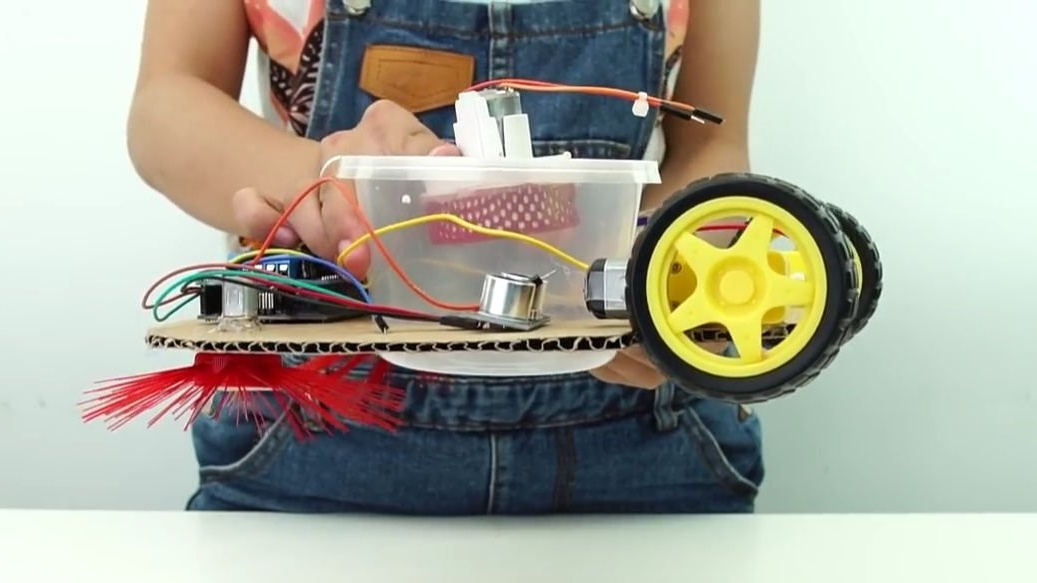
Nous prenons la base du robot et installons un récipient avec une turbine dans le trou central et collons le tout fermement avec de la colle chaude. Ensuite, sur le côté de la structure, nous installons un boîtier avec des batteries 18650 et un interrupteur connecté à l'un des fils provenant du boîtier. Nous connectons de nouveaux fils pour alimenter Arduino, nous faisons les coupes de cheveux finales et nous pouvons continuer.
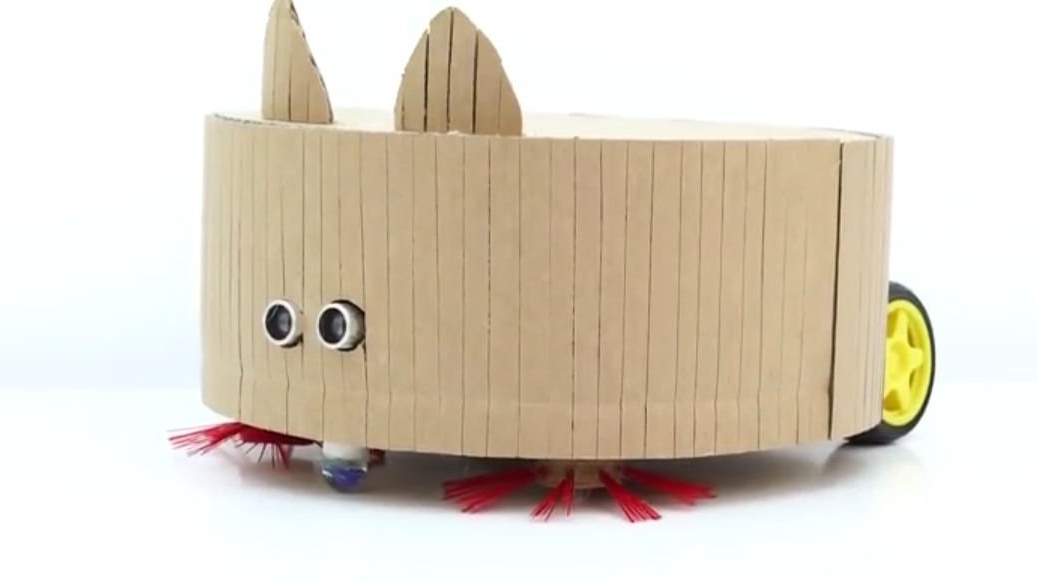
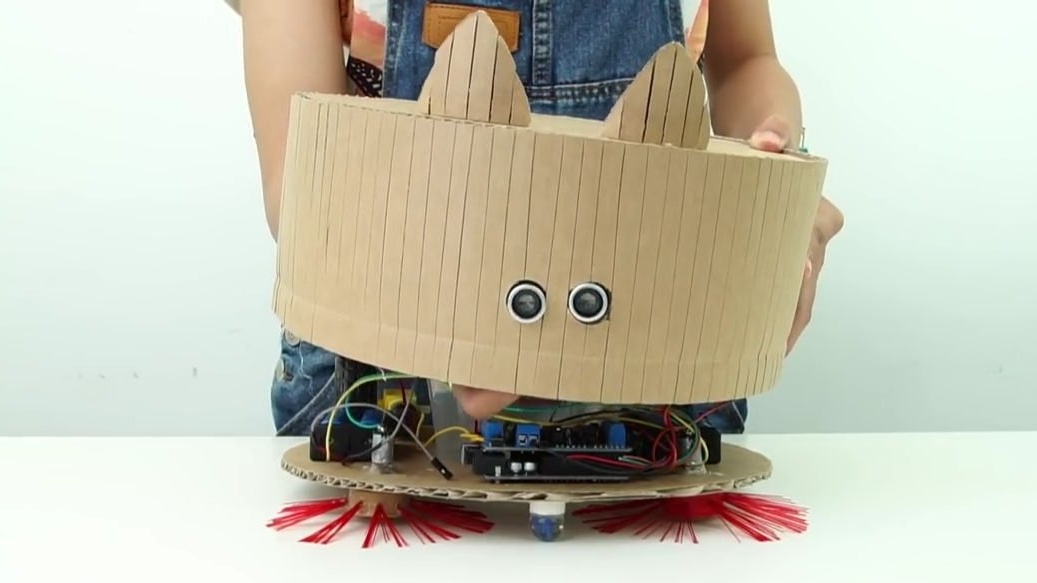
Nous insérons le télémètre à ultrasons dans des trous spéciaux qui doivent être réalisés à l'avance dans le corps du robot. Ce bâtiment, vous vous en souvenez peut-être, a été construit au début. L'auteur de l'article a également ajouté des éléments décoratifs en forme d'oreilles, et un télémètre à ultrasons sort à la place de l'œil, tout cela semble très bon. Nous plaçons le boîtier sur la base de la structure et le réparons, mais pas beaucoup, car dans ce cas, vous devrez obtenir les batteries pour les charger.Bien sûr, vous pouvez installer un modèle pour charger les batteries directement dans le robot, mais il est peu probable qu'il remplace une charge de haute qualité.

Il ne reste plus qu'à télécharger le firmware sur Arduino, en général, il est préférable de le faire après avoir connecté tous les composants électroniques pour vérifier le circuit et le code, mais vous pouvez le faire plus tard. Il est préférable d'écrire vous-même un croquis à verser sur Arduino, mais vous pouvez simplement trouver sur Internet un croquis prêt à l'emploi pour les robots avec un capteur à ultrasons qui contourne un obstacle, l'avantage de ces croquis est maintenant complet. Mais pour éviter divers pièges, \ il vaut mieux écrire de façon indépendante, par vous-même.
Eh bien, c'est tout! Un robot aspirateur simple et fonctionnel est prêt et il ne reste plus qu'à le tester! Pour ce faire, il suffit de l'allumer et de commencer à rouler sur le sol et à aspirer toutes les ordures. Le robot se déplace et tourne lorsque l'obstacle approche, ce qui est beaucoup plus pratique que les modèles précédents.



Voici une vidéo de l'auteur avec un montage détaillé et des tests faits maison:
Vous pouvez également alimenter ce robot à partir d'une banque puissante, vous pouvez voir mon examen détaillé pour un bon, bien sûr, qui sera intéressé par ceci:
Eh bien, tout le monde a de la chance dans ses futurs projets, amis!