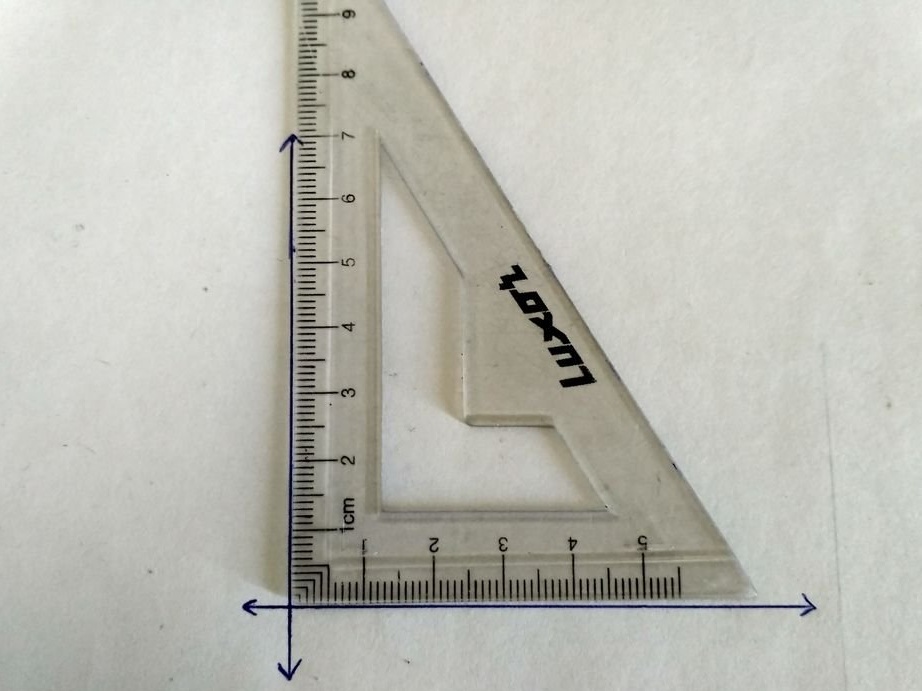

L'assistant a créé un appareil qui fonctionne comme un niveau numérique + une règle + un rapporteur + un ruban à mesurer. L'appareil est suffisamment petit pour tenir dans une poche et sa batterie se charge facilement à l'aide d'un chargeur de téléphone.
Cet appareil utilise un accéléromètre et un capteur gyroscopique pour mesurer avec précision le niveau et l'angle, un capteur infrarouge pour la mesure sans contact d'une longueur linéaire de 4 à 30 cm, un capteur avec une roue qui peut être roulée le long d'une surface incurvée ou une ligne incurvée pour mesurer la longueur d'un objet.
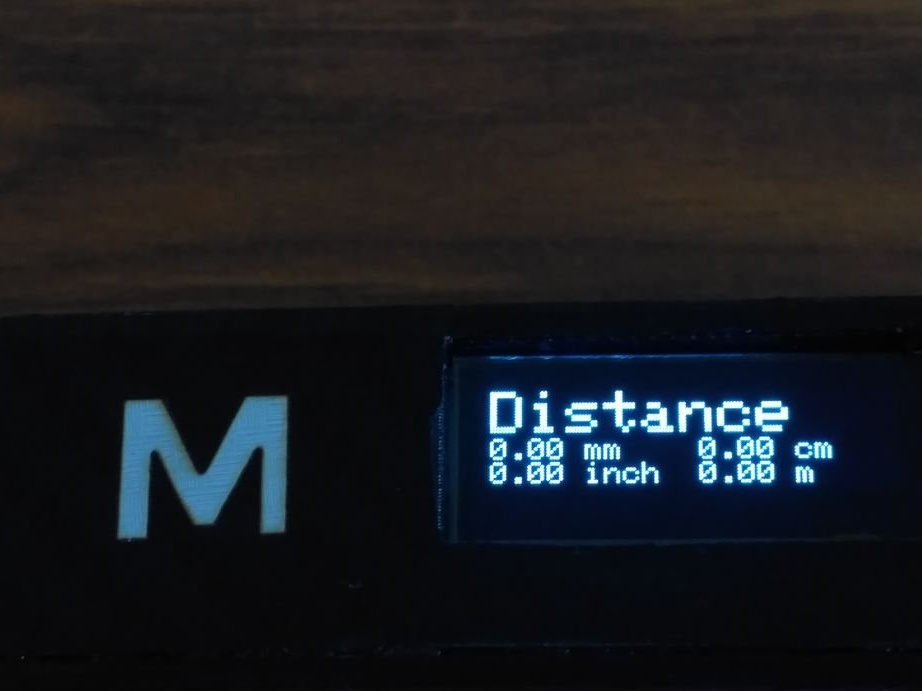
La navigation dans les modes et fonctions de l'appareil s'effectue à l'aide des touches tactiles, désignées par M (mode), U (unité) et 0 (zéro).
M - choix entre différents types de mesures
U - pour choisir entre les unités de mesure mm, cm, pouces et mètre
0 - Remettez les valeurs mesurées à 0 après avoir mesuré la distance ou l'angle.
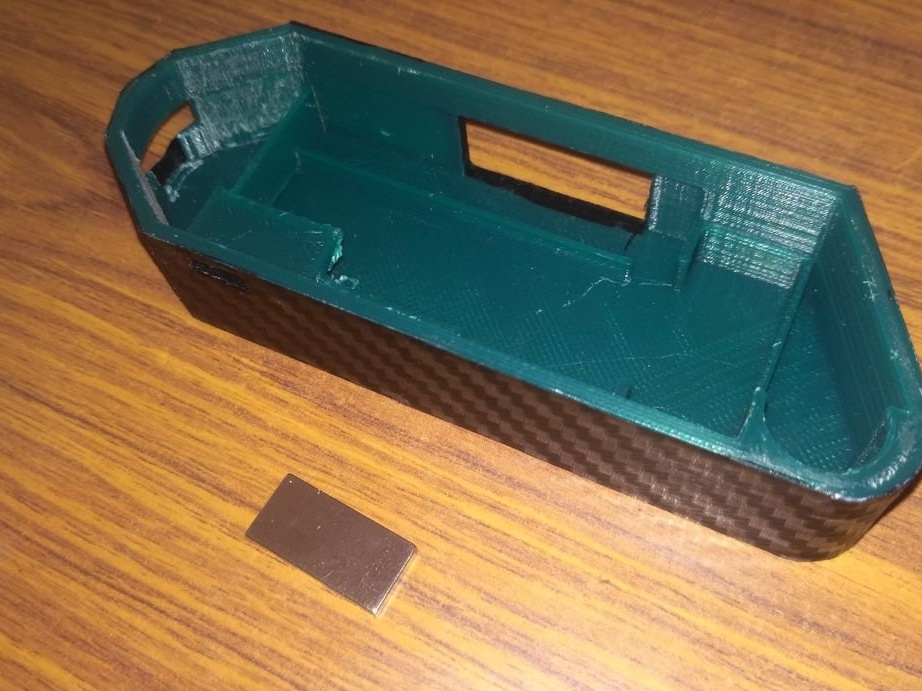
L'appareil possède un aimant en néodyme intégré à sa base afin qu'il ne glisse pas et ne glisse pas sur la surface métallique à mesurer.
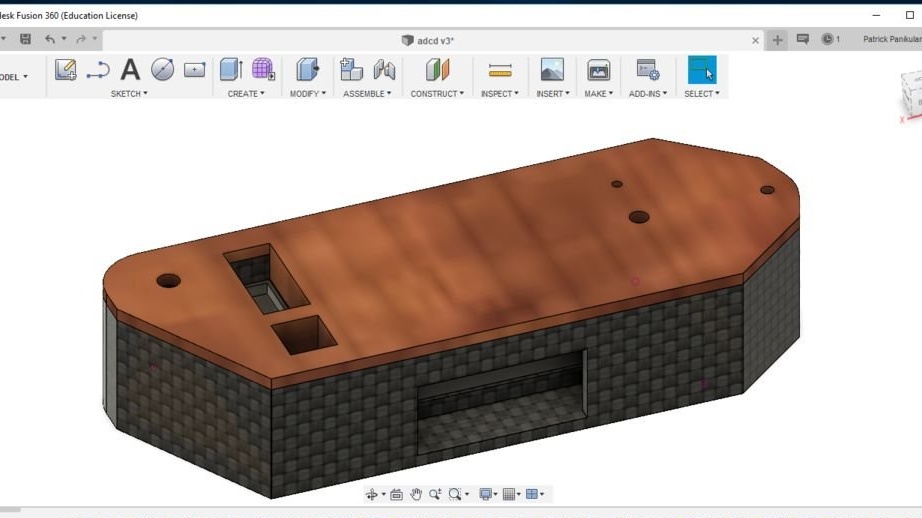
Le boîtier est conçu pour rendre l'appareil aussi compact que possible.
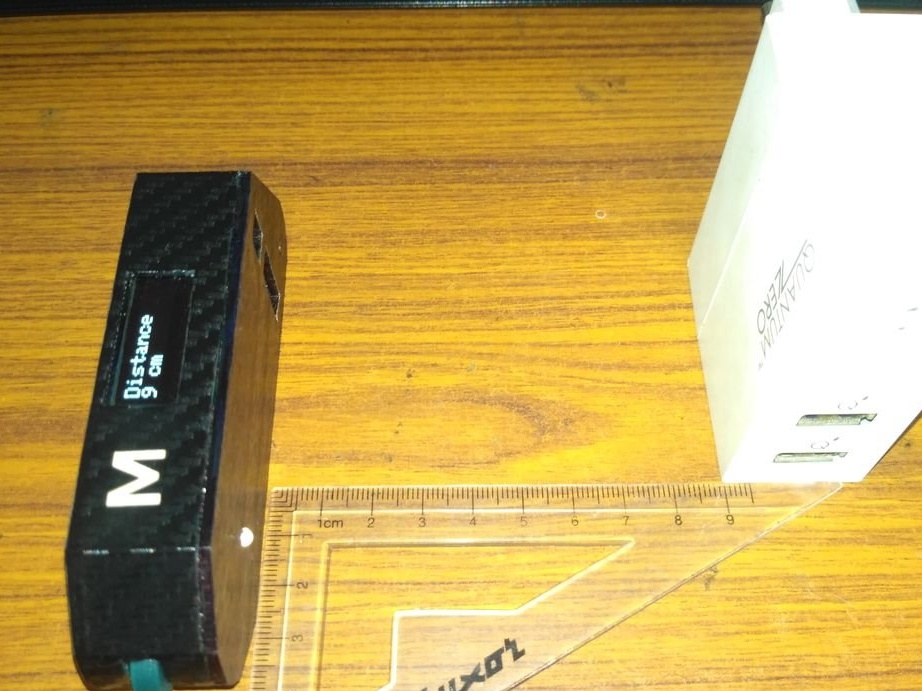
Regardons une vidéo avec des exemples de fonctionnement de l'appareil.
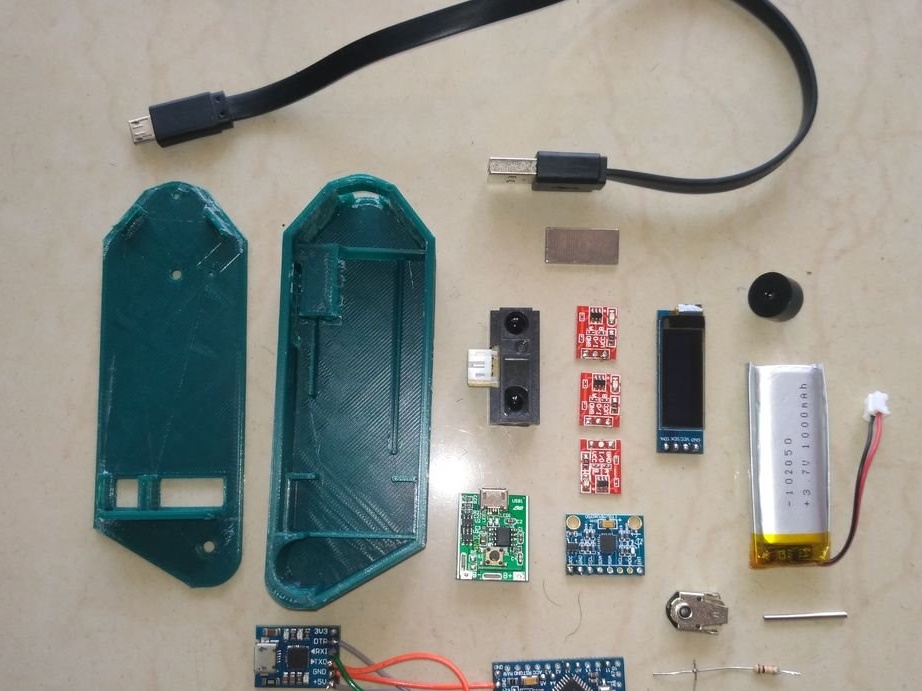
Outils et matériaux:
- Capteur de distance IR Sharp GP2Y0A41SK0F;
- Module accéléromètre / gyroscope MPU6050;
-Module de charge;
Encodeur
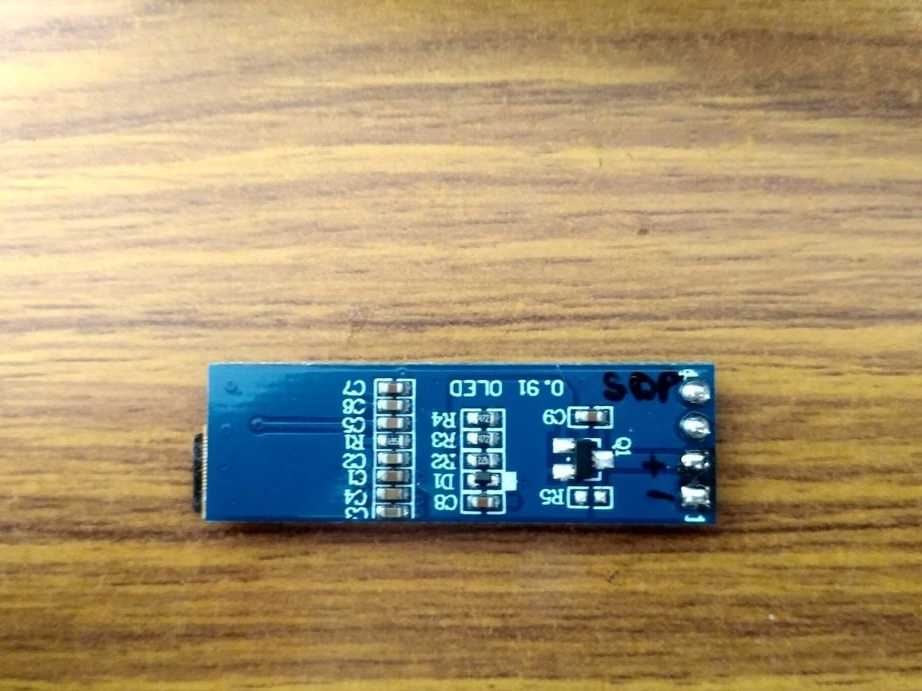
-Écran OLED 128 x 32;
-Arduino pro mini ATMEGA328 5 V / 16 MHz;
-12 mm buzzer;
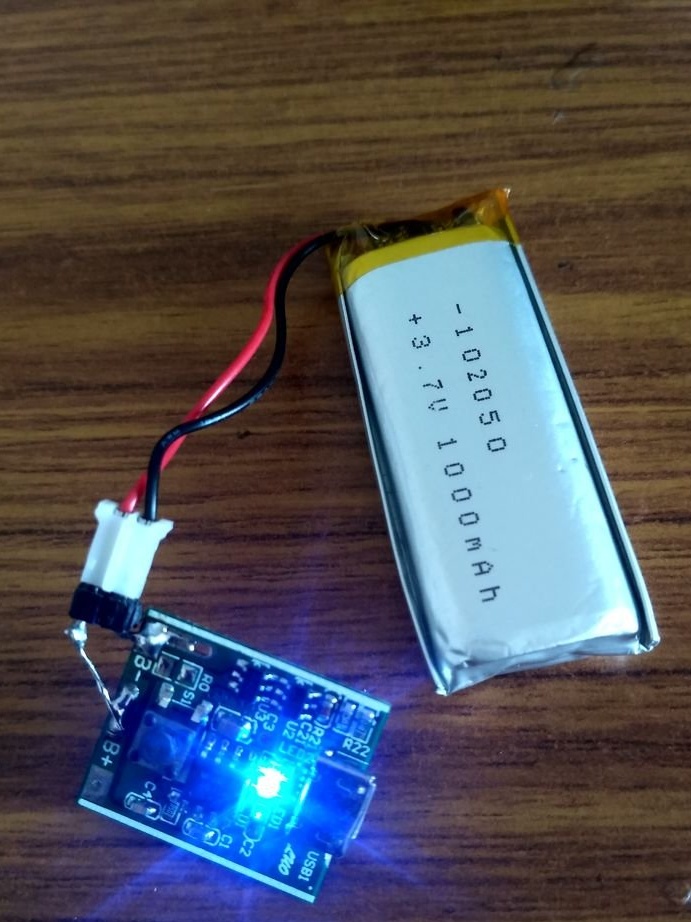
-3,7 V, batterie lithium-polymère 1000 mAh;
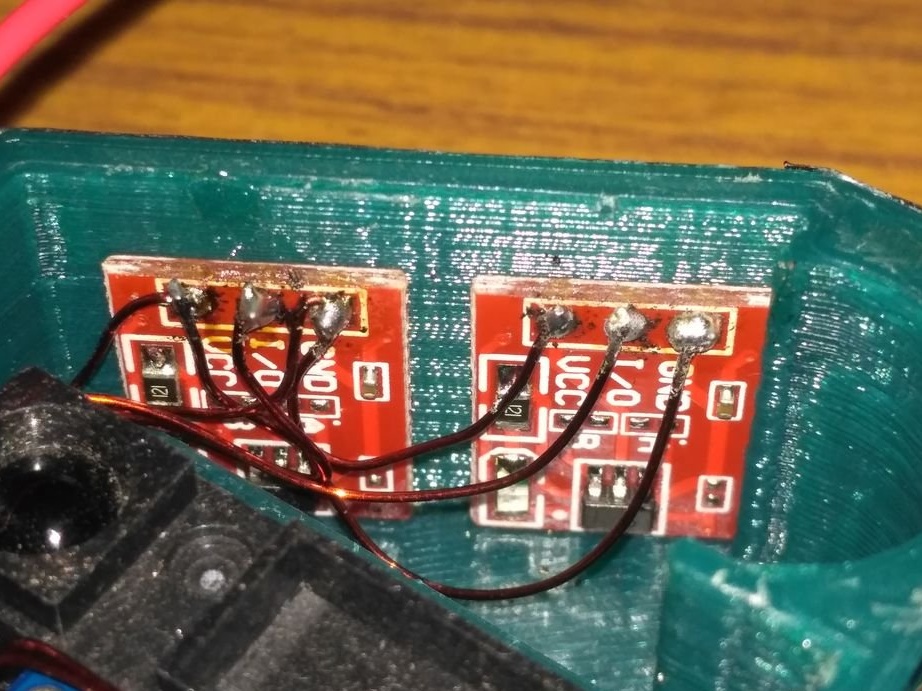
- Module bouton tactile TTP223 - 3 pièces;
- Aimant néodyme 20x10x2 mm;
-Interface convertisseur CP2102;
Fil de cuivre émaillé;
-Résistances 10K - 2 pièces;
- Tige en acier de 19 mm de long avec un diamètre de 2 mm;
-LED LED;
-Film vinyle;
- Câble micro USB;
- ciseaux;
-Knife;
- des pincettes;
-Pistolet à colle;
-Super-colle;
-Accessoires de soudure;
-Coupe laser;
- Imprimante 3D;
-Pinces;
-Papier déchet;

Première étape: le cas
Tout d'abord, l'assistant imprime un boîtier sur une imprimante 3D. Les fichiers à imprimer peuvent être téléchargés ci-dessous.
BODY.stl
Lid.stl
wheel.stl
Il colle le boîtier avec un film vinyle, préalablement poncé sa surface.







Deuxième étape: schéma
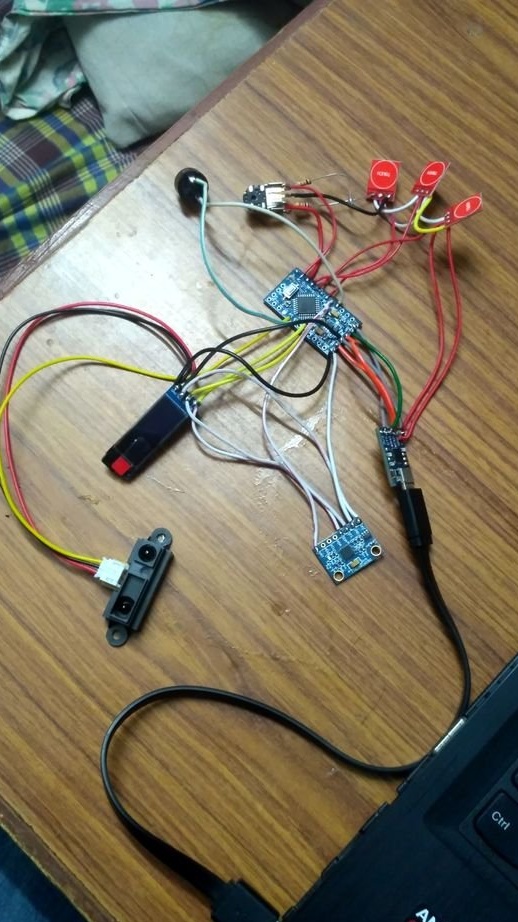
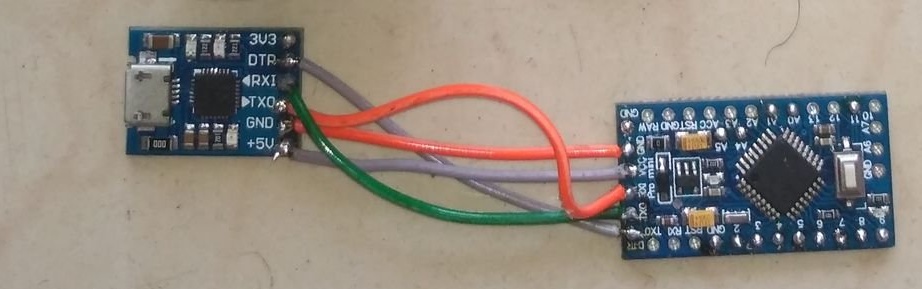
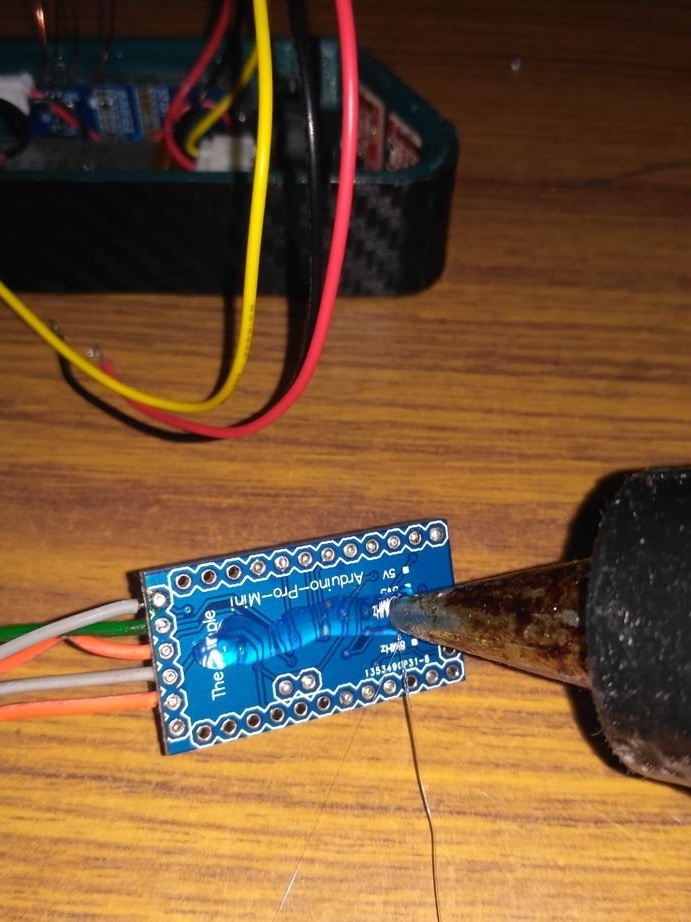
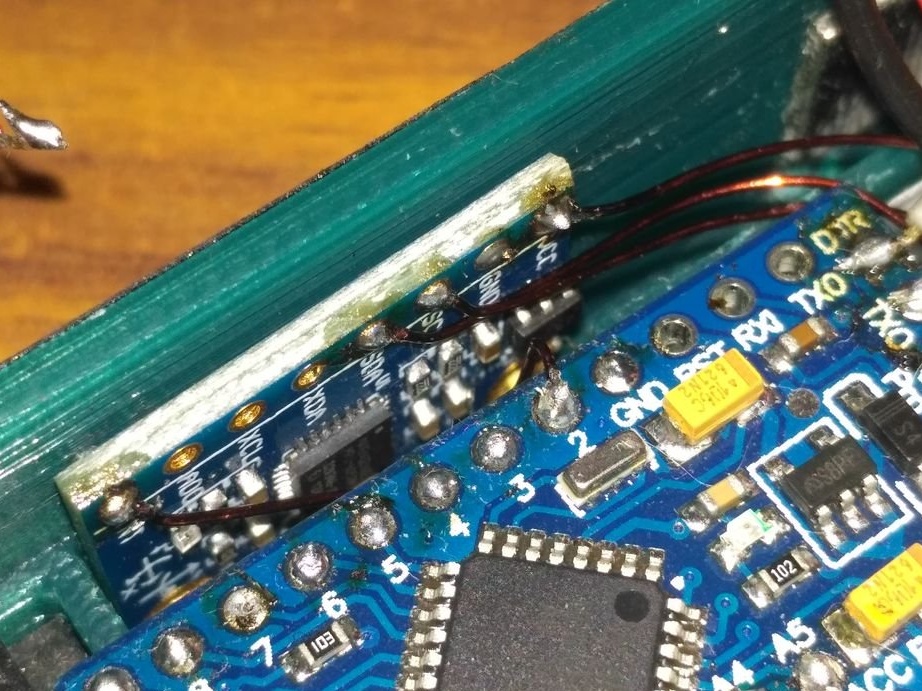
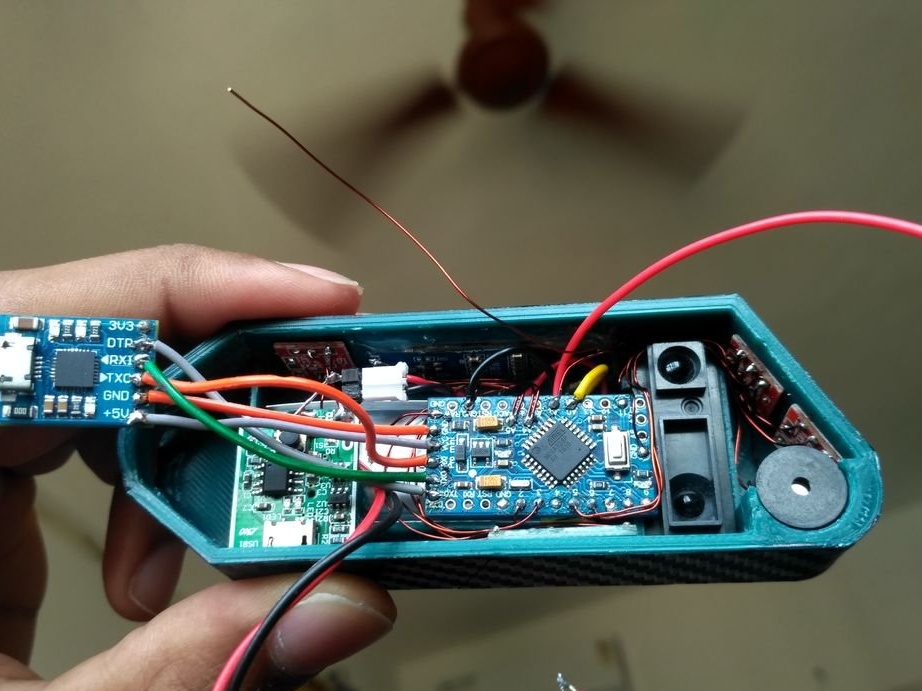
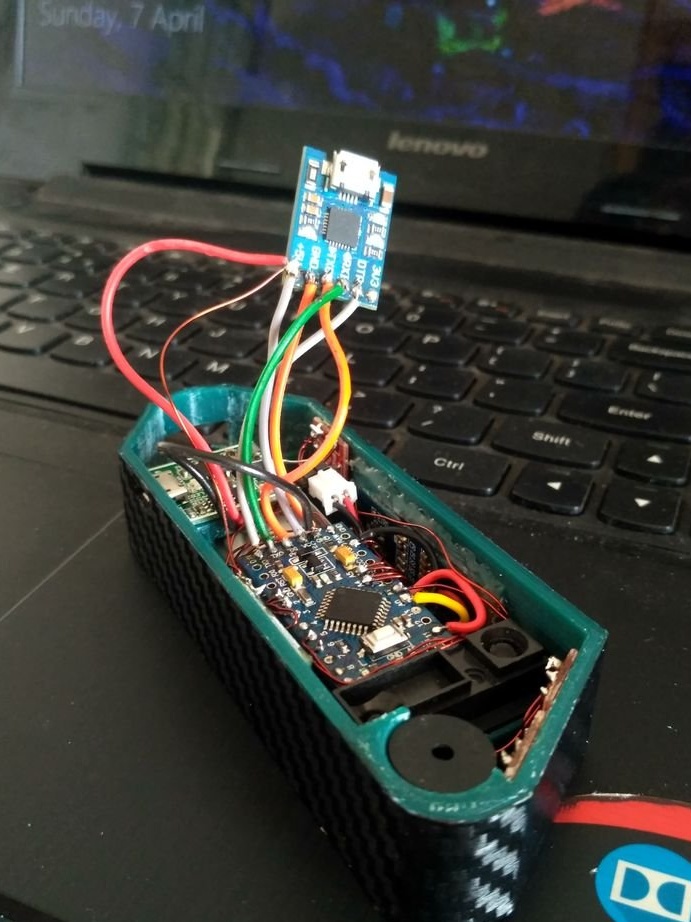
Contrairement à Arduino nano, pro mini ne peut pas être programmé directement en connectant un câble USB. Par conséquent, vous devez d'abord connecter un USB externe au mini convertisseur pro afin de le programmer. La première photo montre comment ces connexions doivent être établies.
Vcc - 5V
GND - GND
RXI - TXD
TXD - RXI
DTR - DTR
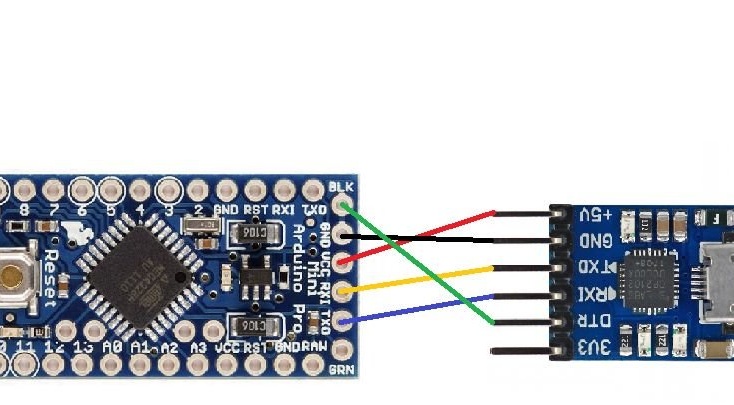
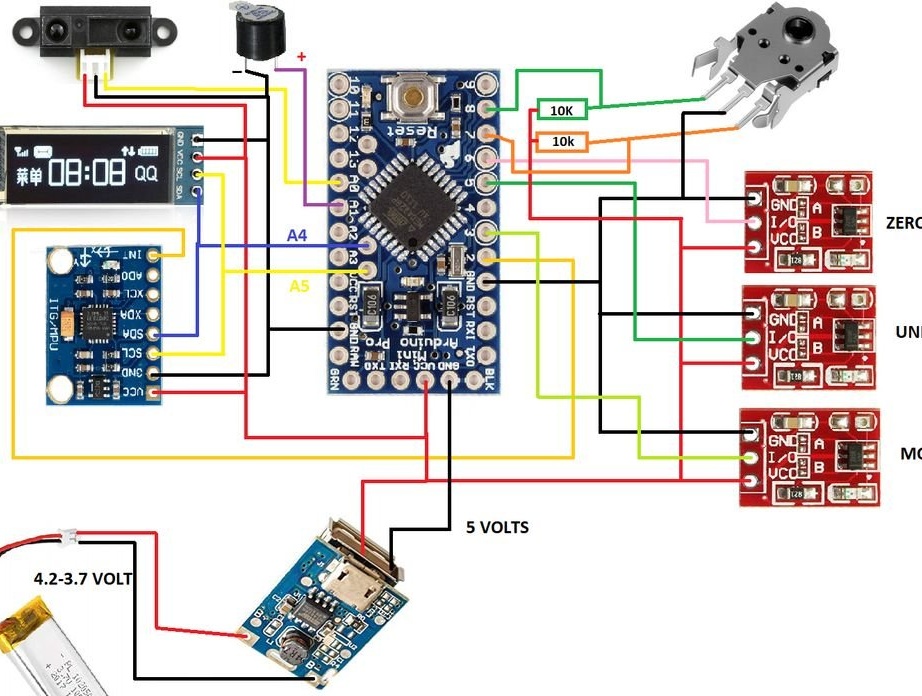
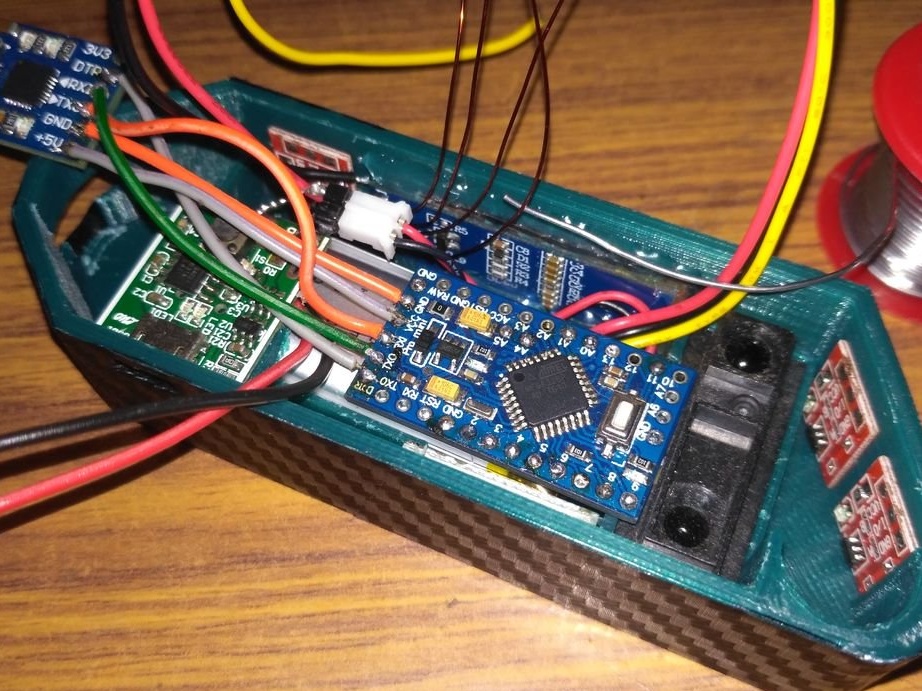
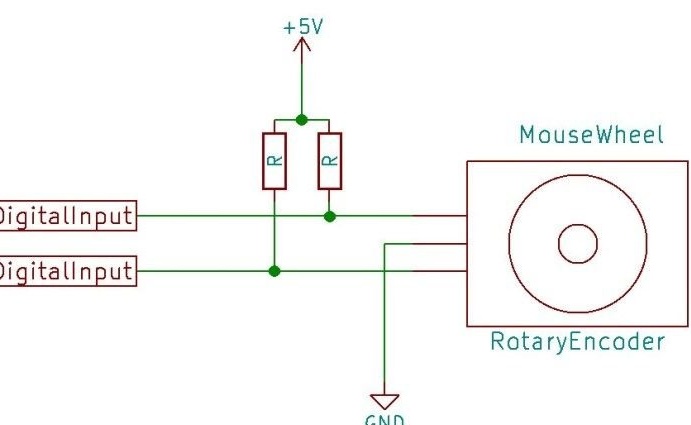
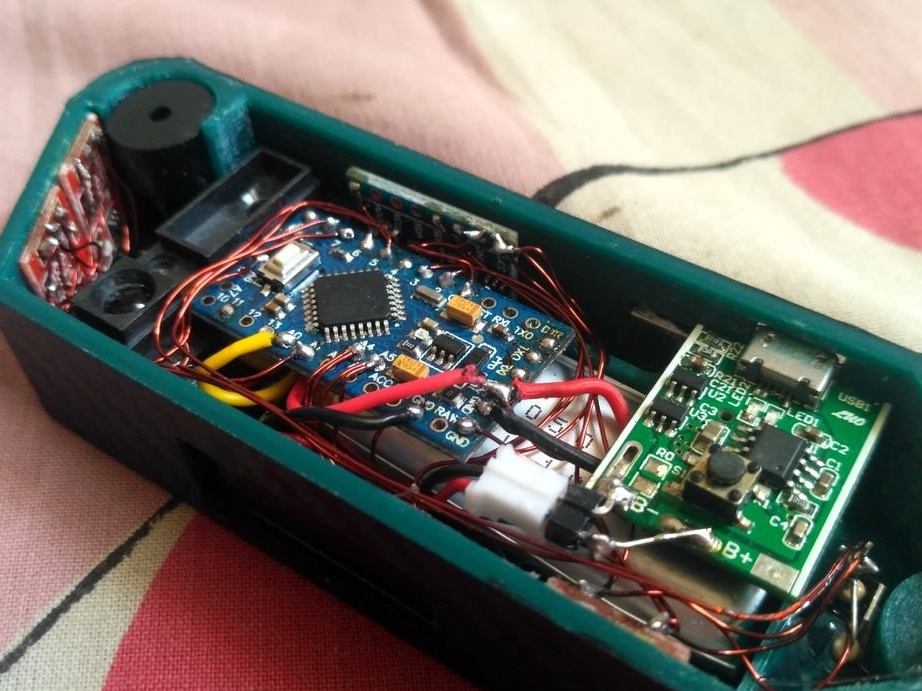
La 2ème image montre le schéma de circuit complet de ce projet.
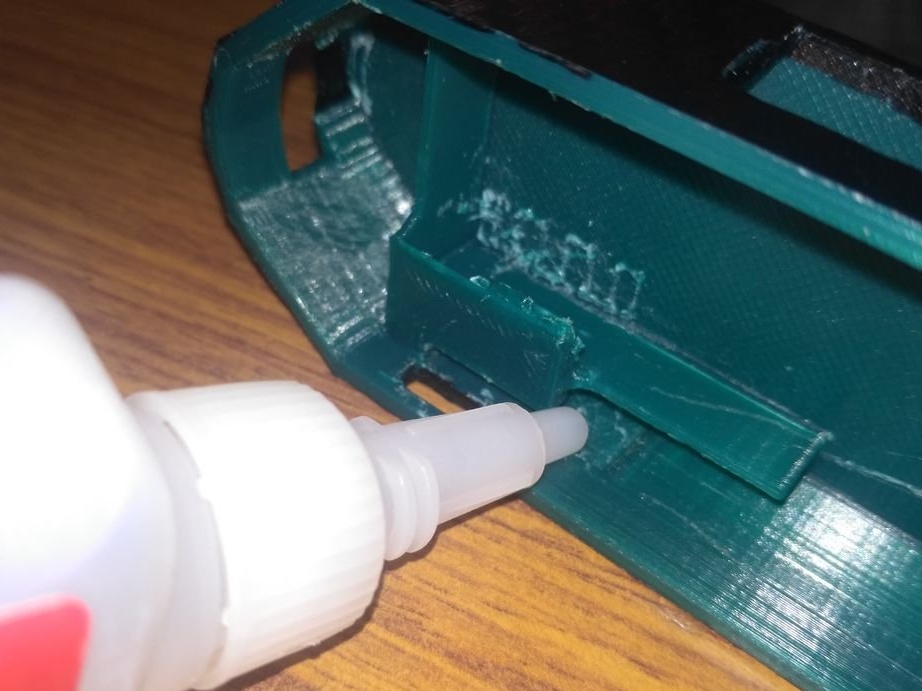
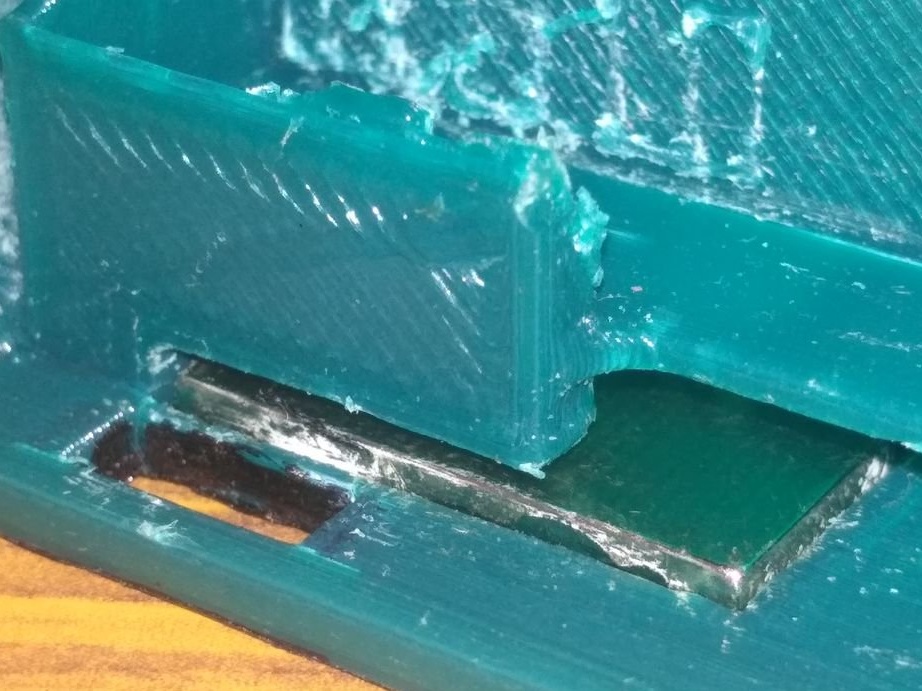
Troisième étape: aimant
Colle l'aimant sur le corps.

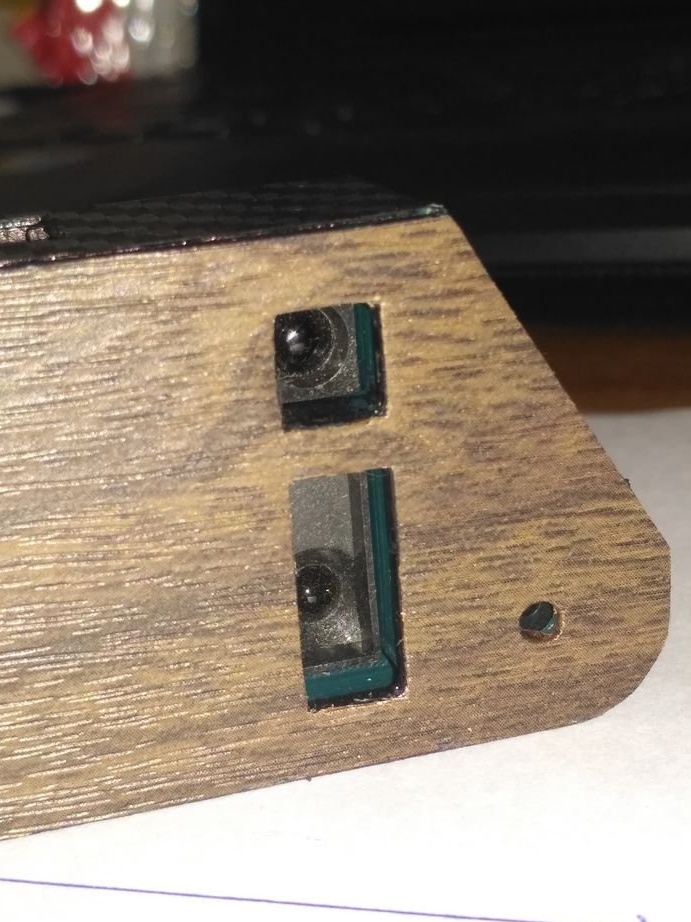
Quatrième étape: alignement du capteur
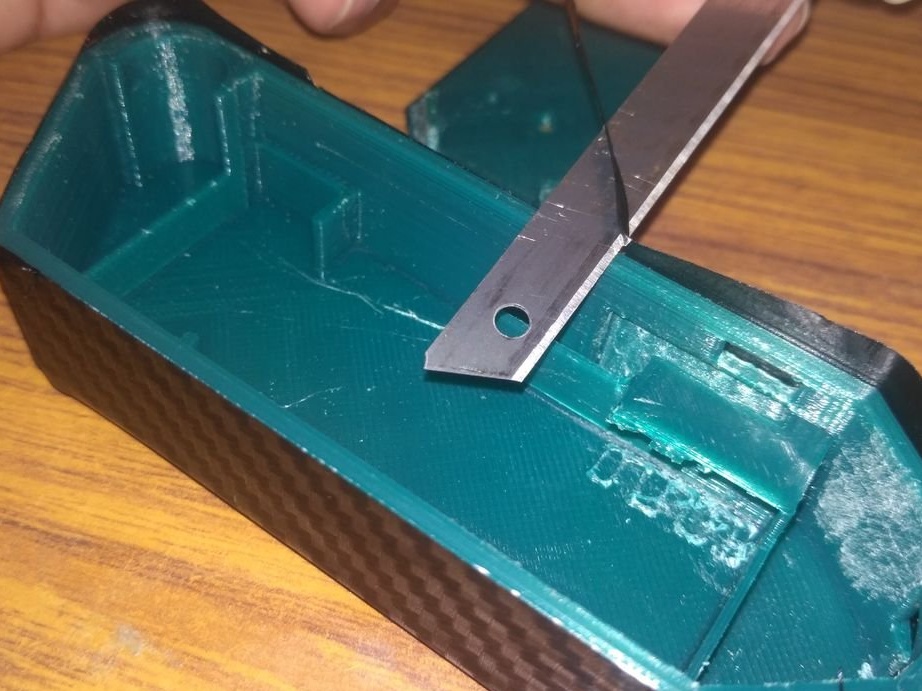
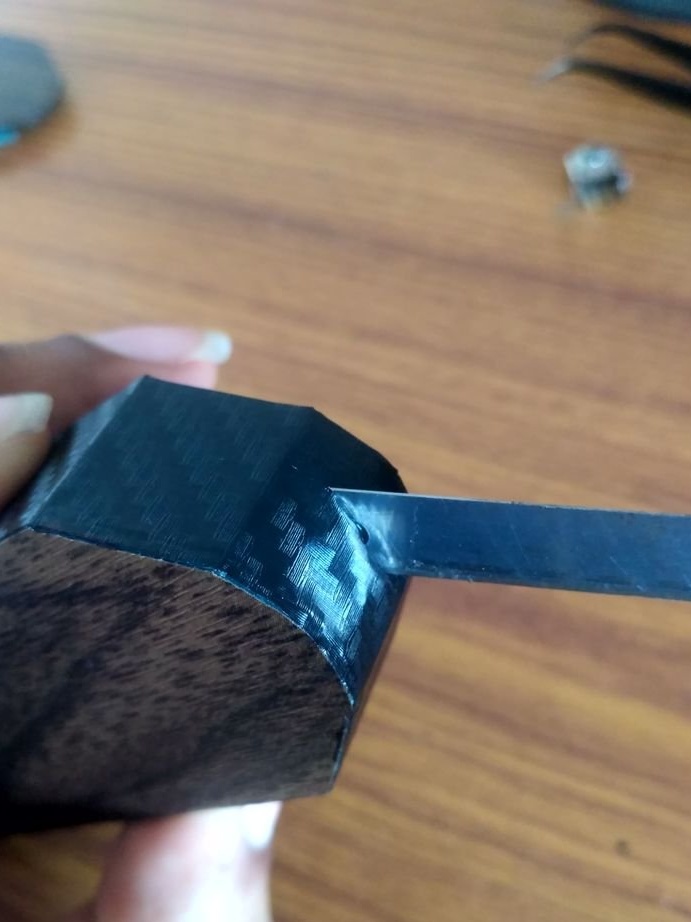
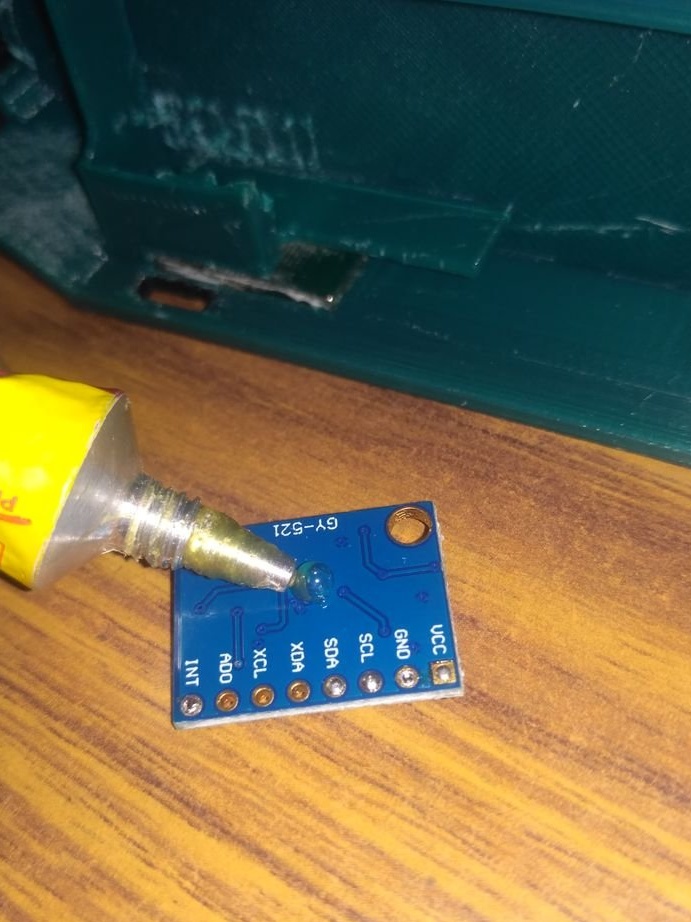
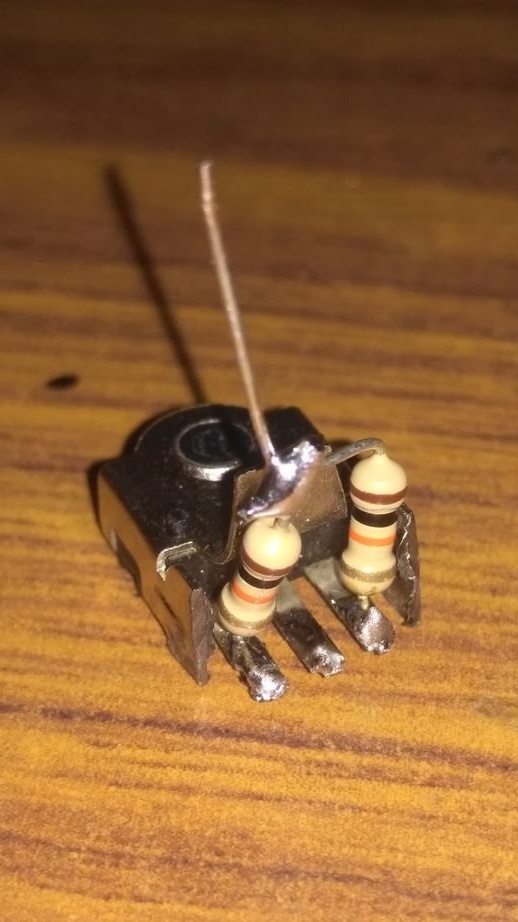
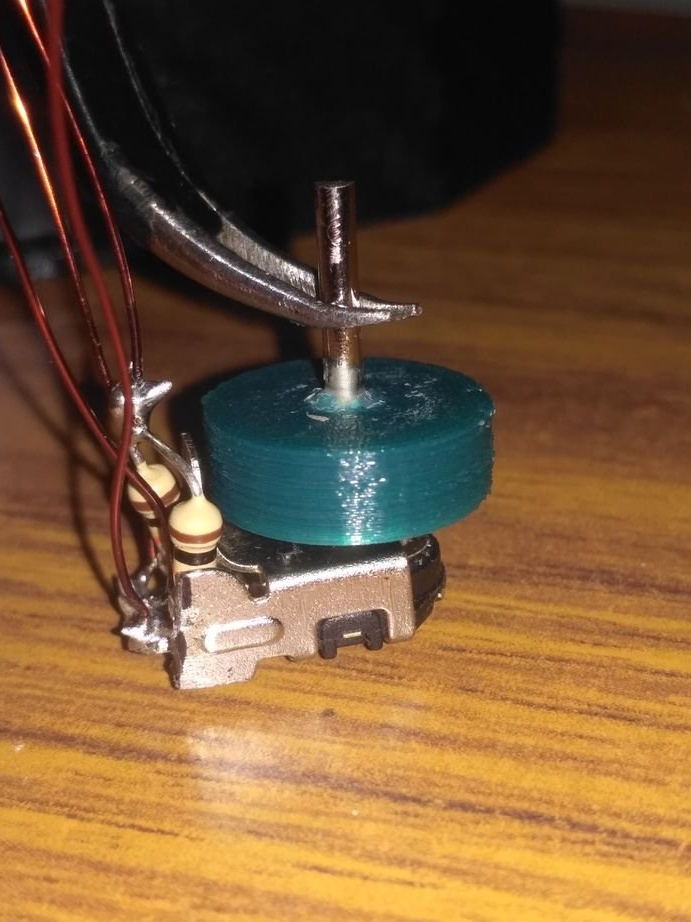
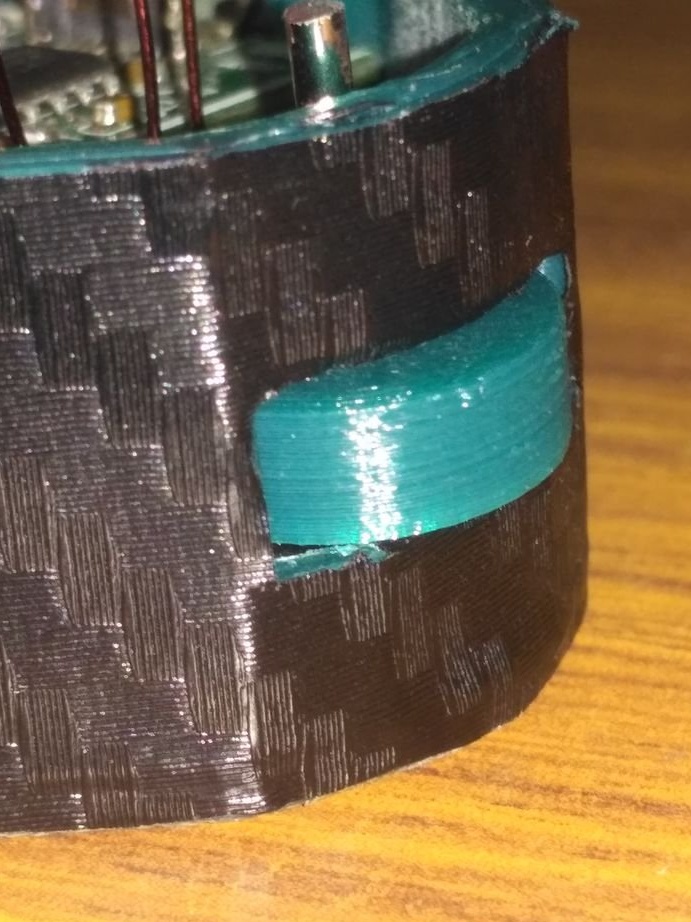
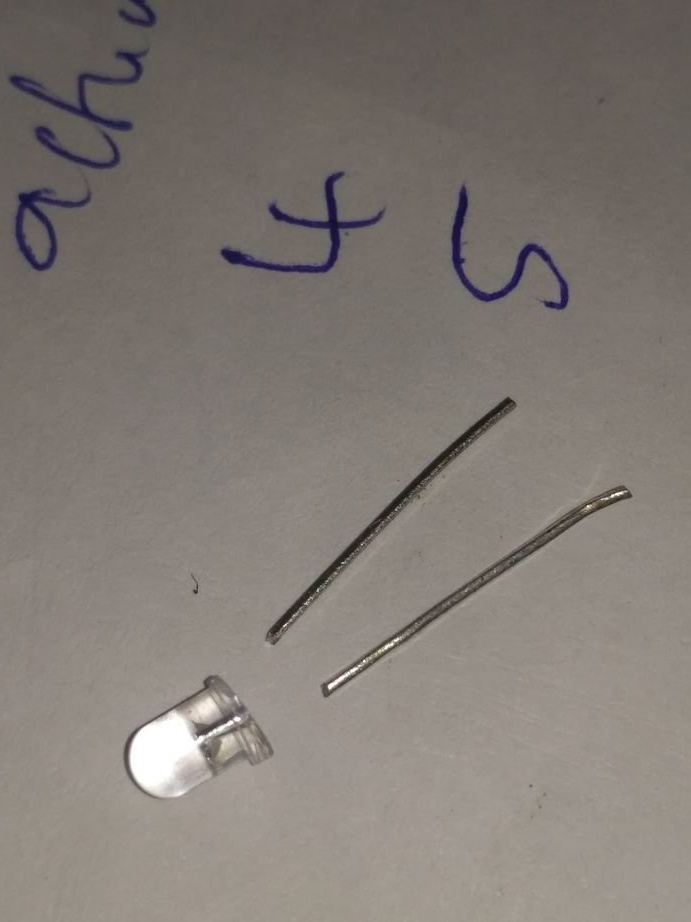
Pour réduire la taille, le capteur IR et l'encodeur sont coupés.






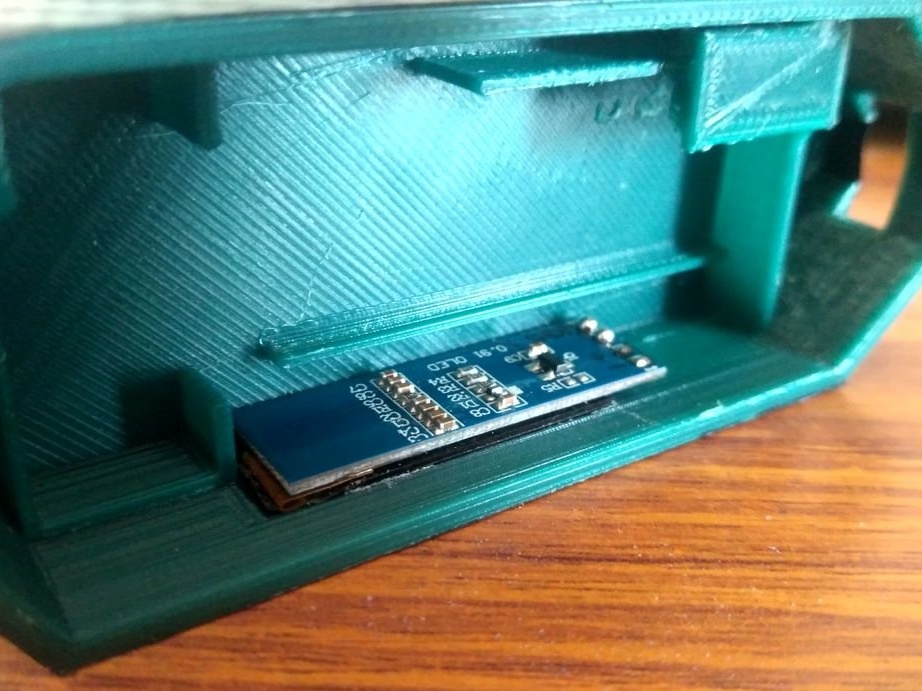
Cinquième étape: affichage
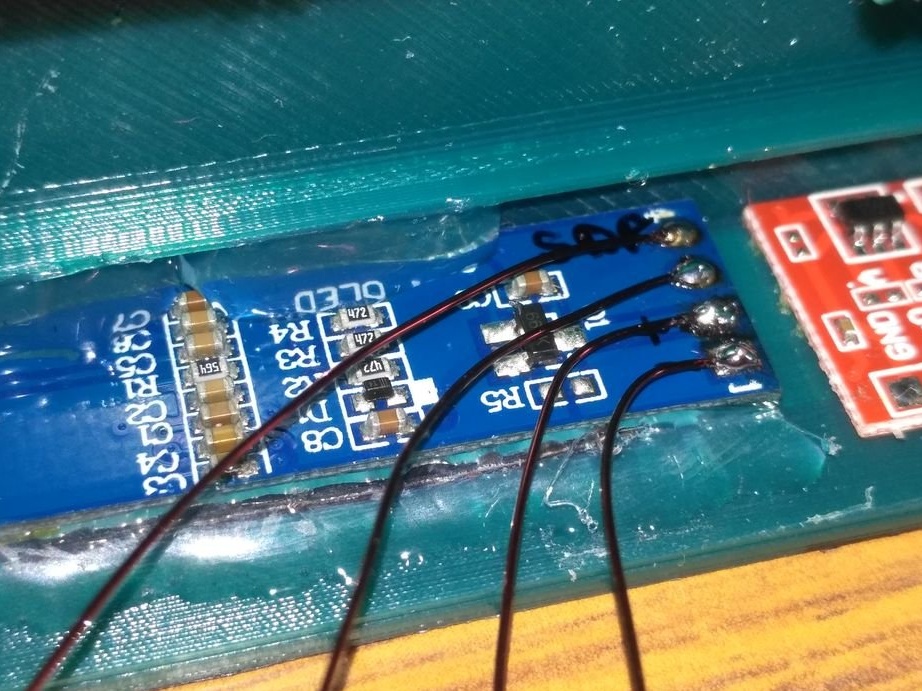
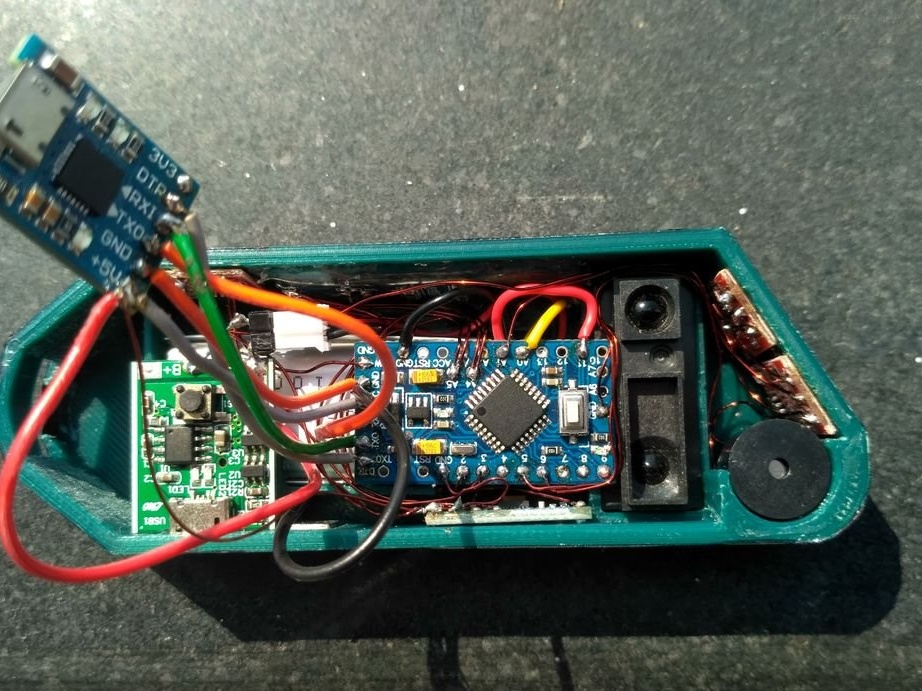
Marque les noms des contacts à l'arrière de l'écran OLED afin que vous puissiez ensuite établir les bonnes connexions Règle l'écran OLED sur la position correcte, comme illustré dans la deuxième figure. Fixe l'écran avec de la colle chaude.

Étape six: modules
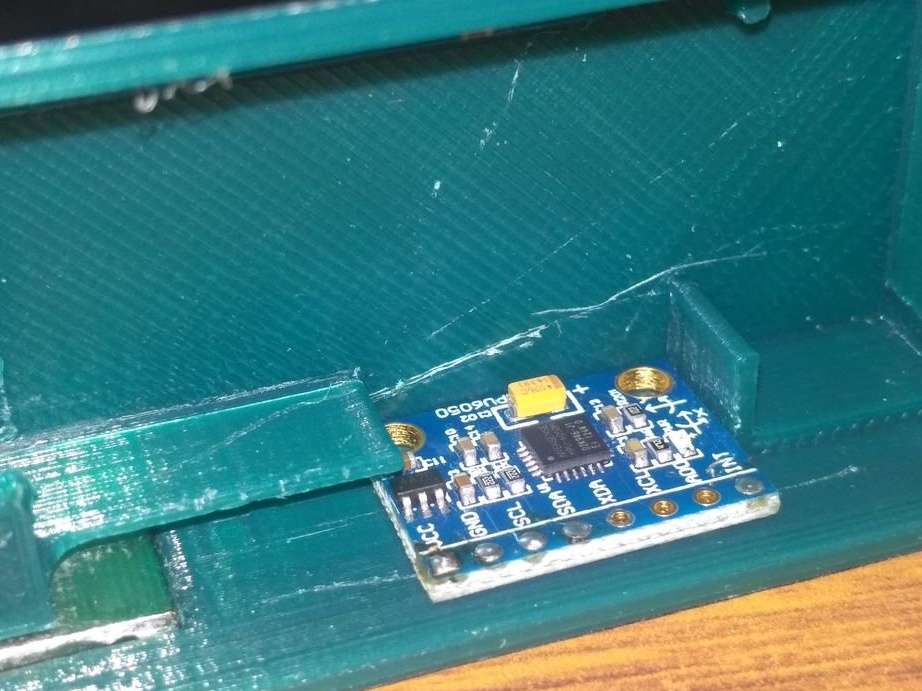
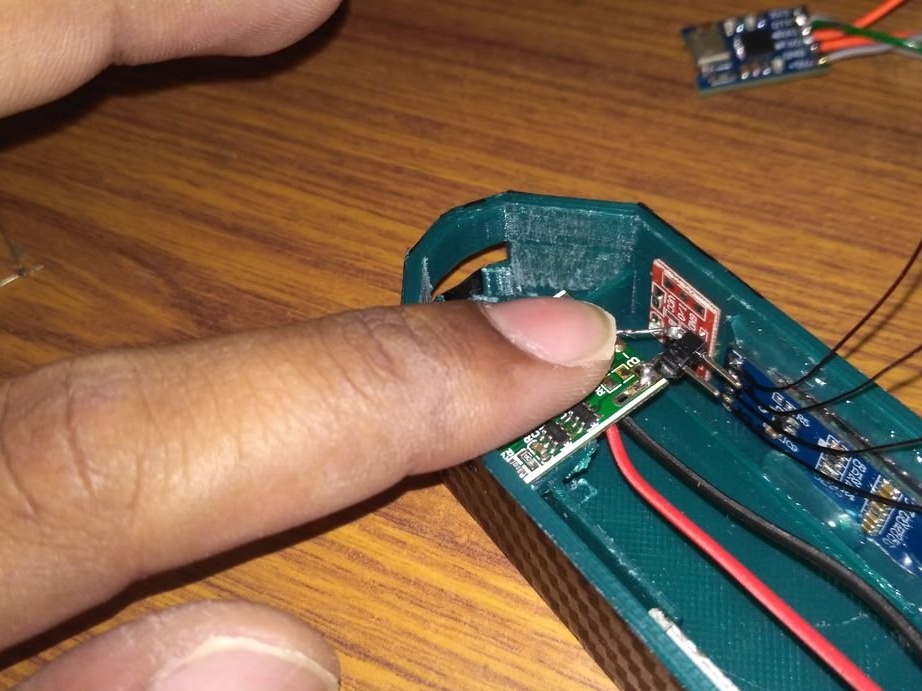
Colle le module capteur et le MPU6050.

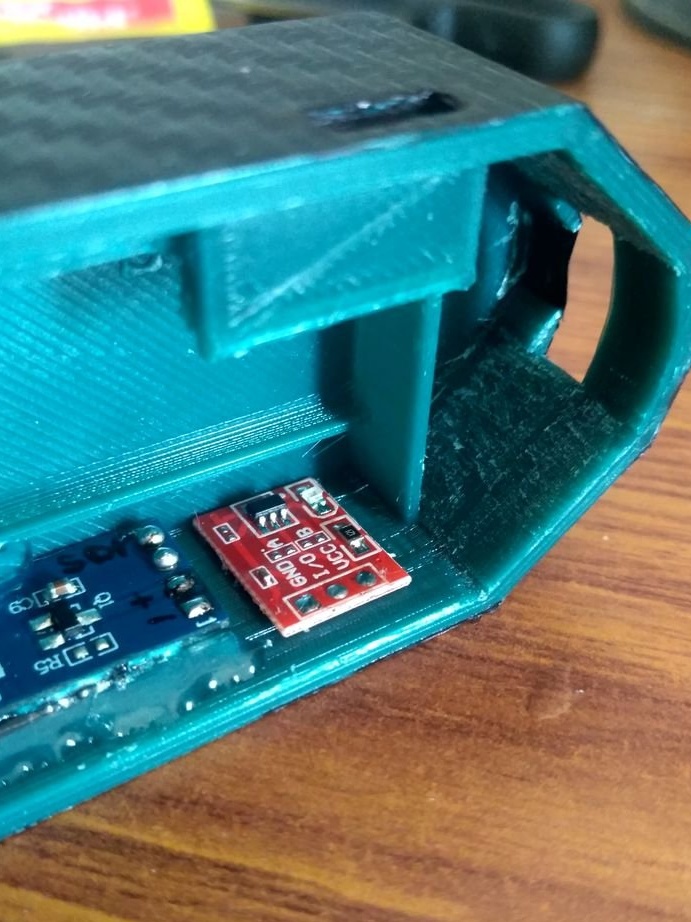

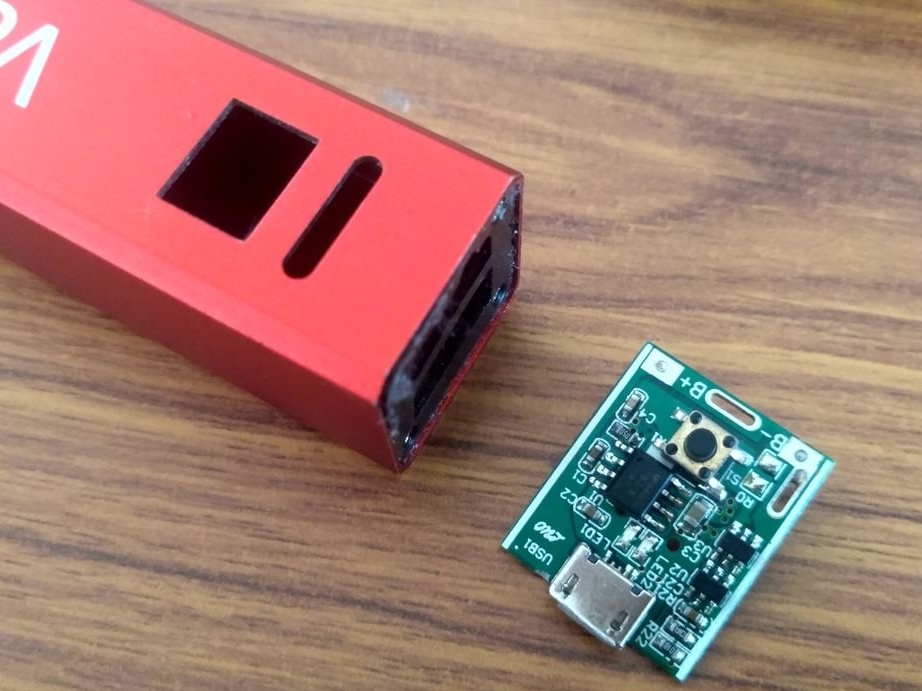
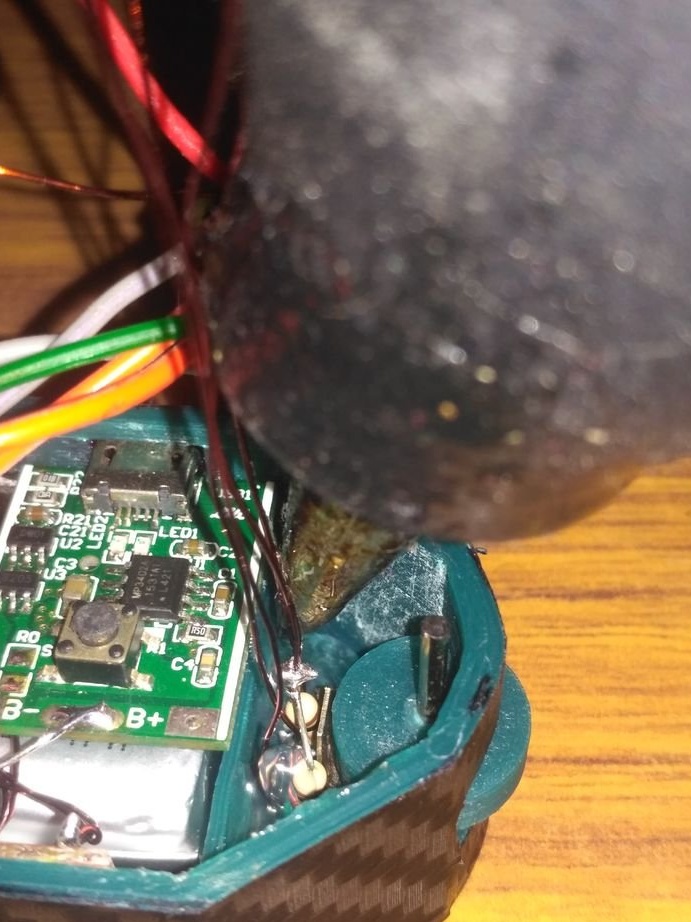
Septième étape: module de charge et batterie
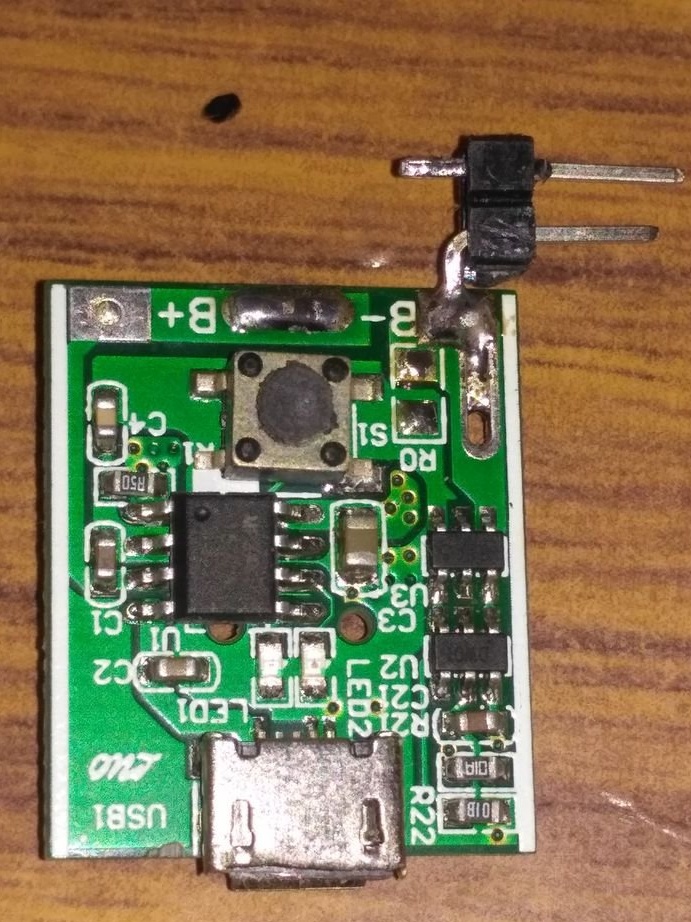
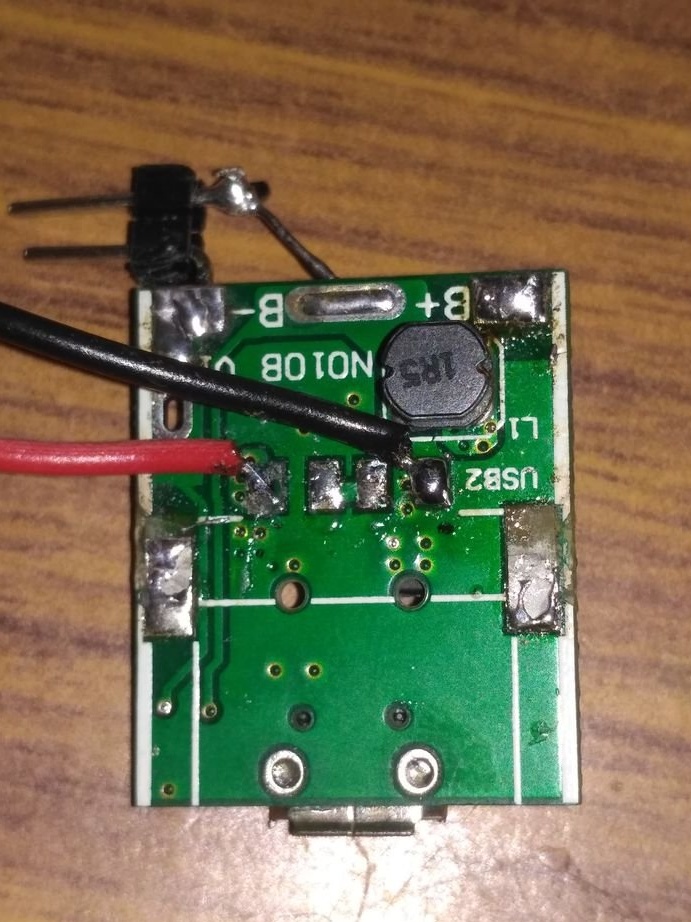
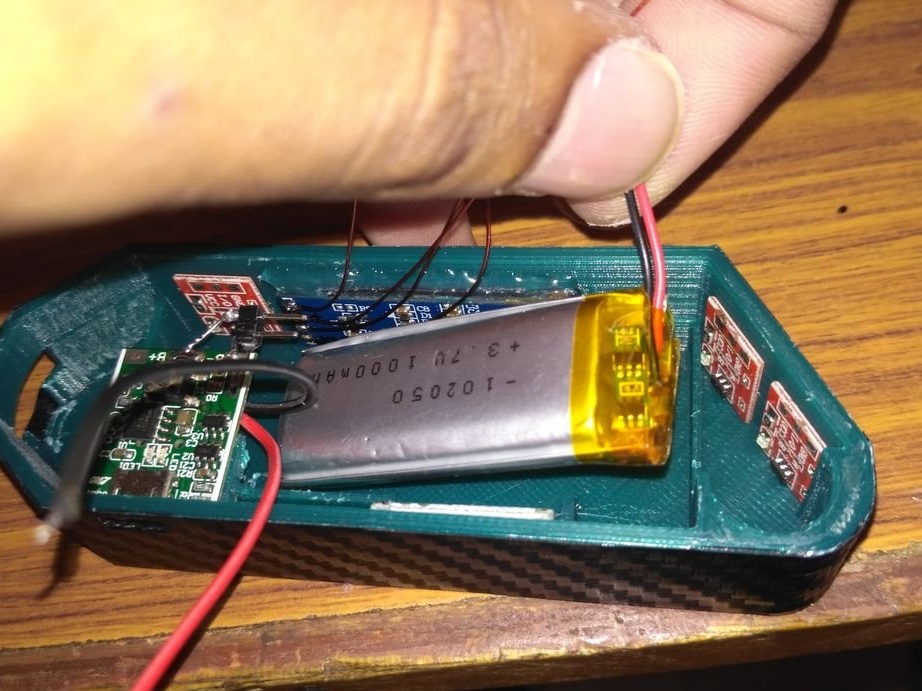
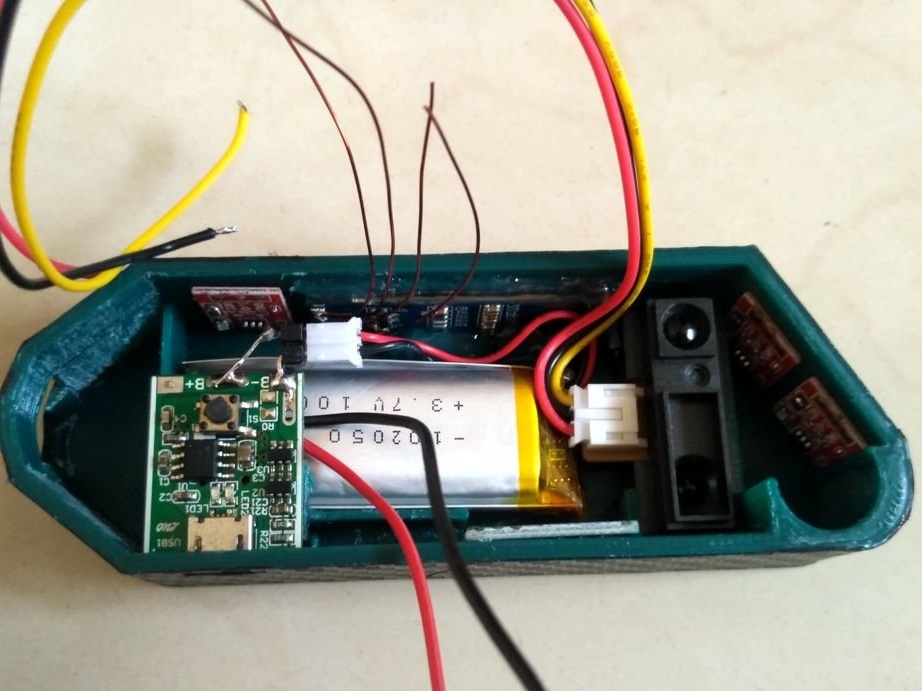
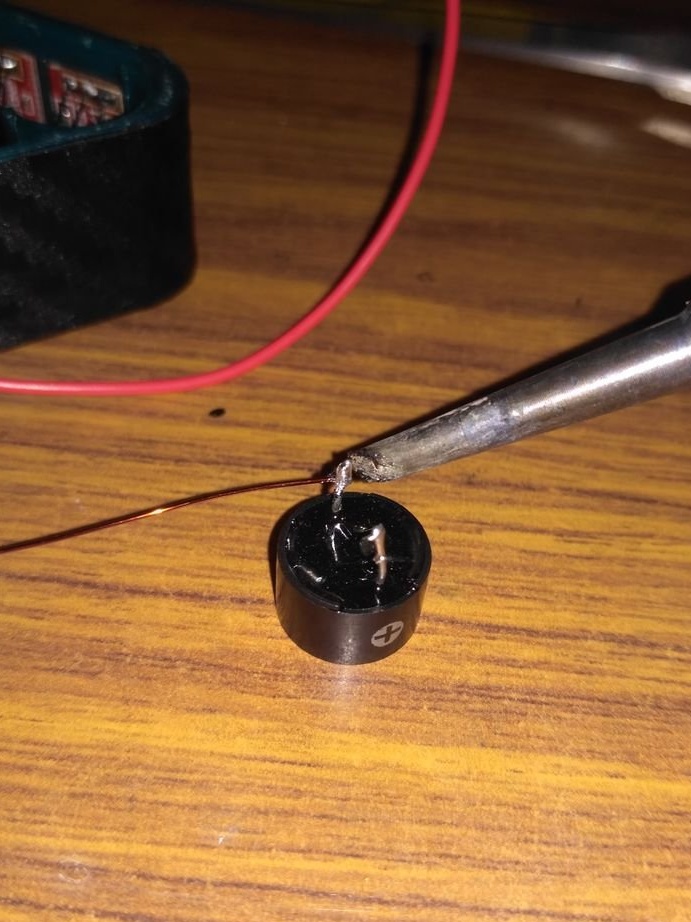
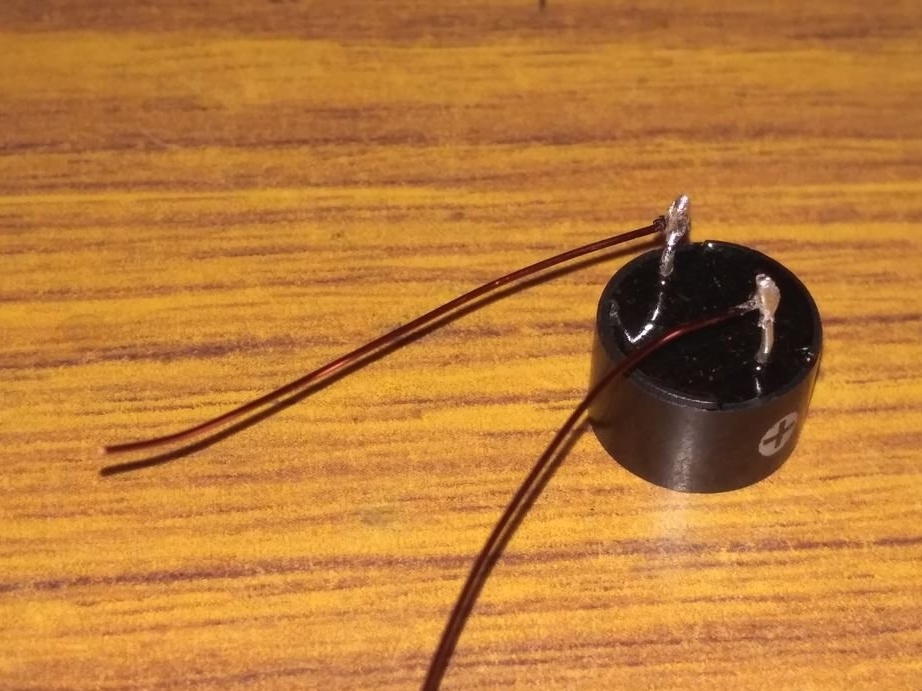
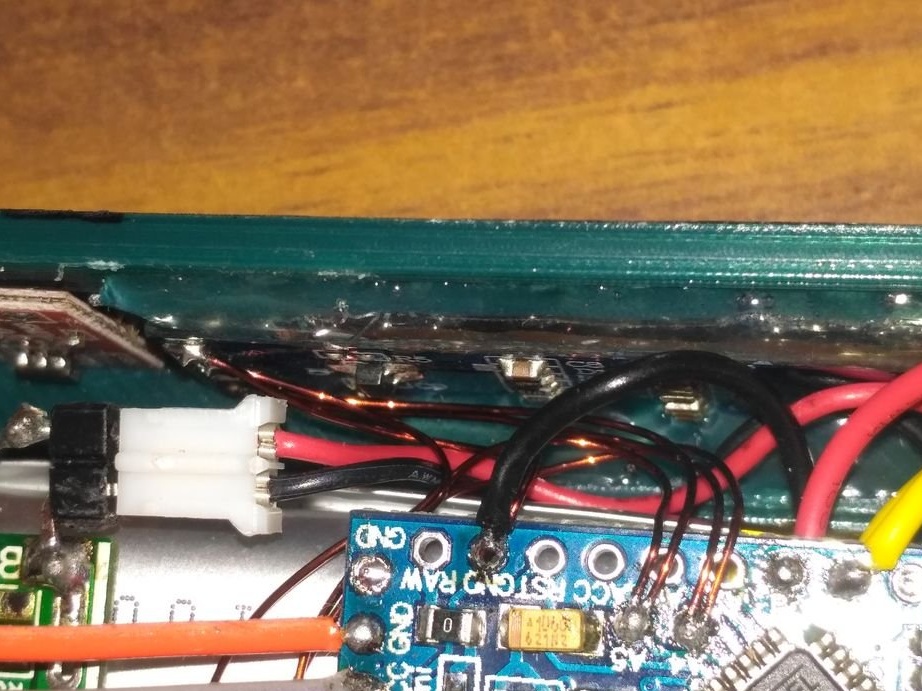
Ce module possède à la fois un circuit de protection de batterie et un convertisseur boost 5 V, 1 A. Il dispose également d'un bouton marche / arrêt qui peut être utilisé comme interrupteur d'alimentation. Le port de prise USB sur le module a été retiré à l'aide d'un fer à souder, et deux fils ont été soudés aux bornes + 5 V et à la terre, comme indiqué sur la 4ème photo.
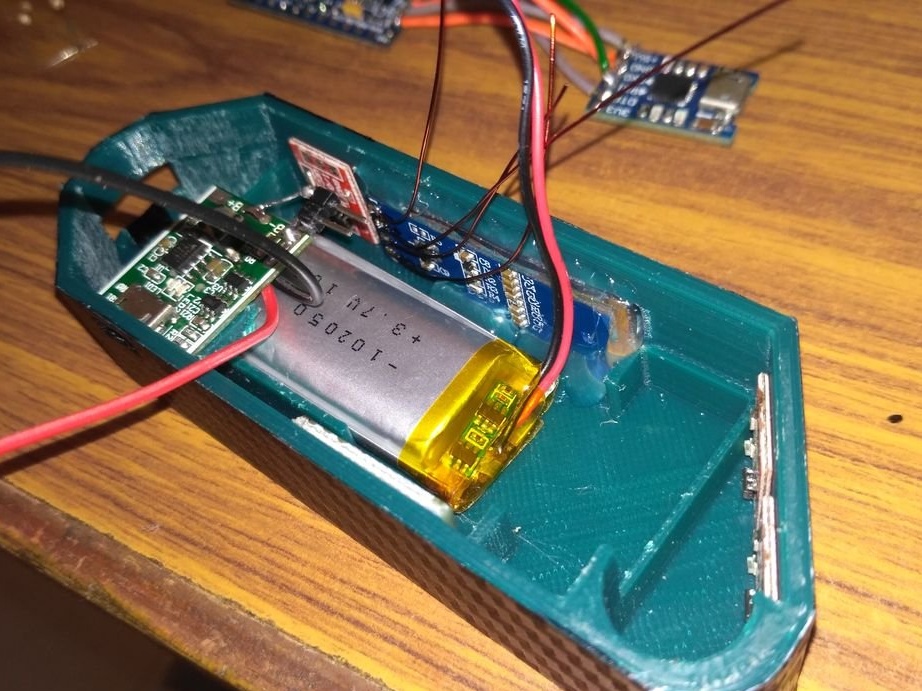
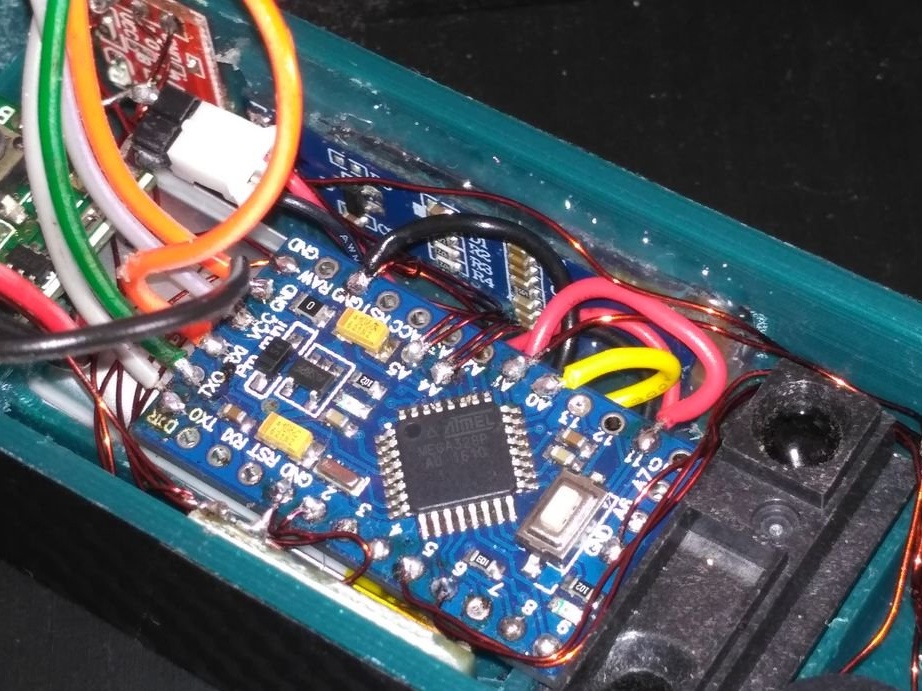
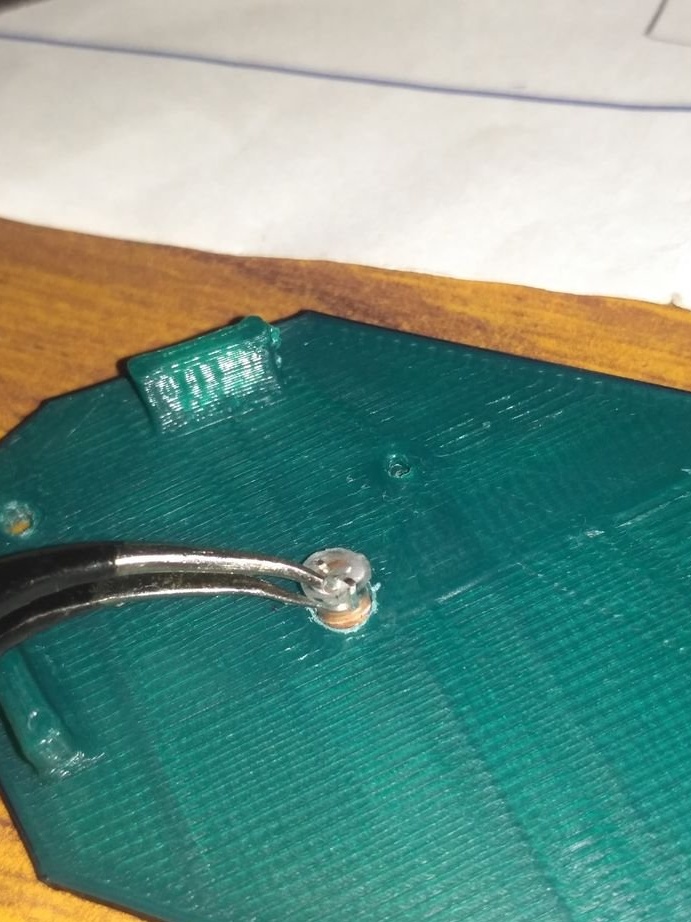
Ensuite, vous devez souder les 2 connecteurs à B + et B-, comme indiqué sur les deux premières photos, puis vérifier si le module fonctionne avec la batterie.
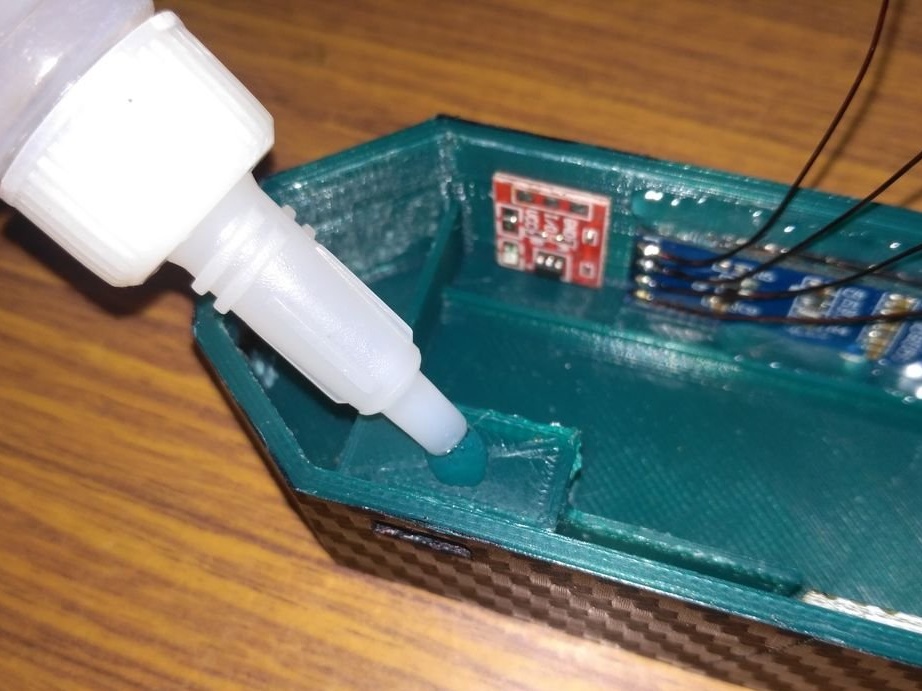
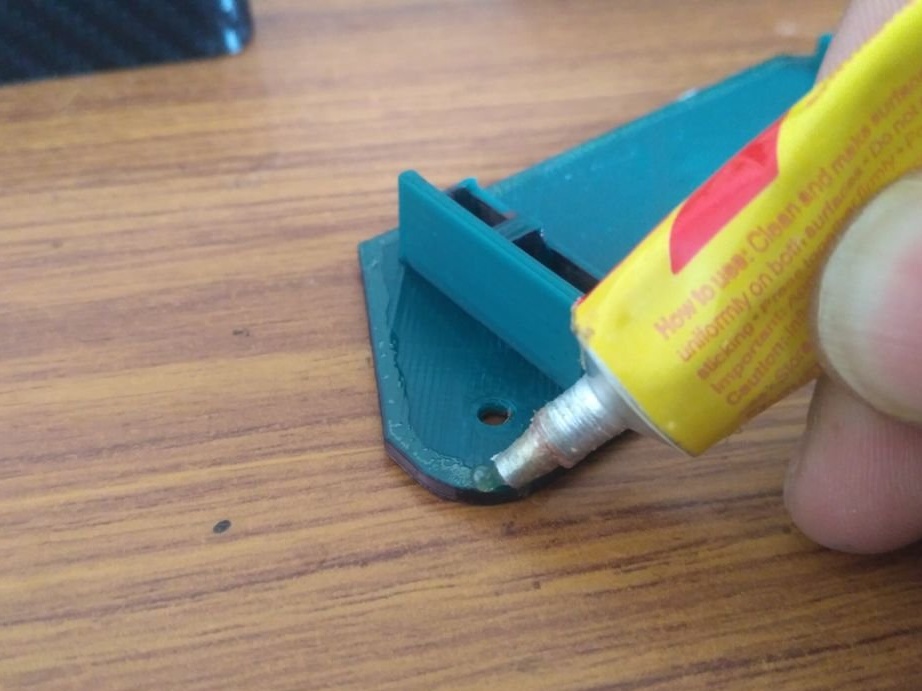
Maintenant, vous devez appliquer de la colle sur la plate-forme fournie pour le module et placer soigneusement le module, en vous assurant que le port de charge et le trou sont installés exactement dans les trous.

Étape huit: Installation de la batterie et du capteur infrarouge
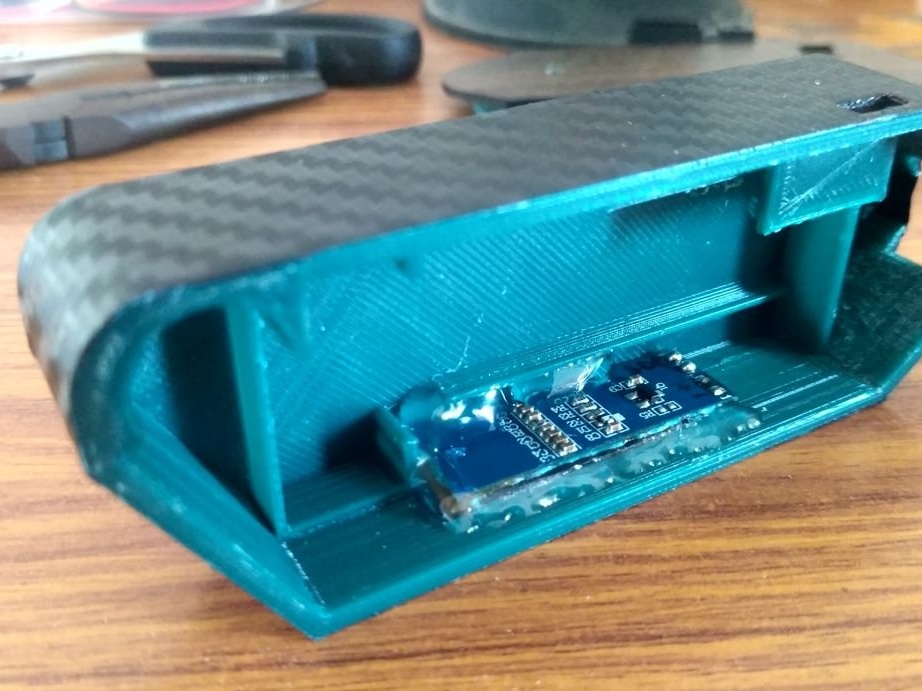
Souder les fils aux broches de l'écran. Installe la batterie et le capteur infrarouge.

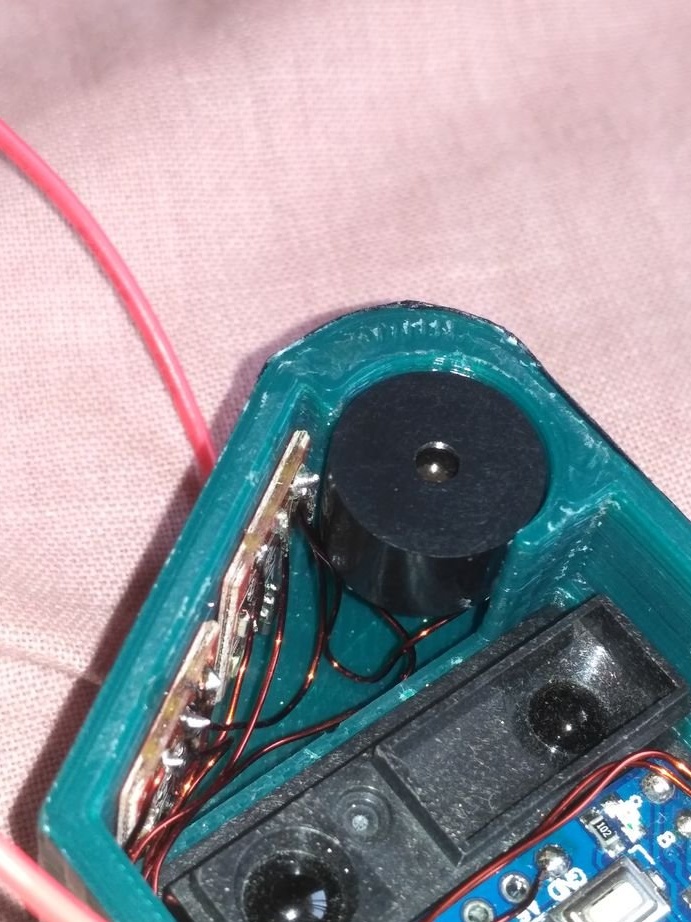
Étape neuf: Buzzer et module de charge
Selon le schéma, il monte le module de charge et le buzzer.

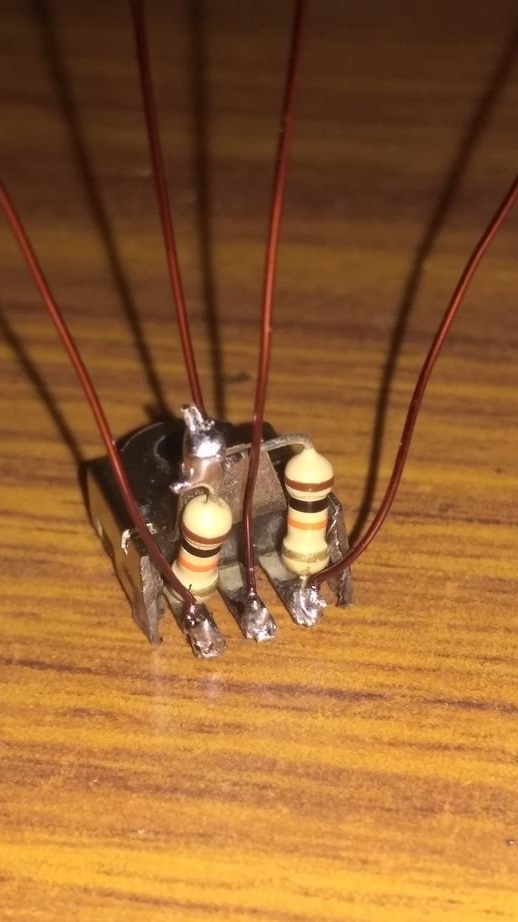
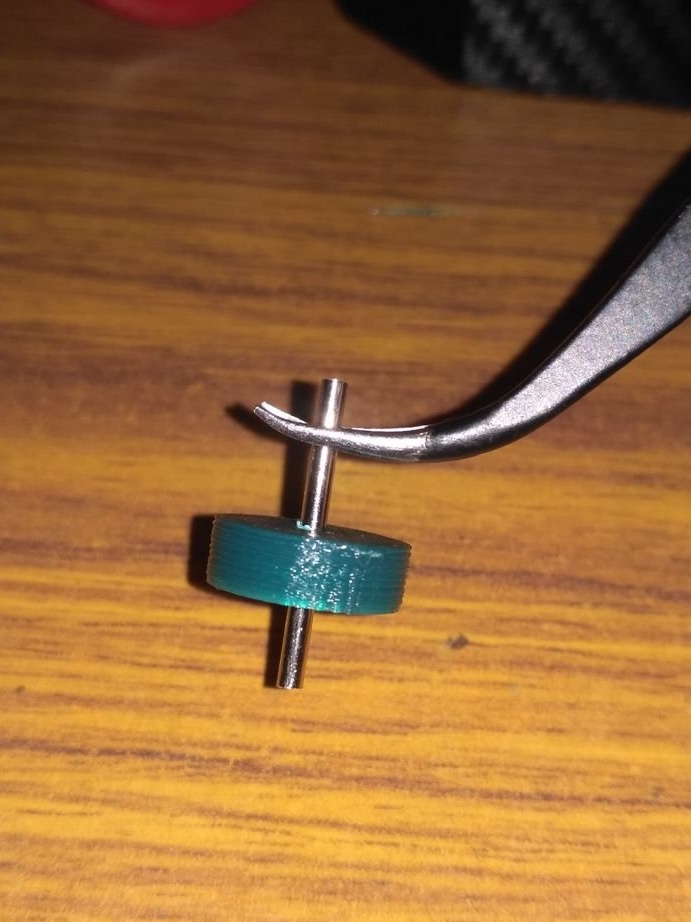
Étape dix: Encodeur
Selon le schéma monte l'encodeur. Insère l'axe en acier dans l'encodeur et la roue. Il utilise une super colle pour fixer l'essieu et la roue. Installe un encodeur avec une roue à l'intérieur du boîtier.




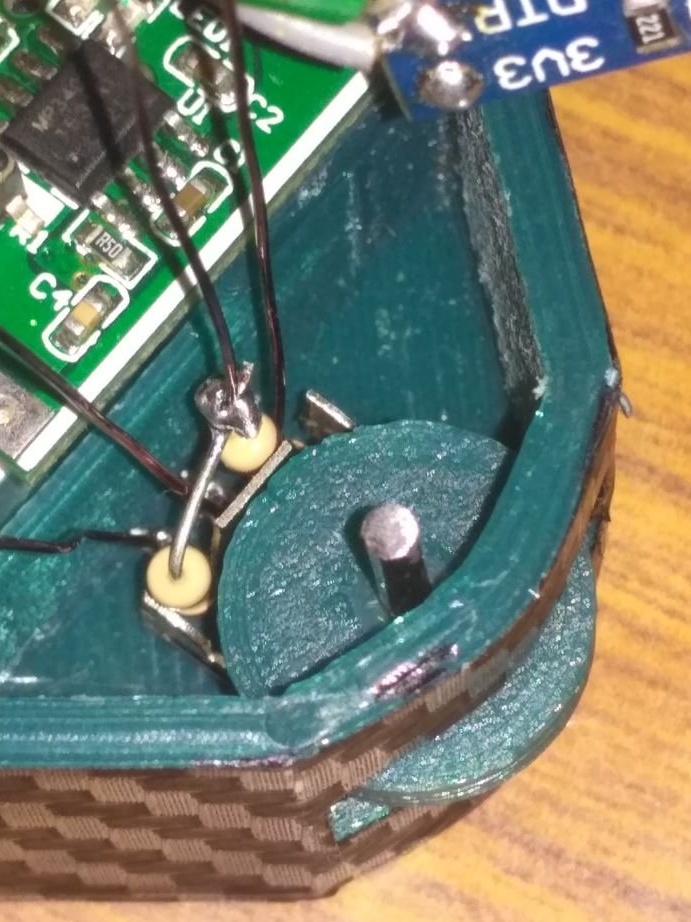
Étape onze: installation
Fixe les modules capteurs. Selon le circuit monte les fils. Lors de l'installation, il est nécessaire de s'assurer que les fils ne tombent pas sous la roue et ne couvrent pas la vue d'ensemble du capteur IR.


Étape douze: Télécharger le code
Charge du code et des bibliothèques.
final_code.ino
Adafruit_SSD1306-master.zip
Adafruit-GFX-Library-master.zip
SharpIR-master.zip

Étape 13: Étalonnage
Tout d'abord, le gyroscope est calibré. Étant donné que le module accéléromètre / gyroscope MPU6050 est simplement collé au corps, il peut ne pas être complètement plat. Par conséquent, pour corriger cette erreur, les étapes suivantes sont effectuées.
1. Connectez l'appareil à l'ordinateur et placez-le sur une surface plane.
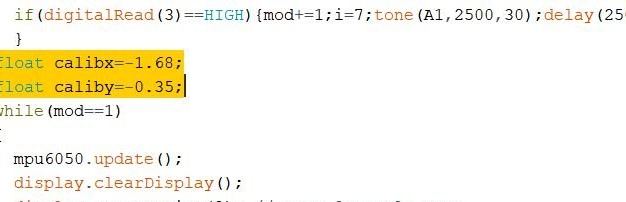
2. Passez en mode LEVEL sur l'appareil en appuyant sur le bouton «M» et notez les valeurs X et Y.
3: Attribuez ces valeurs aux variables «calibx» et «caliby» dans le code.
4: Téléchargez à nouveau le programme.



Calcule maintenant les distances par tour de roue.
Le nombre de pas par tour de l'arbre du codeur, N = 24 pas
Diamètre de roue, D = 12,7 mm
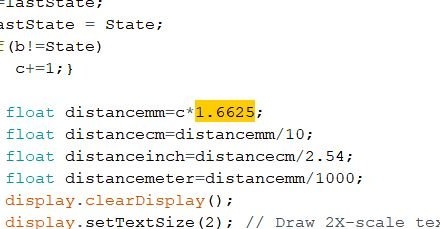
Circonférence de roue, C = 2 * pi * (D / 2) = 2 * 3,14 * 6,35 = 39,898 mm
Par conséquent, la distance parcourue par pas = C / N = 39,898 / 24 = 1,6625 mm.
Quatorzième étape: test
Avant d'installer le couvercle du boîtier, il teste les capteurs, le module de charge, les boutons, l'écran.



Étape 15: Assemblage du bouton et du boîtier
Le bouton d'alimentation sur la carte de charge est court et le maître, en coupant les jambes, définit une LED supplémentaire, qui appuiera sur le bouton.



Colle les deux moitiés du corps.





Étape seize: marquer les boutons
Les lettres ont été découpées sur un cutter laser puis collées sur le corps.




Tout est prêt, il ne reste plus qu'à tester l'appareil en fonctionnement.