
Cet article expliquera comment fais-le toi-même Vous pouvez fabriquer un appareil aussi intéressant que Levitron. En fait, un lévitron est une toupie ou un autre objet qui plane dans l'espace en raison de l'action d'un champ magnétique. Les lévitrons sont divers. Le modèle classique utilise un système d'aimants permanents et une toupie. Il plane au-dessus des aimants pendant la rotation en raison de la formation d'un coussin magnétique en dessous.
L'auteur a décidé d'améliorer un peu le système en construisant un lévitron basé sur Arduino utilisant des électroaimants. En utilisant ces méthodes, le sommet n'a pas à tourner pour planer dans l'air.
Un tel dispositif peut être utilisé pour divers autres fait maison. Par exemple, il peut être un excellent roulement, car il n'y a pratiquement aucune force de friction. En outre, sur un tel produit fait maison, vous pouvez mener diverses expériences, ou jouer à des amis.
Matériaux et outils de fabrication:
- microcontrôleur Arduino UNO;
- capteur Hall linéaire (le modèle UGN3503UA);
- vieux transformateurs (pour bobines d'enroulement);
- transistor à effet de champ, résistances, condensateurs et autres éléments (les valeurs nominales et les marques sont indiquées sur le diagramme);
- fils;
- fer à souder avec soudure;
- alimentation 12V;
- liège;
- un petit aimant néodyme;
- colle chaude;
- La base pour les bobines d'enroulement et les matériaux pour créer un corps fait maison.
Le processus de fabrication du lévitron:
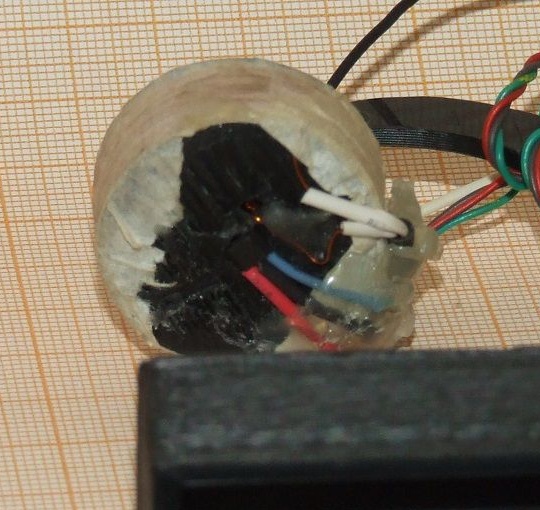
Première étape. Faire une bobine
La bobine sera un électroaimant, elle créera un champ magnétique qui attirera le haut. En haut, il y aura un bouchon sur lequel un aimant en néodyme est fixé. Au lieu du liège, vous pouvez utiliser d'autres matériaux, mais pas trop lourds.
Quant au nombre de tours dans la bobine, ici l'auteur n'a pas mentionné un tel chiffre, la bobine allait à l'oeil. En conséquence, sa résistance était d'environ 12 ohms, sa hauteur de 10 mm, son diamètre de 30 mm et l'épaisseur du fil utilisé devrait être de 0,3 mm. Il n'y a pas de noyau dans la bobine, si vous devez faire un sommet plus lourd, la bobine peut être équipée d'un noyau.
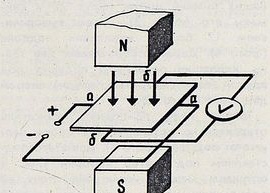
Deuxième étape Le rôle du capteur à effet Hall
Pour que le haut plane dans l'air, plutôt que de coller fermement au solénoïde, le système a besoin d'un capteur capable de mesurer la distance jusqu'au sommet. En tant que tel élément, un capteur Hall est utilisé. Ce capteur est capable de détecter le champ magnétique non seulement d'un aimant permanent, mais peut également déterminer la distance à tout objet métallique, car ces capteurs créent eux-mêmes un champ magnétique électrique.
Grâce à ce capteur, le haut reste toujours à la bonne distance du solénoïde.

Lorsque le haut commence à s'éloigner de la bobine, le système augmente la tension. Inversement, lorsque le sommet s'approche d'un solénoïde, le système abaisse la tension dans la bobine et le champ magnétique s'affaiblit.
Il y a trois sorties sur le capteur, c'est une alimentation 5V, ainsi qu'une sortie analogique. Ce dernier est connecté à l'ADC Arduino.
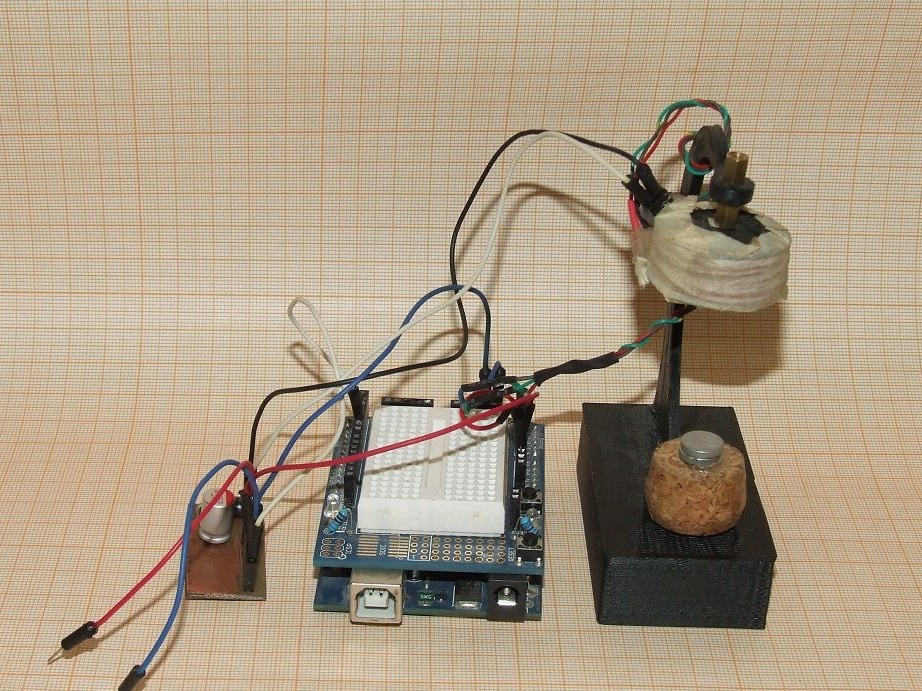
Troisième étape Nous assemblons le circuit et installons tous les éléments
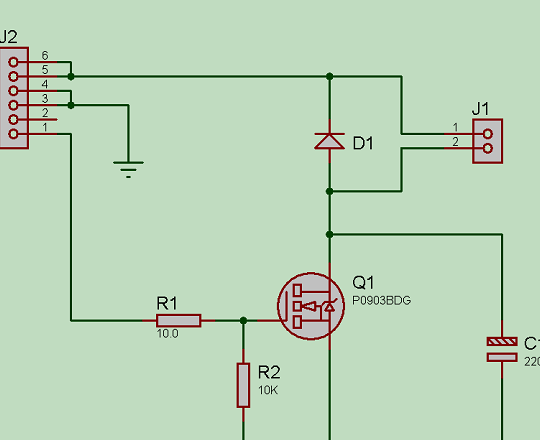
En tant que corps pour un travail fait maison, vous pouvez utiliser un morceau de bois, auquel vous devez faire un simple support pour fixer la bobine. Électronique le schéma est assez simple, tout peut être compris à partir de l'image. L'électronique fonctionne à partir d'une source 12V, et puisque le capteur a besoin de 5V, il est connecté via un stabilisateur spécial, qui est déjà intégré au contrôleur Arduino. L'appareil maximal consomme environ un ampère. Lorsque le haut s'envole, la consommation actuelle est de l'ordre de 0,3-0,4 A.
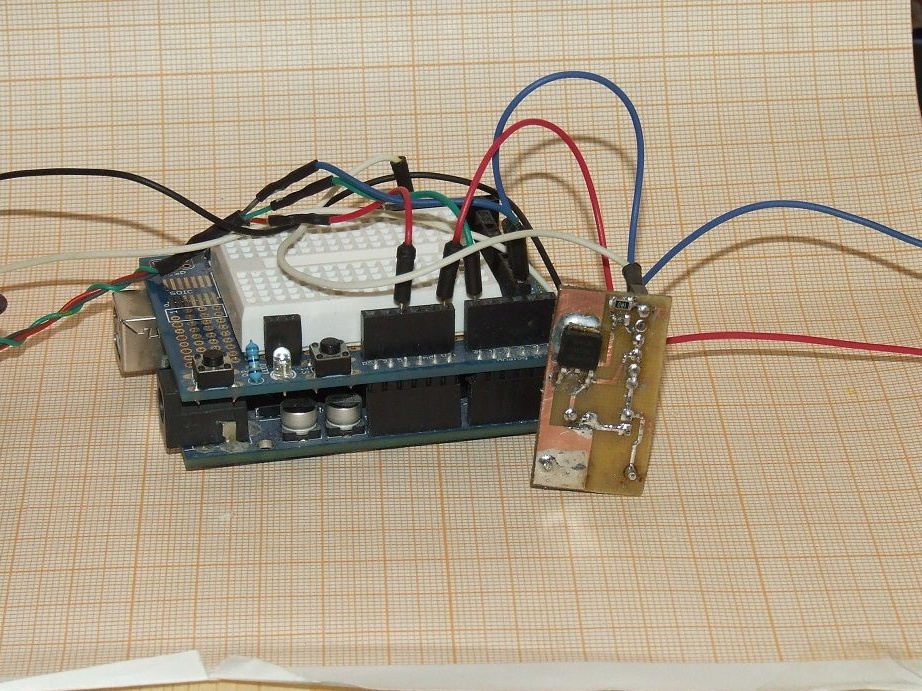
Un transistor à effet de champ est utilisé pour contrôler le solénoïde. Le solénoïde lui-même est connecté aux sorties de J1, et le premier contact du connecteur J2 doit être connecté au PWM Arduino. Le schéma ne montre pas comment connecter le capteur Hall à l'ADC, mais cela ne devrait pas poser de problème.
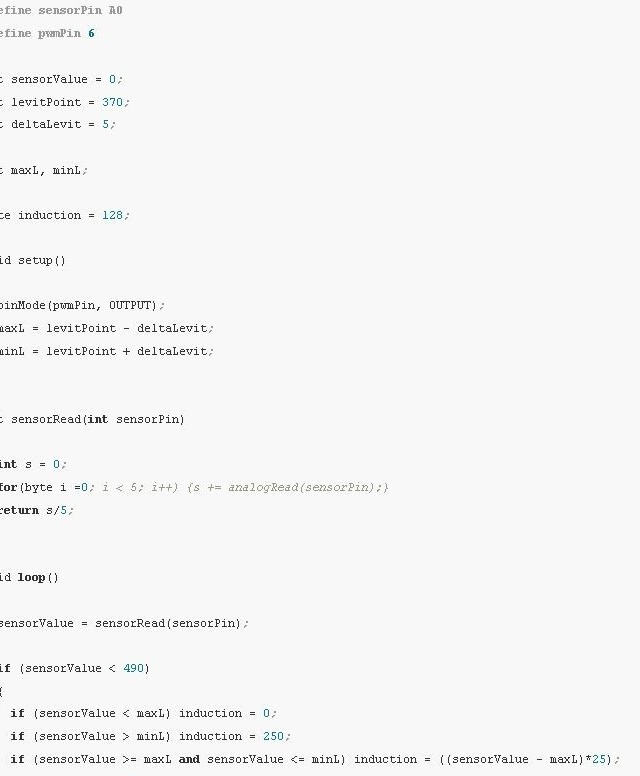
Quatrième étape Micrologiciel du contrôleur
Pour programmer le contrôleur pour les actions nécessaires, un micrologiciel est requis. Le programme fonctionne très simplement. Lorsque les valeurs commencent à tomber en dehors de la plage autorisée, le système augmente le courant au maximum ou s'arrête complètement. Dans les versions ultérieures du firmware, il est devenu possible d'ajuster en douceur la tension sur la bobine, de sorte que les fortes fluctuations du sommet se sont arrêtées.
C'est tout, le produit fait maison est prêt. Au premier démarrage, l'appareil a fonctionné, mais certains défauts ont été découverts. Ainsi, par exemple, lorsque vous travaillez pendant plus d'une minute, la bobine et le transistor commencent à devenir très chauds. À cet égard, à l'avenir, vous devrez installer un radiateur sur le transistor ou en mettre un plus puissant. La bobine devra également être refaite, avec une conception plus fiable que de simples bobines de fil avec de la colle chaude.
Afin de protéger la source d'alimentation, de grands condensateurs doivent être fournis aux circuits d'entrée. Le premier bloc d'alimentation de 1,5 A de l'auteur a grillé après 10 secondes en raison de fortes surtensions.
À l'avenir, il est prévu de transférer l'ensemble du système vers une alimentation 5V.