

La création du projet a débuté en février 2015. D'abord le robot la ligne de "Antei" était "Domovenok" - une brosse robot. Plus tard est apparu "Antei 1".
La plateforme Anteya est un boîtier équipé d'un contrôleur Arduino Uno, capteurs et instruments pour diverses fonctions. Antei peut aussi devenir aspirateur, moissonneuse-batteuse, robot gardien, etc.
Mais la principale caractéristique d'Antey est le détachement des "fourmis" qui déplacent Antey.
Le principe de fonctionnement de notre complexe a été repris de la nature elle-même. Chaque soi-disant fourmi peut se déplacer de manière indépendante, mais peut également effectuer un travail collectif. En même temps, ils sont capables non seulement de soulever une charge beaucoup plus lourde que leur poids, mais peuvent également déplacer ensemble des charges incroyablement grandes pour eux.
Chacune de nos fourmis est équipée d'un moteur vibrant. Il s'agit d'une forme de propulsion assez inexplorée. Ses avantages sont évidents. Tout d'abord, ce type de propulsion est plus économique en consommation d'énergie. Deuxièmement, il est compact contrairement à d'autres types de moteurs, mais il offre des performances décentes.
Nous avons découvert que chaque "fourmi" pesait 8 grammes. peut faire glisser 89g., ce qui indique qu'il est capable de porter son poids 11 fois le sien.
Depuis la création d'Antei, il y a eu une question sur le nombre de moteurs à vibration, comment ils sont situés sur la plate-forme du robot et à partir de quoi les jambes des fourmis (une brosse à dents ou des jambes en caoutchouc) devraient être fabriquées. De nombreuses options ont été essayées.
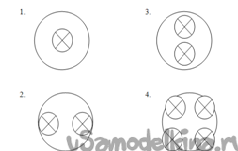
Mais il a été décidé de créer 2 rangées de 3-4 fourmis sur pattes en caoutchouc de chaque côté de la plate-forme, alors qu'ils doivent être dans un accouplement rigide les uns avec les autres.
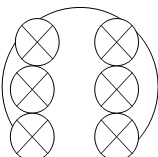
Dans ce mode de réalisation, un mouvement vers l'avant confiant est obtenu, et lorsque certains moteurs sont éteints, un virage latéral est effectué.


Notre Antey
