


Commençons donc. Vous devez d'abord décider des composants et des circuits. Le principe de fonctionnement du circuit est simple: un signal faible provenant du microphone est amplifié et envoyé à la broche analogique Arduino. En tant qu'amplificateur, j'utiliserai un amplificateur opérationnel (comparateur). Il offre un gain beaucoup plus élevé qu'un transistor conventionnel. Dans mon cas, la puce LM358 servira de comparateur, on peut la trouver littéralement n'importe où. Et cela coûte assez bon marché.
Si vous ne pouviez pas trouver le LM358, vous pouvez mettre à sa place tout autre amplificateur opérationnel approprié. Par exemple, le comparateur montré sur la photo se trouvait sur la carte d'amplification du signal du récepteur infrarouge du téléviseur.

Regardons maintenant le circuit du capteur.
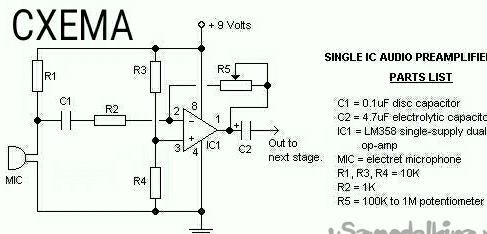
En plus de l'amplificateur opérationnel, nous aurons besoin de quelques composants plus facilement accessibles.
Le microphone le plus ordinaire. Si la polarité du microphone n'est pas indiquée, il suffit de regarder ses contacts. Le moins va toujours au boîtier, et dans le circuit, en conséquence, il est connecté à la "masse".

Ensuite, nous avons besoin d'une résistance de 1 kΩ.
Trois résistances de 10 kΩ.

Et une autre résistance de 100 kΩ fait 1 MΩ.
Dans mon cas, une résistance de 620 kOhm est utilisée comme «moyenne d'or».
Mais idéalement, vous devez utiliser une résistance variable de la valeur appropriée. De plus, comme le montrent les expériences, une note plus élevée n'augmente que la sensibilité de l'appareil, mais plus de «bruit» apparaît.

Le composant suivant est un condensateur de 0,1 uF. Il est étiqueté "104".

Et un autre condensateur, à 4,7 uF.
Nous passons maintenant à l'assemblage. J'ai assemblé le circuit avec une installation montée.

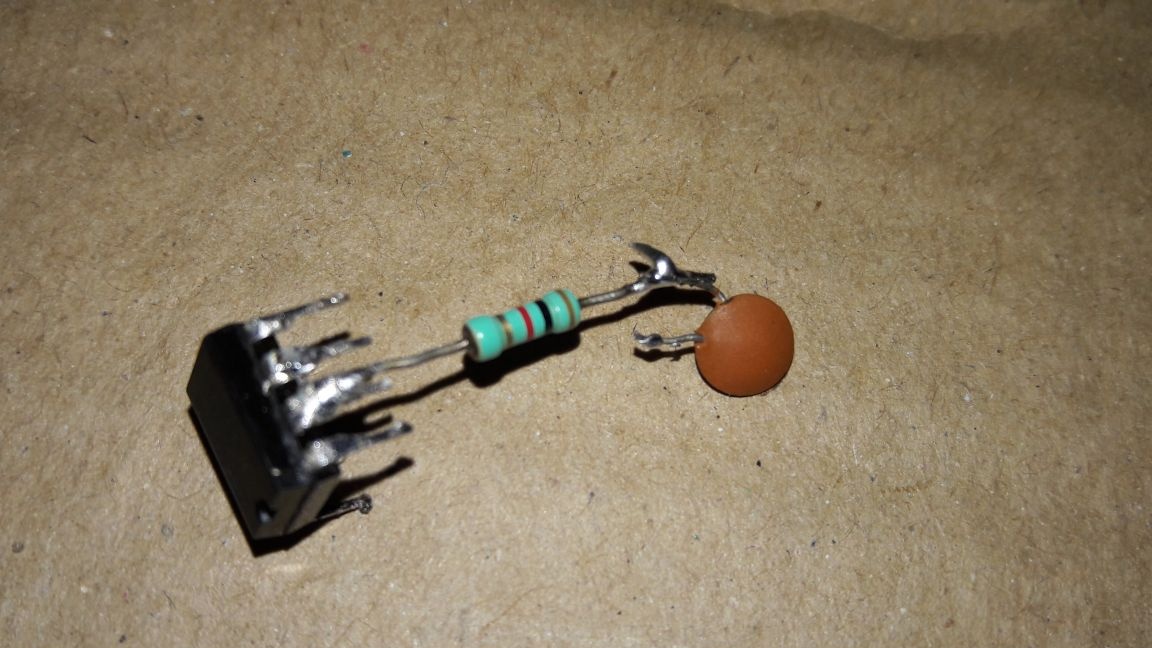
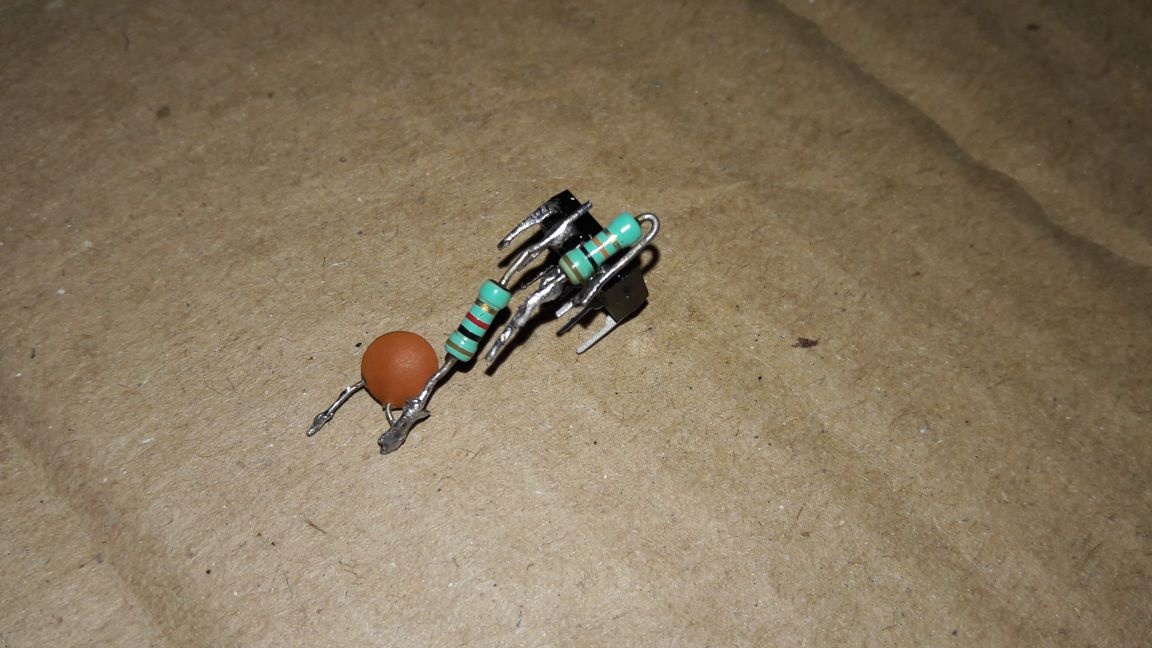







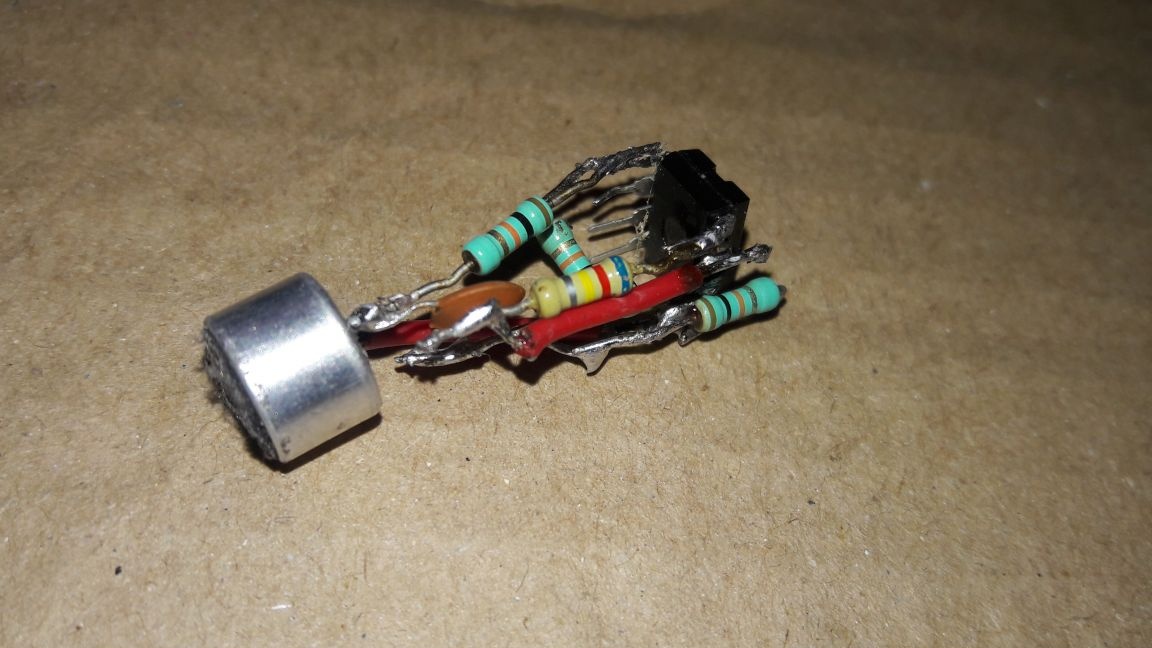

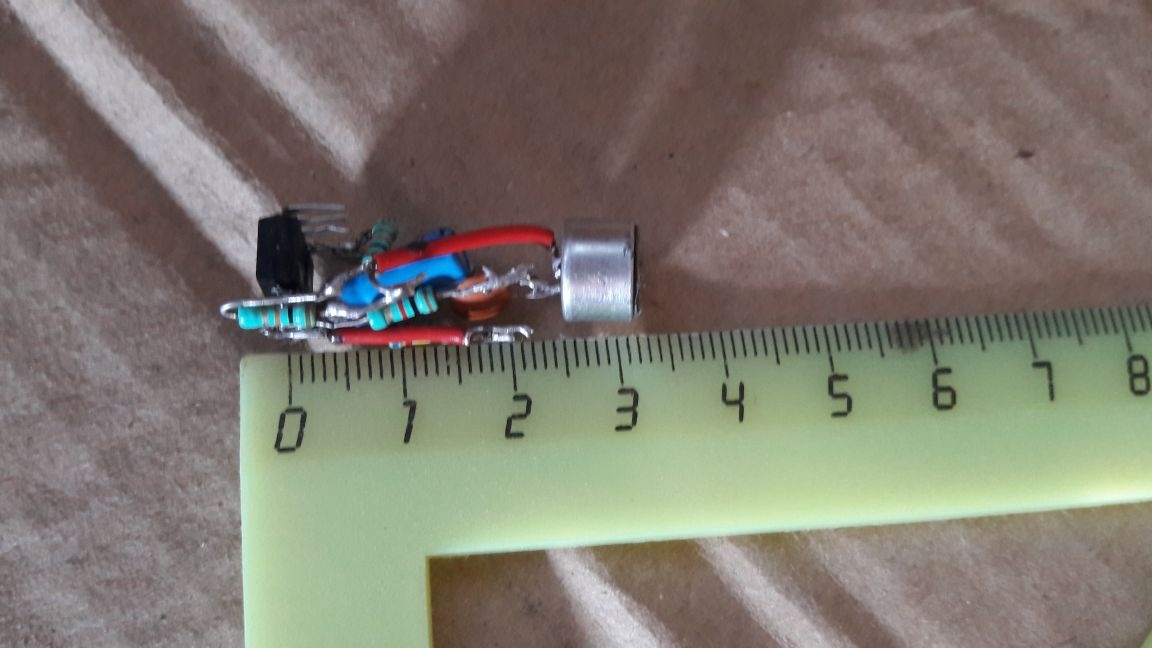
Assemblage terminé.J'ai installé le circuit dans un boîtier que j'ai fabriqué à partir d'un petit morceau de tube en plastique.
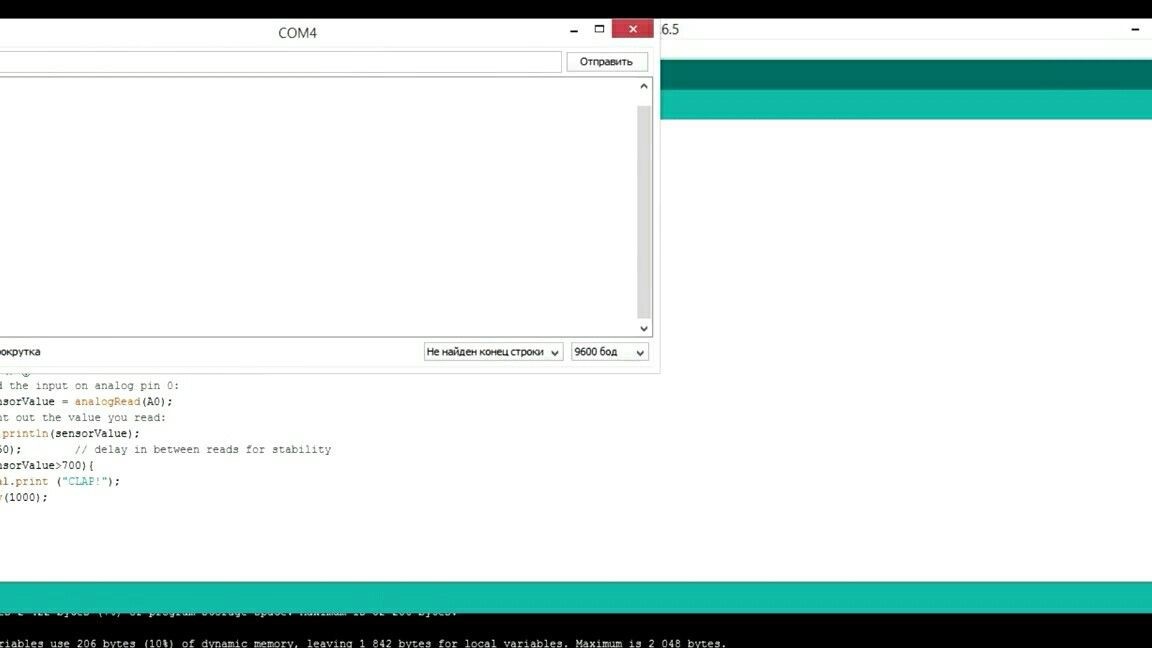
Nous procédons au test de l'appareil. Je vais le connecter au tableau Arduino UNO. Nous entrons dans l'environnement de développement Arduino et ouvrons l'exemple AnalogReadSerial dans la section Basics.
void setup () {
Serial.begin (9600); // connectez la connexion série à 9600 bauds
}
boucle vide () {
int sensorValue = analogRead (A0); / * lire la valeur de la broche analogique zéro et l'enregistrer dans la variable sensorValue * /
Serial.println (sensorValue); // affiche la valeur sur le port
retard (1); // attend une milliseconde pour la stabilisation
}Avant de charger dans la carte, nous modifions le délai de 50 millisecondes et le chargeons. Après cela, nous faisons un coton test et suivons les indications. Au moment du clap, ils sautent, tentent de se souvenir de cette valeur approximativement et reviennent au croquis.
Ajoutez quelques lignes à l'esquisse.
if (sensorValue> X) {
Serial.print ("CLAP");
retard (1000);
}Au lieu de «X», insérez la même valeur, chargez et applaudissez à nouveau. Continuez donc jusqu'à ce que vous trouviez la valeur de réponse optimale. Avec une valeur surestimée, la condition ne sera remplie qu'avec du coton à une distance très proche. Avec une valeur inférieure, la condition sera satisfaite au moindre bruit ou au bruit des pas.
De plus, avec la sélection correcte de la résistance R5, ce capteur peut devenir numérique et peut être utilisé dans les interruptions matérielles. Le potentiel de cette conception est énorme, sur sa base, vous pouvez assembler un tas de projets divers, et sa simplicité rend l'appareil accessible à tous.
En conclusion, je propose de regarder une vidéo dans laquelle tout est clairement montré. Le processus d'étalonnage et l'assemblage du commutateur de coton le plus simple sont également expliqués de manière beaucoup plus détaillée.
J'espère que ça vous a plu. Je vous souhaite un montage réussi!