

Je continue de modéliser et de construire des robots. J'ai déjà écrit des instructions pour créer une télécommande modèles et les robots. La télécommande est basée sur l'ancien joystick Sega. Ce joystick possède quatre flèches et 8 boutons, assez pour contrôler une machine ou un petit robot. La gestion a été effectuée au moyen d'une LED IR. Aujourd'hui, j'écrirai des instructions pour la modernisation de cette télécommande, à savoir sa conversion en télécommande Bluetooth. Selon le module Bluetooth utilisé, la télécommande se connectera soit à l'appareil préprogrammé lui-même, soit il sera possible de se connecter à la télécommande. Je décrirai les deux options. Nous aurons besoin de:
- Joystick de Sega
- Arduino Pro Mini 3.3v 8MHz
- USB-TTL
- 2 batteries Ni-Mn 1.2v 1000mA
- Module Bluetooth HC-05 ou HC-06
- LED rouge
- LED bleue
- Résistance 2x75Om, 2x5Om, 1x2Om
- Connecteur PLSx5 "mère"
- Colle chaude
- fils
- Compartiment à piles 4xAAA
- Fils multicolores
- Fer à souder, soudure, colophane
- bras droits
Étape 1 Choisir un module Bluetooth
Deux modules sont nécessaires pour la communication. Nous allons en insérer un dans la télécommande, et le second nous nous connecterons à la machine à écrire ou le robot. Il existe un grand nombre de modules Bluetooth. Ils diffèrent par leurs fonctions et leurs protocoles de communication pris en charge. Un exemple de liste de modules trouvés:
- HC-03, HC-04 (HC-04-M, HC-04-S) sur la puce BC417143;
- HC-05, HC-06 (HC-06-M, HC-06-S) sur la puce BC417143;
- HC-05-D, HC-06-D;
- HC-07 - module avec une puce CSR 41C6;
- HC-08 - module à ultra-faible consommation d'énergie et protocole Bluetooth 4.0;
- HC-09 est le module le plus récent conçu pour remplacer les HC-06 et HC-07.
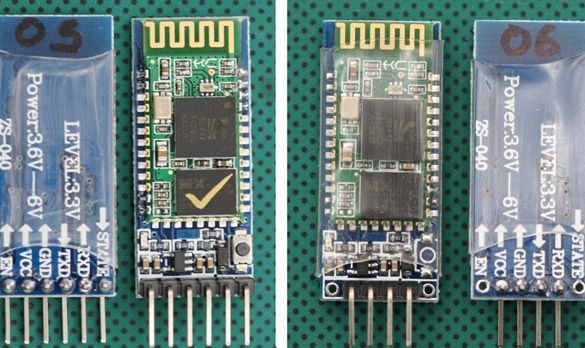
Je me suis installé sur deux modules HC-05 et HC-06, car ils sont optimaux en termes de prix / fonctionnalité. Ils prennent en charge le protocole de communication - Bluetooth Specification v2.0 + EDR. La portée est jusqu'à 10 mètres (niveau de puissance 2). Compatible avec tous les adaptateurs Bluetooth prenant en charge SPP. Le volume de la mémoire flash (pour stocker le firmware et les paramètres) est de 8 Mbit. Ils fonctionnent à une fréquence d'un signal radio - 2,40 .. 2,48 GHz. L'interface hôte est USB 1.1 / 2.0 ou UART. Ils ont une faible consommation d'énergie - le courant pendant la communication est de 30 à 40 mA. La valeur de courant moyenne est d'environ 25 mA. Une fois la connexion établie, le courant consommé est de 8 mA. Ces modules sont faciles à trouver, ce sont les plus courants. Les modules sont très similaires, mais la principale différence entre eux est que le HC-05 peut fonctionner à la fois en mode maître et en mode esclave.HC-06 ne peut être qu'un esclave. En termes simples, le HC-06 ne peut pas détecter un appareil couplé et établir une connexion avec lui; il ne peut qu'obéir au maître. Les modules sont vendus sous forme de deux cartes soudées ensemble. Le plus petit est le module d'usine. Large - une planche à pain spéciale pour le bricolage. Il ressemble à une carte plus petite avec une puce BC417:

Et donc les modules DIY HC-05 et HC-06 eux-mêmes:
Vous pouvez acheter un module sans planche à pain. Cela coûte un peu moins cher, mais vous devrez ensuite installer un régulateur de tension de 3,3 V pour le module. De plus, la distance entre les contacts est petite et vous devrez vous tourmenter en soudant au module filaire.
Pour établir la communication entre la télécommande et le robot ou la machine, vous devez configurer deux modules Bluetooth l'un sur l'autre. Dans ce cas, nous allons configurer le module HC-05 pour qu'il trouve et se connecte au HC-06.
Étape 2 Configurez le HC-06.
Vous devez d'abord connecter le HC-06 à l'ordinateur. Cela peut être fait en connectant le module via un adaptateur USB-UART. Dans ce cas, la connexion est la suivante:
Bluetooth - USB-UART
TX - RX
RX - TX
VCC - +5
GND - GND
Si vous n'avez pas USB-UART à portée de main, vous pouvez écrire l'esquisse suivante sur n'importe quelle carte Arduino:
Connectez-vous comme suit:
Bluetooth - Arduino
TX - broche 2
RX - broche 3
VCC - +5
GND - GND
Ensuite, nous ouvrons n'importe quel programme de terminal, sélectionnons le port de communication auquel le HC-06 est connecté, la vitesse par défaut est 9600, NL et CR ne sont pas nécessaires. Si aucune connexion Bluetooth n'est établie avec le HC-06, le module est en mode de saisie des commandes AT. Si le module ne répond pas, essayez de le surcharger en déconnectant le fil positif et en le reconnectant. Et entrez les commandes suivantes:
"AT" - sans guillemets, la réponse "OK" devrait venir.
"AT + ADDR" - avec cette commande, nous découvrirons l'adresse unique de HC-06, notez cette adresse
"AT + BAUD7" - réglez la vitesse sur 57600
"AT + RESET" - on surcharge le module
Il n'est pas nécessaire de saisir les commandes suivantes, mais au cas où il serait préférable de les connaître:
"AT + NAME
«AT + ORGL» - réinitialisation du module aux paramètres d'usine
Ceci termine la configuration du HC-06.
Étape 3 Configurez HC-05.
Nous connectons le module de manière similaire à HC-06. Ensuite, ouvrez n'importe quel programme de terminal, sélectionnez le port com sur lequel se bloque USB-UART ou Arduino, la vitesse de communication par défaut est 9600, mais je me suis également rencontré à une vitesse de 38400, si vous ne l'avez pas changé, sélectionnez 9600, vous ne pouvez pas vous connecter, passez à 38400. Aussi Cela vaut la peine d'inclure les paramètres NL et CR. Pour transférer le mode d'entrée de commande AT, vous devez appuyer sur le bouton de la carte HC-05, puis saisir les informations suivantes:
"AT" - entré sans guillemets, la réponse "OK" devrait venir. Si vous venez, nous continuerons à saisir des commandes.
"AT + ROLE = 1" - avec cette commande nous définissons le rôle du module avec le chiffre:
0 - esclave, 1 - maître, 2 - esclave dans le cycle *. Vous devriez obtenir la réponse "+ RÔLE: 1 \ r \ n" ou "OK"
"AT + CMODE = 0" - le module dans le rôle de maître est connecté uniquement à l'appareil Bluetooth dont l'adresse est indiquée par la commande "AT + BIND".
«AT + BIND: 1234,56,123456» - pour établir une connexion avec votre HC-06, vous devez entrer son adresse ici. Après avoir entré toutes les commandes, le module est dans le rôle du maître (ROLE = 1) et le mode de connexion à l'adresse fixe (CMODE = 0) est défini, il se connectera uniquement au périphérique Bluetooth dont l'adresse est spécifiée par cette commande. Des parties de l'adresse sont saisies: lors de l'installation - séparées par une virgule, et en cas de réponse - via deux points. Vous obtiendrez la réponse: "+ BIND: 1234: 56: 789ABC \ r \ n" ou "OK"
«AT + UART = 57600,0,0» - définissez la vitesse sur 57 600 bps, le bit d'arrêt est représenté par le nombre: 0 - un, le chèque est représenté par le nombre: 0 - sans vérification
Si vous êtes confus au sujet des paramètres du module ou s'il ne fonctionne plus correctement, essayez la commande suivante:
«AT + ORGL» - Le module réinitialise les paramètres suivants CLASS = 0, IAC = 9e8b33, ROLE = 0, CMODE = 0, UART = 38400,0,0, PSWD = 1234, NAME = hc01.com.
Et puis reconfigurez les paramètres dont vous avez besoin.
De cette façon, nous avons créé un lien solide entre HC-05 et HC-06. Lorsque les modules HC-05 sont allumés, il établit une connexion avec le HC-06. D'après mon expérience personnelle, je peux dire qu'il vaut mieux allumer le HC-05 d'abord, puis le HC-06. Si la connexion est perdue, vous devez surcharger les deux modules.
Étape 4 Préparation de la télécommande.
Cette étape est décrite en détail dans les instructions précédentes sur:
https://frm.imdmyself.com/8626-ik-pult-iz-dzhoystika-ot-sega.html
Il est nécessaire d'effectuer les étapes 1 à 4. Le soudage de la diode IR est facultatif, bien qu'il n'interfère pas.
Étape 5 Connexion d'un module Bluetooth.
Je vous conseille d'installer HC-06 dans la télécommande. Étant donné que pour modifier les paramètres du module, il vous suffit de remplir le croquis correspondant dans l'Arduino Pro Mini. Dans le cas du HC-05, vous devrez démonter la télécommande afin d'appuyer sur le bouton pour passer en mode de commande AT.Nous connectons tout selon le schéma suivant
Joystick - Arduino
Flèche vers le haut - broche 2
Flèche vers le bas - broche 4
Flèche gauche - broche 5
Flèche droite - broche 6
Bouton A - broche 8
Bouton B - broche 10
Bouton C - broche 7
Bouton X - broche 12
Bouton Y - broche 11
Bouton Z - broche 9
Bouton de démarrage - broche 14 (A0)
Bouton de réinitialisation - RST
Général - GND
Bluetooth - Arduino
TX - broche 16 (A2)
RX - broche 17 (A3)
VCC - + 5
GND - GND
HC-05 nous nous connectons à votre machine à écrire ou robot que vous allez contrôler. Les options de connexion et les croquis se trouvent dans mes autres instructions. Lors de l'écriture d'une esquisse de robot, vous devez définir la vitesse de connexion sur 57600 et utiliser la bibliothèque SoftwareSerial dans l'esquisse.
Étape 6 Préparation de l'environnement et du micrologiciel.
La meilleure façon d'écrire et de modifier une esquisse est d'utiliser l'IDE Arduino. La version Arduino IDE ne doit pas être inférieure à 1,8. Téléchargez l'IDE Arduino sur le site officiel:
https://www.arduino.cc/en/Main/Software
Ensuite, vous devez ajouter la bibliothèque à l'IDE Arduino. L'esquisse utilise une bibliothèque SoftwareSerial.h (pour la communication avec le module Bluetooth):
Vous devrez le télécharger et l'installer. Vous pouvez installer la bibliothèque en déballant l'archive et en déplaçant les fichiers décompressés dans le dossier «bibliothèques» situé dans le dossier avec l'IDE Arduino installé. Ou vous pouvez utiliser l'outil d'ajout de bibliothèque intégré - sans déballer l'archive téléchargée, sélectionnez le menu Sketch - Connect Library dans l'IDE Arduino. En haut de la liste déroulante, sélectionnez l'élément "Ajouter une bibliothèque .Zip". Et indiquez l'emplacement de l'archive téléchargée. Après avoir installé la bibliothèque, vous devez redémarrer l'IDE Arduino.
Notre télécommande clignote de la même manière que la version précédente de la télécommande, connectée via USB-TTL via un connecteur, la charge se fait également à travers elle. Lorsque vous remplissez l'esquisse, cliquez sur Réinitialiser.
