Au cours de ses études, l'auteur a joué à des jeux avec prise en charge de l'accéléromètre sur son téléphone. Il aimait vraiment conduire une voiture au téléphone simplement en l'inclinant, puis il a commencé à rêver de fabriquer une voiture avec le même contrôle dans la vie réelle. Ayant maintenant Arduino et ayant acquis des compétences en programmation, il est temps de créer une machine gérée sur Android, il l'a appelé Hercules.
Elle a obtenu ce nom en raison du couple énorme et de la vitesse élevée. Modèle peut être contrôlé à l'aide d'un téléphone Android via Bluetooth. Tout téléphone avec ce système d'exploitation est adapté pour le contrôle, l'auteur ne limite pas une télécommande. De plus, l'utilisation du téléphone a permis d'économiser de l'argent, car je n'avais pas à dépenser d'argent pour créer une télécommande.
Matériaux et outils:
- Arduino Uno
- Émetteur-récepteur Bluetooth
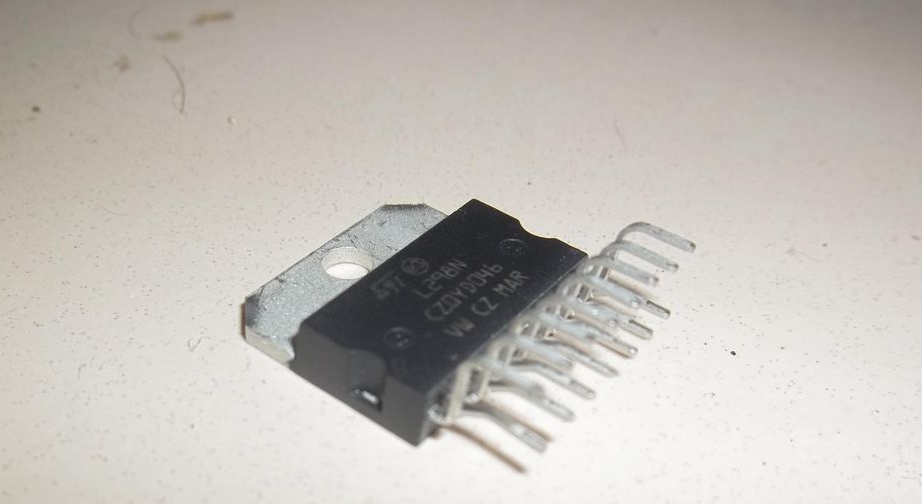
- Pilote bimoteur (avec pont en H L298)
- Moteurs à engrenages 4 pièces (la puissance est sélectionnée en fonction de l'application de la machine)
- Roues 4 pièces
- Batterie 1Ah SLA 12V
- Base pour composants (châssis)
- planche à pain
- Boîtes pour le logement de 4 pièces
- Commutateur SPST
- Fils de connexion pour Arduino
- Fils de soudure
- Écrous et vis de petite taille
- Résistance 10 kOhm 1 pc
- Résistance 20 kOhm 1 pc
- téléphone Android
- fer à souder
- souder
- pâte à souder
- percer





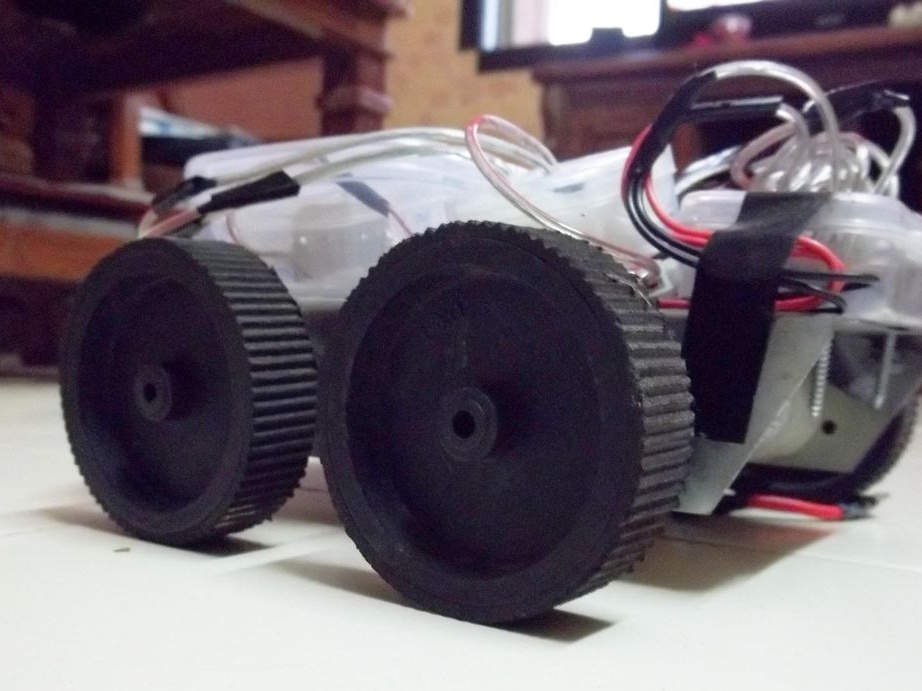
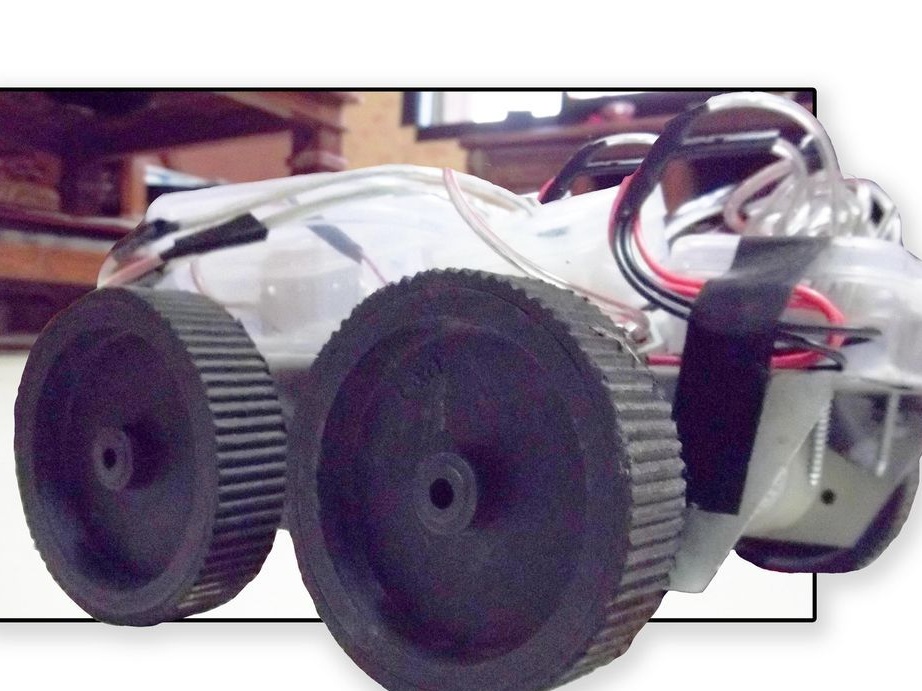
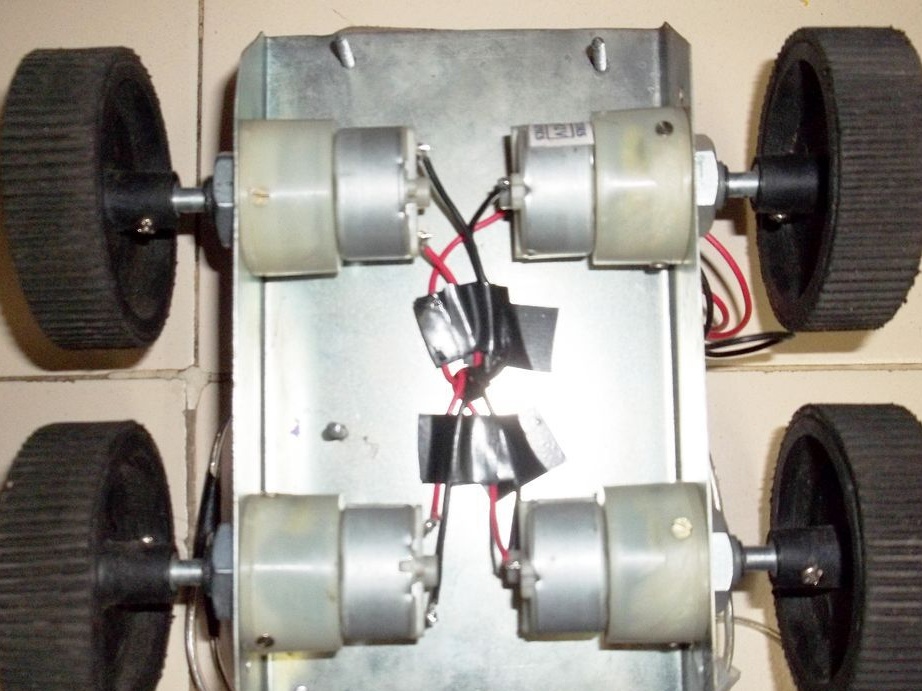
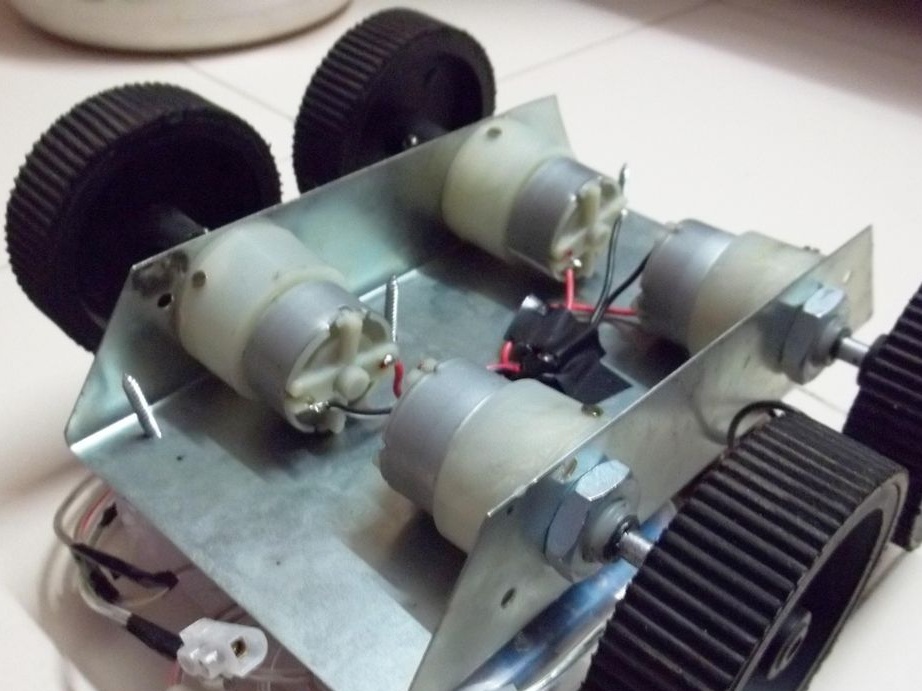
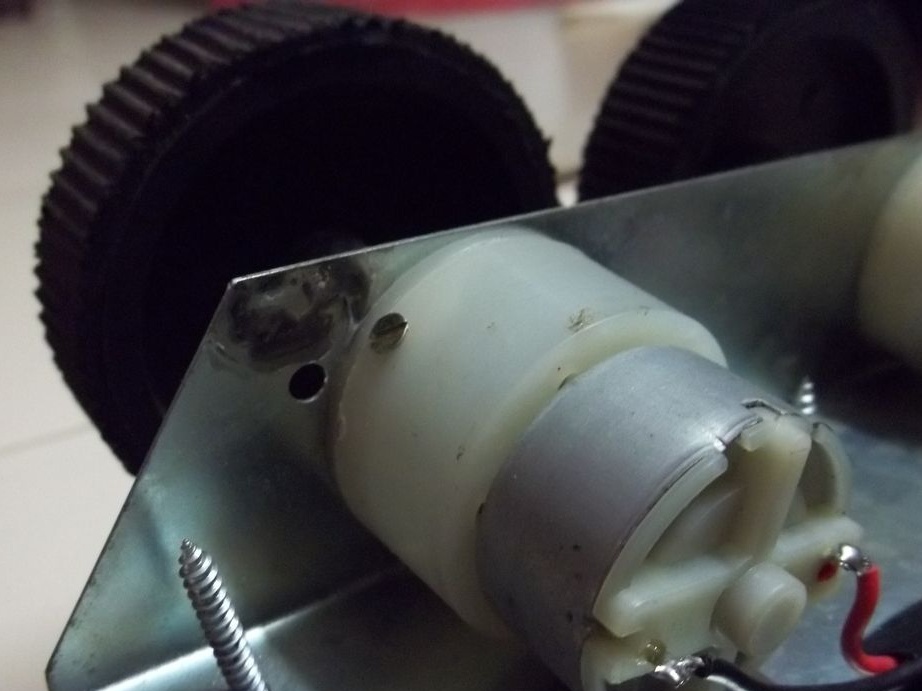
Première étape. Roues et châssis.
Les vis du moteur ont facilité leur installation sur le châssis à l'aide d'écrous. Les roues sont installées jusqu'à l'arbre du moteur. Deux moteurs droits sont activés en parallèle l'un avec l'autre, ainsi que deux moteurs gauches. À quoi ressemble le châssis après l'installation des quatre roues et des moteurs peut être vu sur la photo ci-dessous.
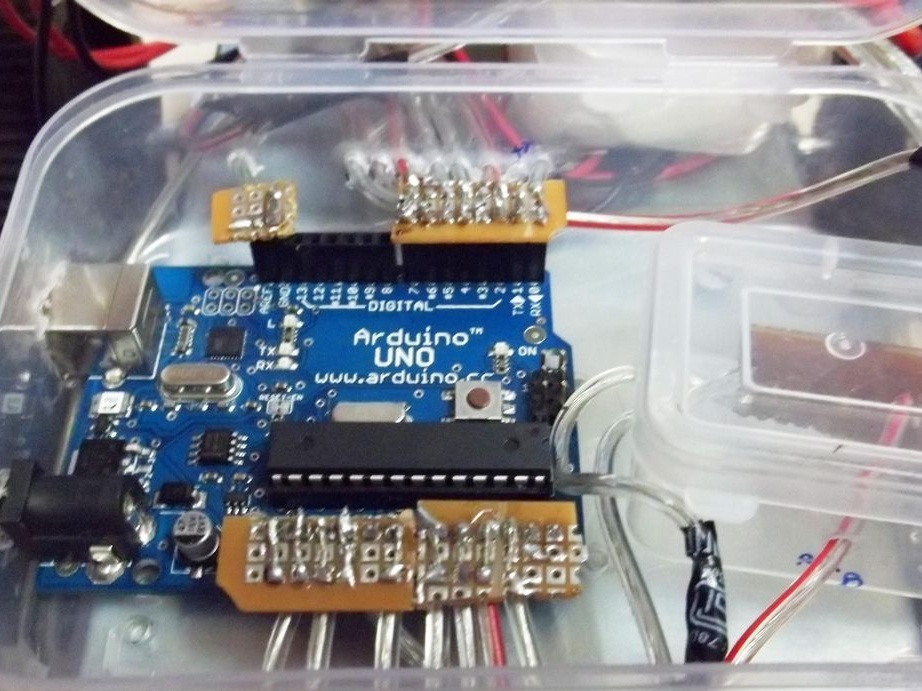
Deuxième étape Logement pour Arduino.
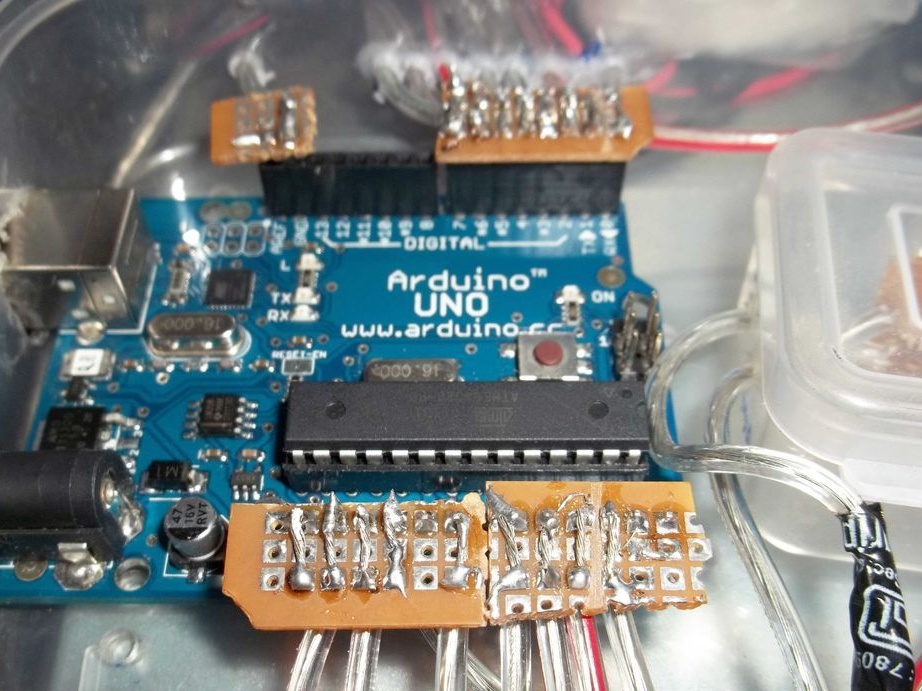
Le diagramme de cas de l'Arduino est divisé en plusieurs parties. Une telle solution de conception modulaire aidera à l'avenir à prendre en charge le circuit ou à éliminer un éventuel dysfonctionnement. Si l'un des composants tombe en panne ou brûle, il peut être remplacé rapidement et sans casser la conception. La boîte pour Arduino a été créée comme suit:
- Quatre parties ont été découpées dans la planche à pain, deux d'entre elles avec des trous de taille 8x3, les deux autres parties 6x3.
- Les broches BLS ont été soudées à chaque carte sur le côté long.
- Chaque broche de la planche à pain a également été soudée avec des fils d'environ 10 cm de long, afin que les fils ne se détachent pas de l'Arduino, car maintenant la charge a commencé à être répartie uniformément.
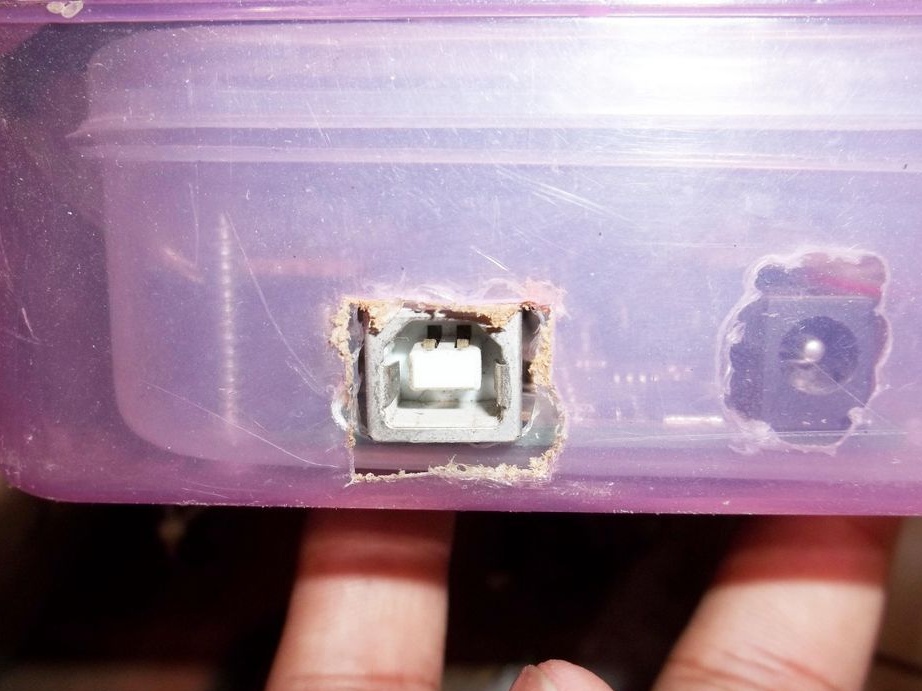
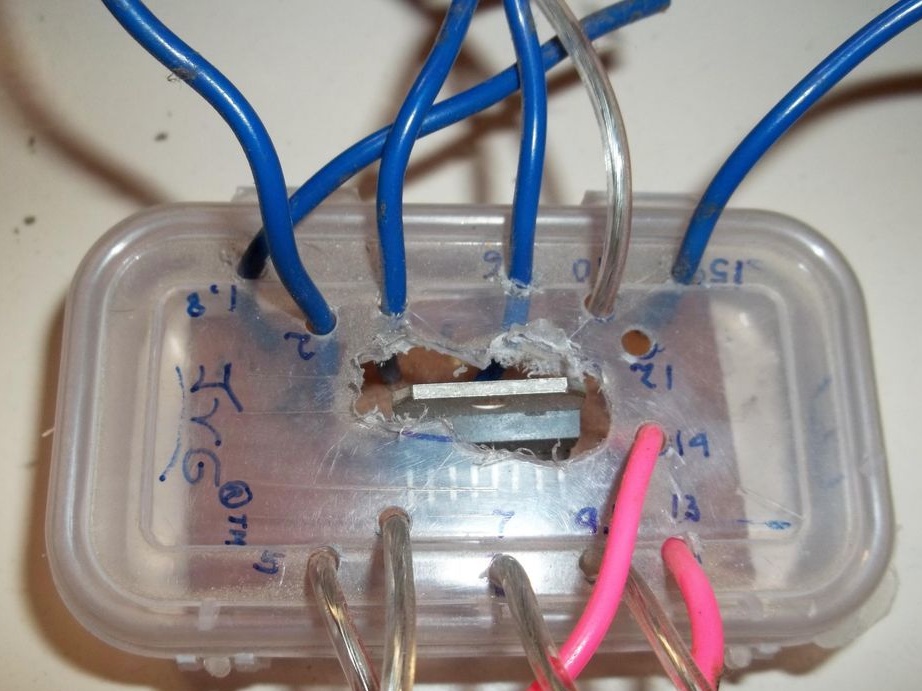
- Ensuite, la carte Arduino a été placée dans le boîtier de sorte que la sortie USB touche le mur. Un trou a été découpé pour cette sortie, cela aidera à charger des programmes supplémentaires dans la machine ou à apporter des corrections aux programmes existants. Sur les côtés de la boîte, des trous ont été percés pour les fils qui iraient de la carte. Des trous supplémentaires ont été découpés au bas de la boîte, sous les connecteurs de montage Arduino.


Troisième étape Émetteur-récepteur Bluetooth.
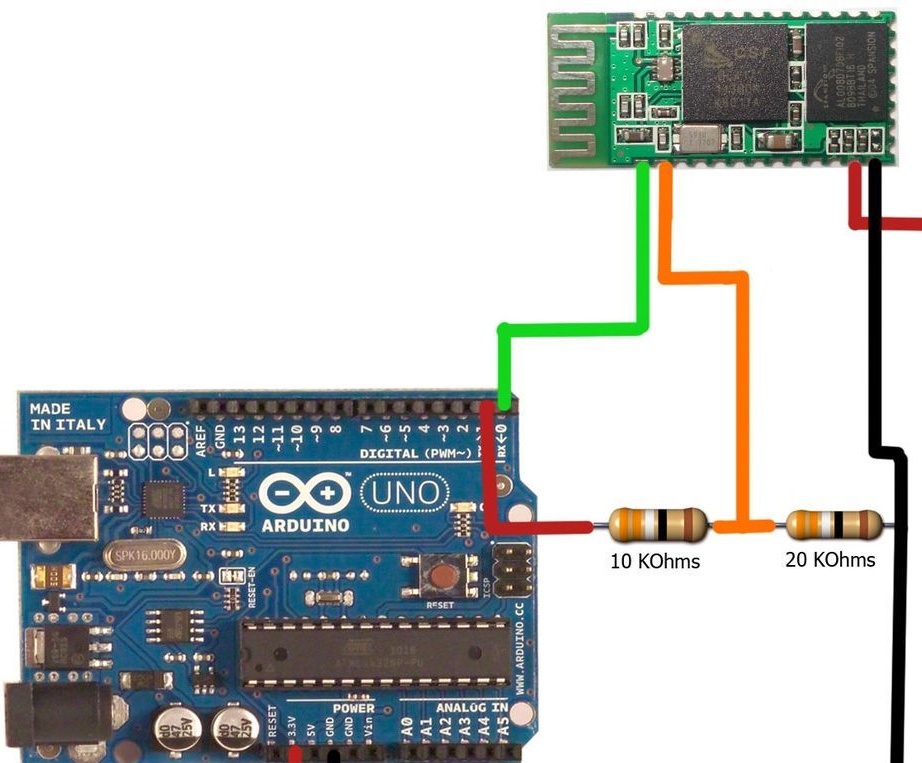
Souder des fils à un émetteur-récepteur Bluetooth est la tâche la plus difficile à assembler ce projet, l'auteur manquait vraiment d'une troisième main lors de la soudure. Quatre conducteurs de 10 cm de long ont été utilisés; ils ont été soudés aux broches 1 (Tx), 2 (Rx), 12 (+ 3,3B) et 13 (GND). Maintenant, l'émetteur-récepteur pourrait être placé dans un boîtier avec des trous pré-préparés pour les fils. L'auteur a collé les fils à la boîte pour empêcher les fils de se déchirer les contacts.



La quatrième étape. Boîtier pour résistances.
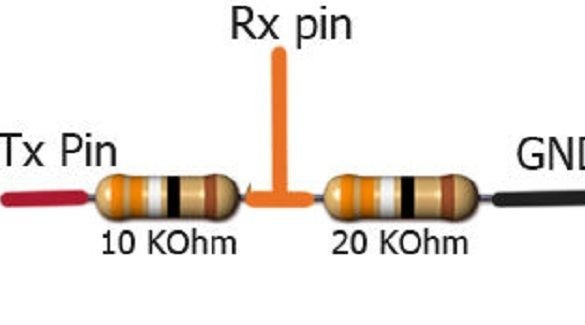
En raison du fait que la sortie Arduino Tx envoie un signal avec une tension de 5V et que le module Bluetooth fonctionne avec une tension de 3,3V, il était nécessaire de convertir 5V en 3,3V. Pour cette tâche, l'auteur a utilisé un diviseur de tension. Selon le circuit fourni ci-dessous, il a soudé une résistance à la pièce restante de la planche à pain. Bien sûr, il était possible de mettre ce circuit dans un boîtier Arduino, mais il n'y avait pas assez d'espace, donc l'auteur en a fait un autre pour les résistances.


Cinquième étape Conducteur de moteur.
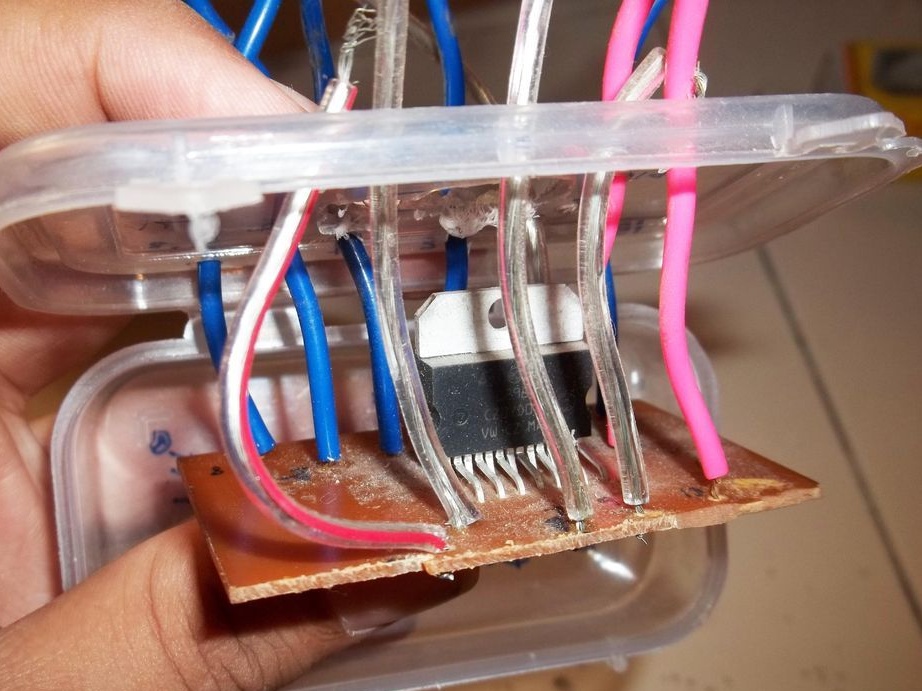
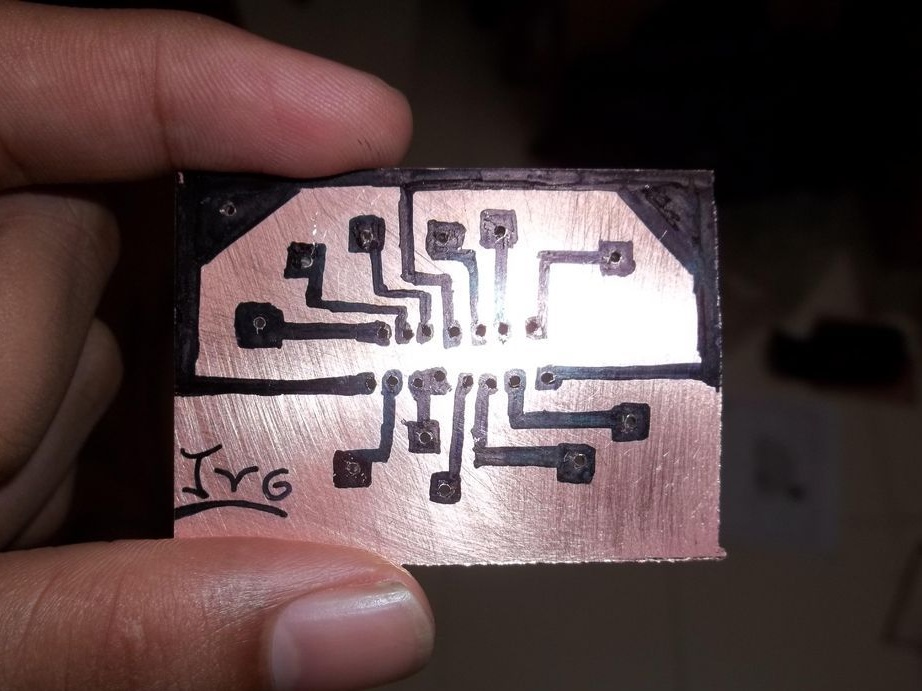
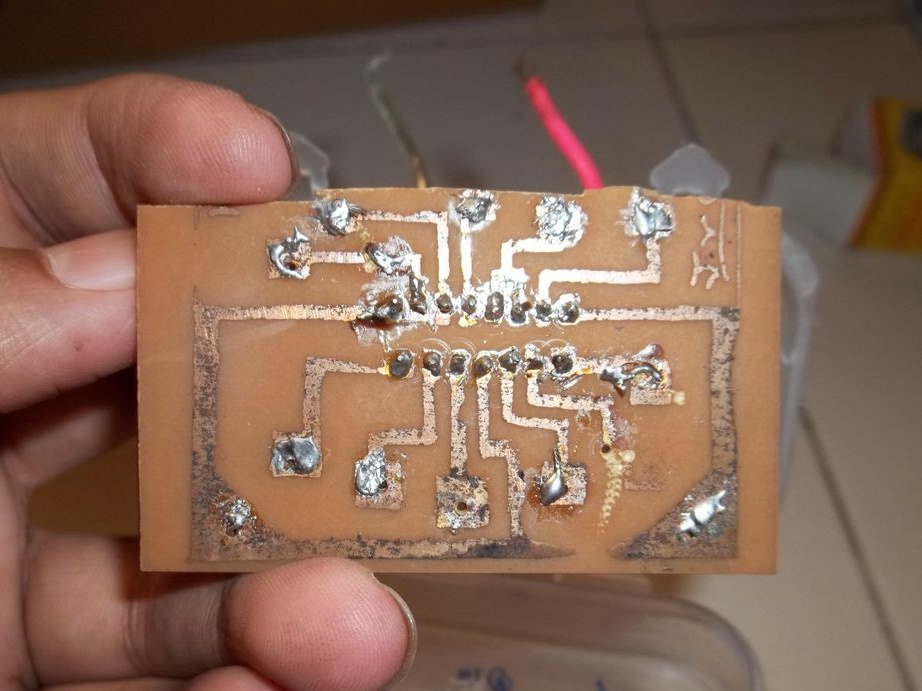
L'auteur utilise un double pilote avec un pont en H L298 IC, il contrôle quatre moteurs. Pour lui, l'auteur a créé une carte pour lui faciliter la soudure des fils, la carte elle-même sur la photo ci-dessous. Après la soudure, le pilote a également été placé dans un boîtier séparé avec des trous pour les fils.
Étape six L'assemblage final.
Chaque composant individuel est connecté à l'Arduino conformément au schéma.
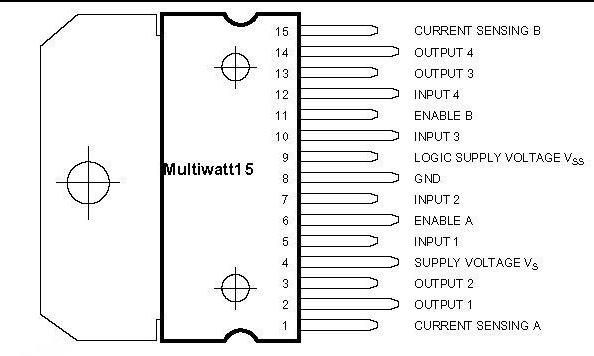
La connexion du pilote du moteur avec Arduino a eu lieu selon ce brochage:
1 à GND
2 au premier contact des moteurs gauches
3 au deuxième contact des moteurs gauches
4 à une batterie 12V
5 broches Arduino 2
6 à la broche Arduino 3
Arduino 4 à 7 broches
8 à GND
9 à 5 V avec Arduino
Arduino 5 à 10 broches
11 broches Arduino 6
12 à la broche Arduino 7
13 au premier contact des bons moteurs
14 au deuxième contact des moteurs droits
15 à GND
L'alimentation 12V était connectée à la broche Vin Arduino et à la broche 4 du L298. GND Arduino respectivement à l'alimentation GND.
Septième étape. Programme pour Arduino.
Pour que le programme fonctionne correctement, il était nécessaire d'installer la bibliothèque Amarino, qui peut être téléchargée. Vous pouvez télécharger le code source d'Arduino sous l'article.
Étape huit. Logiciels pour Android
Amarino Library est une boîte à outils pour travailler avec les smartphones Android. En installant une application supplémentaire sur votre téléphone, vous pouvez commencer à écrire un programme.
L'application et le plug-in Amarino peuvent être téléchargés à partir de. Après les avoir installés sur le téléphone, il ne restait plus qu'à allumer la machine et à s'y connecter, et sélectionner la section Ajouter des événements-> Capteur d'accéléromètre.
Vidéo avec l'installation d'Amarino et de ses plugins:
La vitesse de la machine est égale à l'inclinaison du téléphone. Si la machine se déplace dans la mauvaise direction, vous devez échanger les fils des moteurs.