
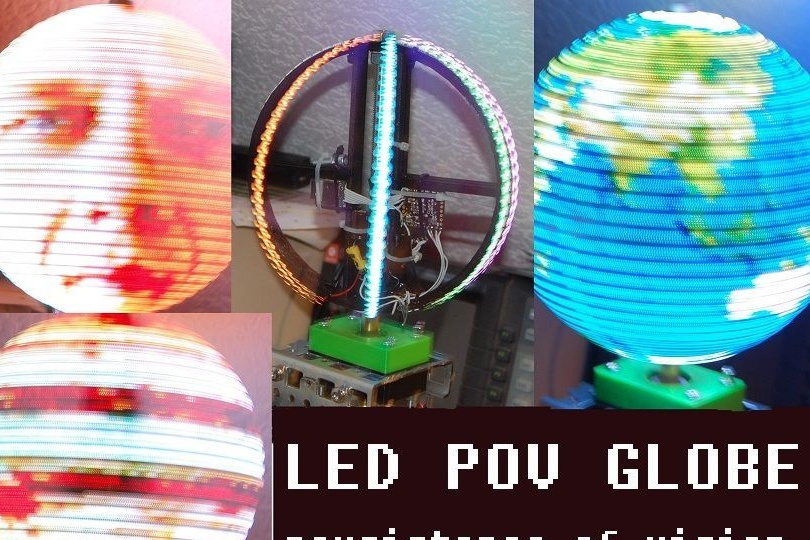
Ce didacticiel explique comment créer un globe POV avec moins. électronique composants que d'autres appareils similaires. Grâce à l'utilisation de LED RGB avec un contrôleur APA102 intégré. Cela vous évitera de souder de nombreux fils. Vous pouvez en savoir plus à leur sujet. Ces voyants n'ont pas besoin d'un pilote supplémentaire. Ils sont connectés directement au microcontrôleur de deux manières. Cela vous permet de changer de LED très rapidement. Pour obtenir une image stable, la synchronisation SPI est fournie à une fréquence de 10 MHz. Un autre avantage de cette conception est l'utilisation d'une carte flash, qui stocke l'image au format BMP.
1 Matériel requis

Pour l'axe du globe, vous aurez besoin de:

1. Goujon avec filetage M8 et une longueur de 250 mm
2. Écrou M8
3. Manchon en laiton de 10 mm et 100 mm de long
4. Rondelles en plastique 8 mm 2 pièces (fichiers STL inclus)
5. couplage pour ceux qui utiliseront le moteur pas à pas NEMA 17
Pour alimenter l'anneau LED sur l'arbre, vous aurez besoin
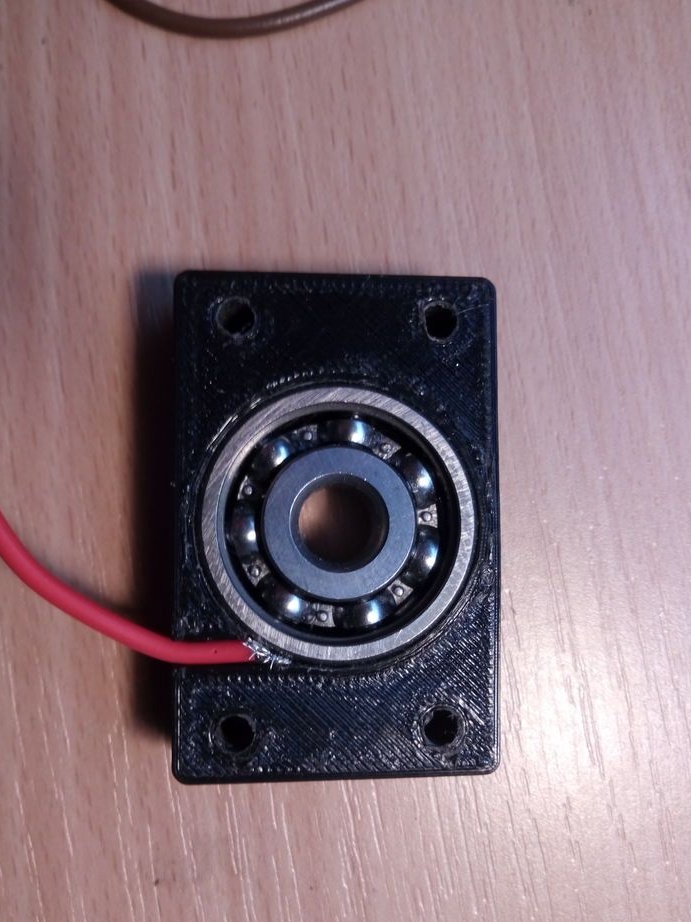
1. roulement à billes 6300 (10x35x11)
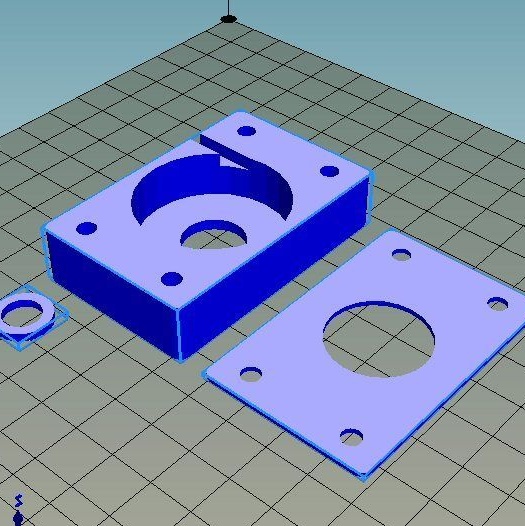
2. deux supports pour roulements. Imprimé sur une imprimante 3D ou en bois.
3. Quatre boulons M4x40 avec écrous
4. Conseils sur les fils 2 pcs 8 mm
5. avec un diamètre d'arbre de 5 mm
6. 4 boulons M4 pour le montage du moteur
7. peut-être un fan.
Alternativement, vous pouvez utiliser n'importe quel moteur avec le bon contrôle de couple et de vitesse. Le moteur utilisé dans cette conception a un couple maximal à un courant de 50A, mais la consommation de courant maximale pendant le fonctionnement n'est que de 18A.
Pour contrôler le pilote du servomoteur, utilisez
1.
2. deux boutons
Alimentation 12V pour moteur et 5V pour LED. Comme alimentation, vous pouvez utiliser l'ancienne unité à partir du PC. Vous pouvez acheter une alimentation 12v / 5A et vous y connecter
Pour l'anneau LED, vous aurez besoin de:
1.664 LED 2 bandes de 32 pièces
2. Condensateur 1000µF 10V
3. Capteur à effet Hall et aimant
4. La résistance de pull-up 1k, 10k
5. L'anneau doit être imprimé sur une imprimante 3D ou utiliser un morceau de tuyau en PVC
6. Liens en plastique (100 mm)
7. Une bonne colle qui colle ensemble et ne s'envole pas à 2500 tr / min
Vous aurez également besoin d'un microcontrôleur à hélice Parallax. Ou vous pouvez en utiliser un autre le modèle contrôleur, mais en plus prendre des frais pour. Ce contrôleur est programmé et flashé aussi simple que Arduino. Vous aurez besoin d'un adaptateur USB-TTL pour programmer les deux contrôleurs.
Corps.
Logement pour fait maison Vous pouvez en prendre assez fort. La chose la plus importante est que vous pouvez fixer solidement le moteur et les roulements.
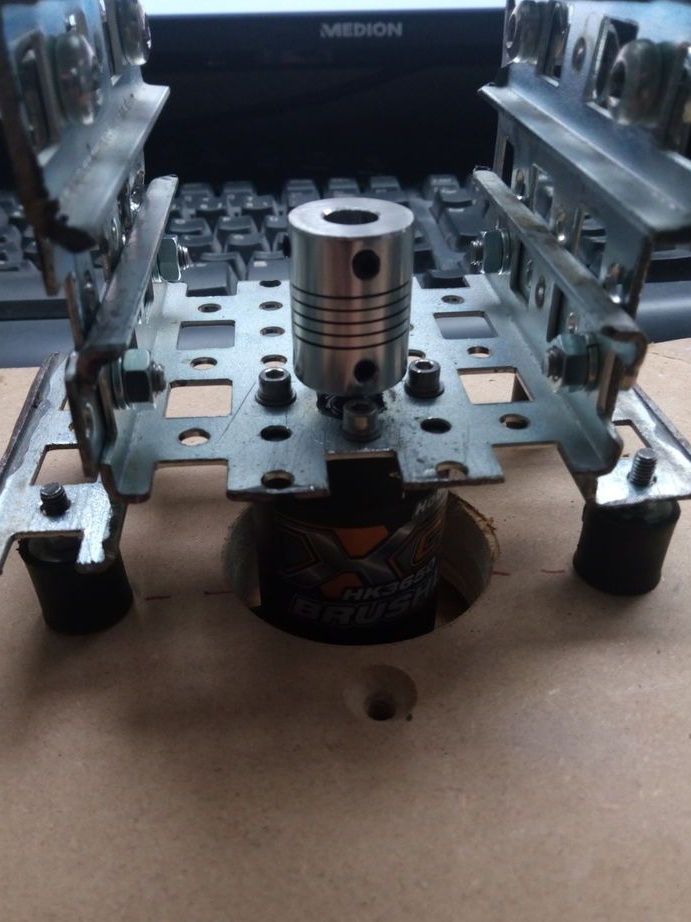
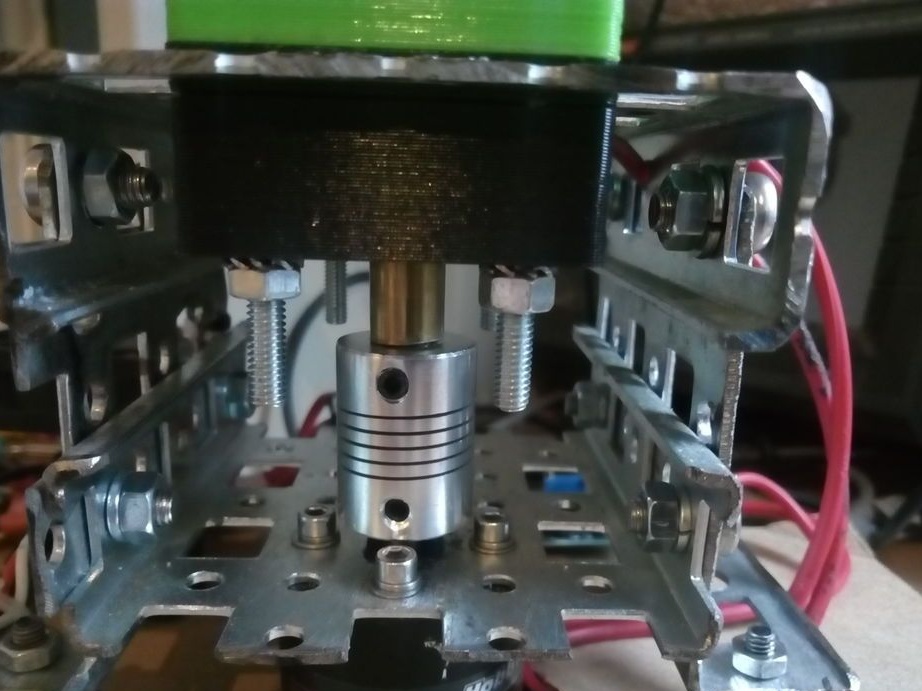
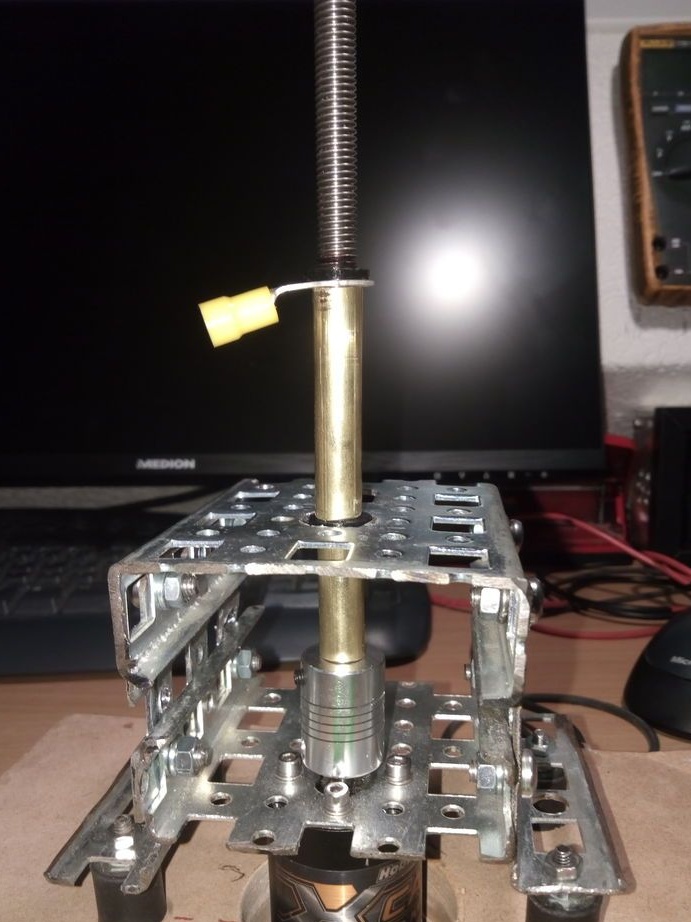
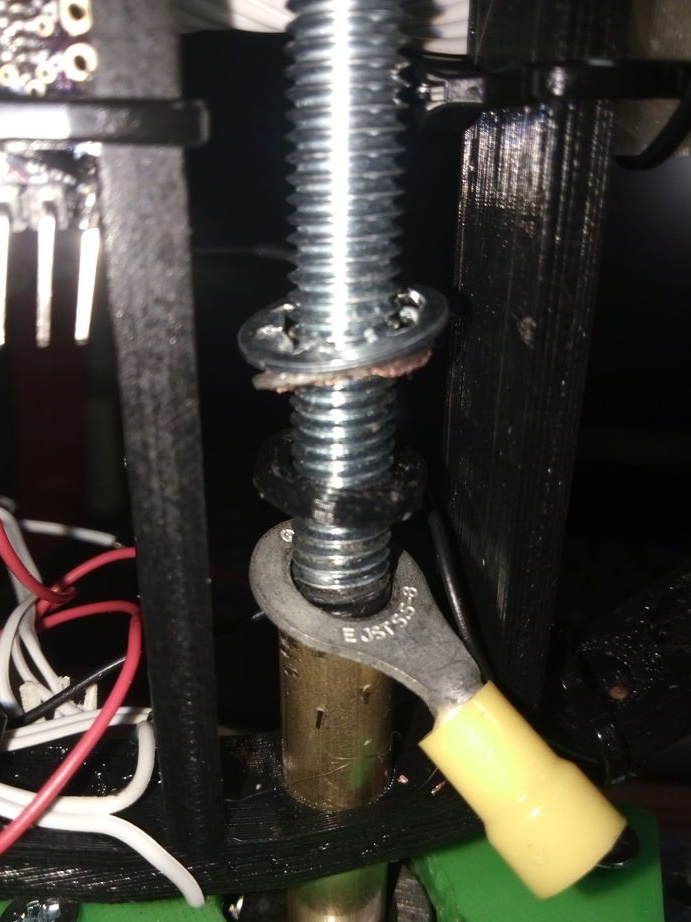
Un goujon de 250 mm de long est utilisé pour l'arbre d'entraînement.La longueur des bagues en laiton est de 50 et 30 mm. Dépend de la taille de l'anneau et de la longueur de l'arbre. Le manchon supérieur et plus long doit être isolé du goujon, car il est utilisé pour fournir plus d'alimentation aux LED. Pour ce faire, enroulez du ruban électrique sur une épingle à cheveux ou utilisez du thermorétractable, deux rondelles en plastique seront également nécessaires. Le manchon devra être percé à 8,5-9 mm sinon il ne rentrera pas. L'autre manchon et la tige forment un contact négatif.
La puissance négative est placée dans une rainure spéciale et pressée contre le roulement dans le support, qui peut être imprimé sur une imprimante. Fichier STL du support dans l'archive.


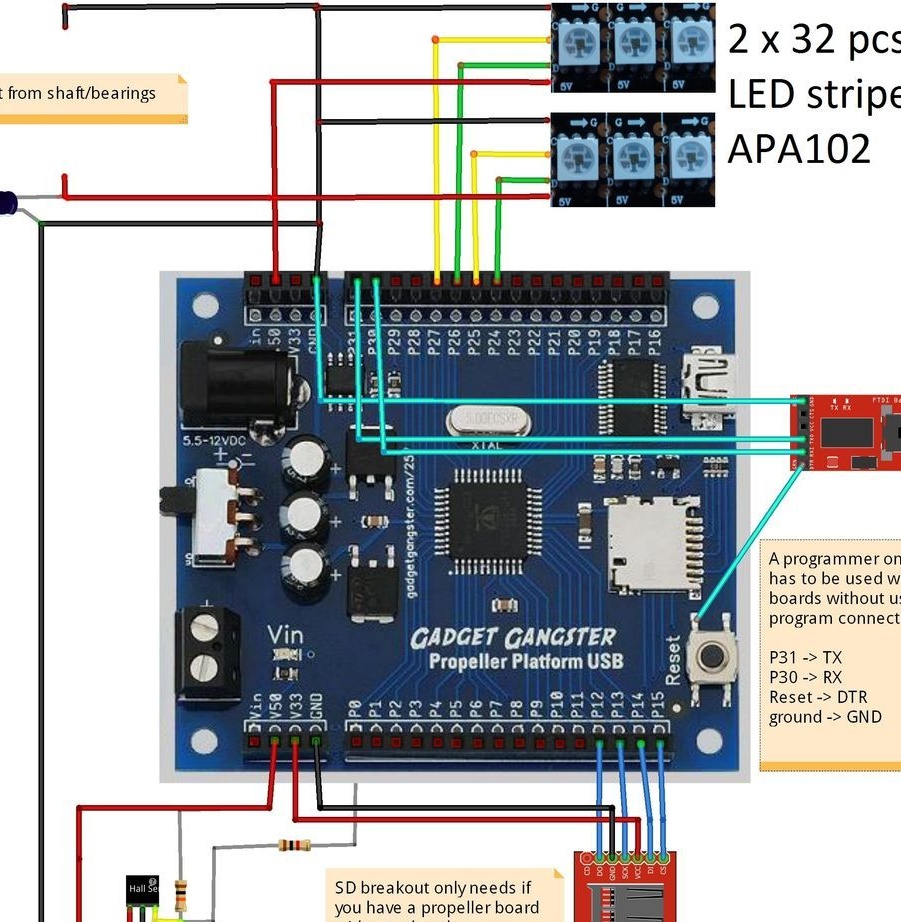
Vous devez maintenant connecter le moteur électrique, comme indiqué sur le schéma.
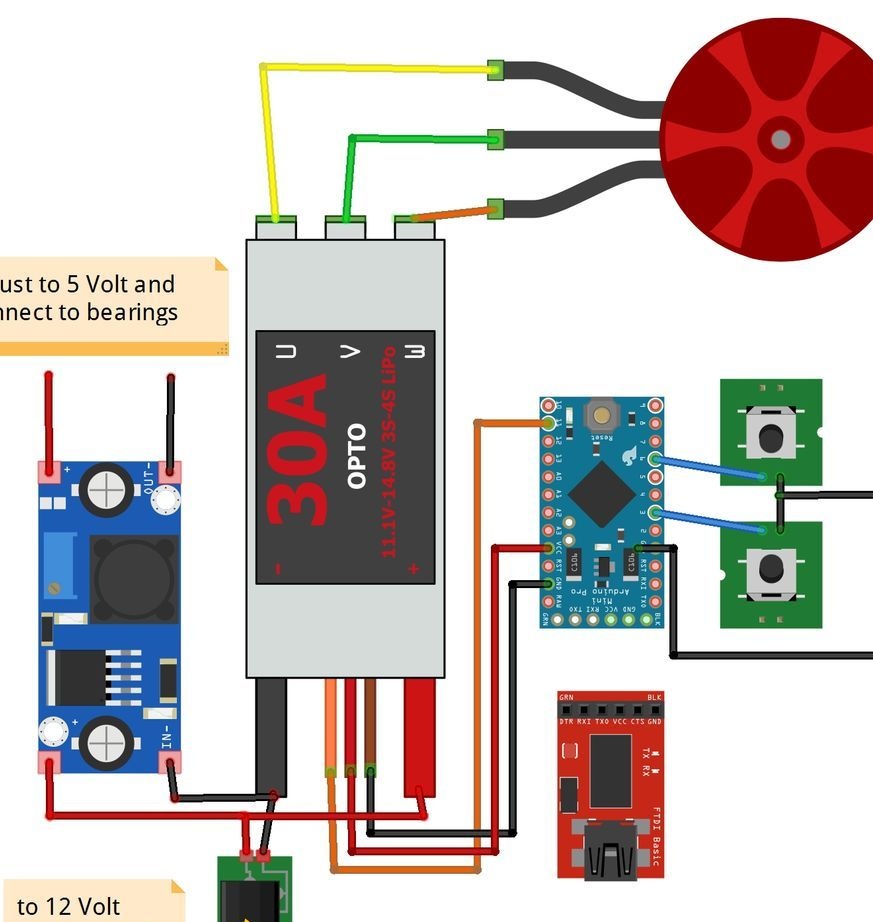
Deux boutons sur le diagramme sont utilisés pour régler la vitesse. Lorsque vous mettez l'appareil sous tension, l'ESC reçoit une valeur de 500 μs. Appuyez sur l'un des boutons pour allumer le moteur. L'esquisse prendra la valeur «StartPos = 625». Plus tard, lorsque vous ajustez la vitesse, cette valeur peut être modifiée. Appuyez sur le bouton pendant deux secondes et le moteur devrait s'arrêter.
Assemblage de la structure centrale.
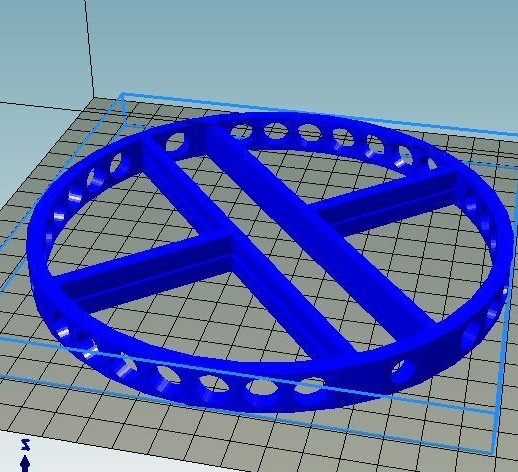

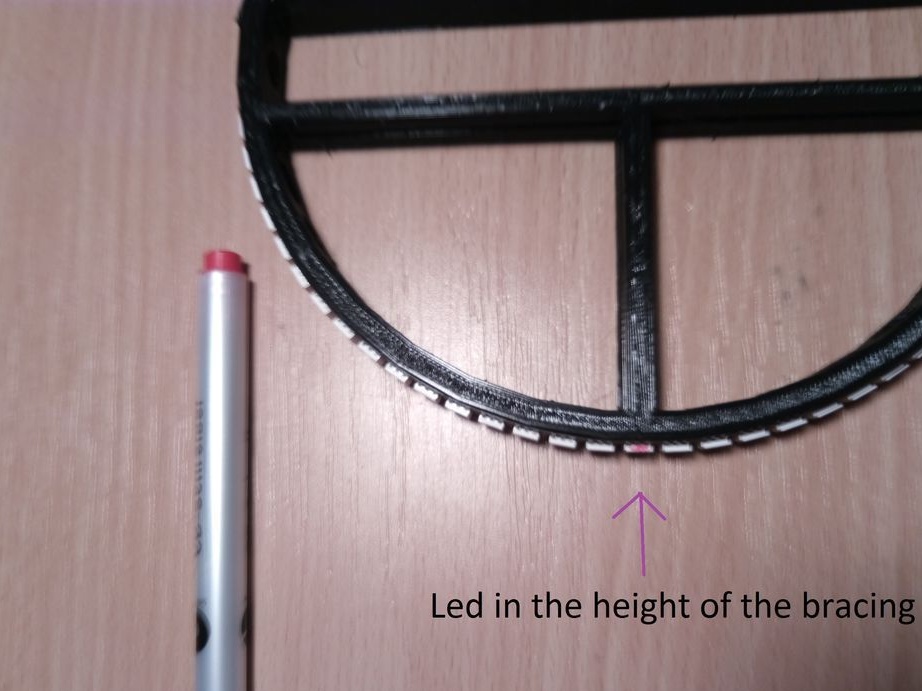
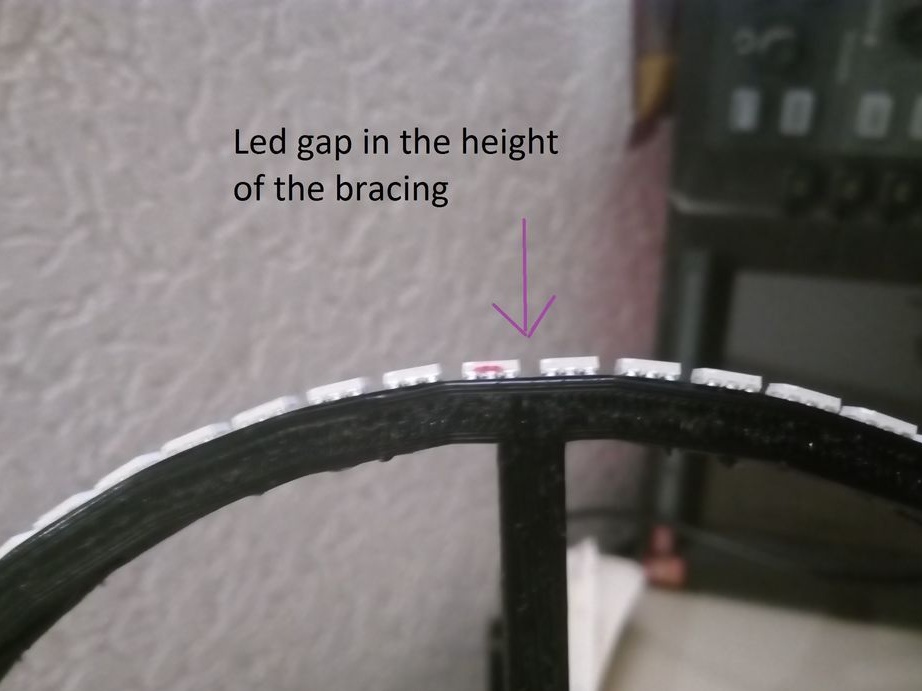


Pour ce faire, imprimez la bague elle-même à partir du fichier joint. L'auteur y a fait de nombreux trous afin de réduire le poids. Vous pouvez utiliser un morceau de tuyau en PVC. Deux bandes de 32 LED sont coupées. Deux bandes de LED forment des lignes paires et impaires. Disposez les bandes de manière à ce que les LED d'une bande soient situées entre les LED de l'autre, mais au verso. Après avoir attaché la bande, vous pouvez connecter les voyants de la carte contrôleur. Et puis vous devez équilibrer l'ensemble de l'assemblage.
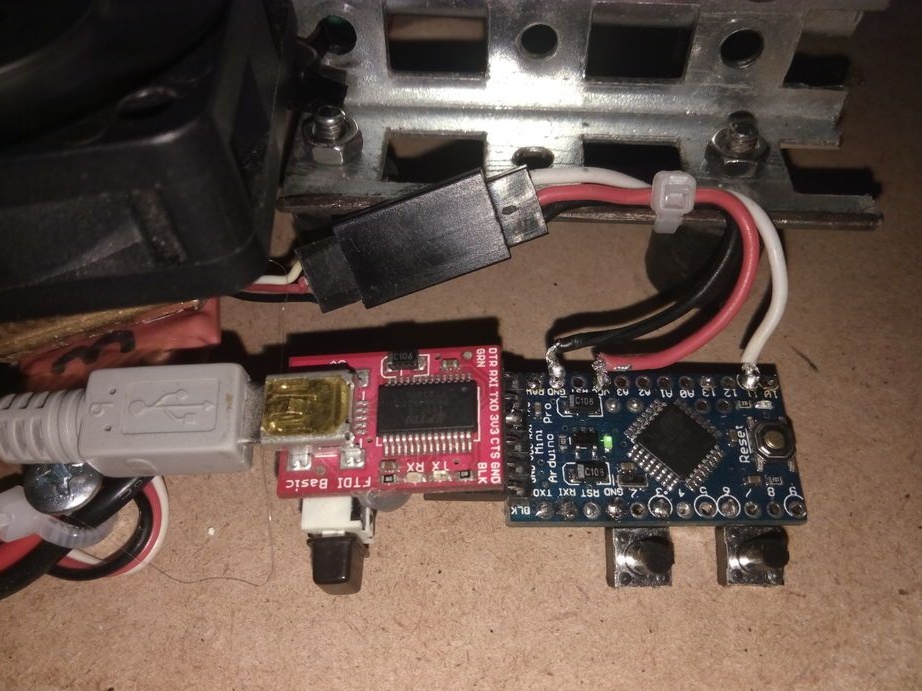
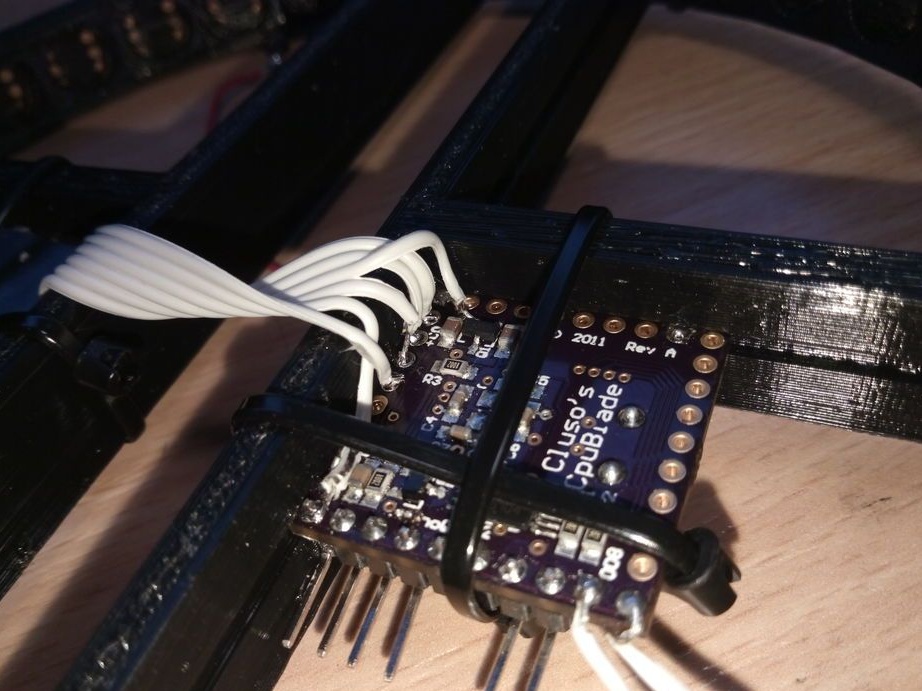
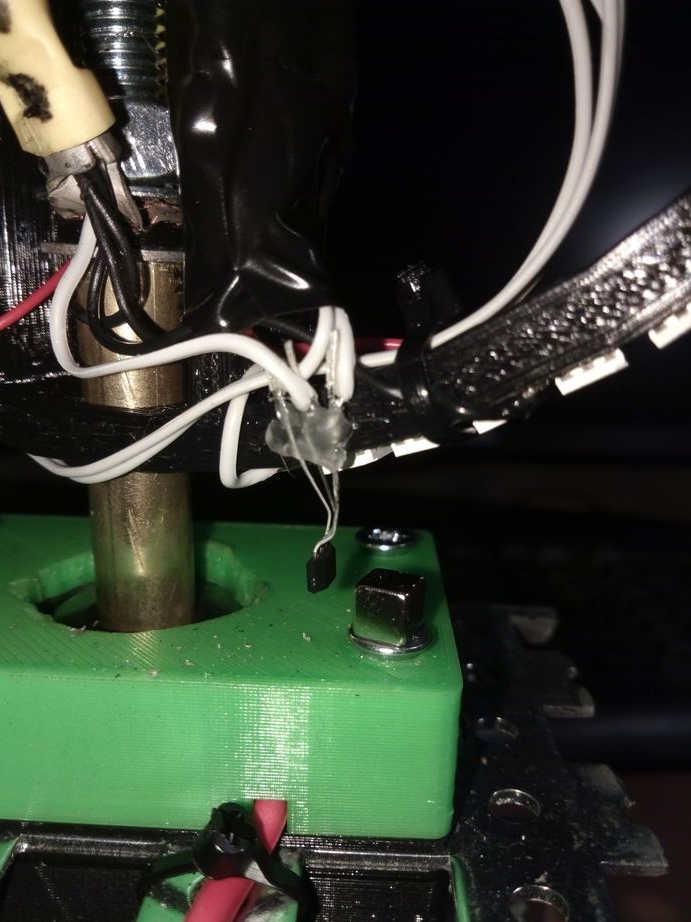
Les photos suivantes montrent comment connecter tous les composants de l'appareil ensemble. La photo montre également le capteur Hall installé avec un aimant.
Pour programmer le microcontrôleur à hélices Parallax dont vous avez besoin
NE connectez PAS votre équipement à un port USB ou série avant d'avoir installé le logiciel. Plus de détails sur le téléchargement du firmware sur Parallax peuvent être trouvés
L'auteur utilise une carte MCU plus ancienne et, par conséquent, moins économique en termes de consommation d'énergie, car il ne trouve pas de nouvelles bibliothèques sur les nouvelles cartes contrôleur.
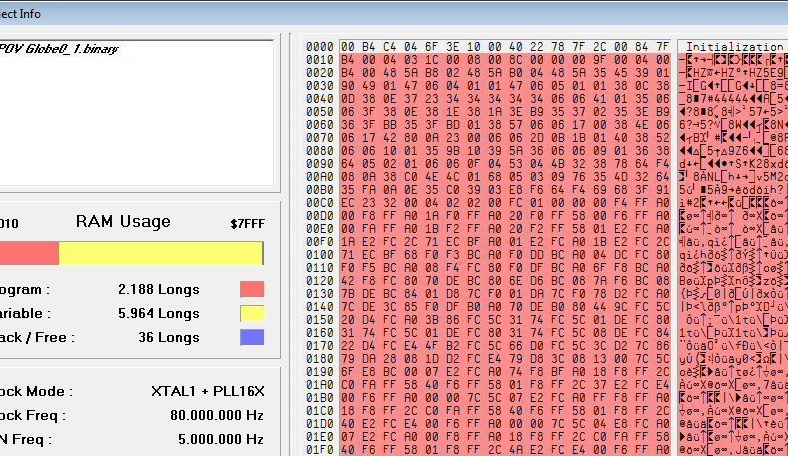
Après avoir collecté et connecté tout, vous devez programmer le contrôleur. L'auteur le fait avec aide. Fichiers avec firmware dans l'archive.
Vous pouvez maintenant essayer de démarrer l'appareil. Depuis le début, copiez l'image de test sur la carte SD et collez-la dans la fente.
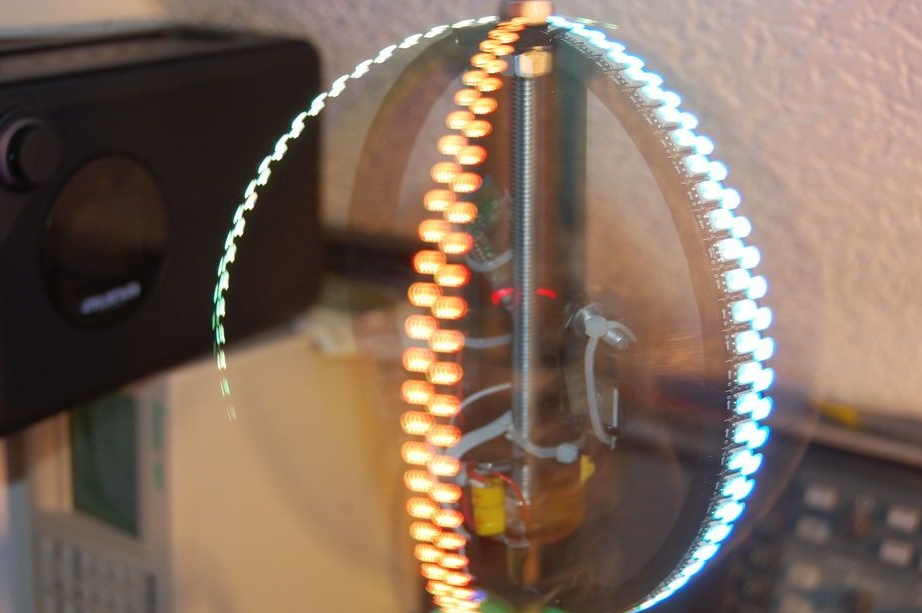
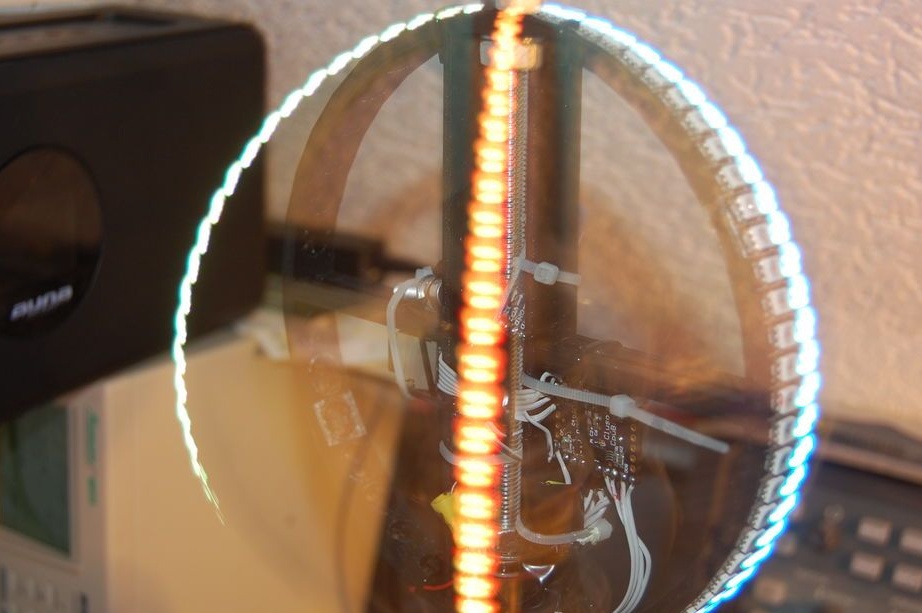
• Si vous tournez l'anneau à la main, les LED devraient clignoter chaque fois que le capteur à effet Hall passe l'aimant
• Mettez le moteur en marche. En augmentant la vitesse avec les boutons, il est nécessaire de s'assurer que les LED s'allument comme indiqué sur 2 photos
• Connectez la borne Arduino au contrôleur de moteur.
• N'oubliez pas la valeur affichée.
• Arrêtez le moteur
• Écrivez la valeur précédemment enregistrée dans la variable "startPos"croquis POV_MotorControl
• Programmez à nouveau l'Arduino.
La prochaine fois que votre moteur démarre immédiatement à la bonne vitesse. Vous pouvez maintenant "remplir" sur la carte n'importe quelle image. Pour ce faire, vous devez redimensionner l'image de 120 x 64 pixels, faire pivoter l'image de 90 degrés dans le sens antihoraire et effectuer une symétrie verticale. Diminuez la luminosité de l'image, car les LED sont très lumineuses. Pour ce faire, il est préférable d'utiliser la correction gamma avec un coefficient de 0,45.
Enregistrer l'image au format BPM 24 bits sans compression. Après toutes les manipulations, le fichier de sortie aura la taille 23094 octets.



