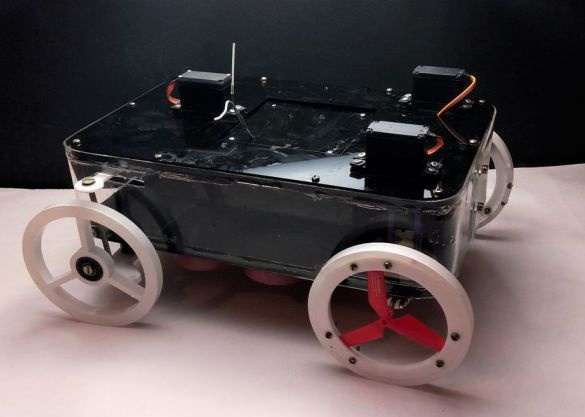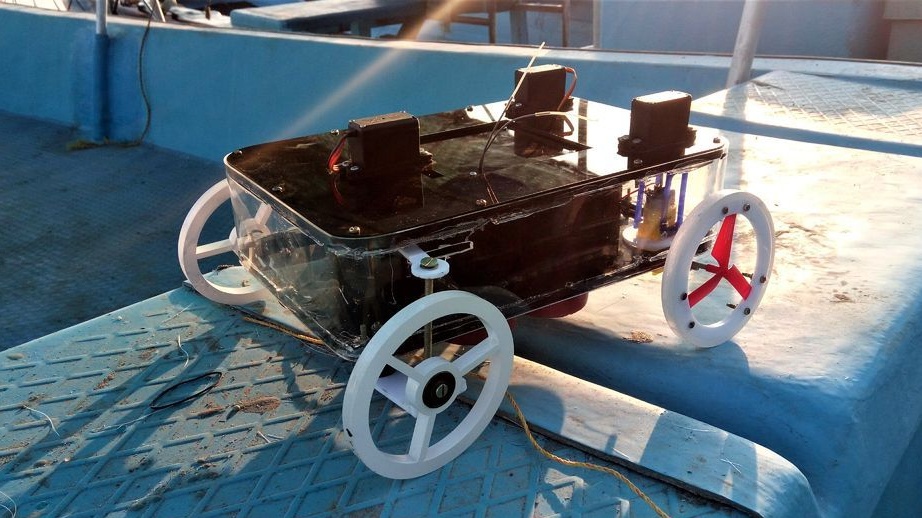



Dans cet article, nous considérerons la fabrication par des artisans indiens d'un véhicule tout terrain se déplaçant à la fois sur terre et sur l'eau. Véhicule tout terrain se compose d'une plate-forme flottante avec des roues et une hélice. Les mécanismes sont contrôlés par télécommande via Arduino UNO.
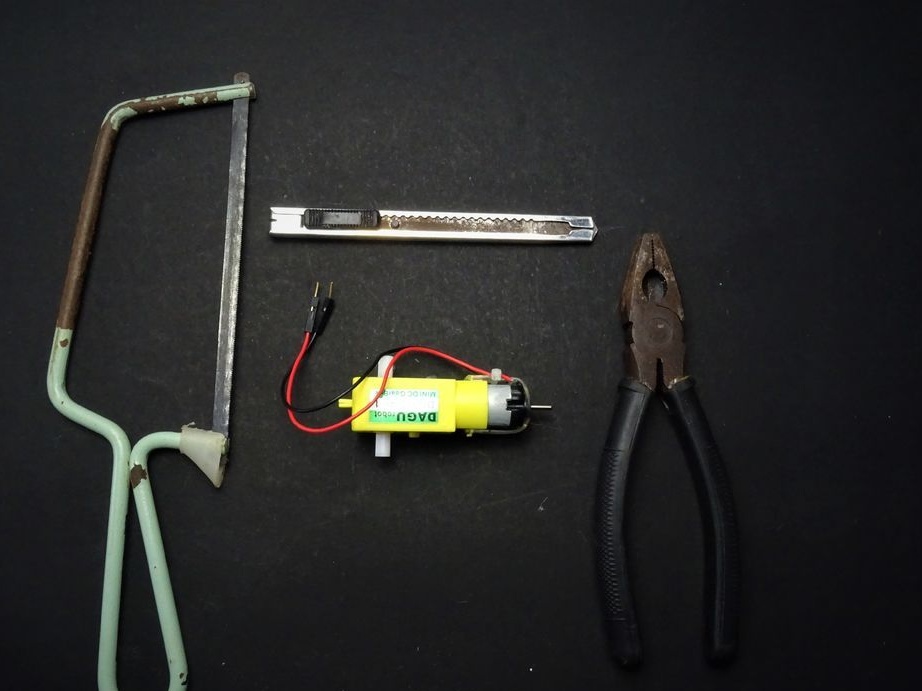
Outils et matériaux:
-
-AKB 9V;
-Switch;
-Acryl;
-Contreplaqué;
(par référence, le roulement est de 8 x 16 x 5 mm, l'auteur indique 8 * 22 mm)
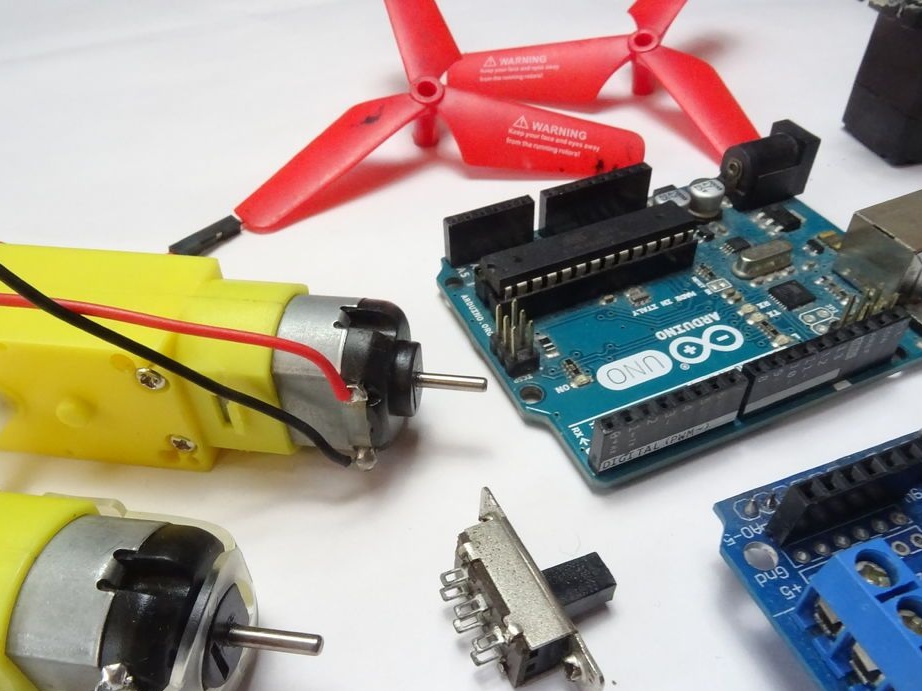
-Deux hélices;
-Fixations;
-Flotteurs;
-Pistolet à colle;
-Super colle;
Résine époxy;
-Fer à souder;
-Drill;
-Coupe laser;
-Saw;
- tournevis;
-Drill;
-Fer à souder;
-Board;
-Ordinateur avec logiciel;


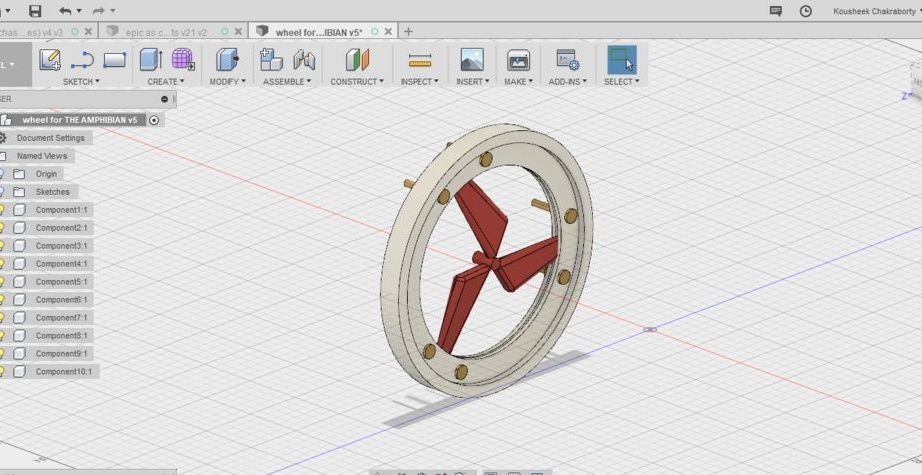
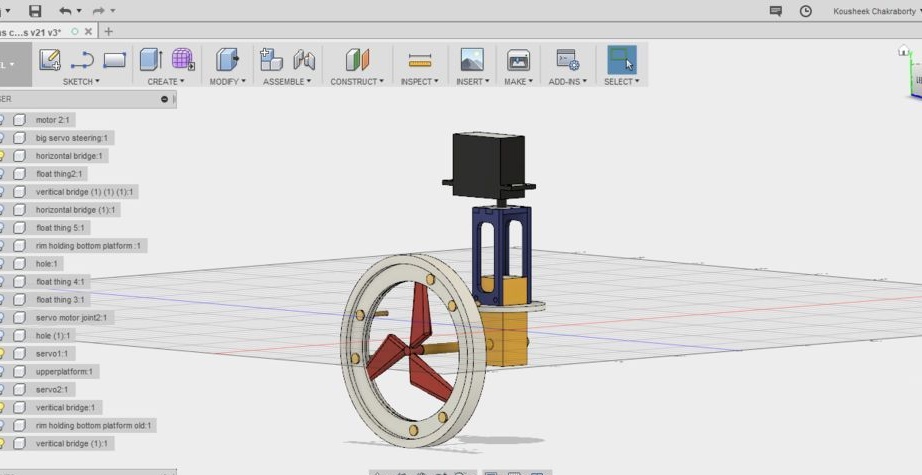
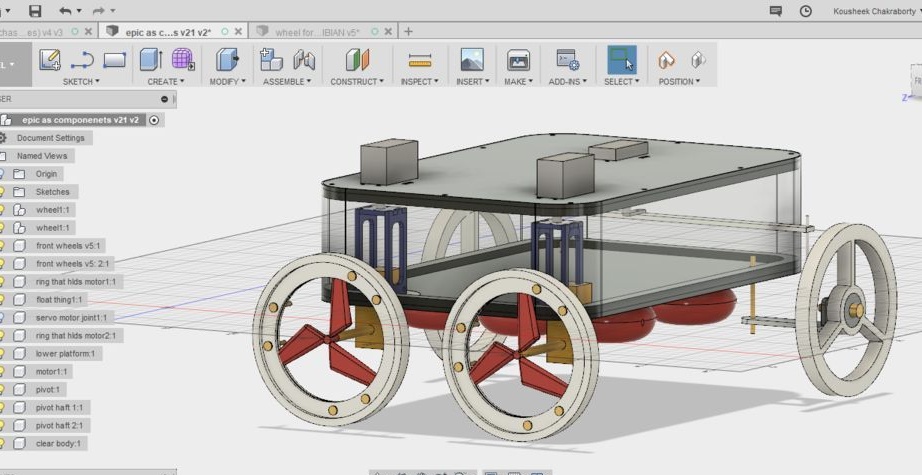
Première étape: conception
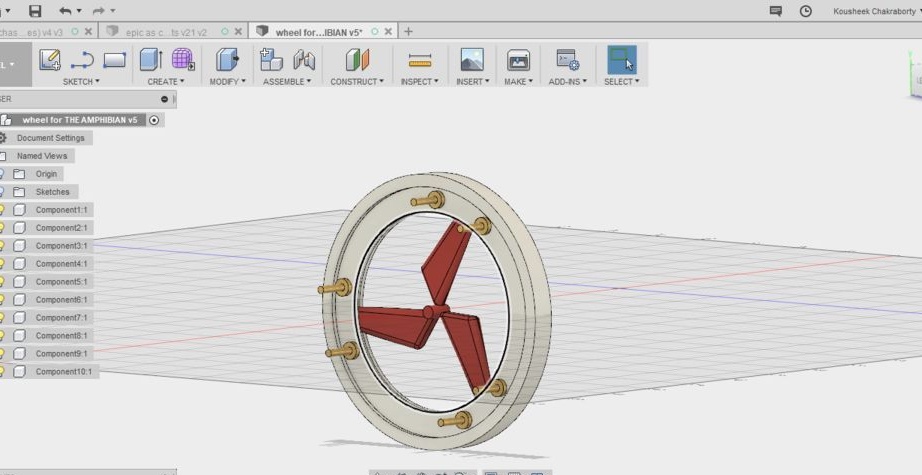
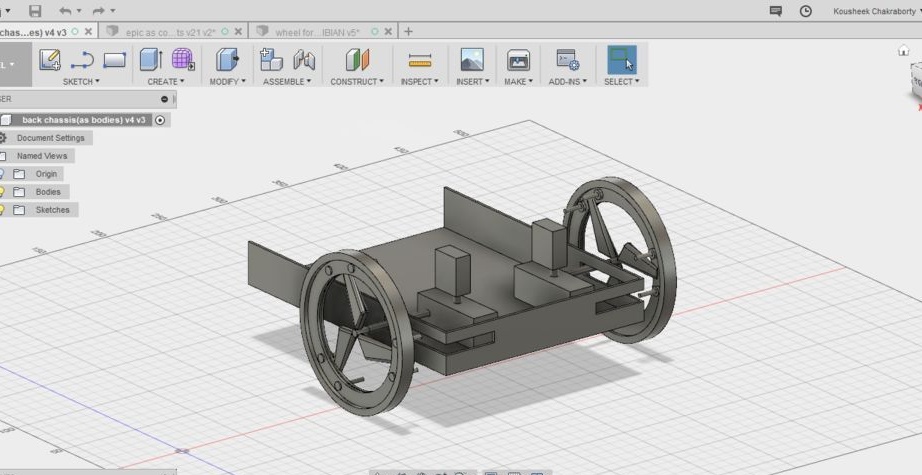
Pour créer le projet, les maîtres ont utilisé le programme Fusion 360. Toute la difficulté était de combiner le mouvement sur terre et dans l'eau. Lors de la conception des roues, les maîtres ont développé un système dans lequel les vis s'ouvraient dans l'eau, mais compte tenu de la complexité de la conception, ils ont simplement intégré les hélices du jouet pour enfants à l'intérieur de la roue. Cela permet aux roues de déplacer le véhicule tout-terrain sur terre, et lorsqu'elles entrent dans l'eau, les vis sont serrées.
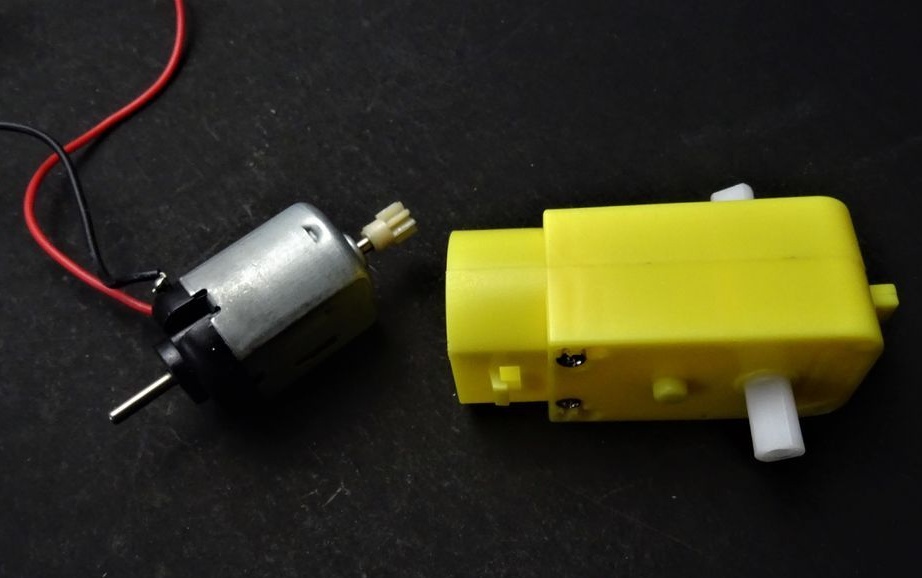
Pour mettre en œuvre cette idée, vous devez pouvoir faire tourner les roues arrière perpendiculairement au véhicule tout-terrain lorsque vous conduisez sur l'eau. Cela est devenu possible lorsque les engrenages du moteur ont été retirés du cadre. Les boîtes de vitesses en plastique et l'eau qui y pénètre ne nuiront pas.
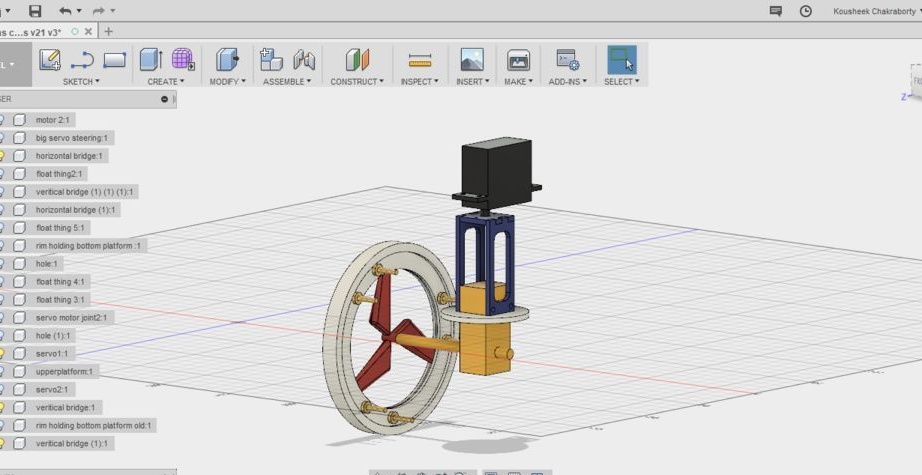
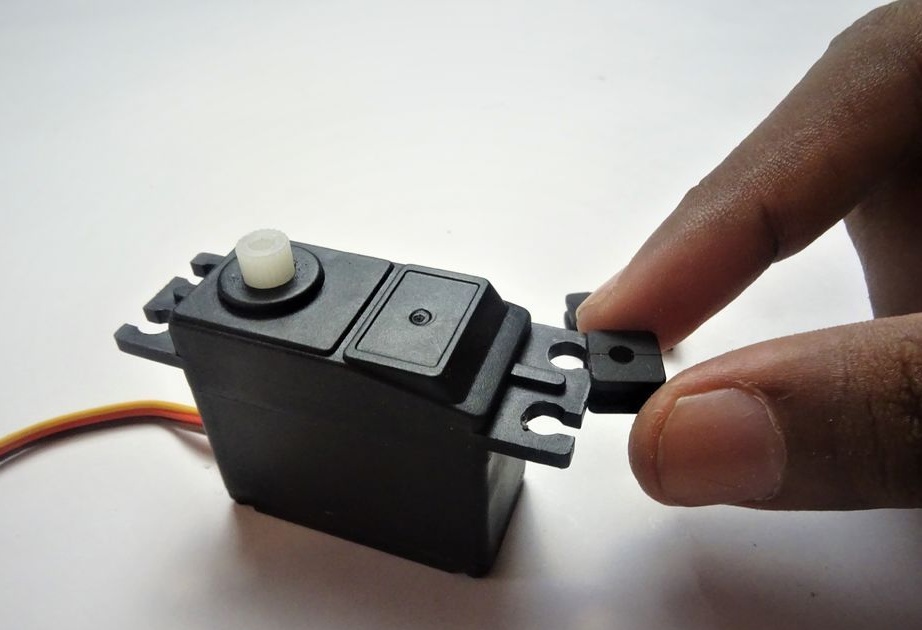
La rotation des vis de roue sera effectuée à l'aide d'un servomoteur.
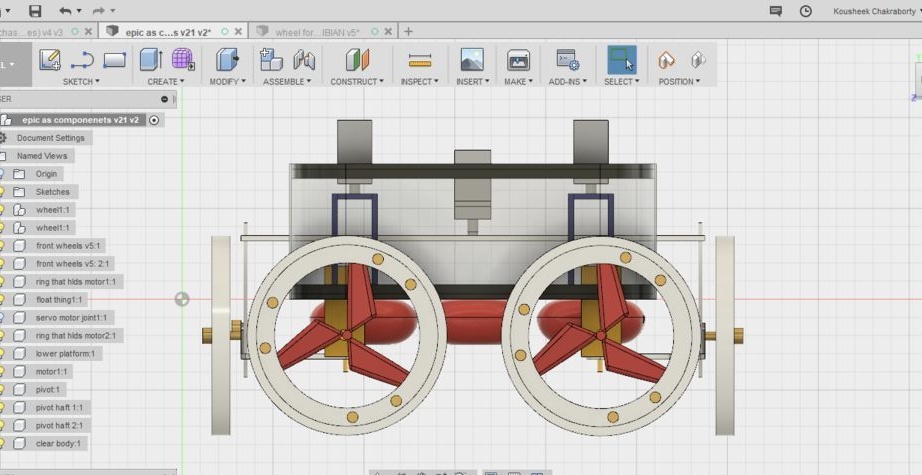
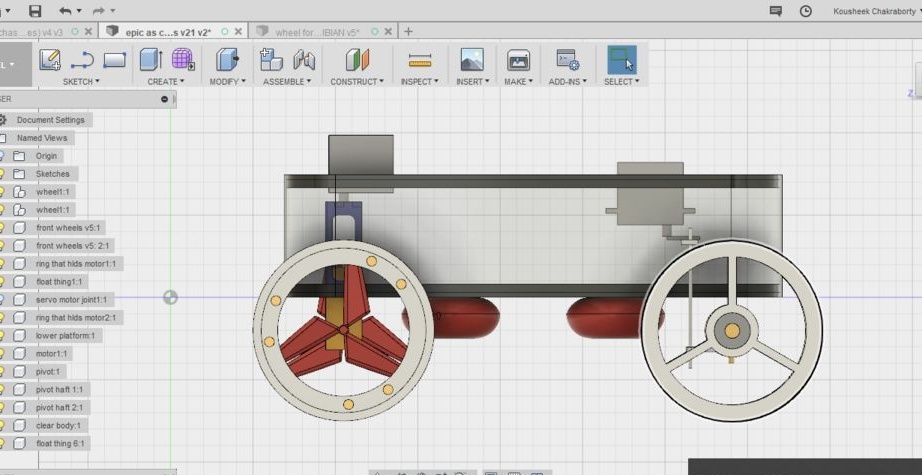
Le véhicule tout-terrain possède deux mécanismes de virage. L'un pour contrôler les roues arrière des hélices dans l'eau, et le second pour conduire par voie terrestre contrôle les roues avant. L'angle de rotation des roues avant est de 35 degrés, ce qui vous permet de faire des virages serrés.
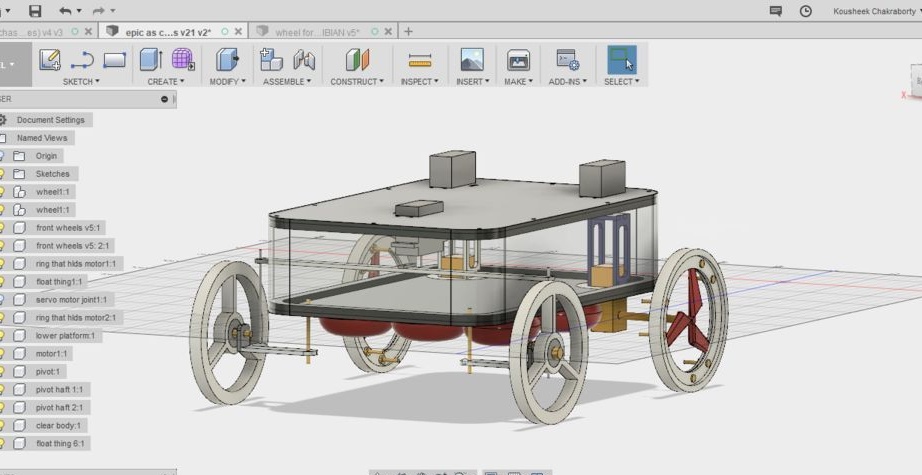
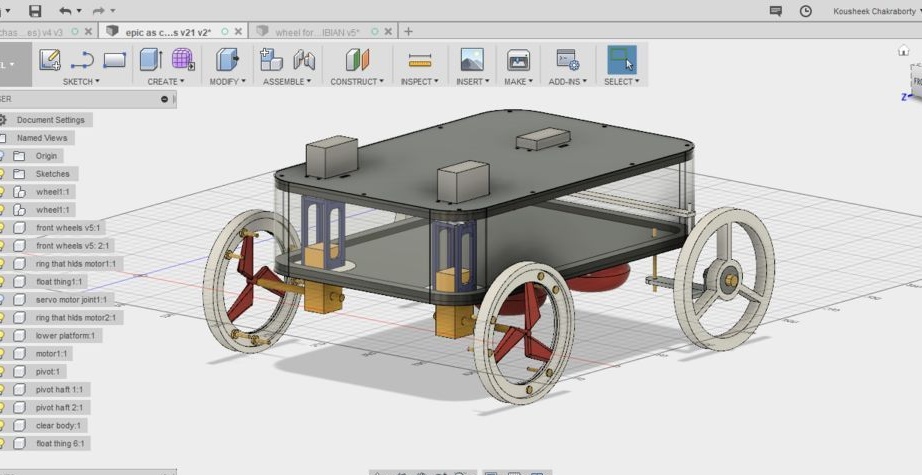
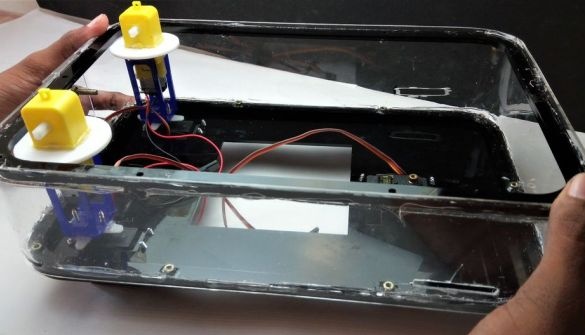
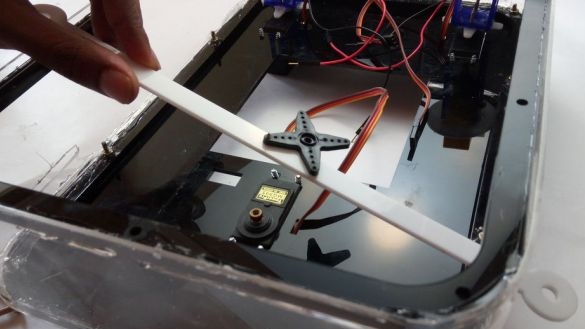
Dans les images ci-dessous, vous pouvez voir la transformation du véhicule tout-terrain lors de vos déplacements sur terre et sur l'eau.
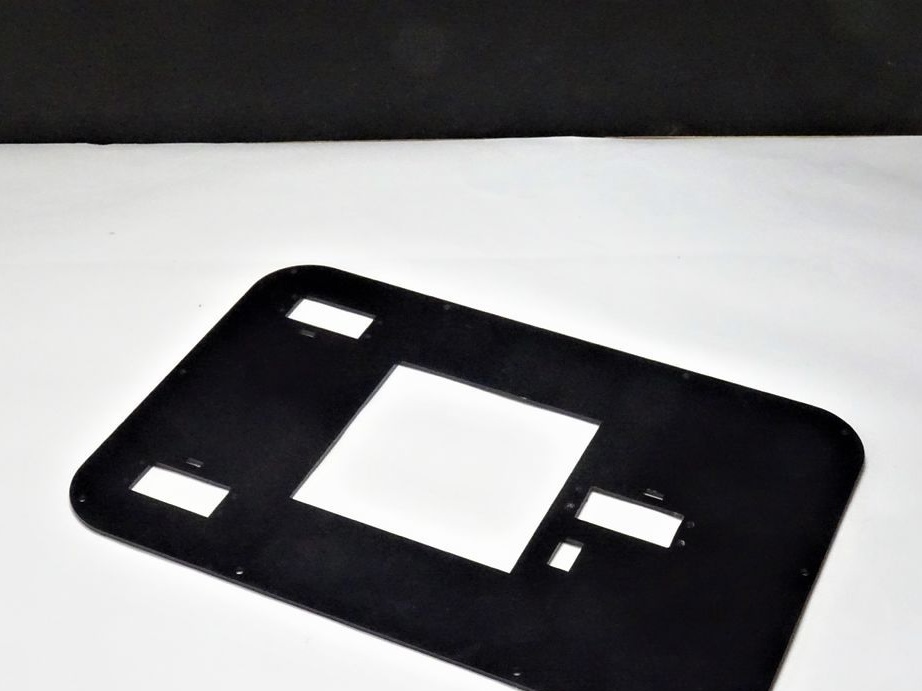
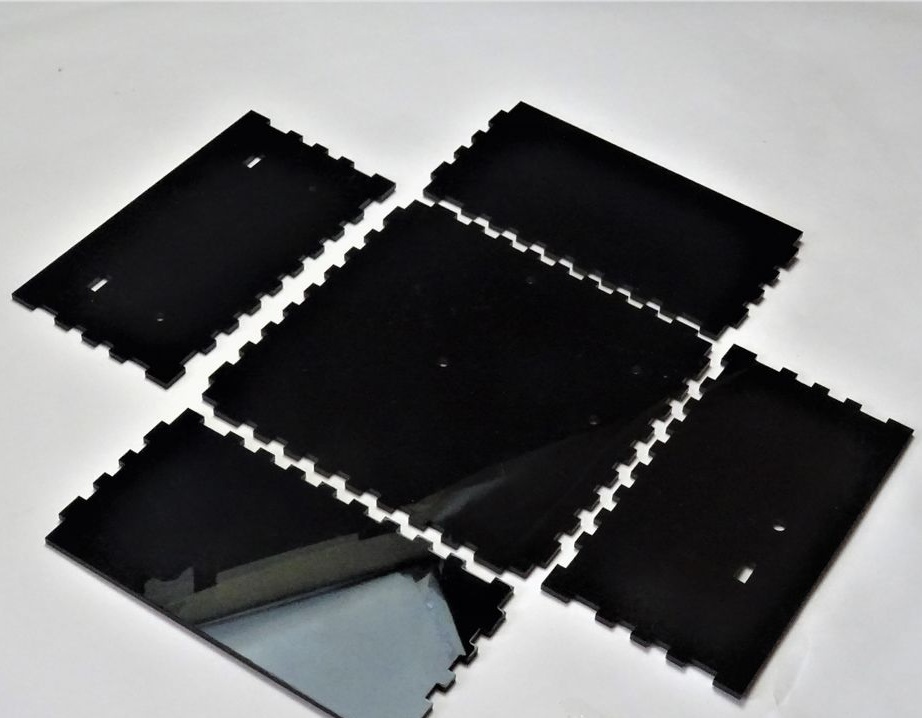
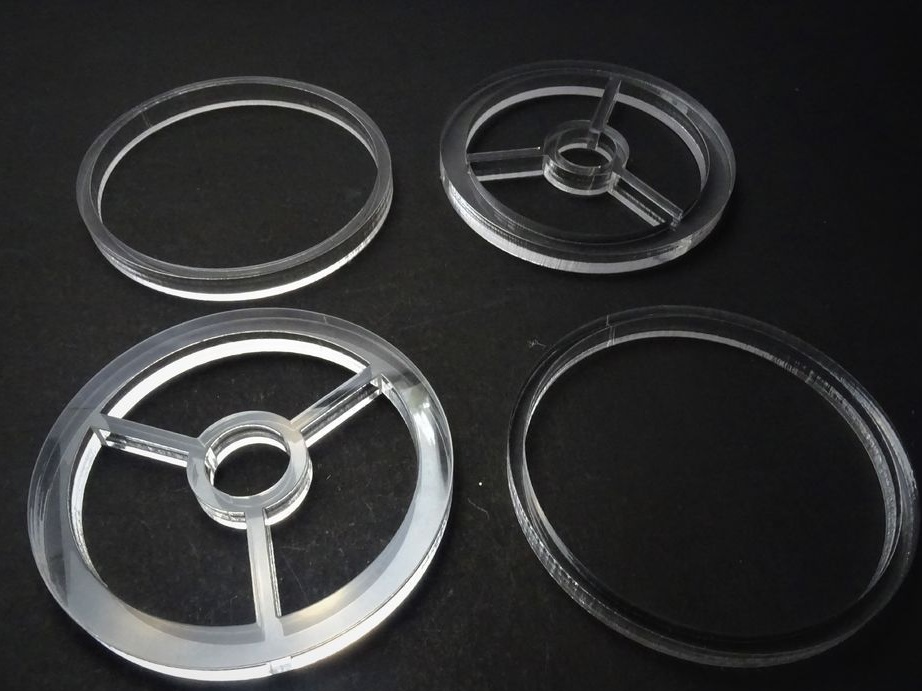
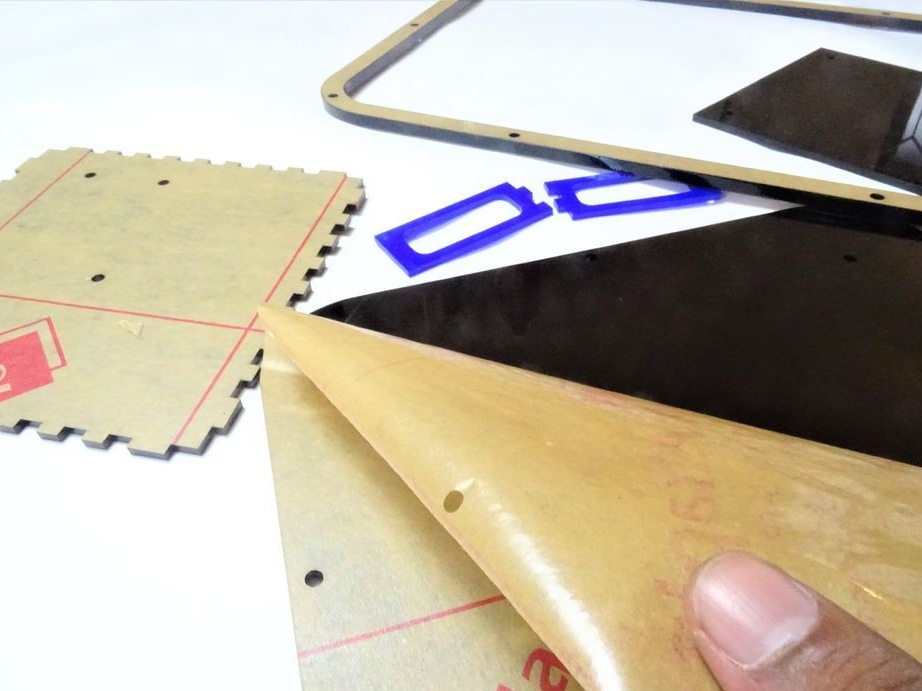
Deuxième étape: découpe laser
Pour le véhicule tout-terrain, le maître a utilisé de l'acrylique de différentes épaisseurs et couleurs.
Couche de finition noire 3 mm x 1
Couche inférieure noire 3 mm x 1
Cadre latéral noir 5 mm x 2
Paroi latérale transparente 2 mm x 1
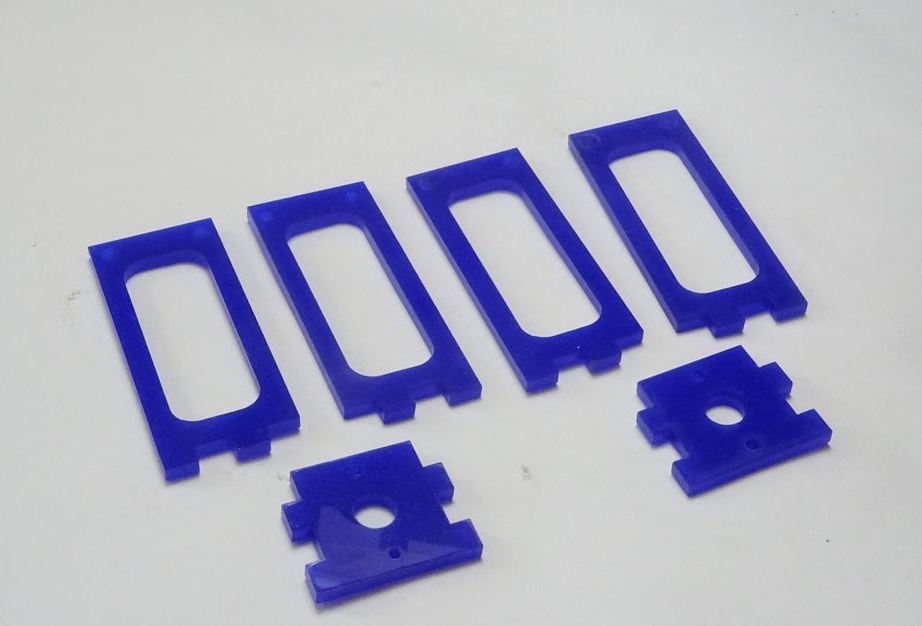
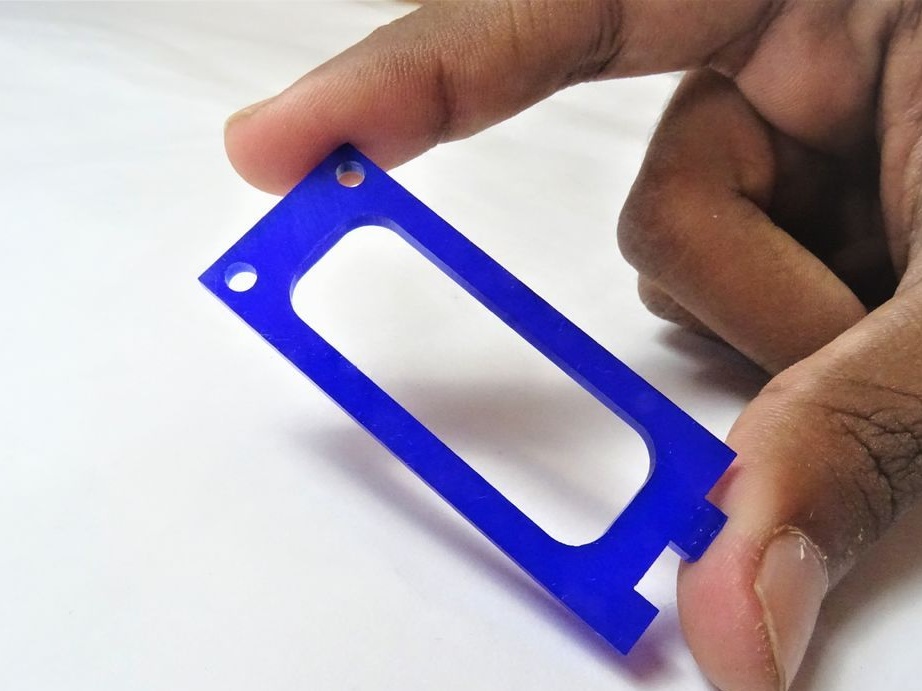
Côté puissance bleu 3 mm x 4
Pièce supérieure de pont Bleu 3 mm x 2
Disque moteur blanc 3 mm x 2
Roue avant blanche 10 mm x 2
Jante intérieure (roue arrière) Blanc 3 mm x 4
Jante extérieure (roue arrière) Blanc 10 mm x 2
Direction Blanc 3 mm x 1
Armoire à tiroirs Noir 3 mm x 1
Couvercle de compartiment noir 3 mm x 1
Arbre moteur arrière Blanc 3 mm x 2
Panneau avant blanc 5 mm x 2



Vous pouvez télécharger le fichier pour la CNC à partir du lien.
Laser Cutting Rover Parts.zip
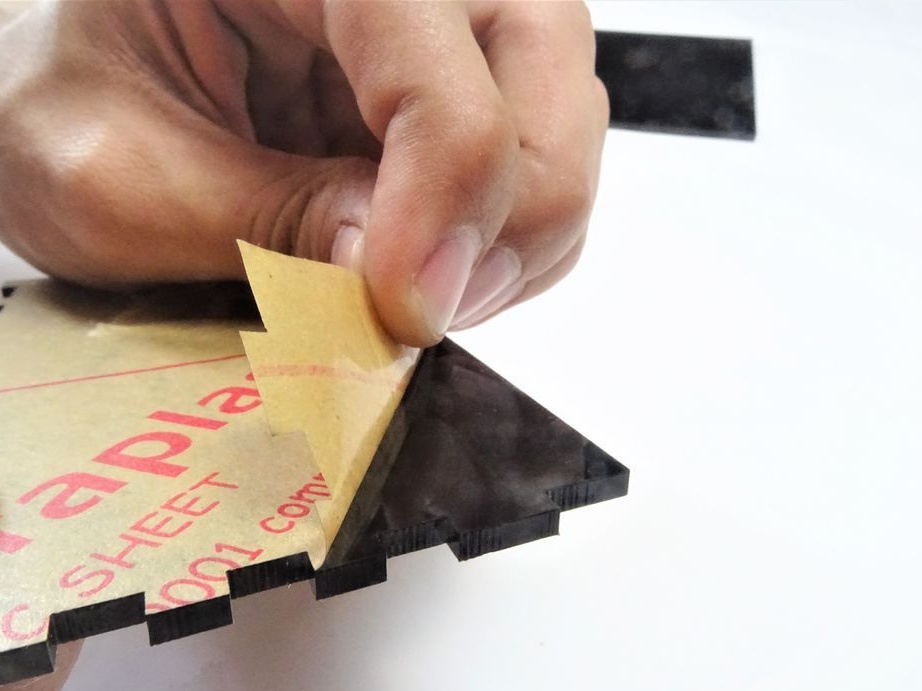
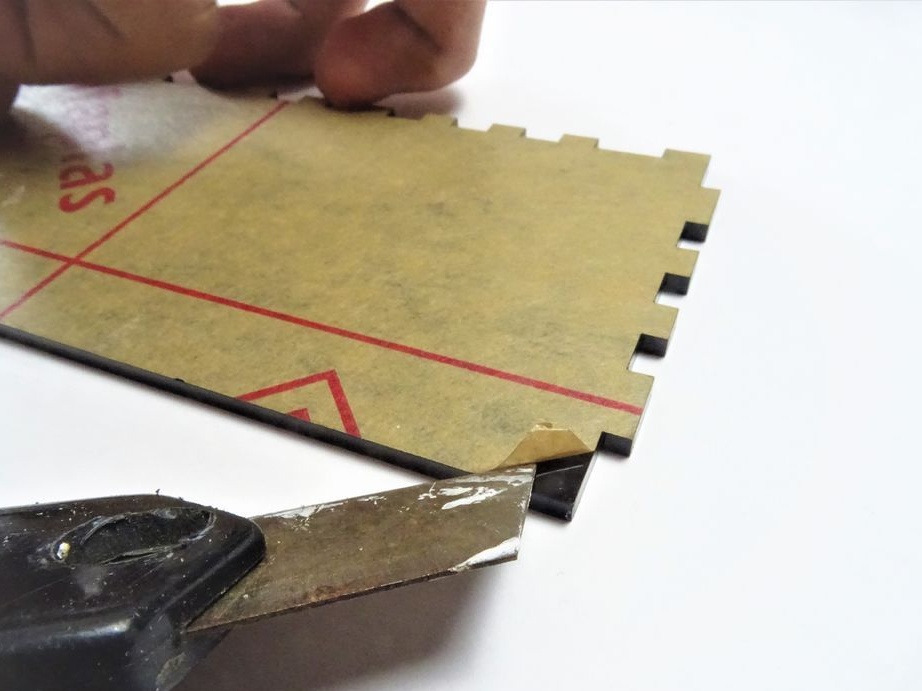
Après avoir fabriqué les pièces, enlève la couche de protection.
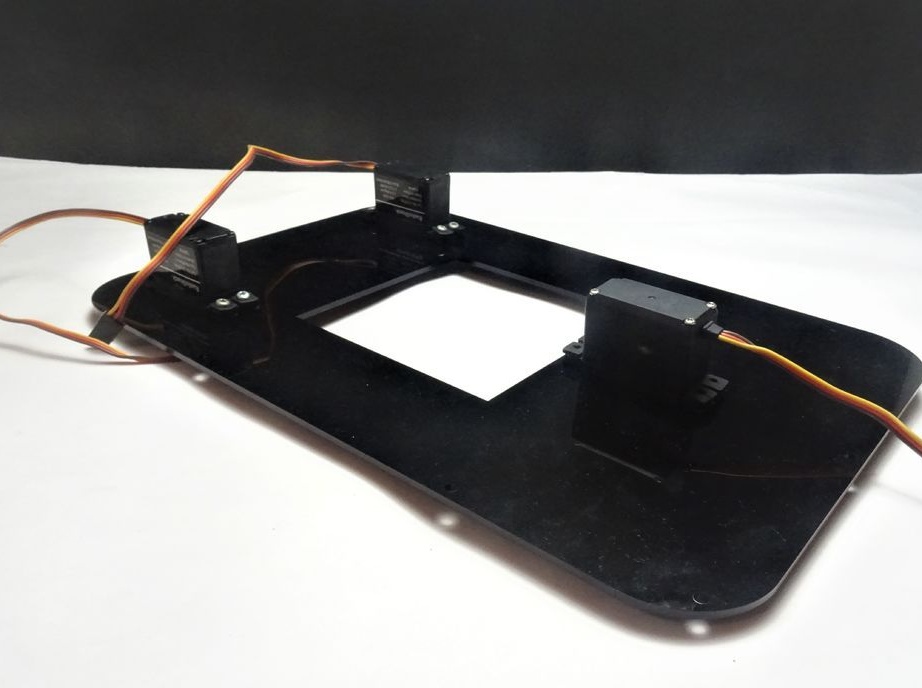
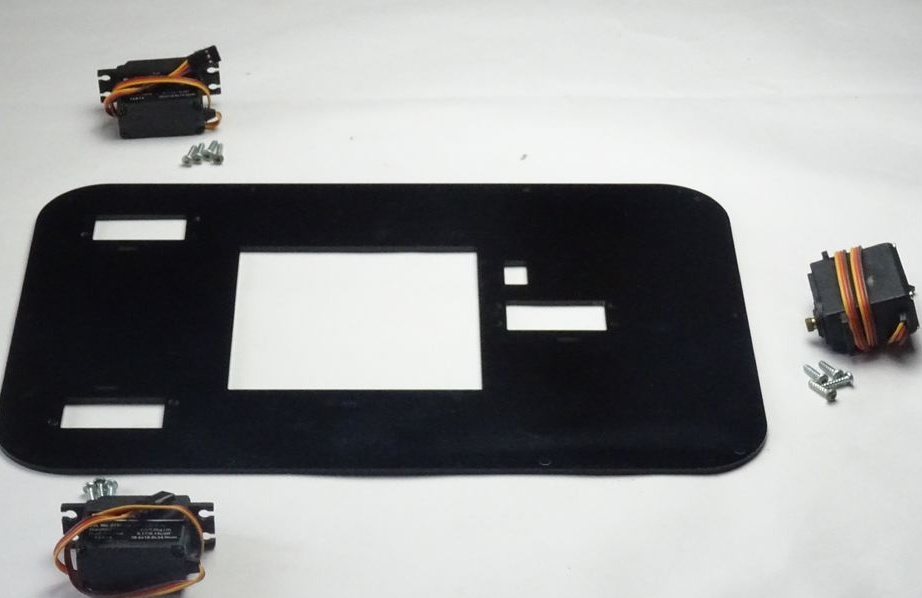
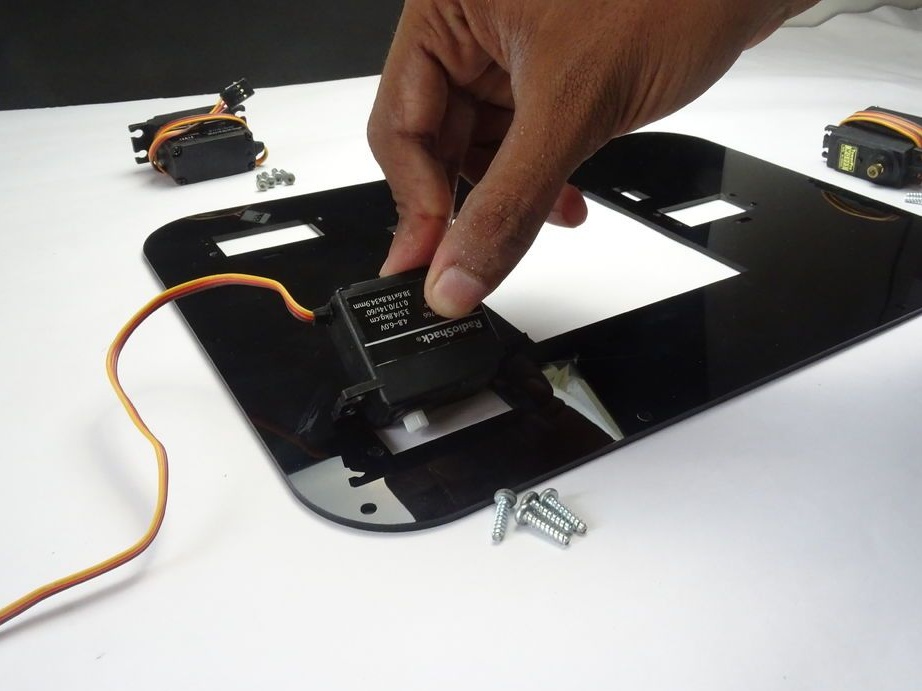
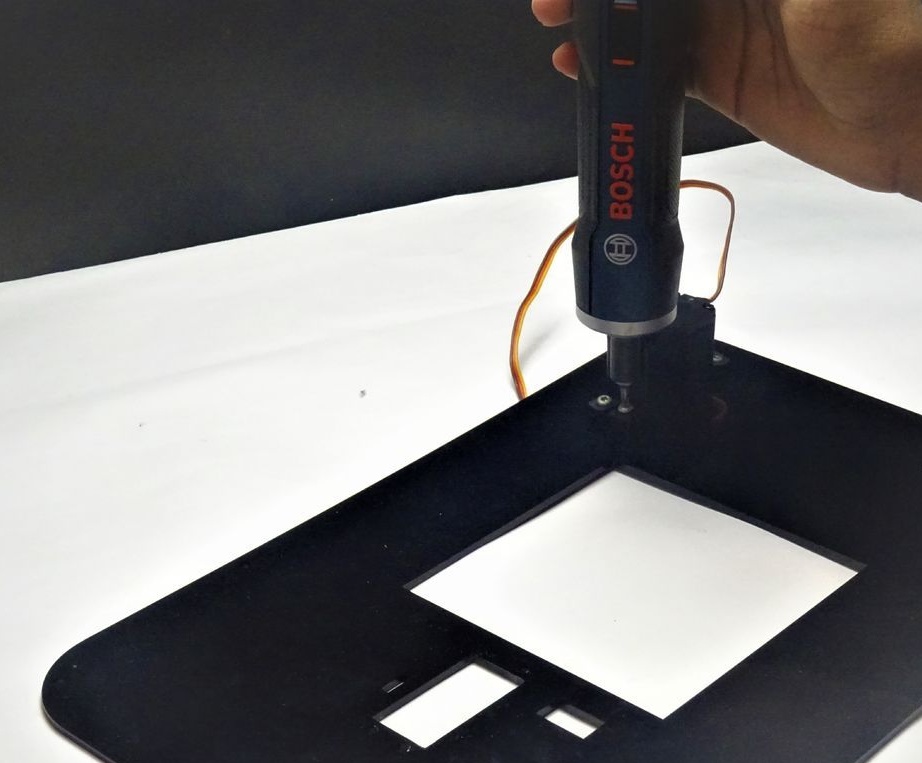
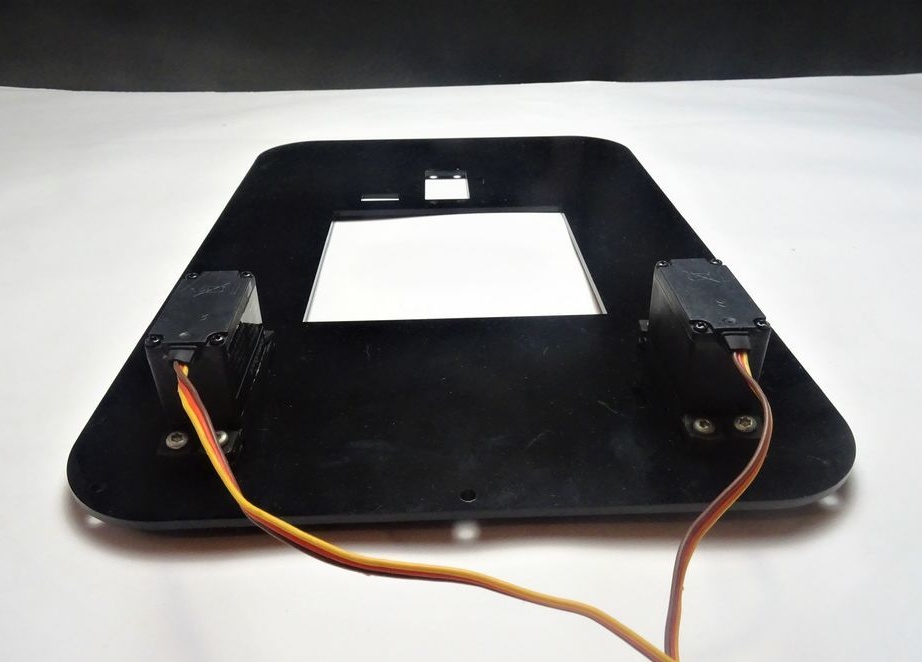
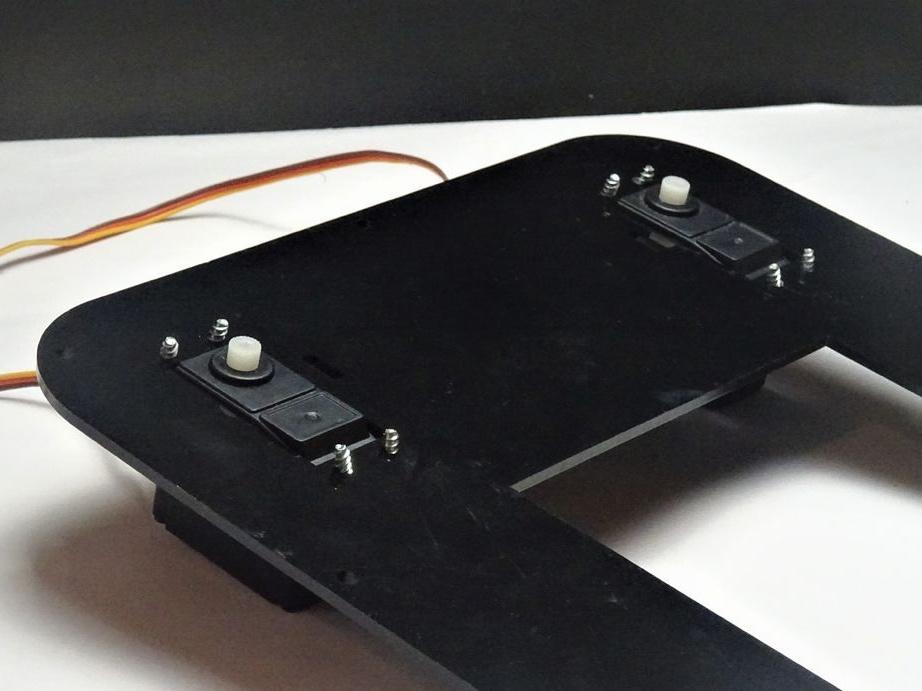
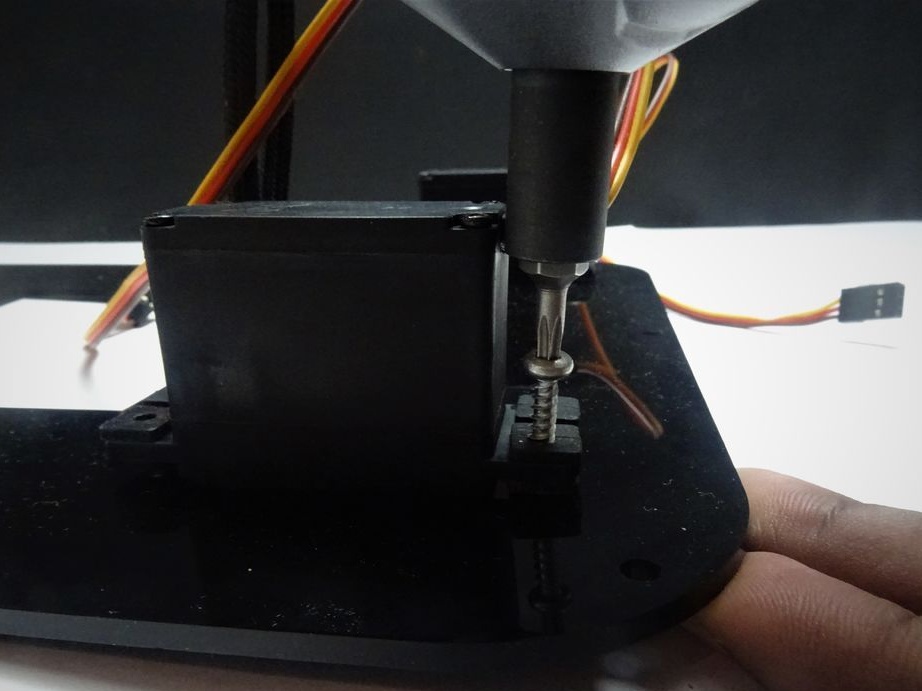
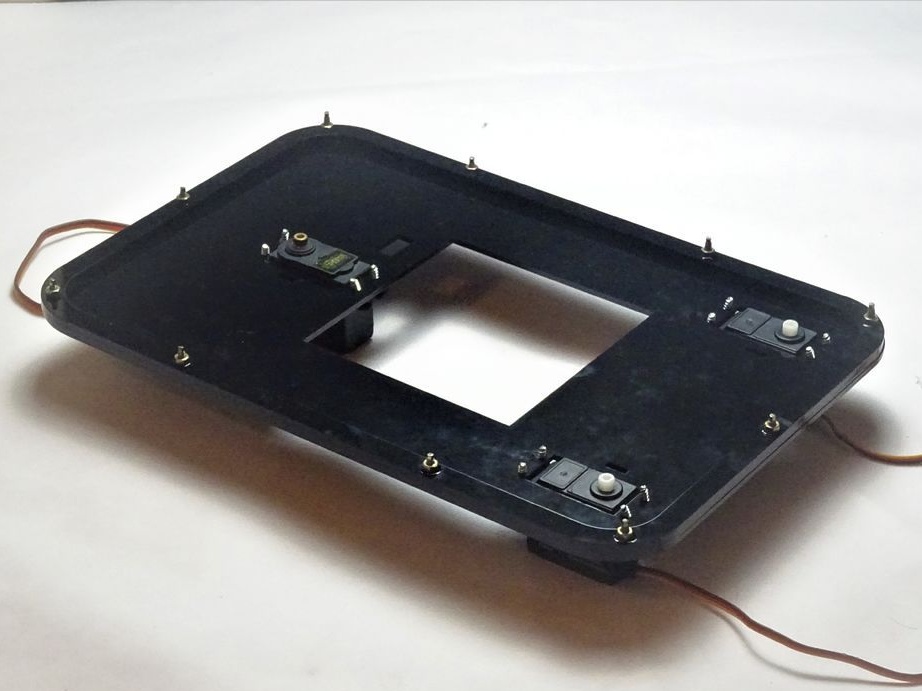
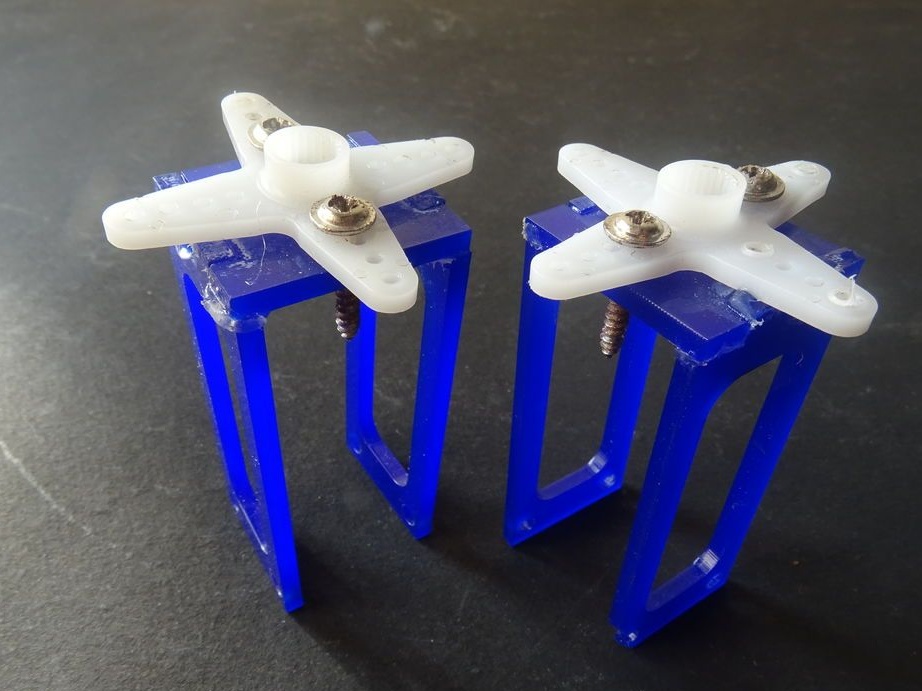
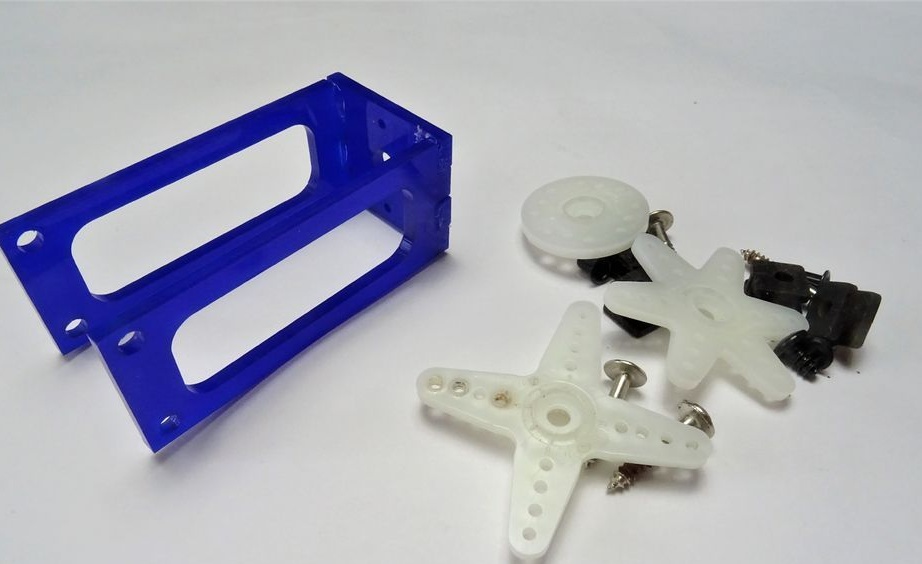
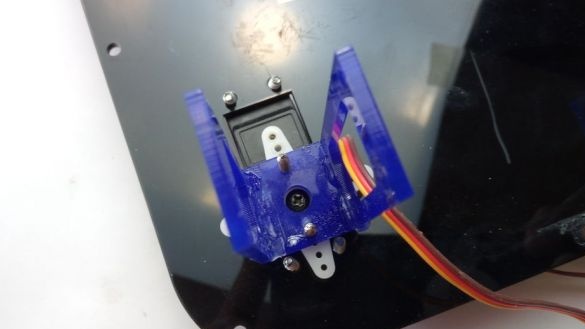
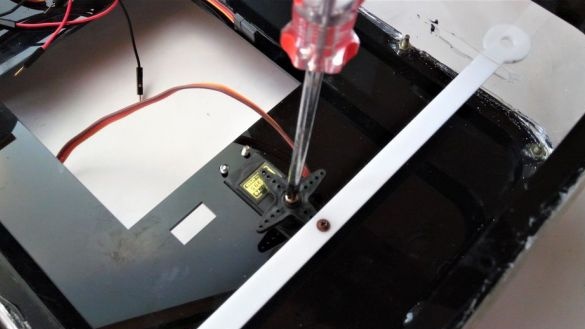
Troisième étape: installer les servomoteurs
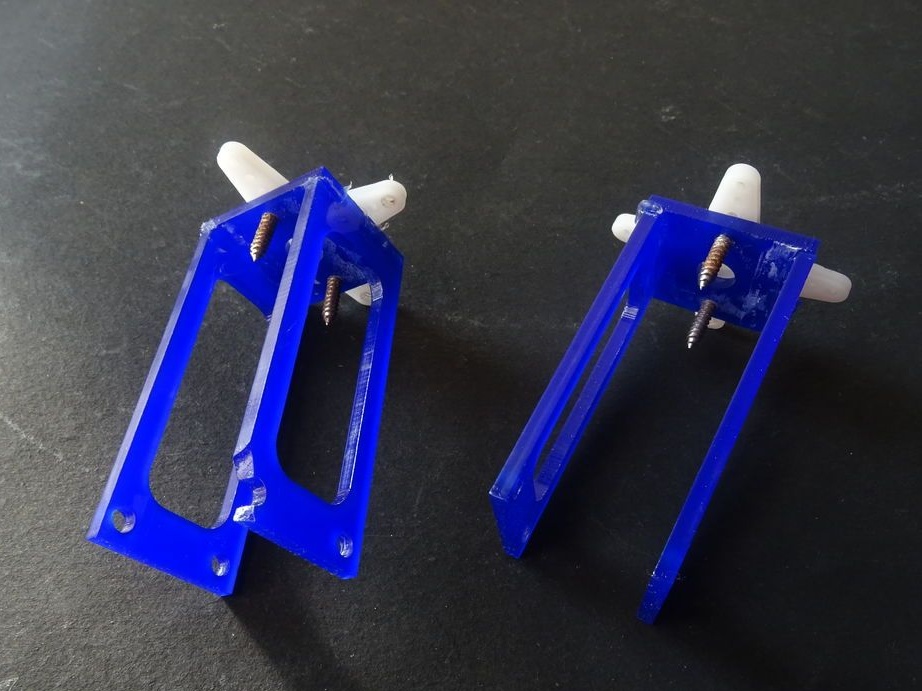
Les trois servomoteurs sont vissés sur la plate-forme. Deux à l'arrière et un à l'avant.

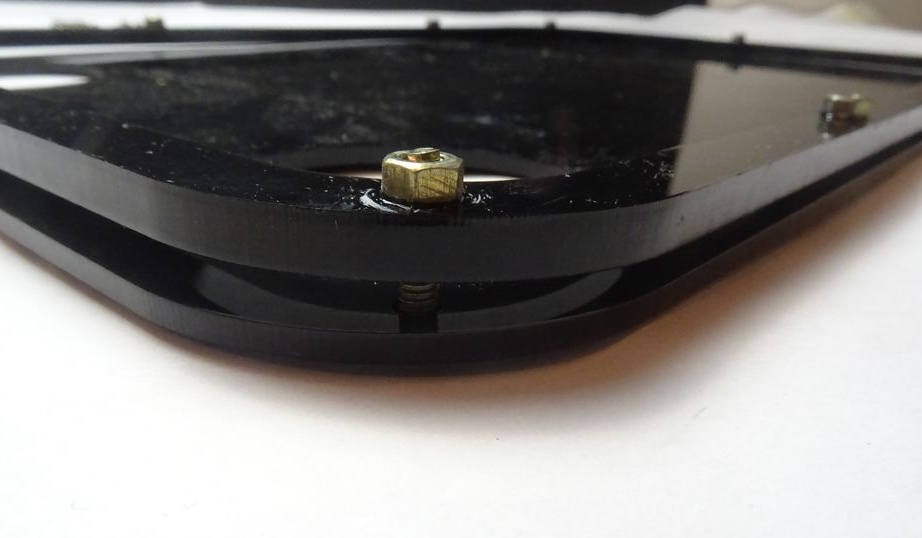
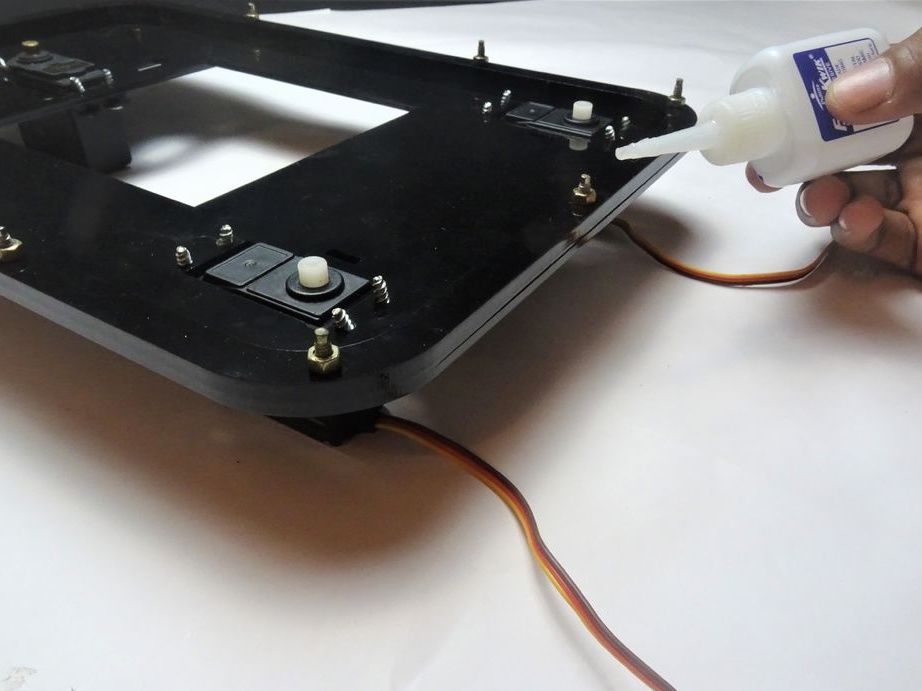
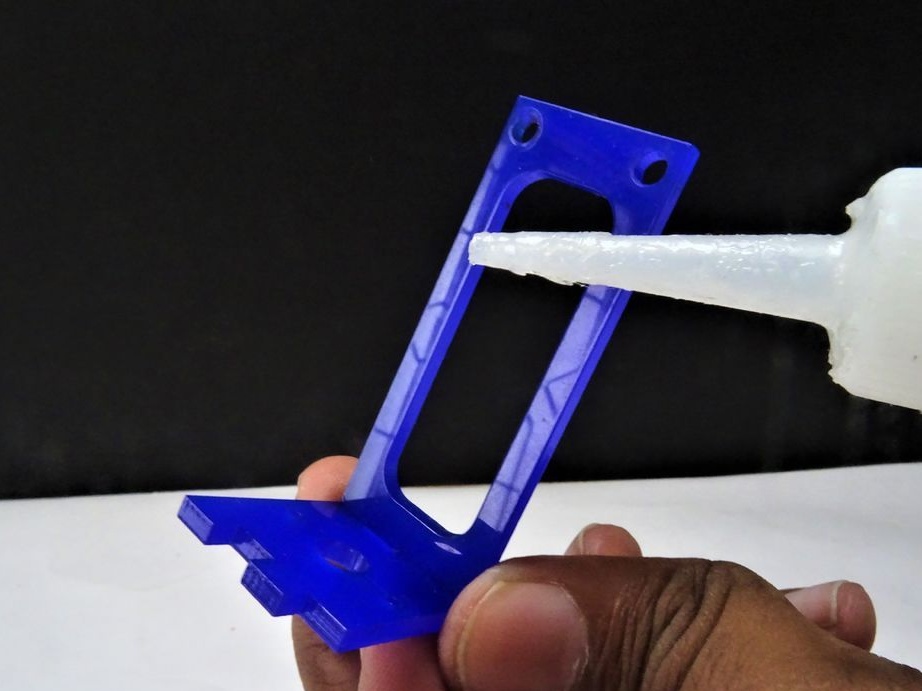
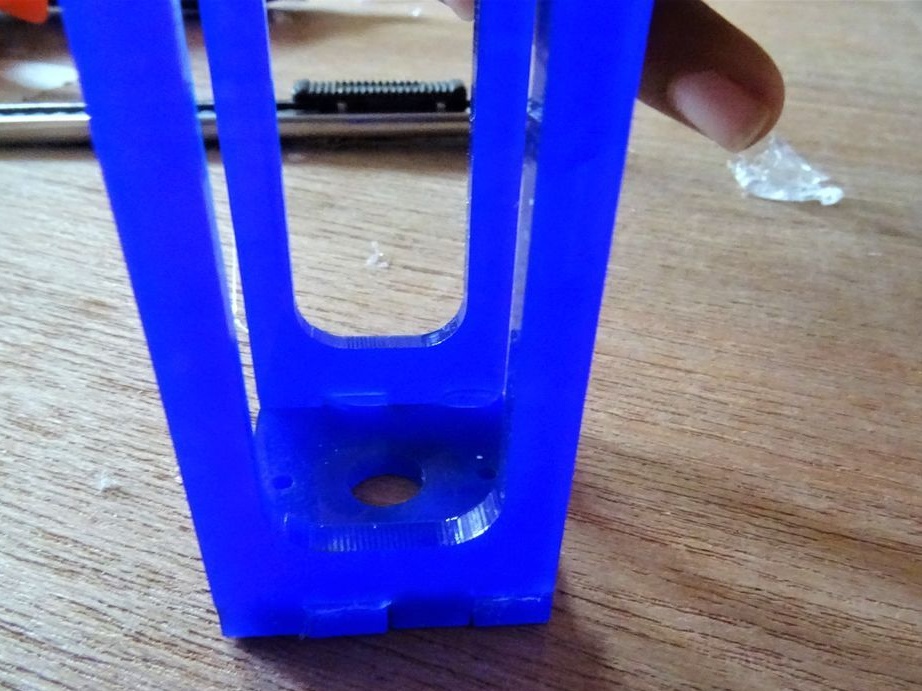
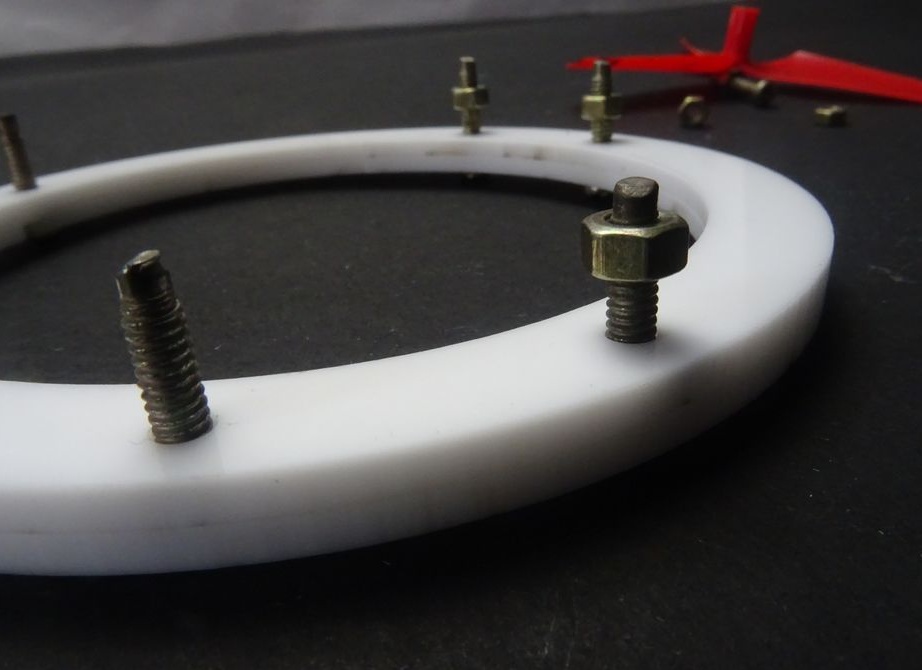
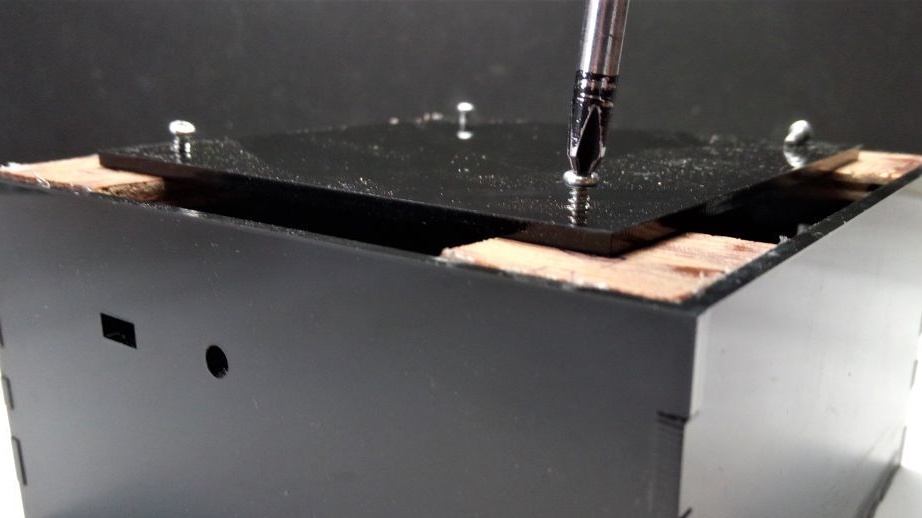
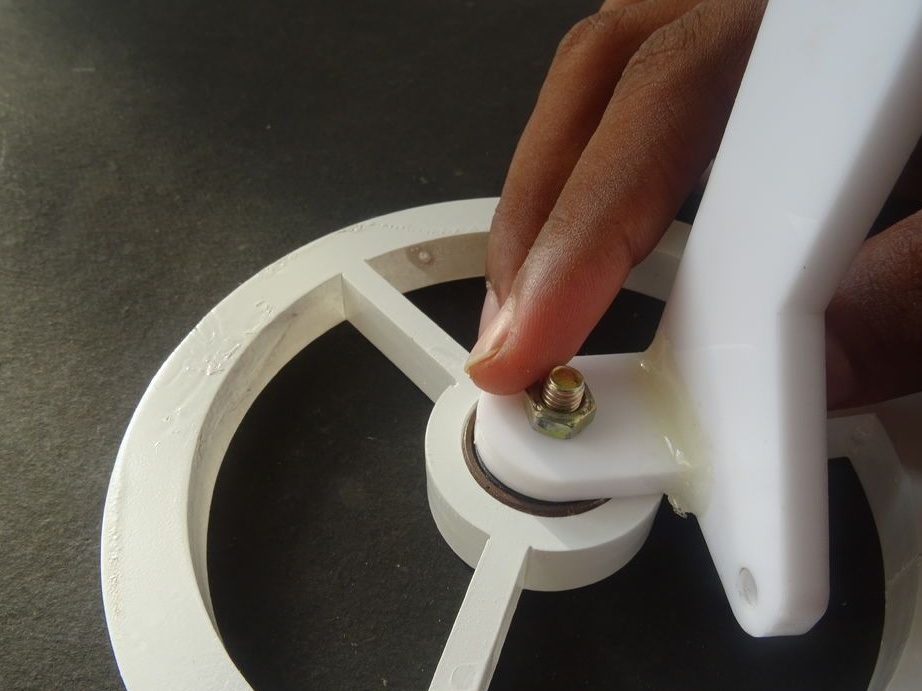
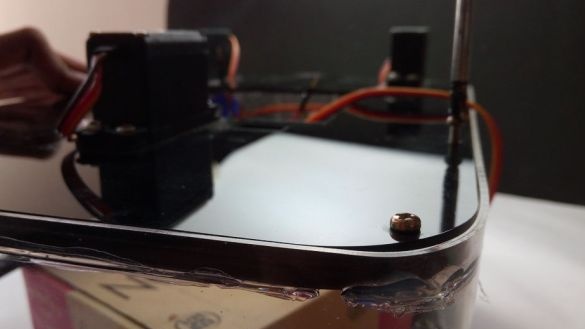
Quatrième étape: les noix
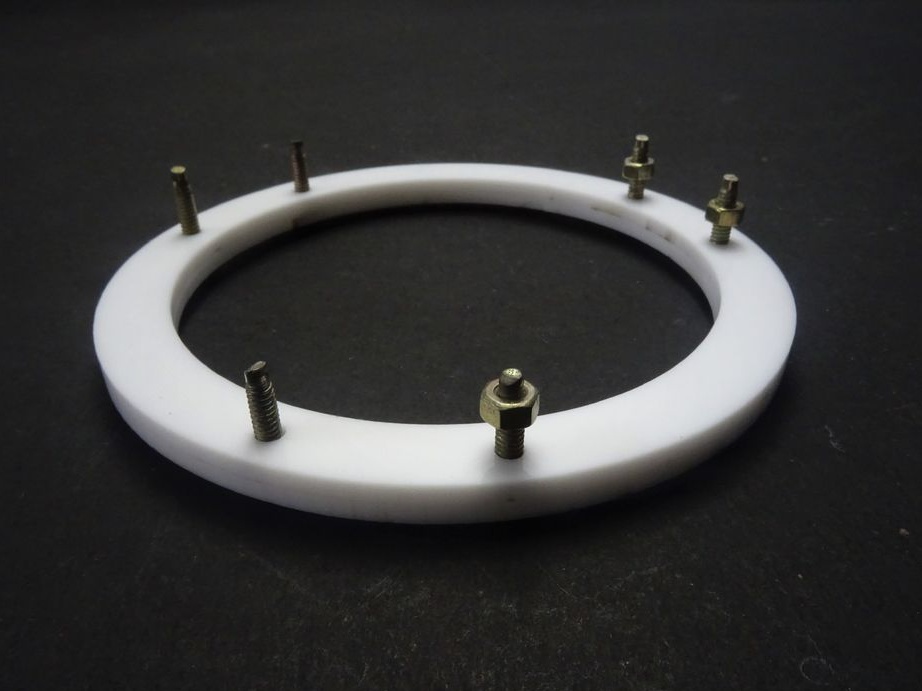
Pour accéder aux mécanismes, les parties supérieure et inférieure sont boulonnées ensemble. Colle les écrous sur la super-colle au cadre, puis la renforce avec de l'époxy.


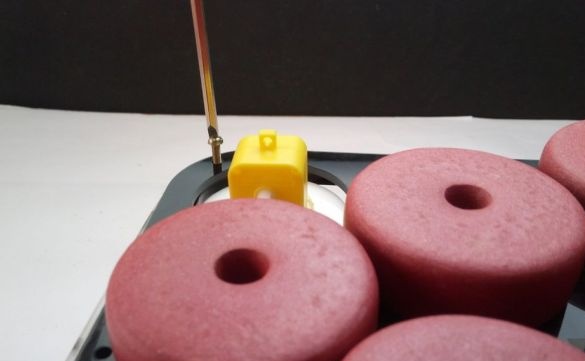
Cinquième étape: flotteurs
La colle flotte.



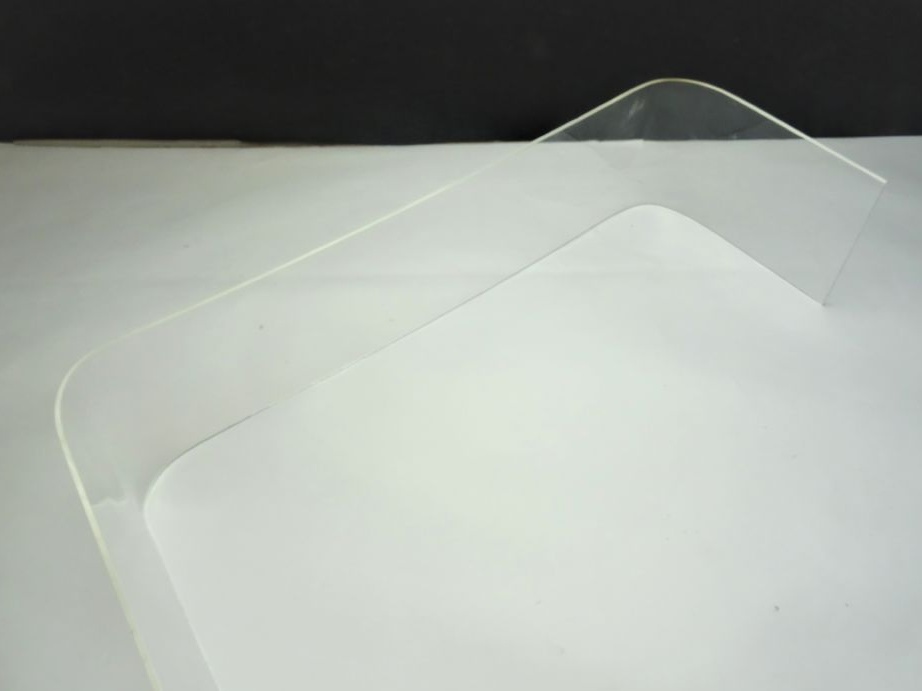
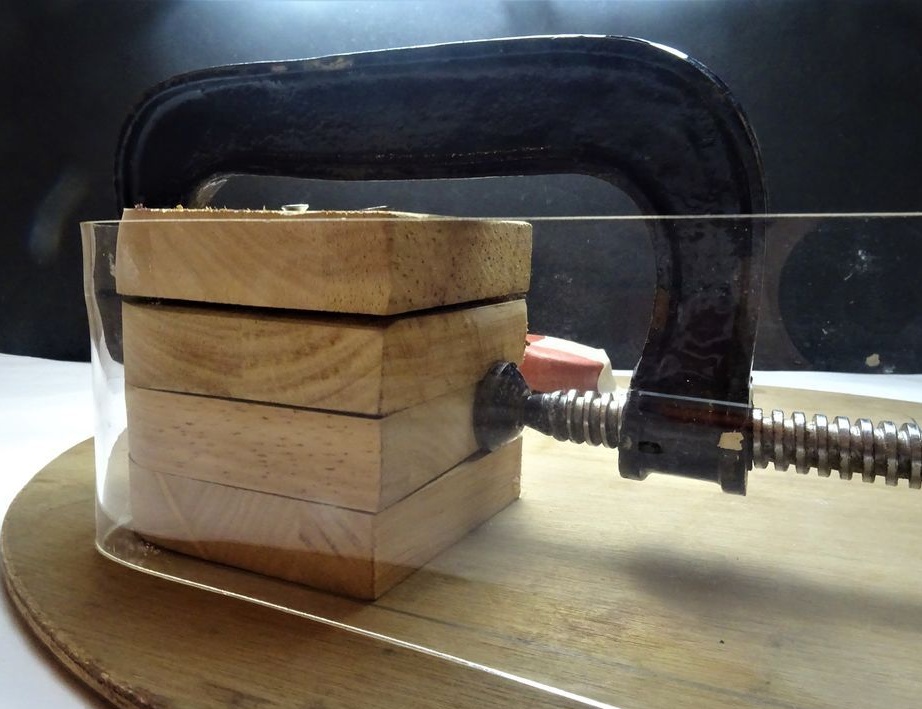
Étape six: façonner l'acrylique
Pour plier l'acrylique, un artisan fait un modèle en bois.



Il serre la pièce avec une pince et, en la chauffant avec un sèche-cheveux, donne à la pièce la forme souhaitée.





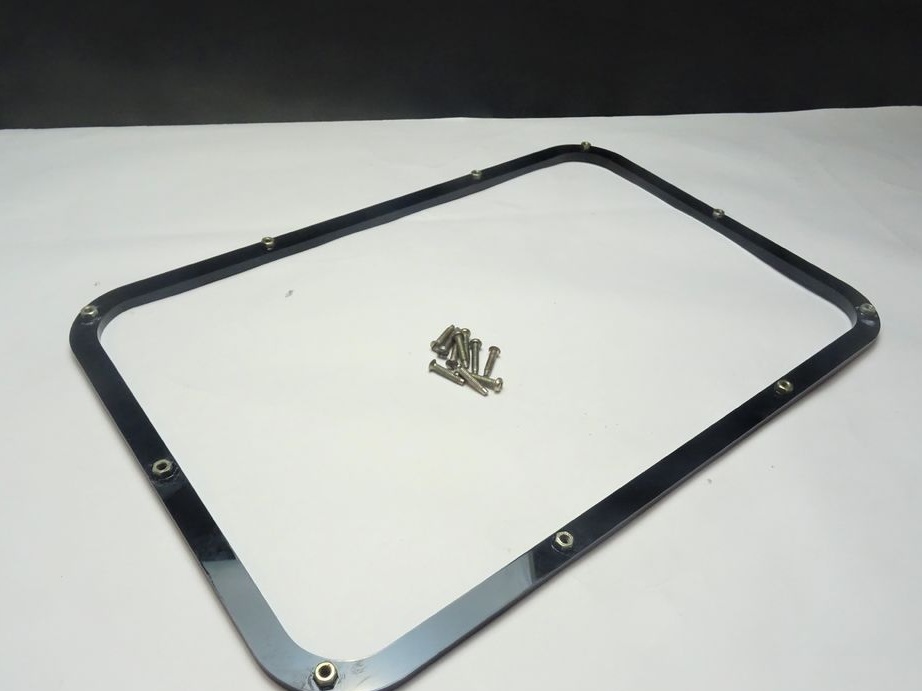
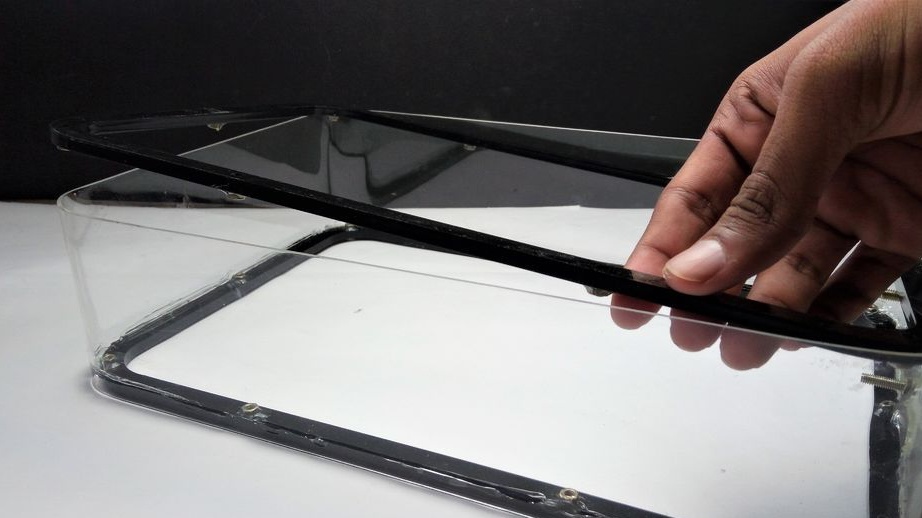
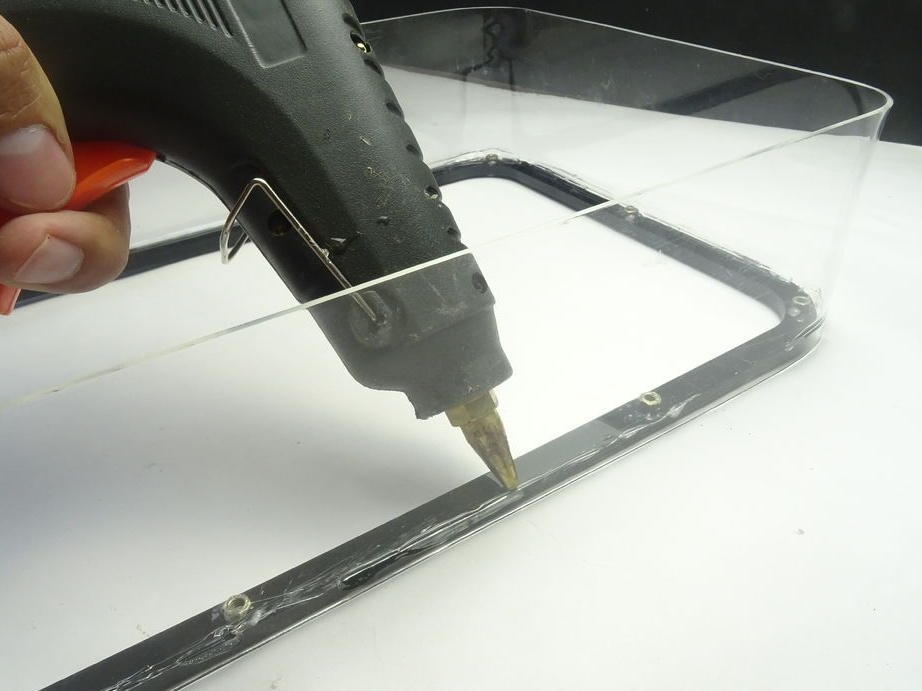
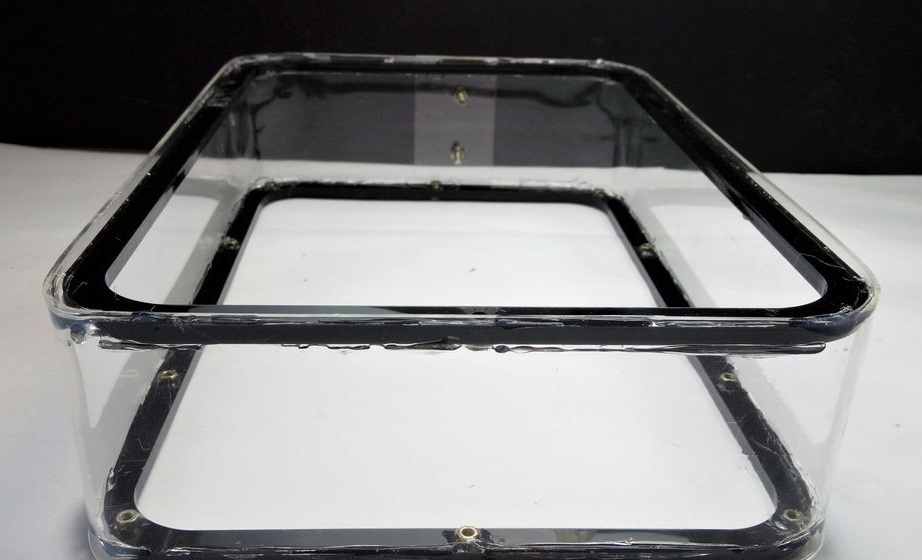
Septième étape: cadre
Colle les cadres supérieur et inférieur au corps transparent. Les coutures sont soigneusement scellées avec de la colle chaude.







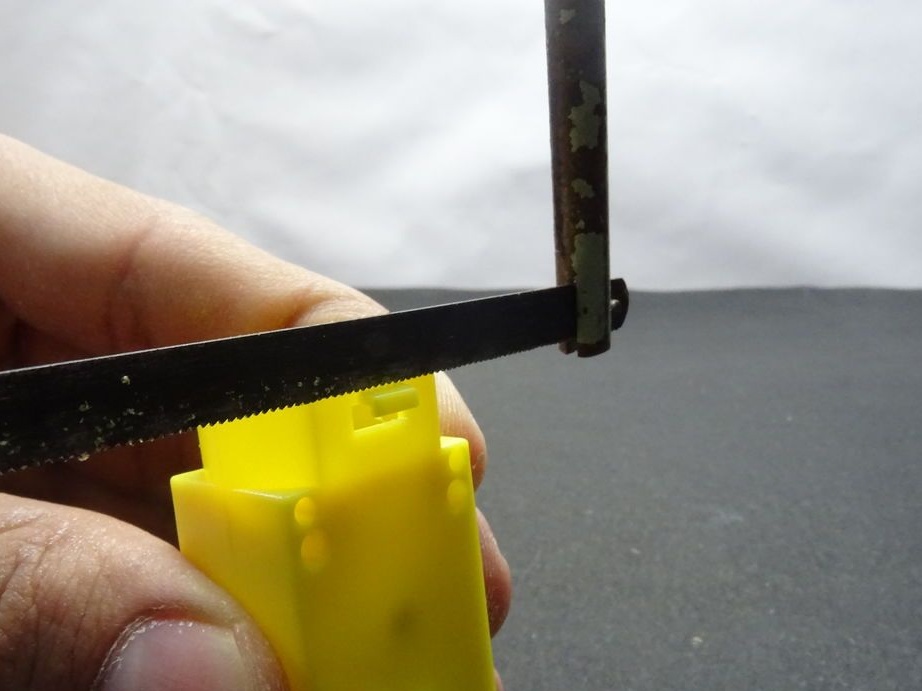
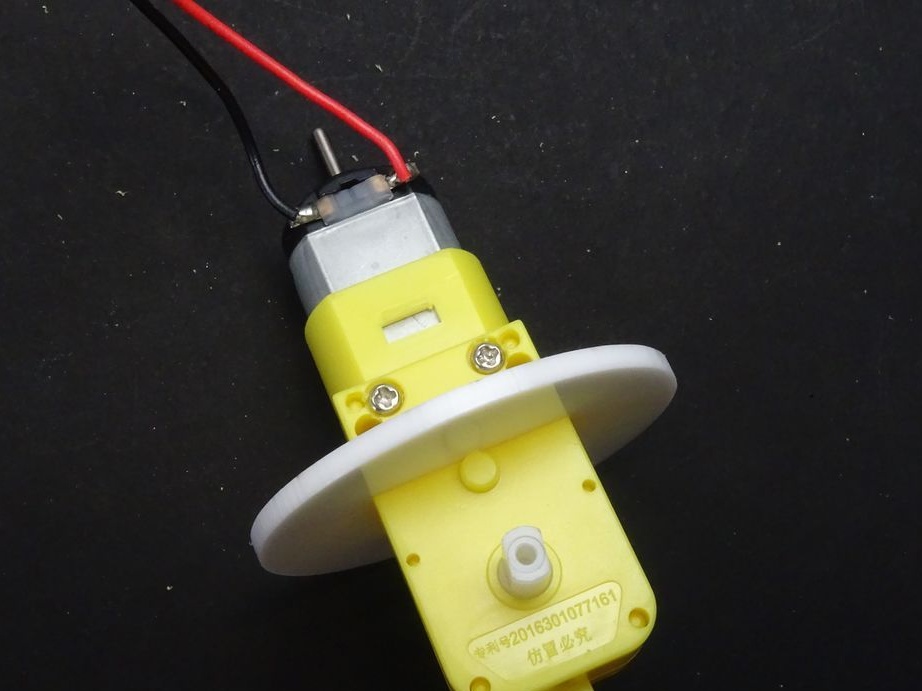
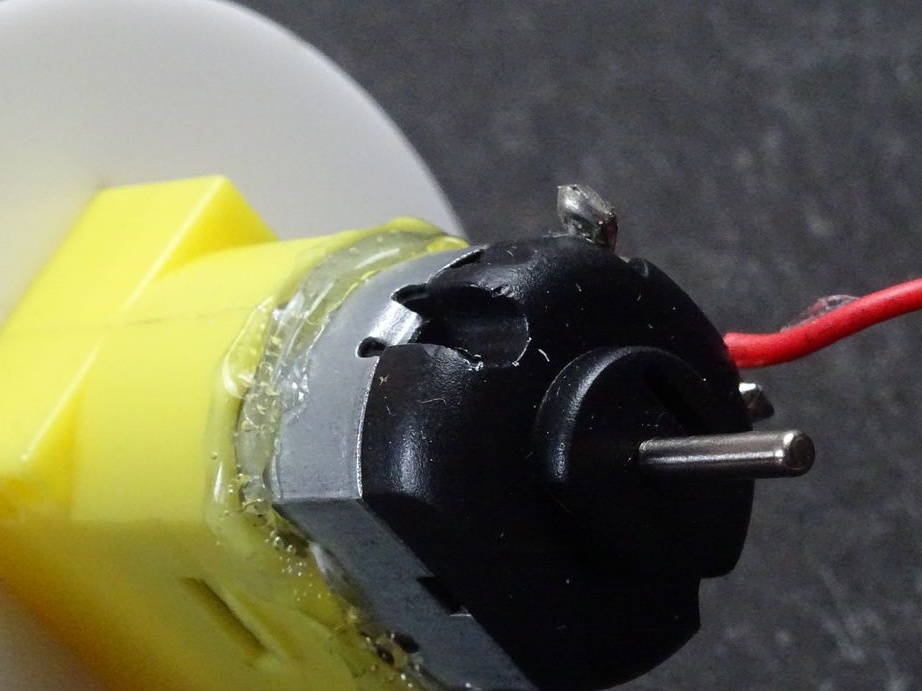
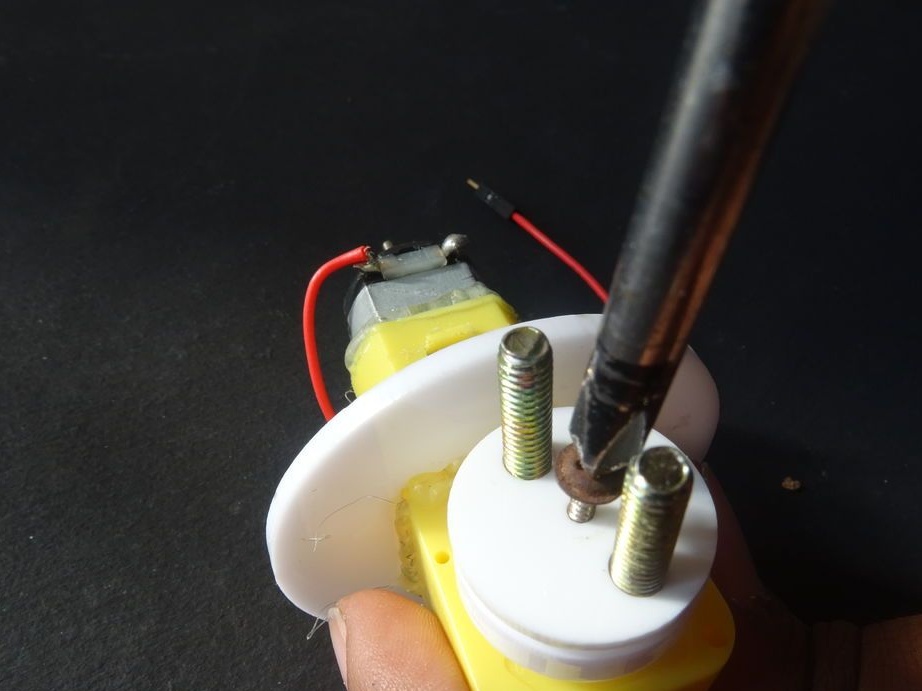
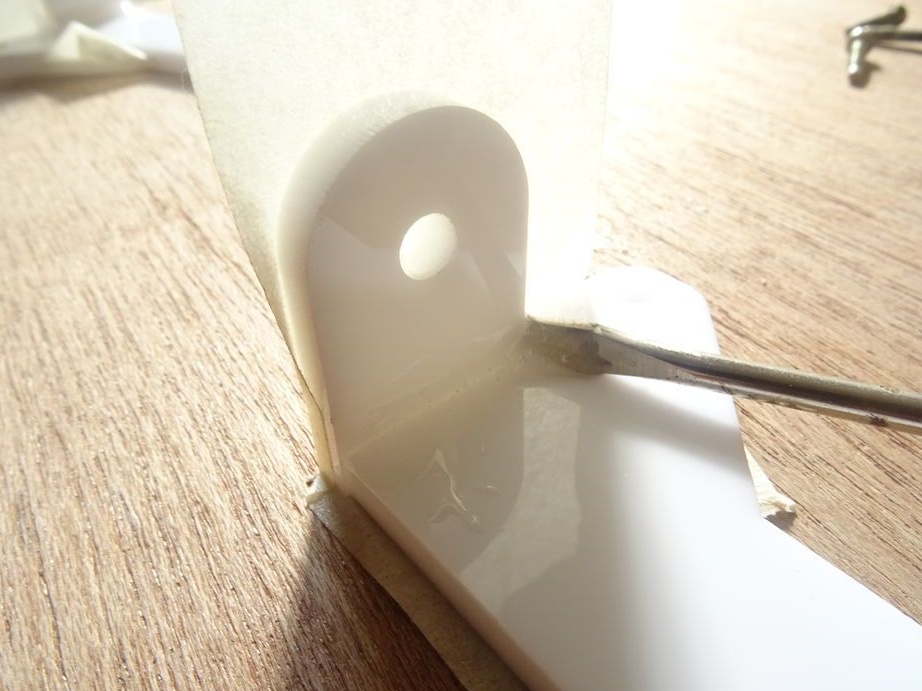
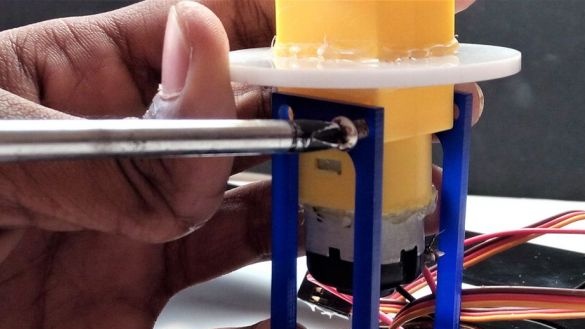
Étape huit: Réglage du moteur
Vous devez maintenant traiter le carter du moteur pour y installer des pièces.
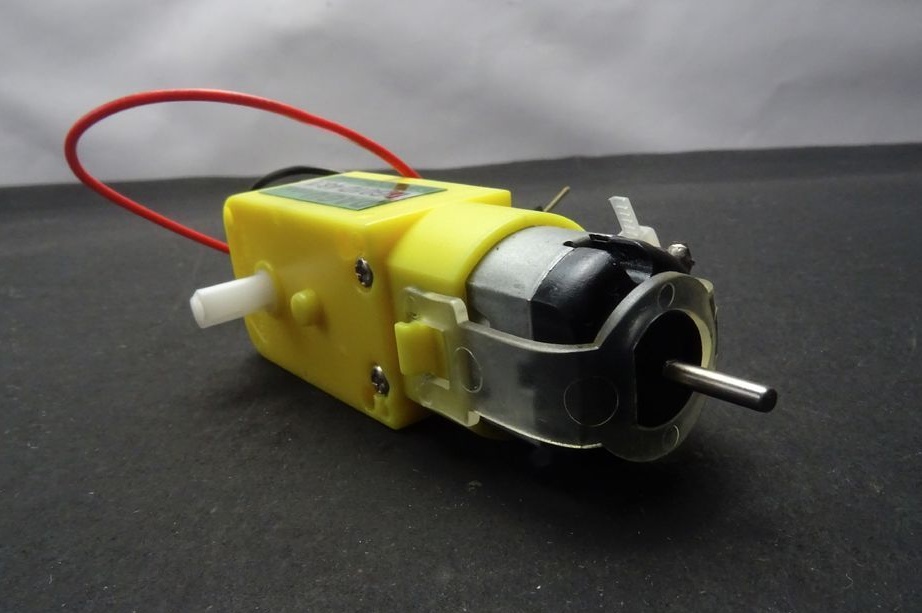
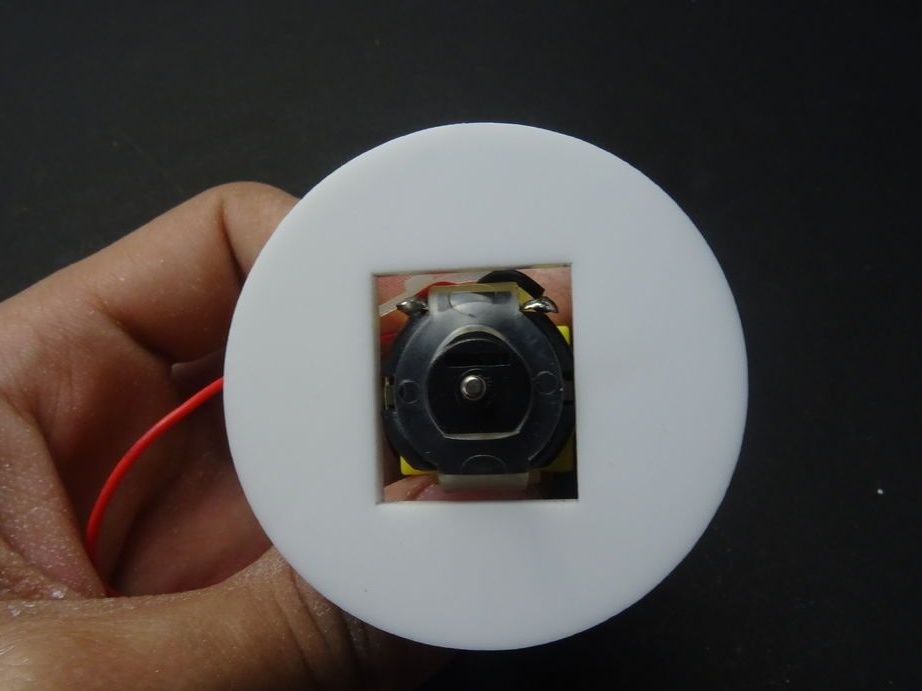
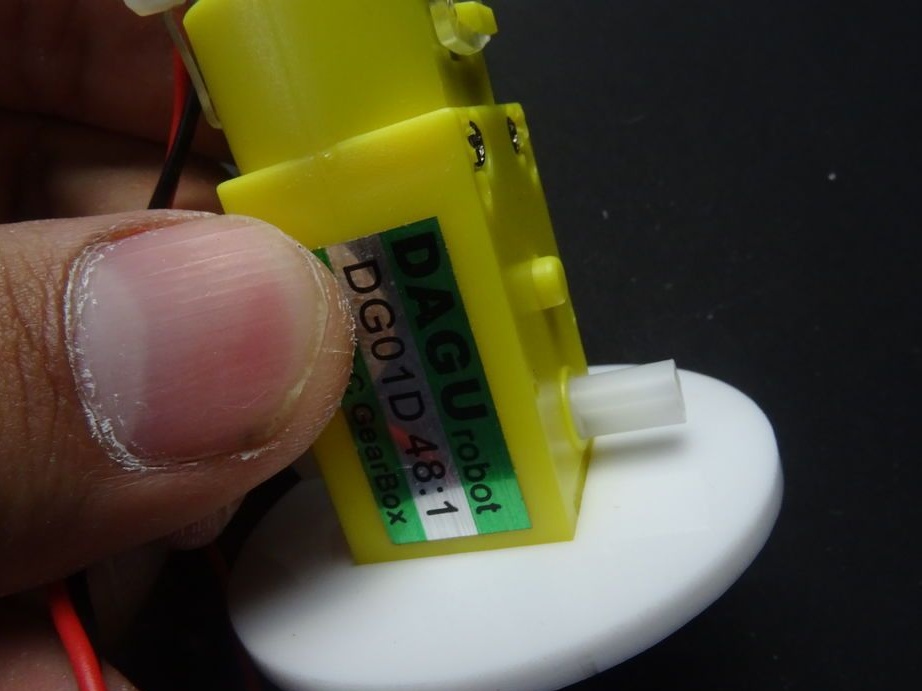

Coupe toutes les parties saillantes du corps, jusqu'à l'autocollant.
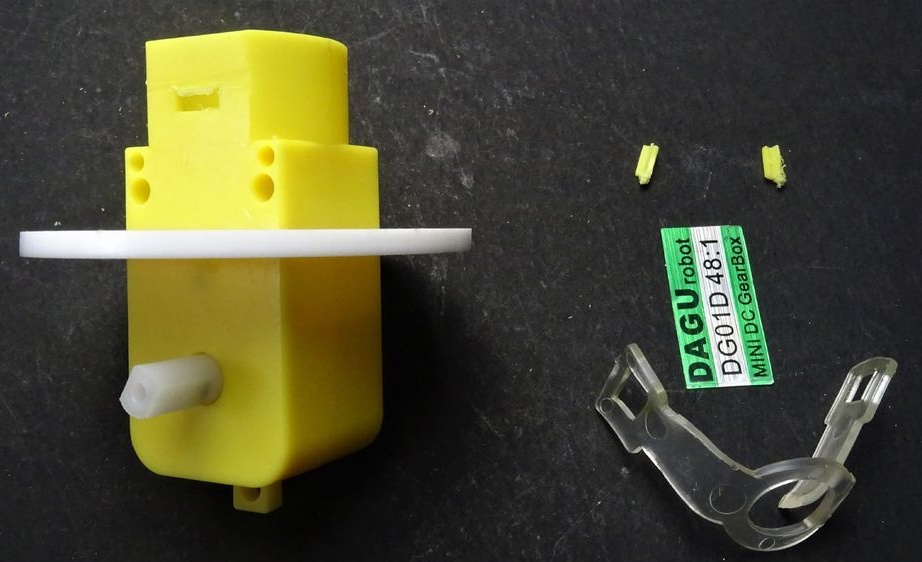

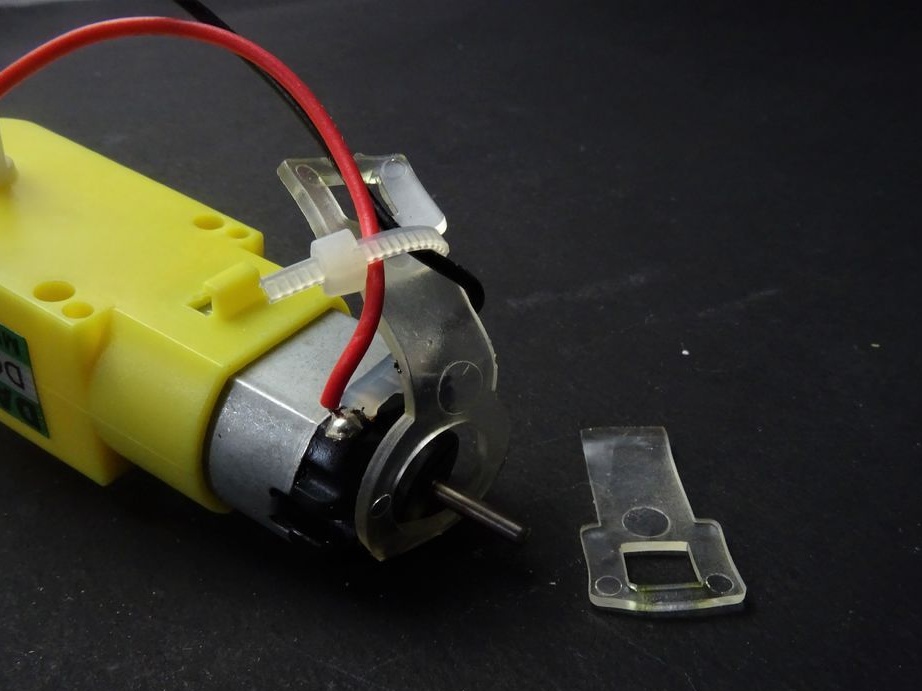


Installe la pièce sur le corps et la colle. Puisqu'il était nécessaire de couper le support moteur (loquets), le moteur se fixe également avec de la colle.

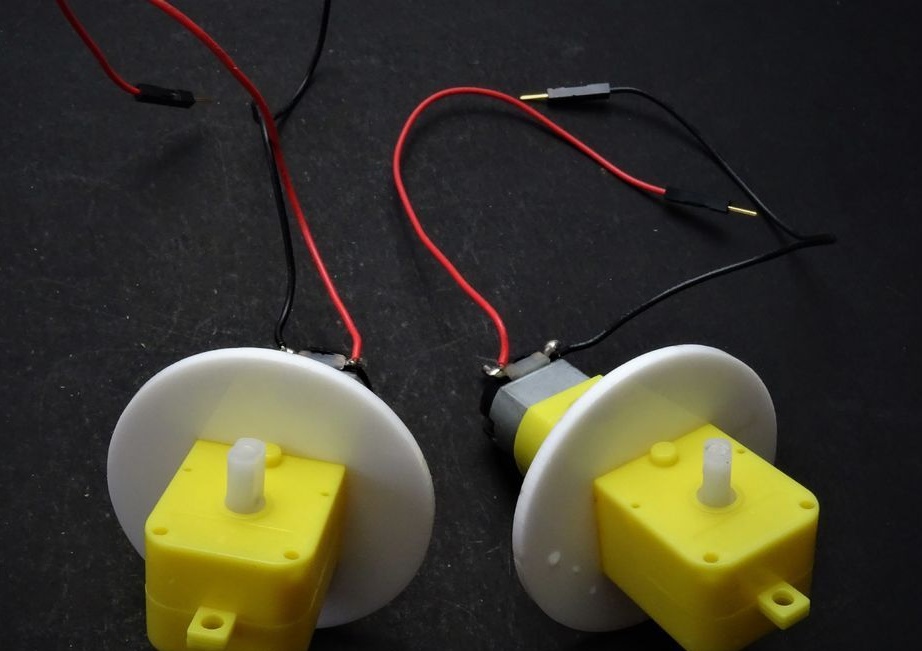

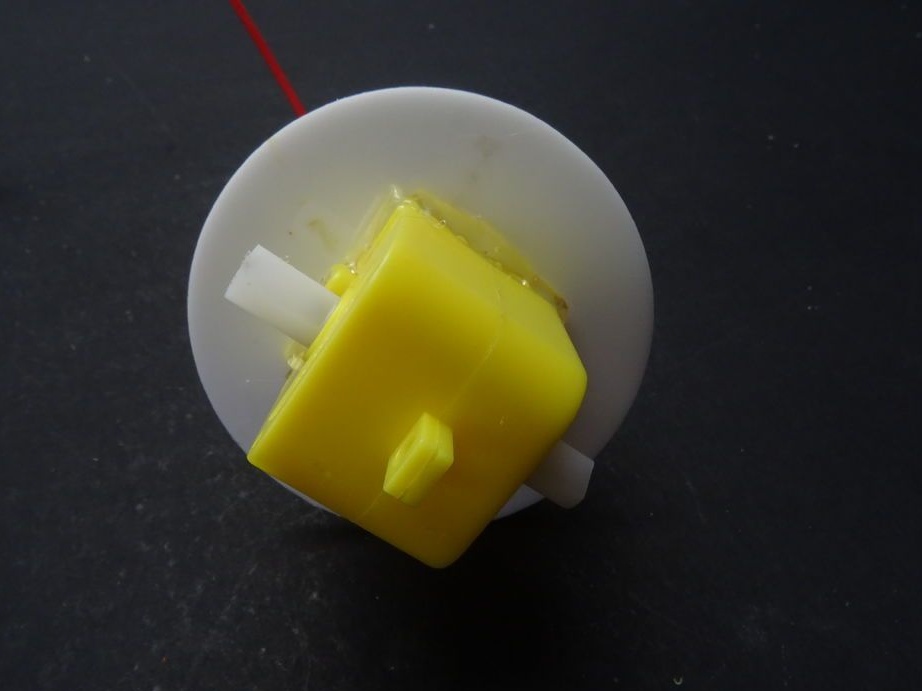
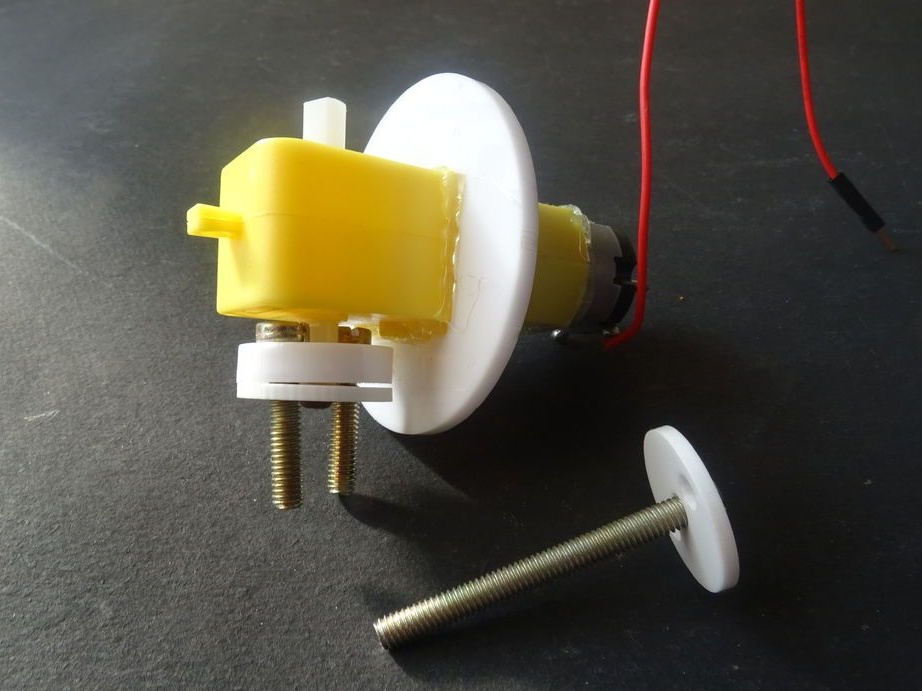
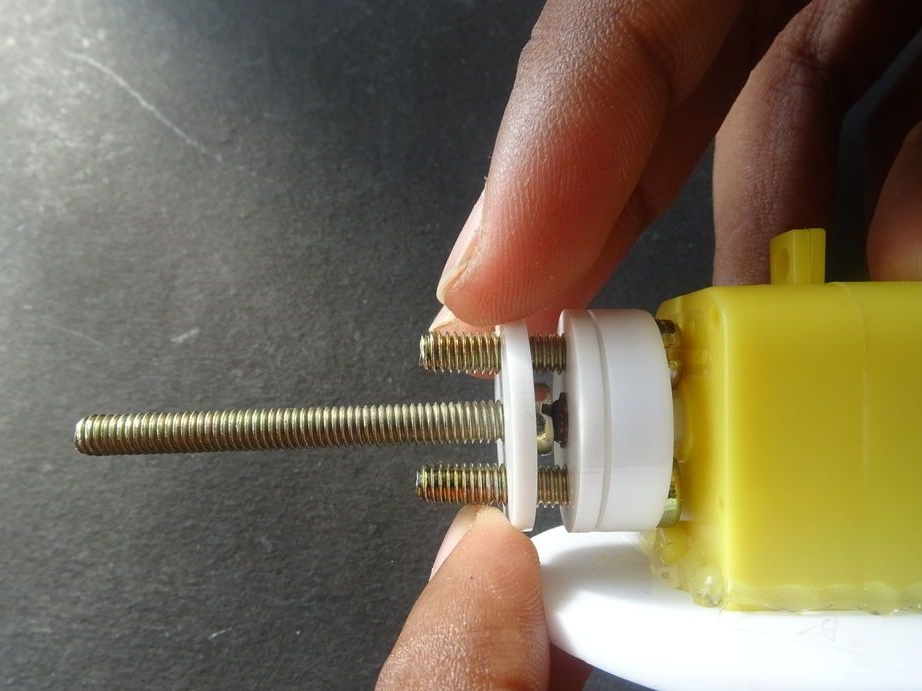
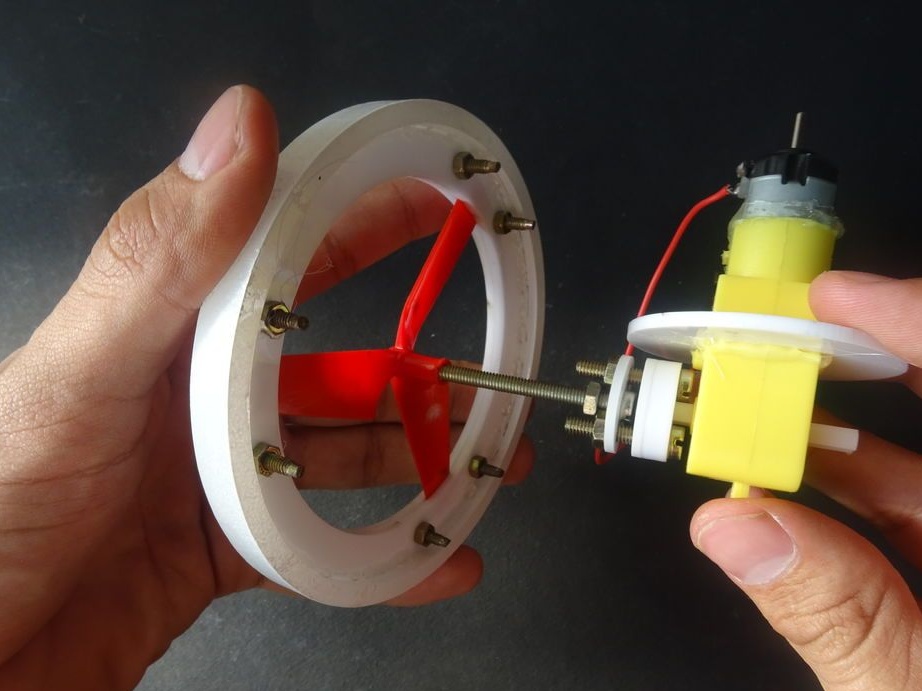
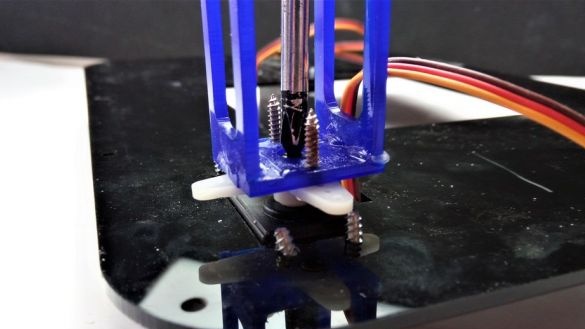
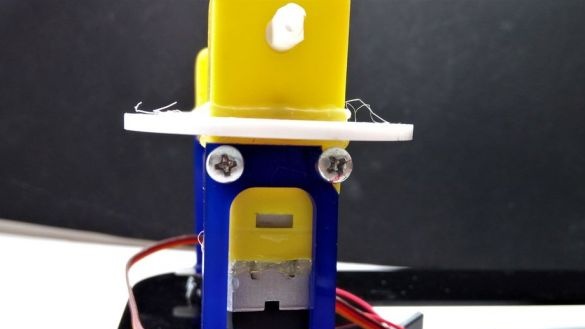
Étape neuf: mécanisme pivotant
Assemble un boîtier rotatif. Un moteur y sera installé et il se connectera au servo variateur.
Colle le boîtier.

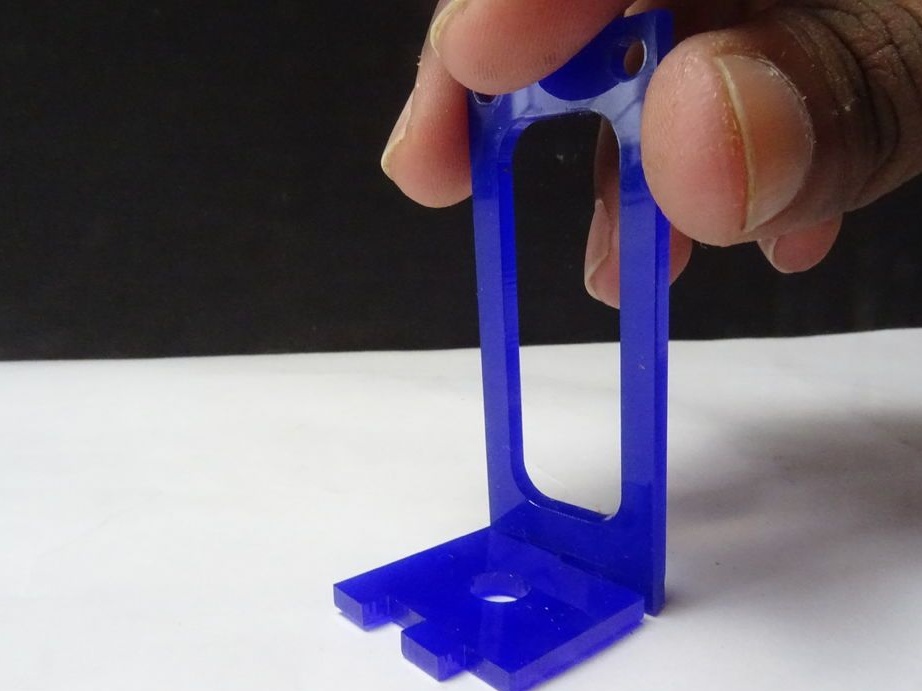

Vis sur le coupleur.


Étape dix: Peinture
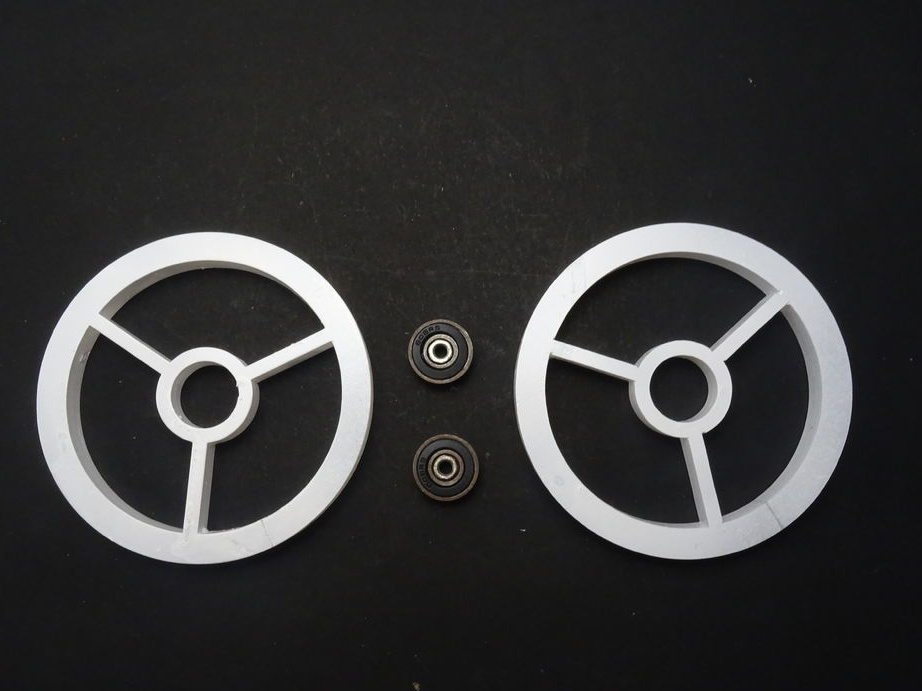
Le maître n'ayant pas d'acrylique blanc de l'épaisseur requise, les roues et la jante ont été découpées en acrylique transparent puis peintes en blanc.




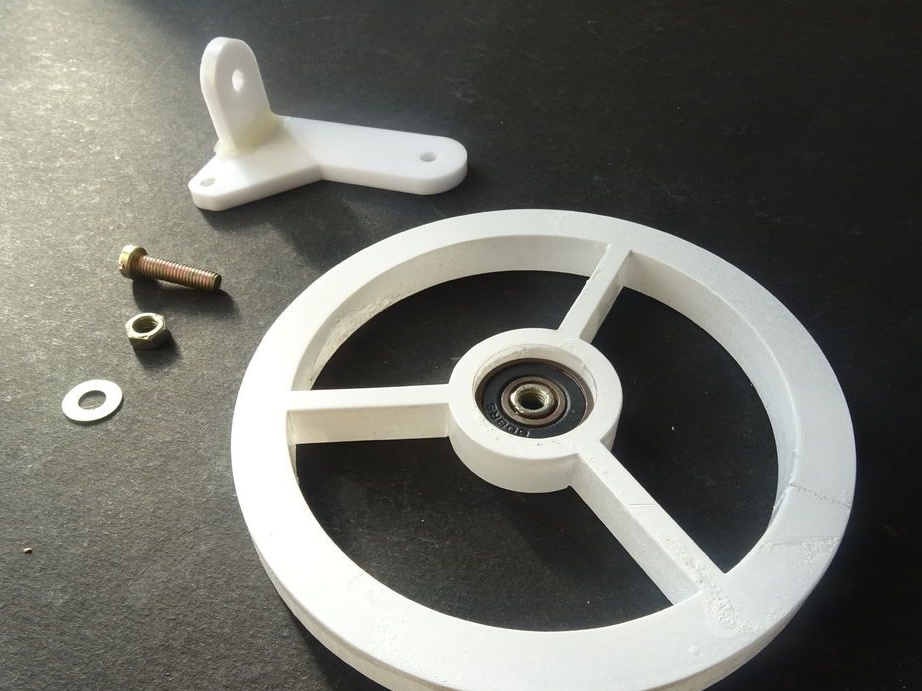
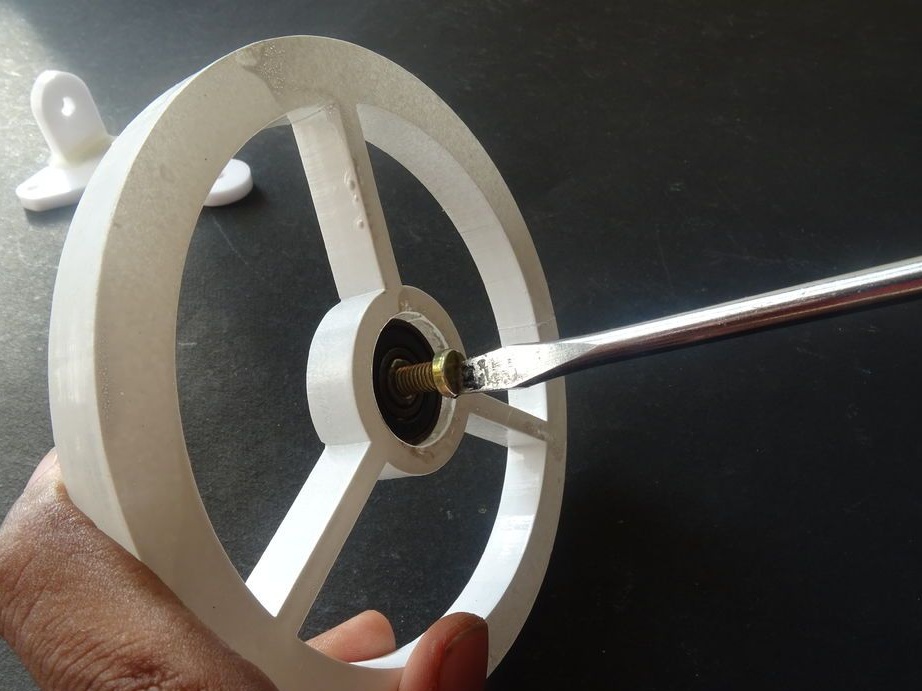
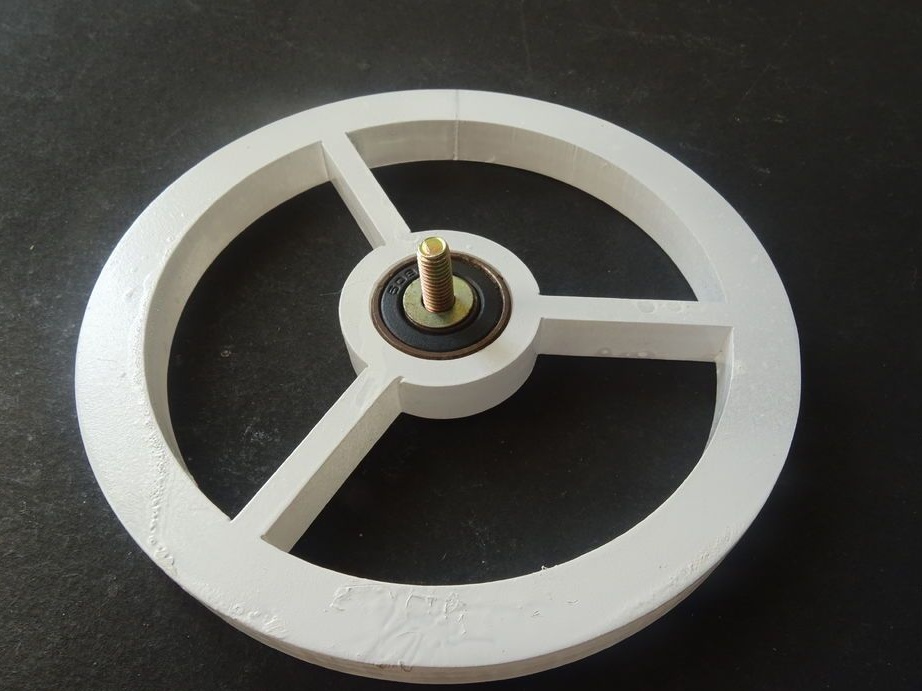
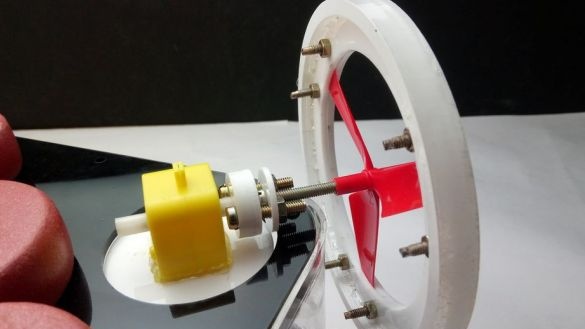
Étape onze: Assemblée de roue
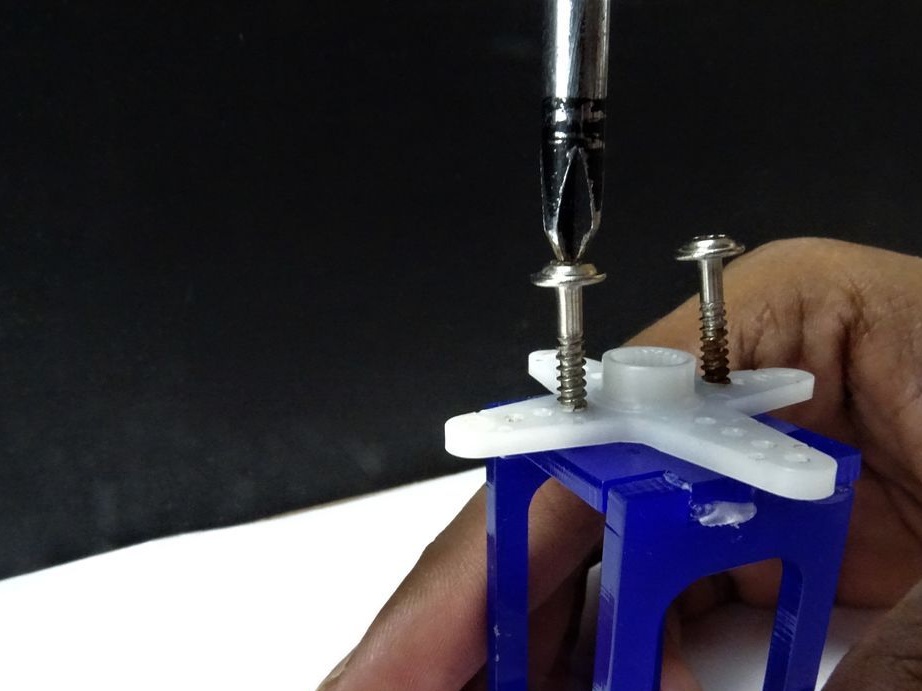
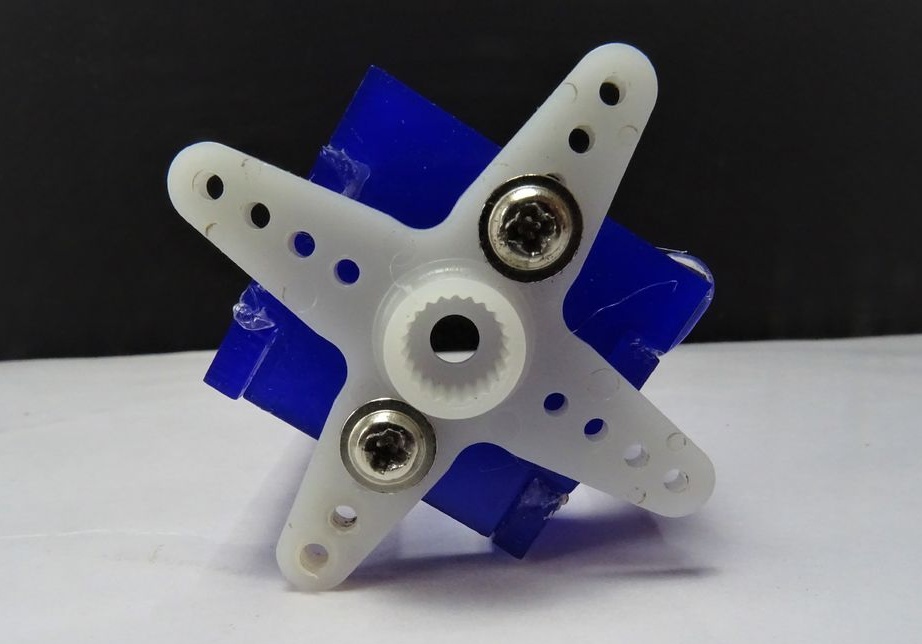
Sur les boulons recueille deux jantes. Les vis ne sont pas complètement serrées.




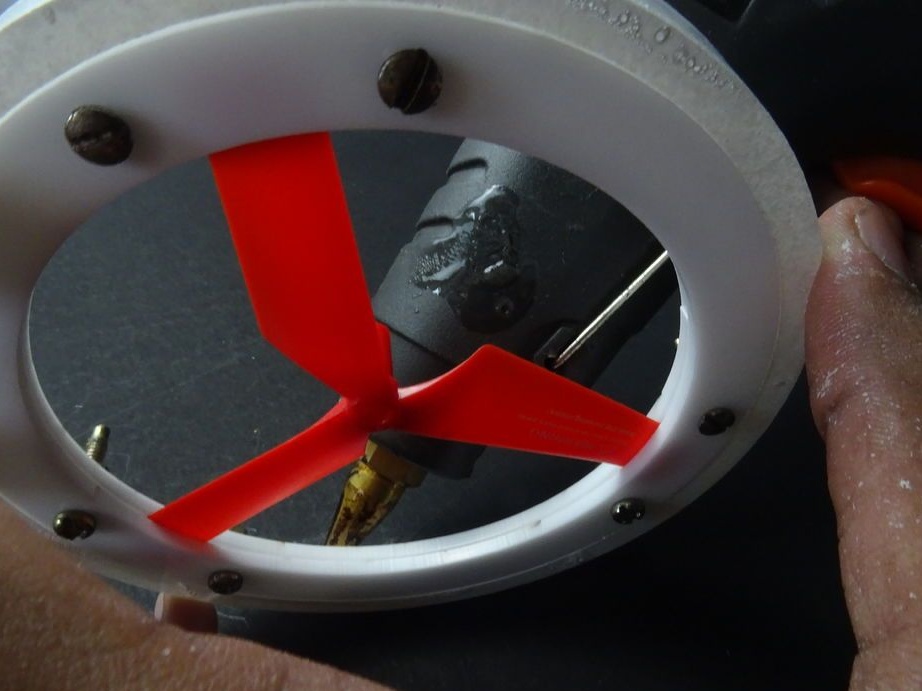
Entre les disques installe des vis et resserre les vis. Lors de l'installation de la vis, vous devez utiliser le gabarit pour la centrer.
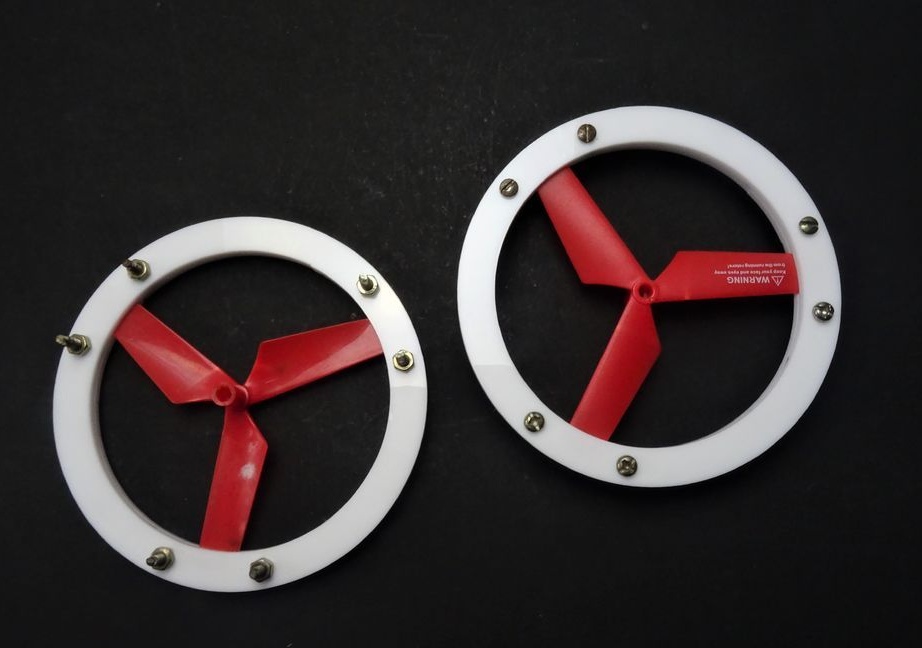
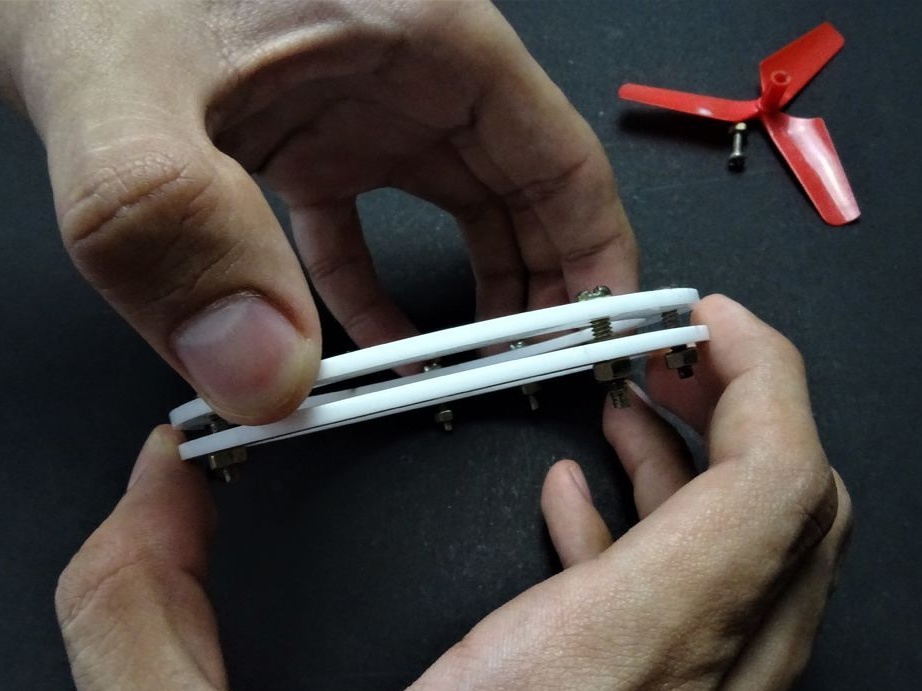
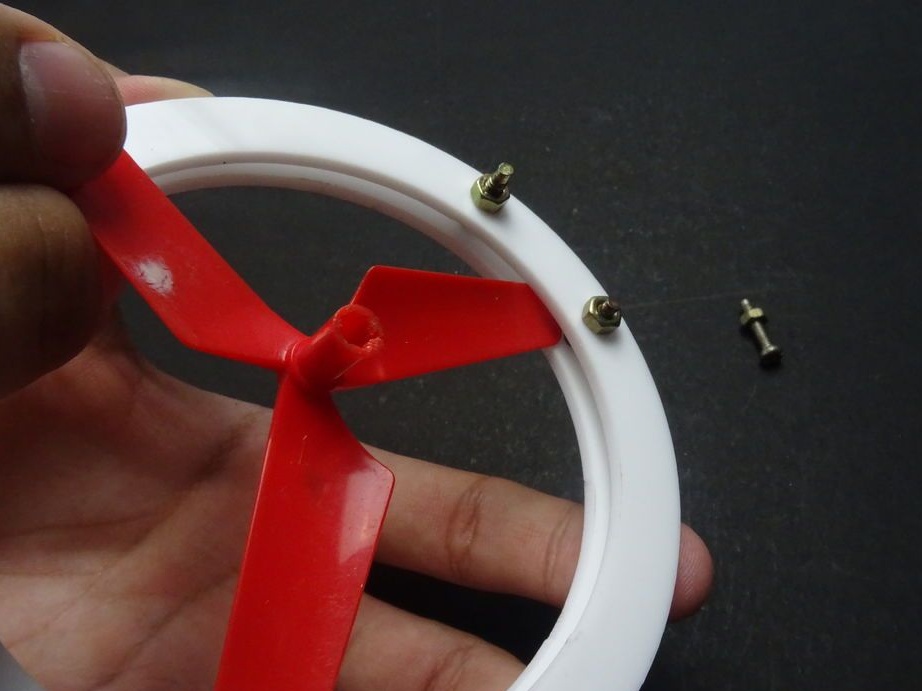
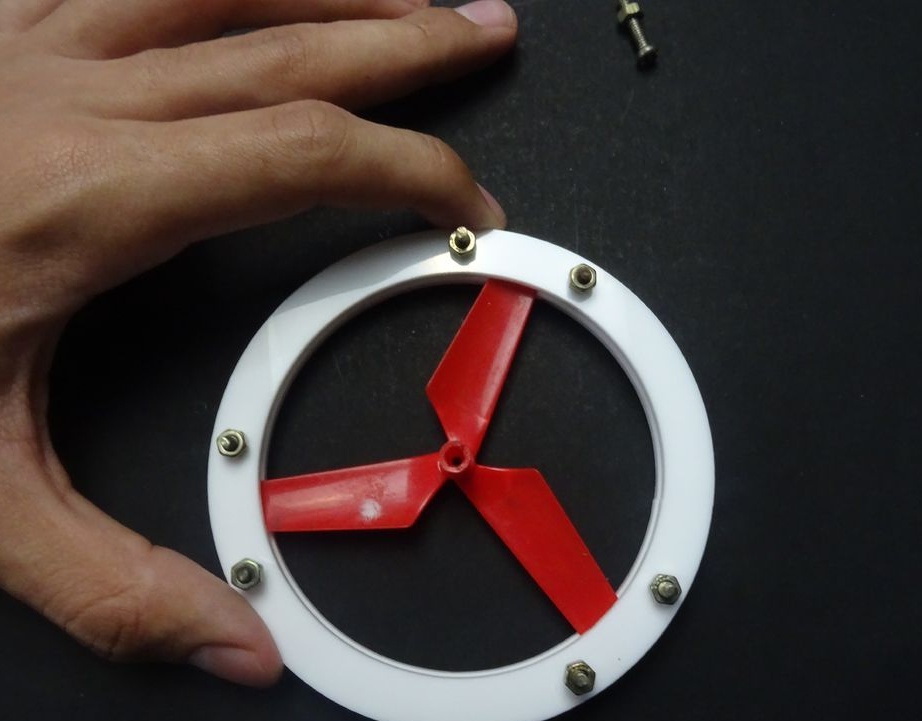
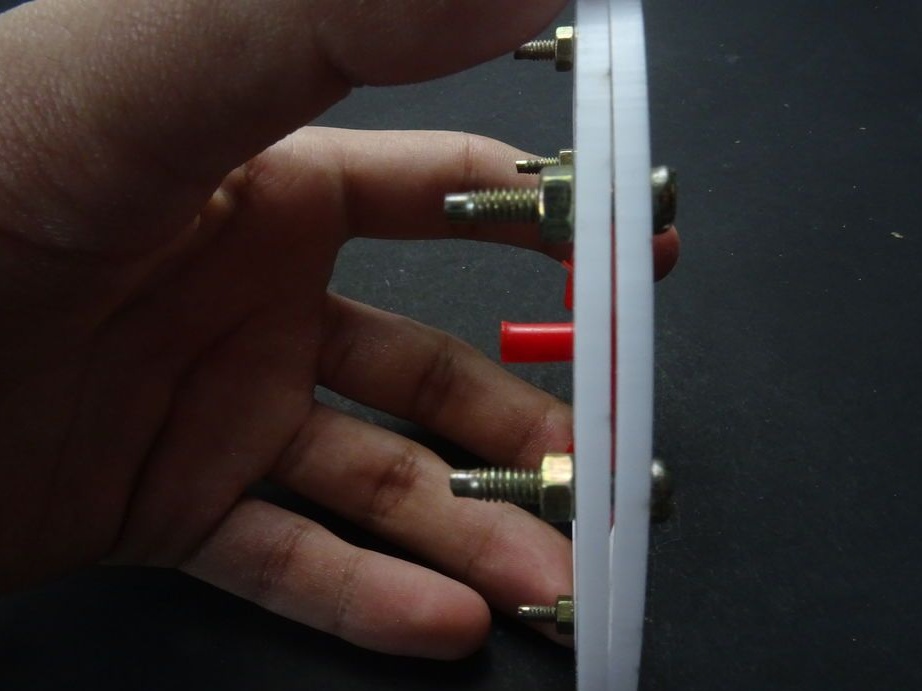

Définit la jante extérieure de la roue. La jante doit affleurer le disque interne.
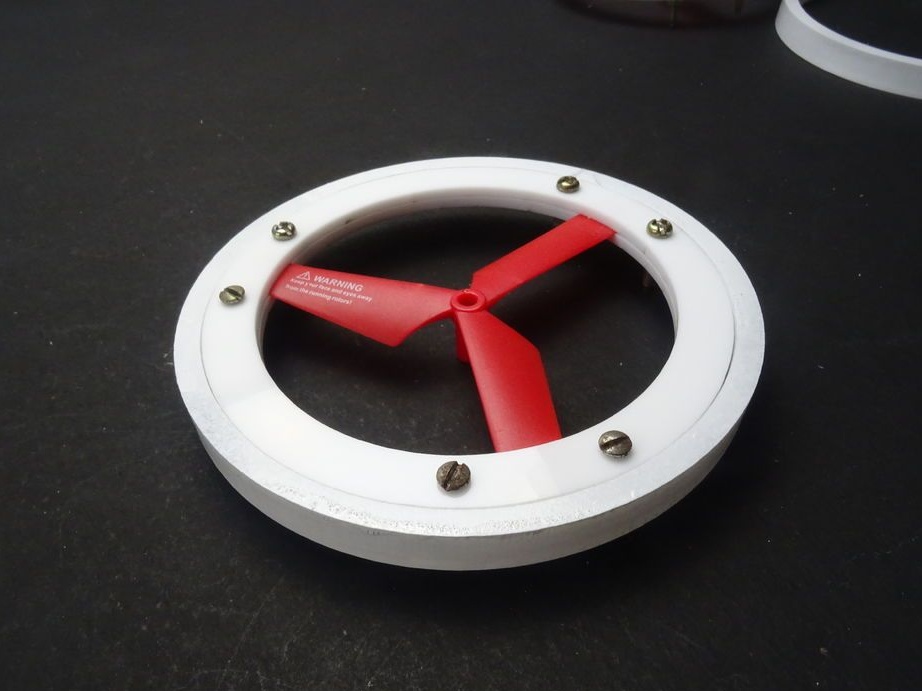

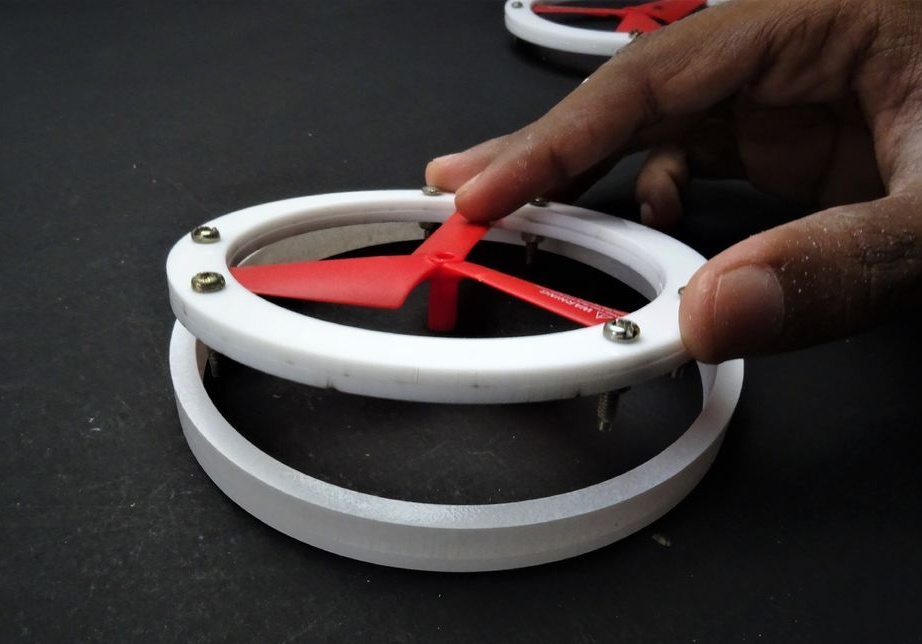
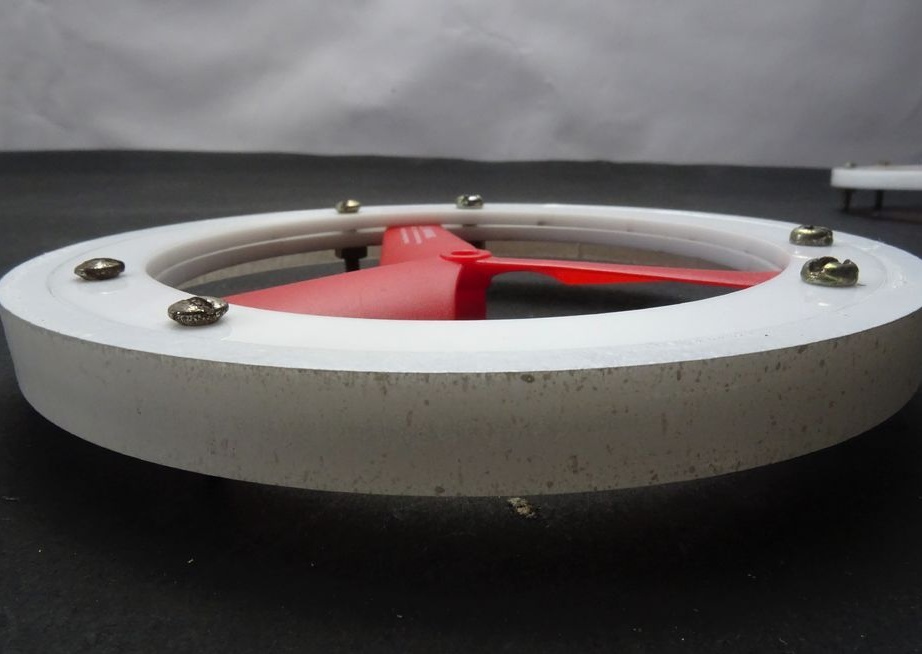

Appliquez de la colle chaude sur le joint.


Recueille maintenant les roues avant.
Un écrou de taille appropriée se bouche dans la bague intérieure du roulement. Enfonce les roulements dans les roues avant.



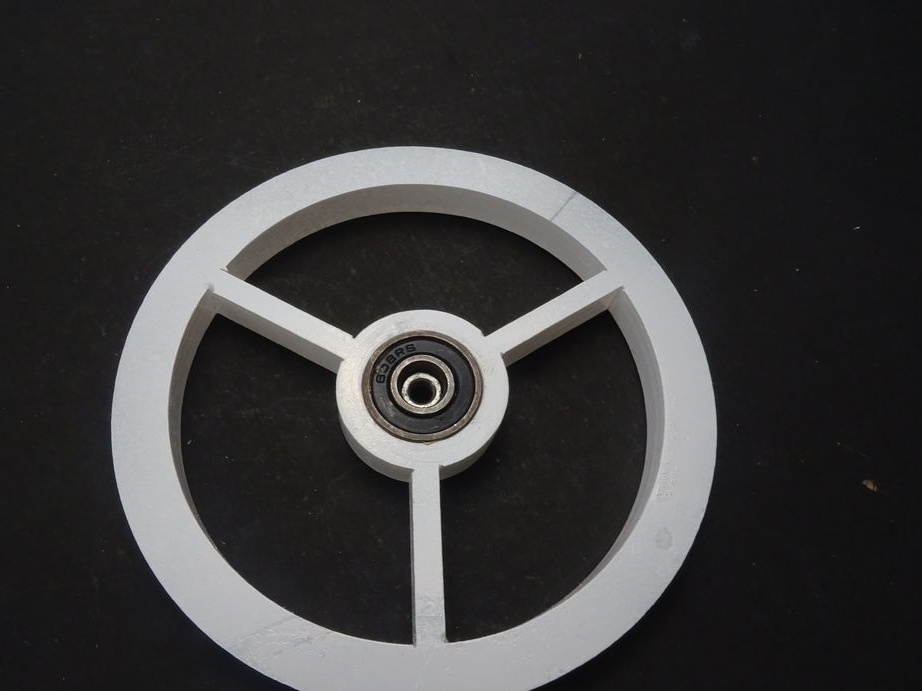
Les roues sont prêtes.

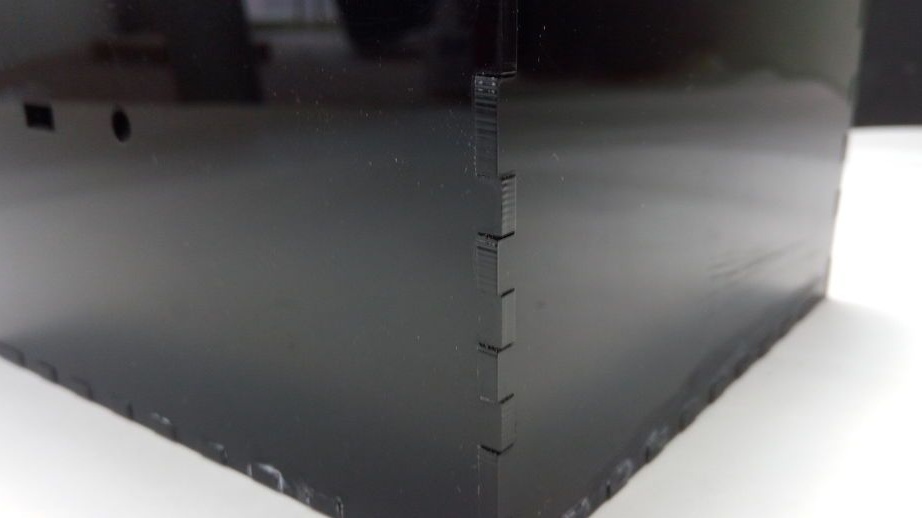
Étape douze: Boîtier électronique
Colle le boîtier de l'électronique.
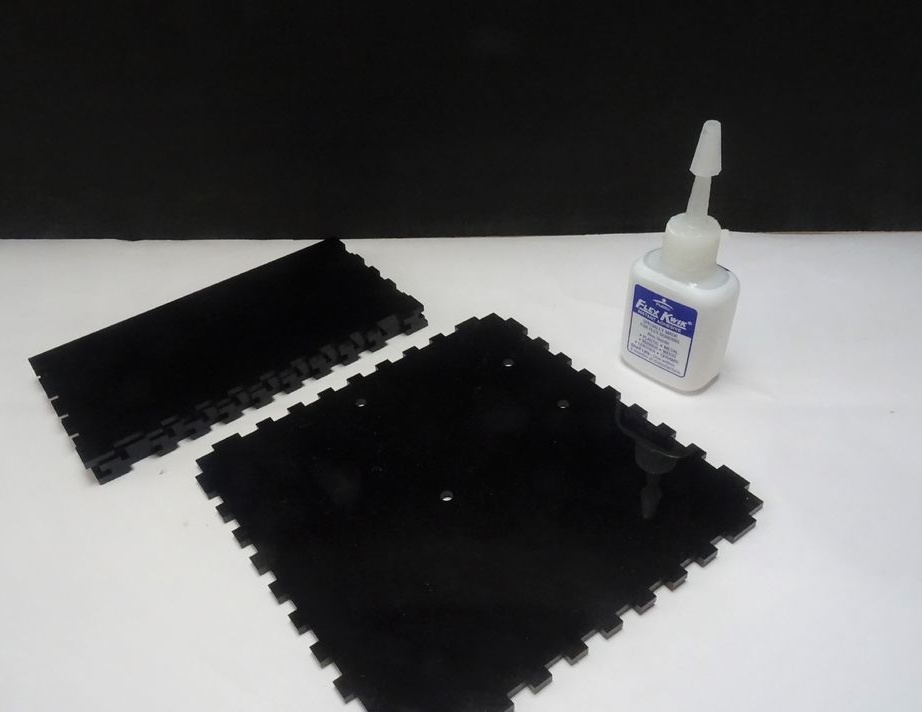
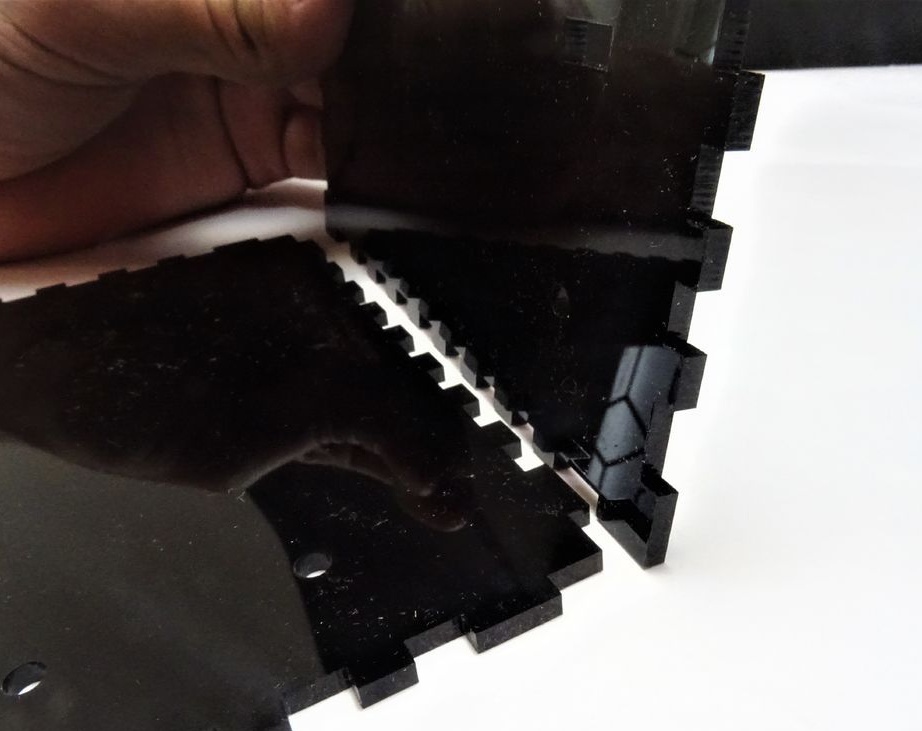

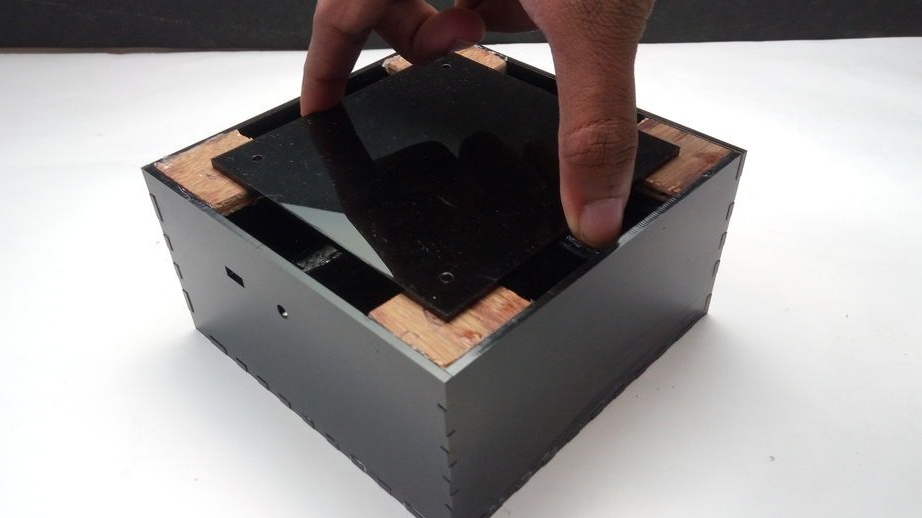
Cette boîte contiendra tout électronique composants, ce qui signifie qu'il doit être imperméabilisé aussi complètement que possible.


Quatre carrés sont découpés et collés sur la planche dans les coins de la boîte. Le couvercle de la boîte y sera attaché.



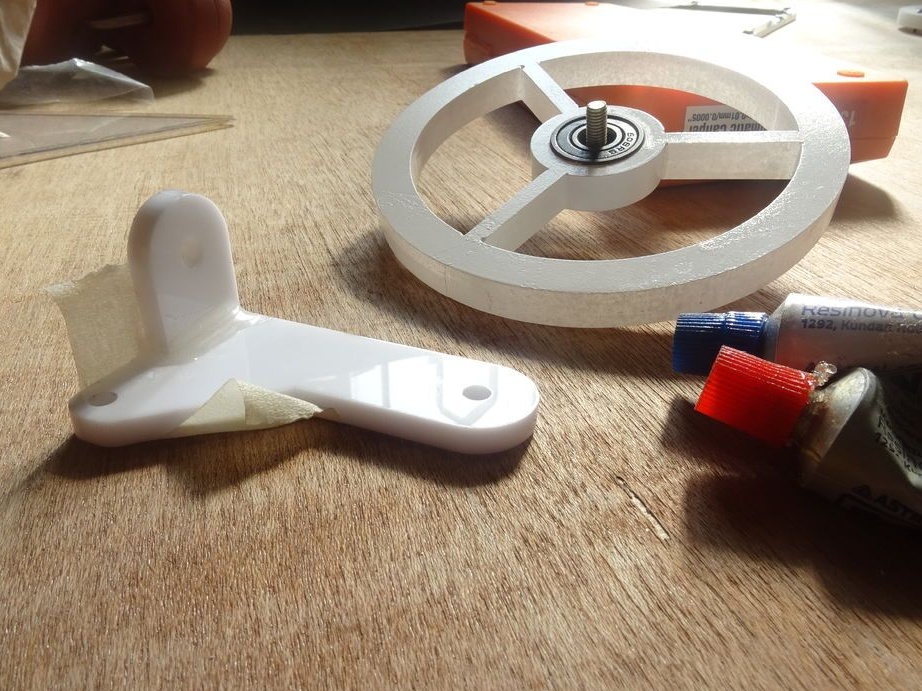
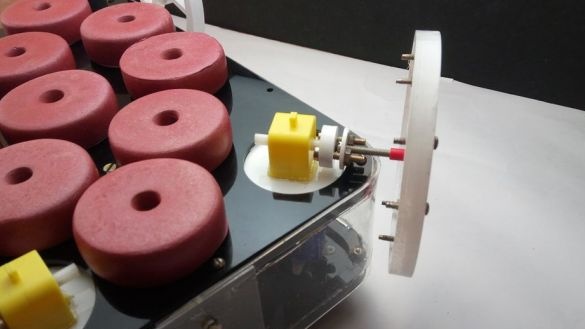
Étape 13: Support de roue
Vous devez maintenant connecter les roues et l'équipement avec un embrayage.





Vissez les roues avant à la traction.


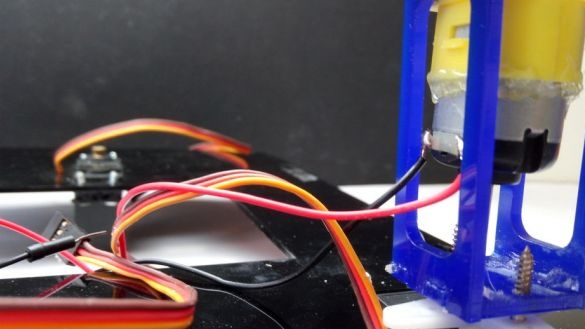
Quatorzième étape: connecter l'électronique
Selon le schéma, il installe des pièces électriques.
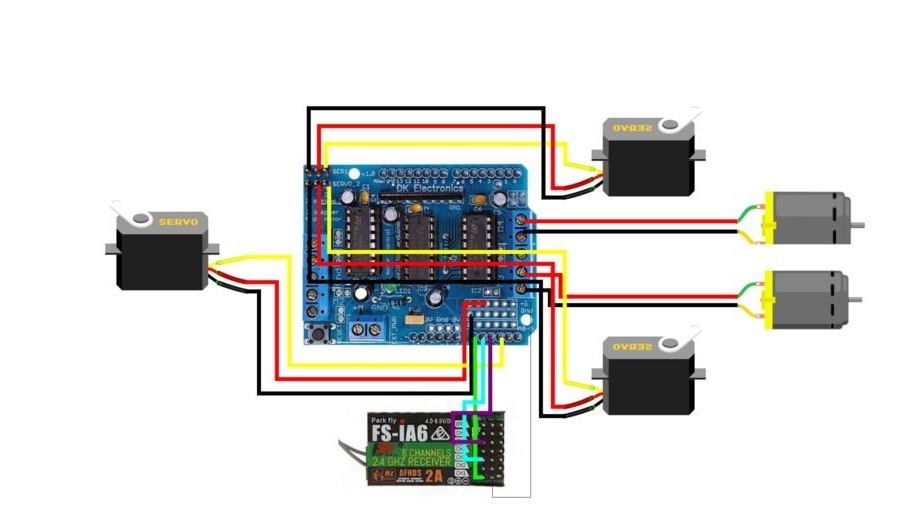

Les fils du moteur gauche à M1, la droite à M2. Connecte un pilote de moteur. Connecte les servos. Installe le récepteur: gnd du récepteur à gnd Arduino; Récepteur +5 V à +5 V Arduino; broche 3 à A0; broche 1 à A1; broche 5 à A2. Connecte la batterie.
Étape 15: Télécharger le code
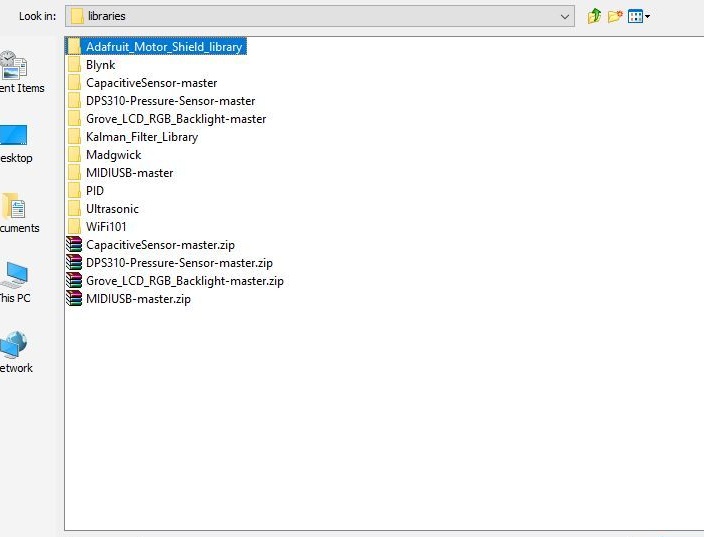
Vous devez d'abord télécharger la bibliothèque.
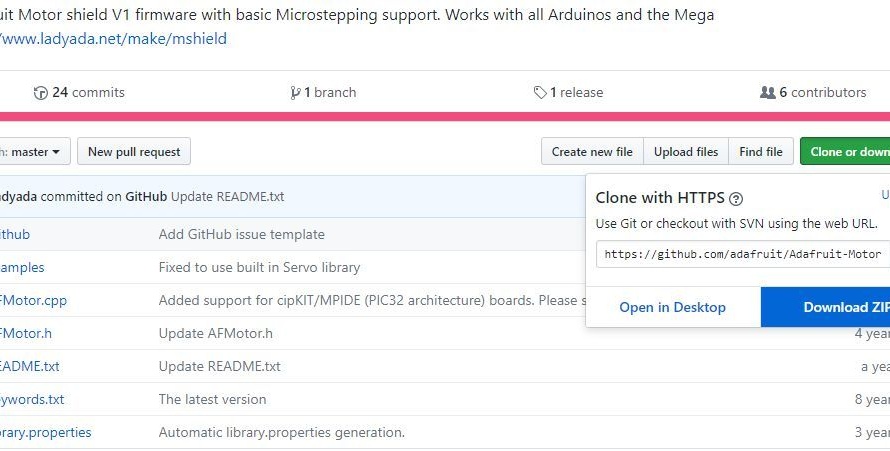
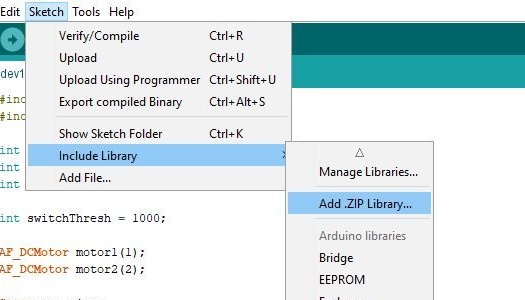
Ensuite, téléchargez le code. Lors du chargement, la batterie doit être déconnectée.
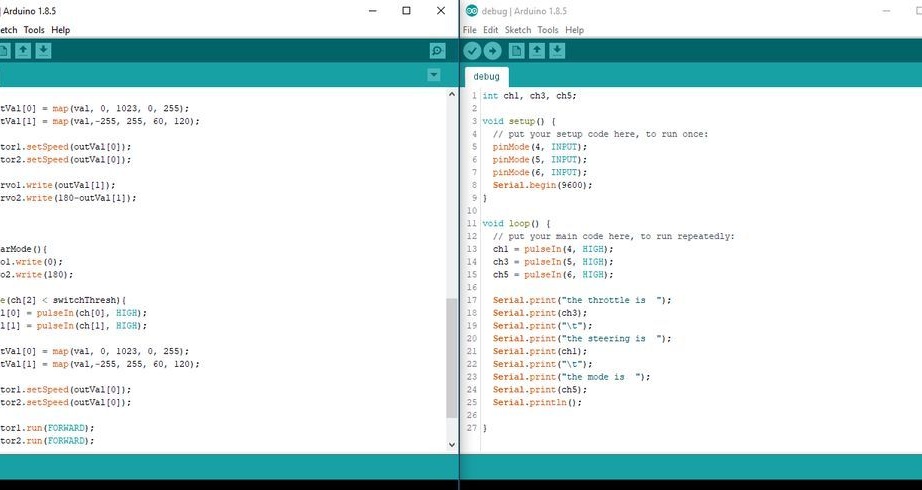
Téléchargez le code ci-dessous.
amphibious_rover_code.ino
Après avoir téléchargé le code, il vérifie le fonctionnement des moteurs et des entraînements.
Étape seize: assemblage
Il est maintenant temps d'assembler le véhicule tout-terrain.
[centre[/ centre]
Installe les servos. Installer des motoréducteurs.

Fixe les roues. Tord les deux moitiés du corps.






Tout est prêt et maintenant vous pouvez tester.