


Donc, en prenant la technique lego de mon fils, et à la maison Arduino Nano a commencé à combiner ces designers.
Nous aurons besoin de:
- Lego Technic (kits 42029 et 42033)
- Arduino Nano (lien vers la carte)
- DRV 8833
- 2 servo variateurs SG-90
- Récepteur IR
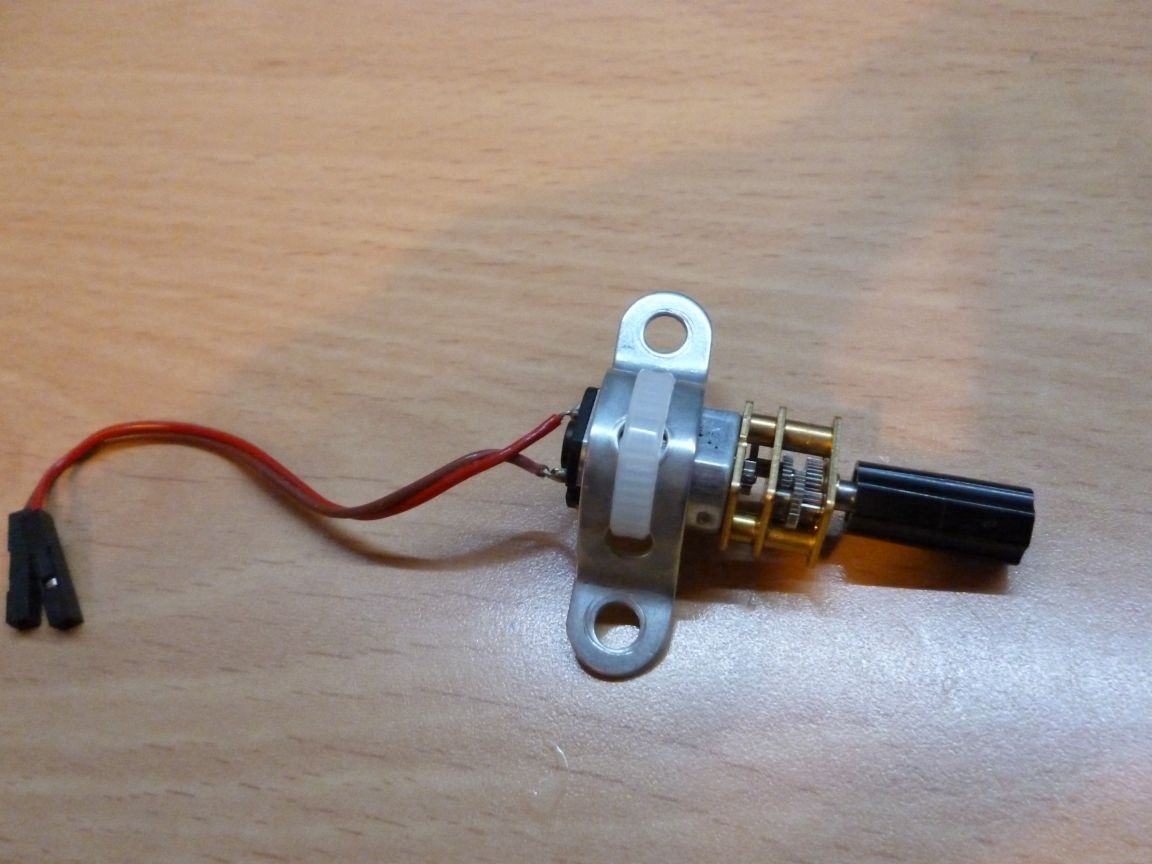
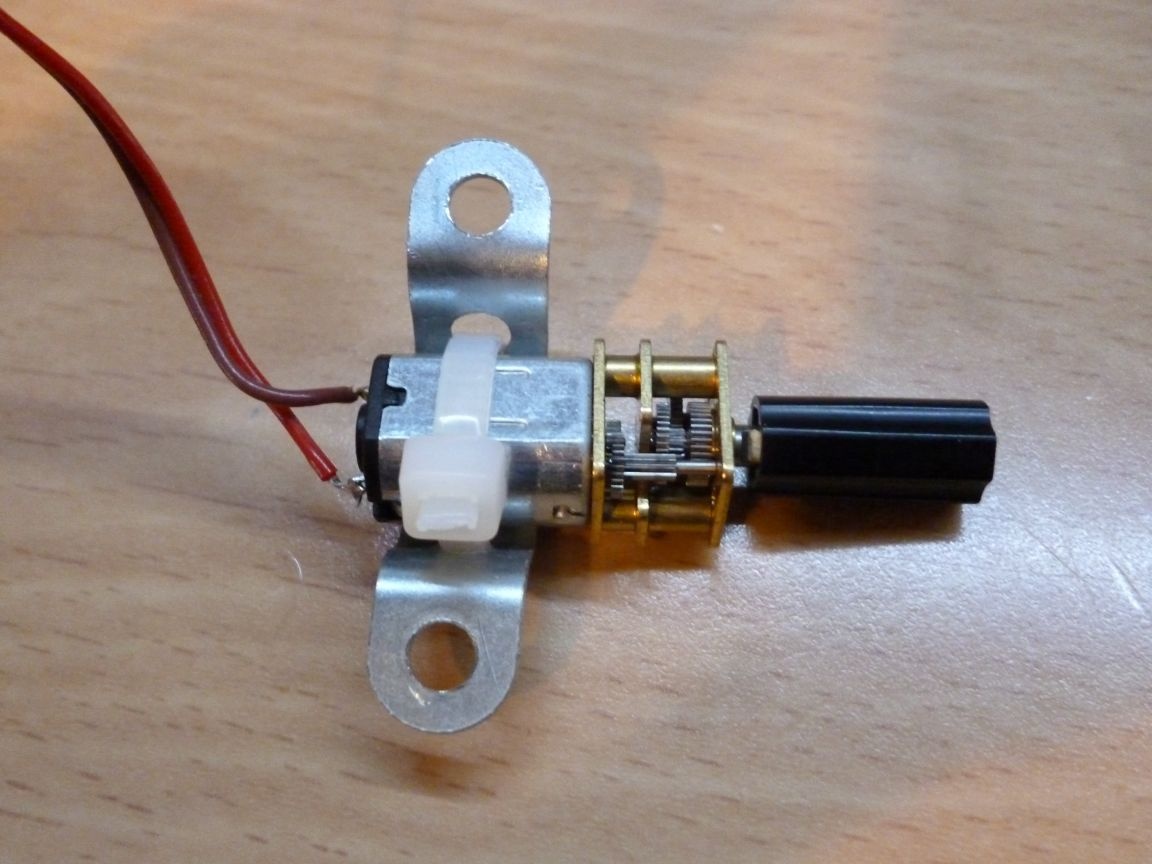
- motoréducteur
- 2 LED
- 2 résistances 150 ohms
- Condensateur 10v 1000uF
- 2 peignes à une rangée PLS-40
- 2 connecteurs PBS-20
- Inductance 68mkGn
- 4 batteries NI-Mn 1.2v 1000mA
- Connecteur papa-maman deux broches à câbler
- Homutik
- Fils de différentes couleurs
- souder
- Colophane
- fer à souder
- Boulons 3x40 et écrous et rondelles pour eux
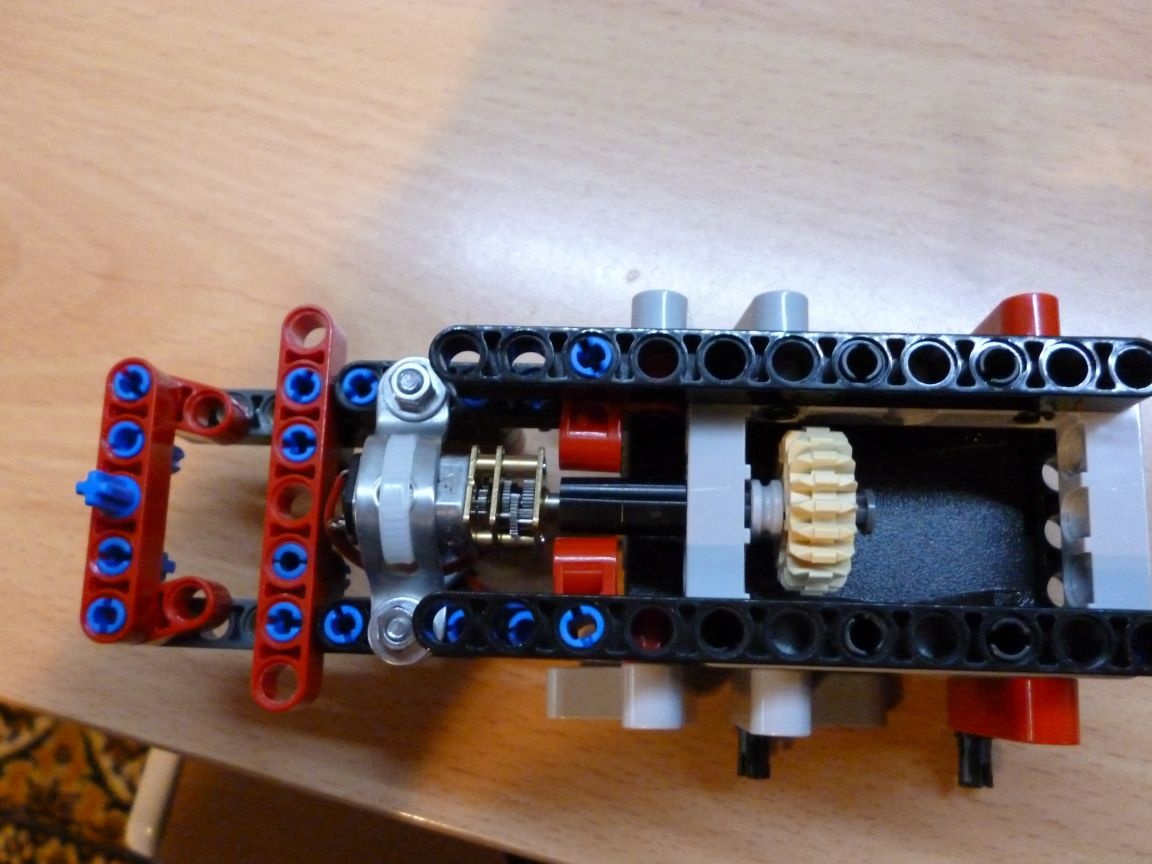
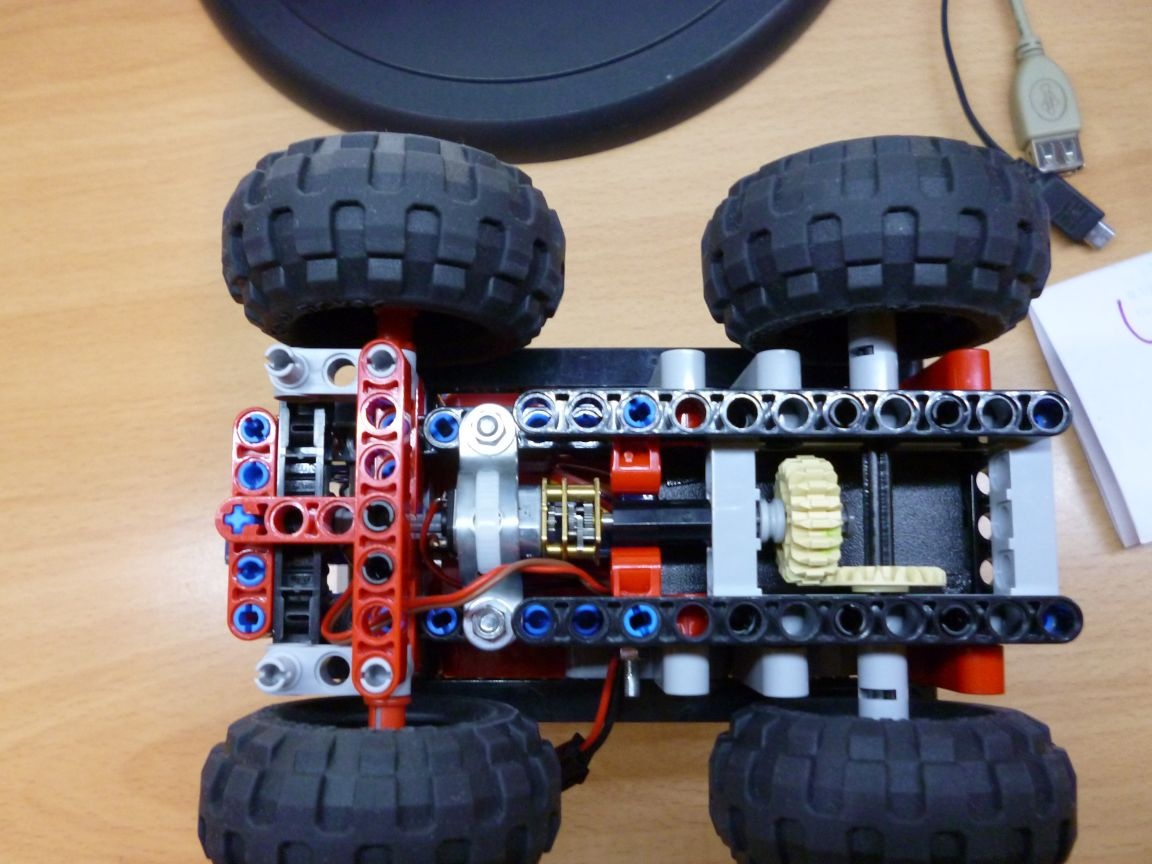
Étape 1 assemblez le châssis et l'essieu moteur.
Vous pouvez assembler n'importe quel châssis de Technic, de toute façon, cela s'est avéré comme ça.
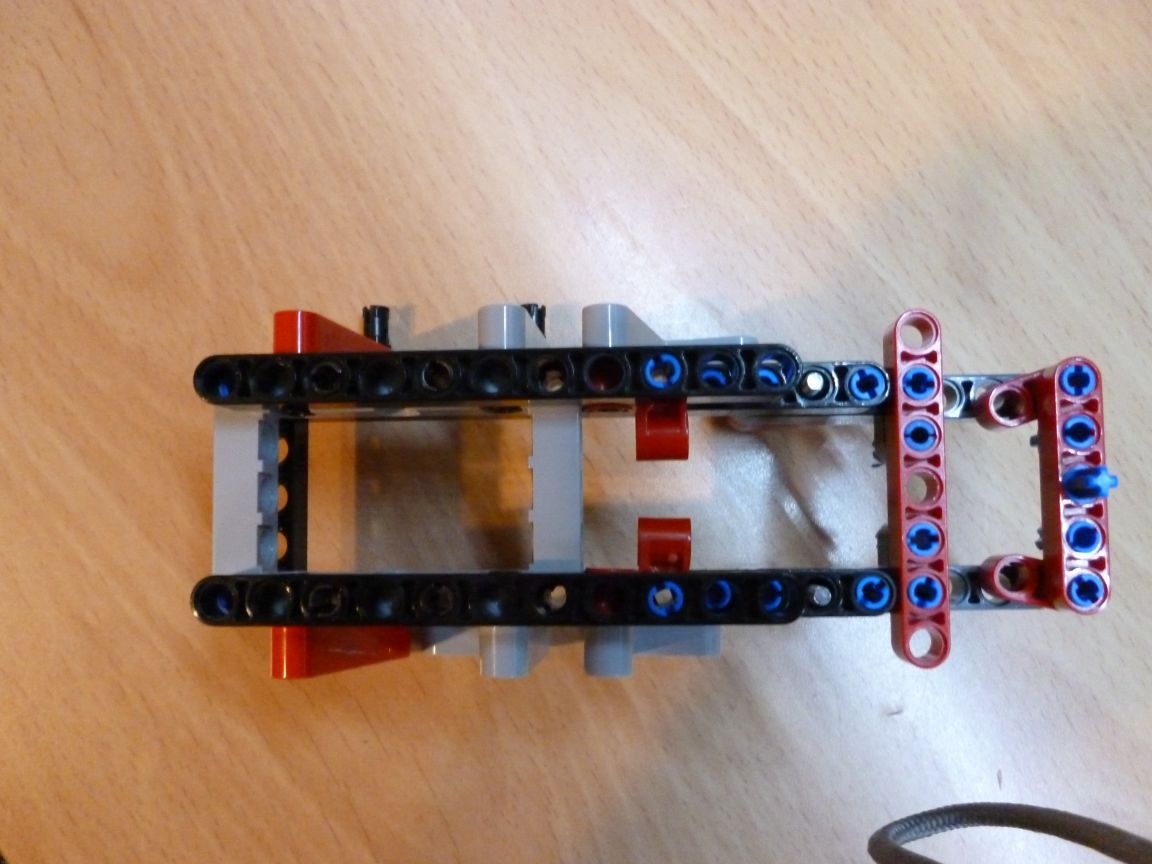
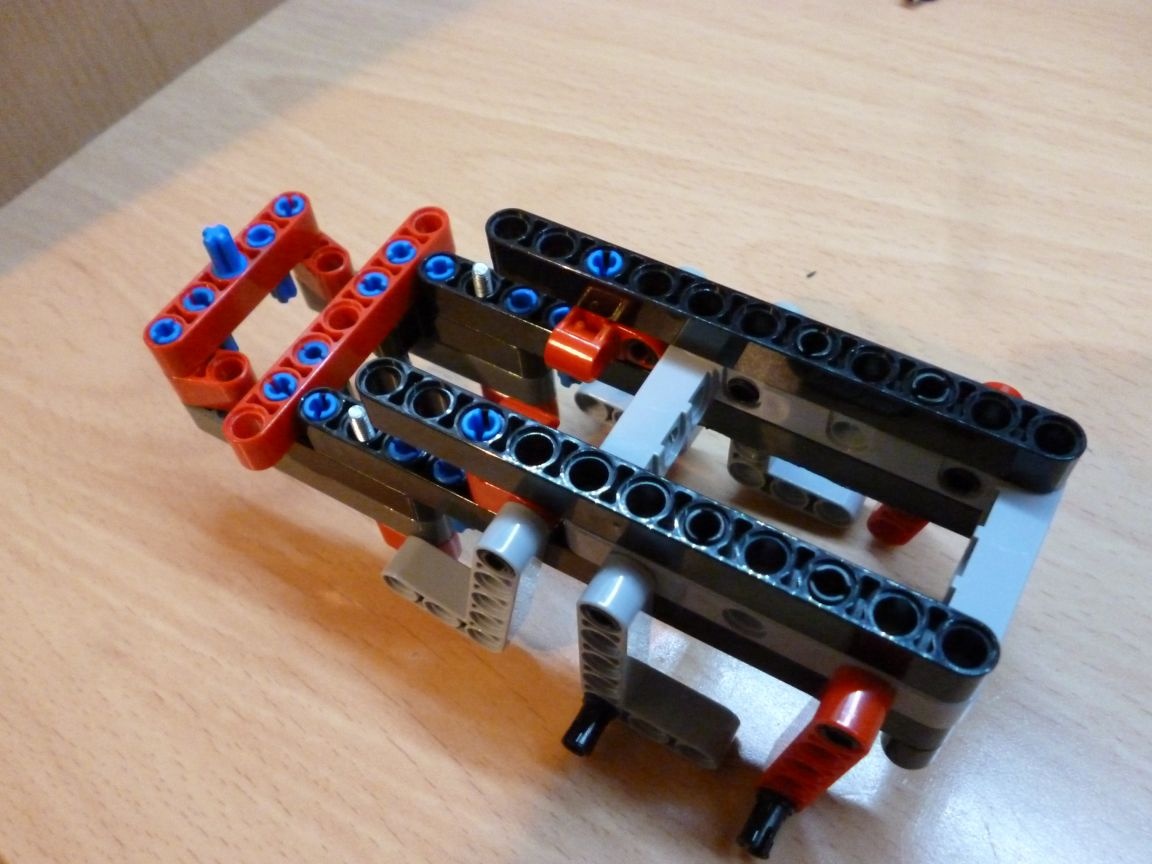
Il n'y a que le problème de la connexion du motoréducteur avec les pièces du concepteur. J'ai décidé ceci comme suit: mettre sur l'axe du motoréducteur un manchon de connexion et inséré un morceau d'allumette pour la fixation. Pour le montage du motoréducteur, utilisez du plastique métallique d'un concepteur de fer et une pince. Il s'est avéré ce qui suit:
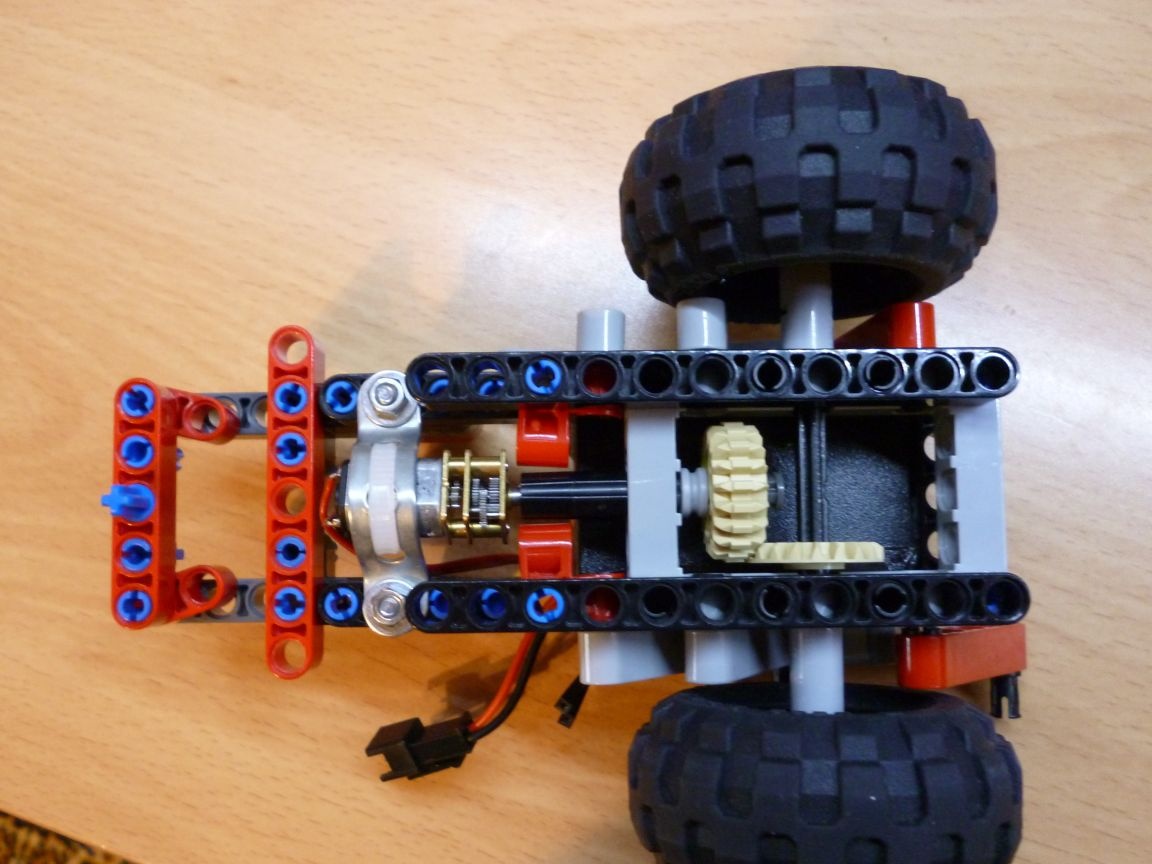
Ensuite, nous installons la conception résultante sur le châssis à l'aide de boulons 3x40:
Et mettez sur les roues:
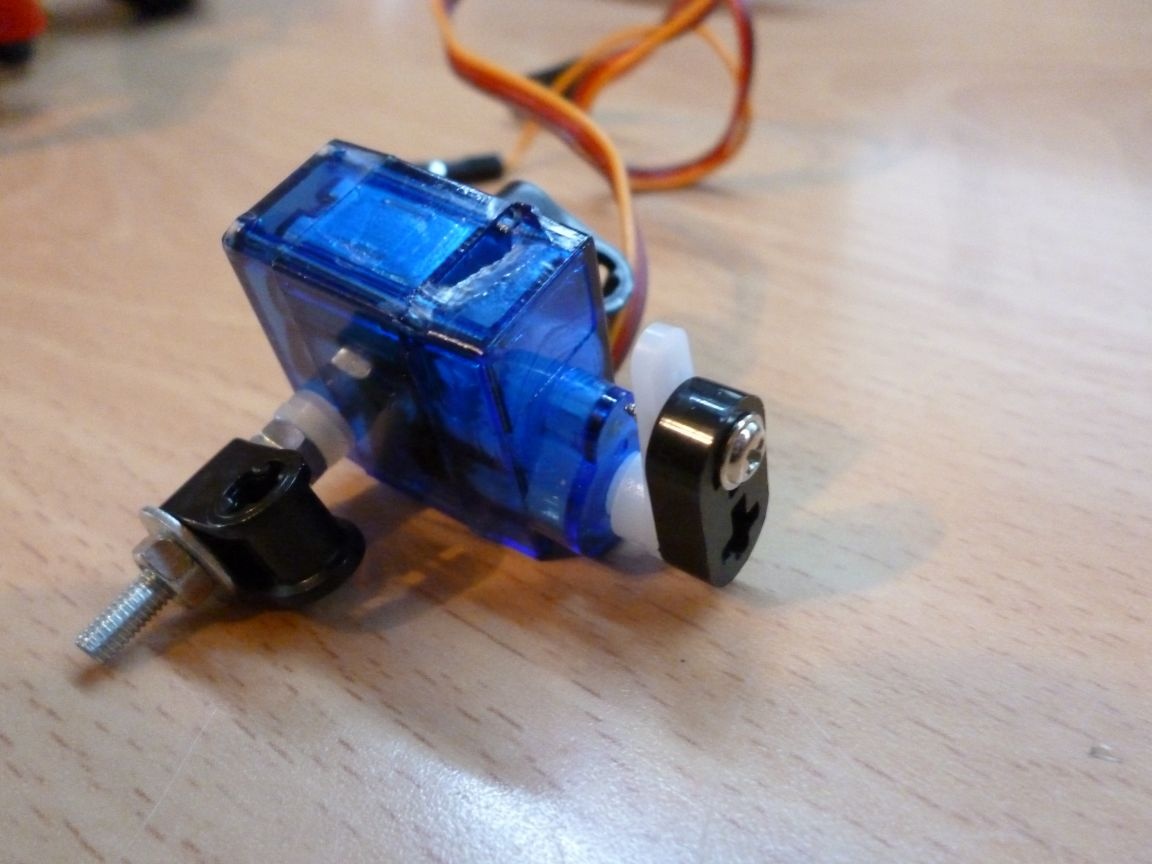
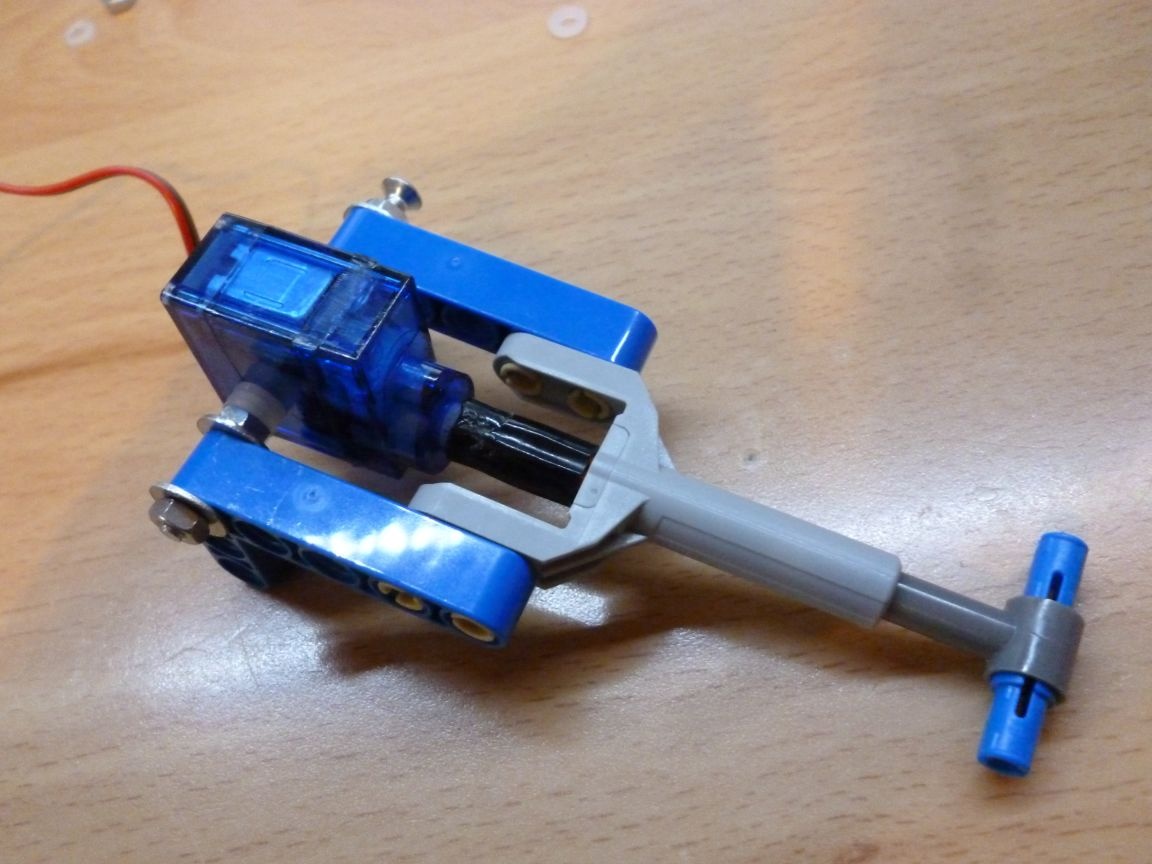
Étape 2 roues pivotantes
Pour effectuer la rotation a pris le servo SG-90. Il est nécessaire de percer soigneusement, afin de ne pas toucher les pièces internes, un trou traversant d'un diamètre de 3,2 mm ou tout simplement coupé avec un couteau à papeterie.

Nous insérons un boulon dans le trou fait, et des coins le long des bords et fixons avec des écrous:

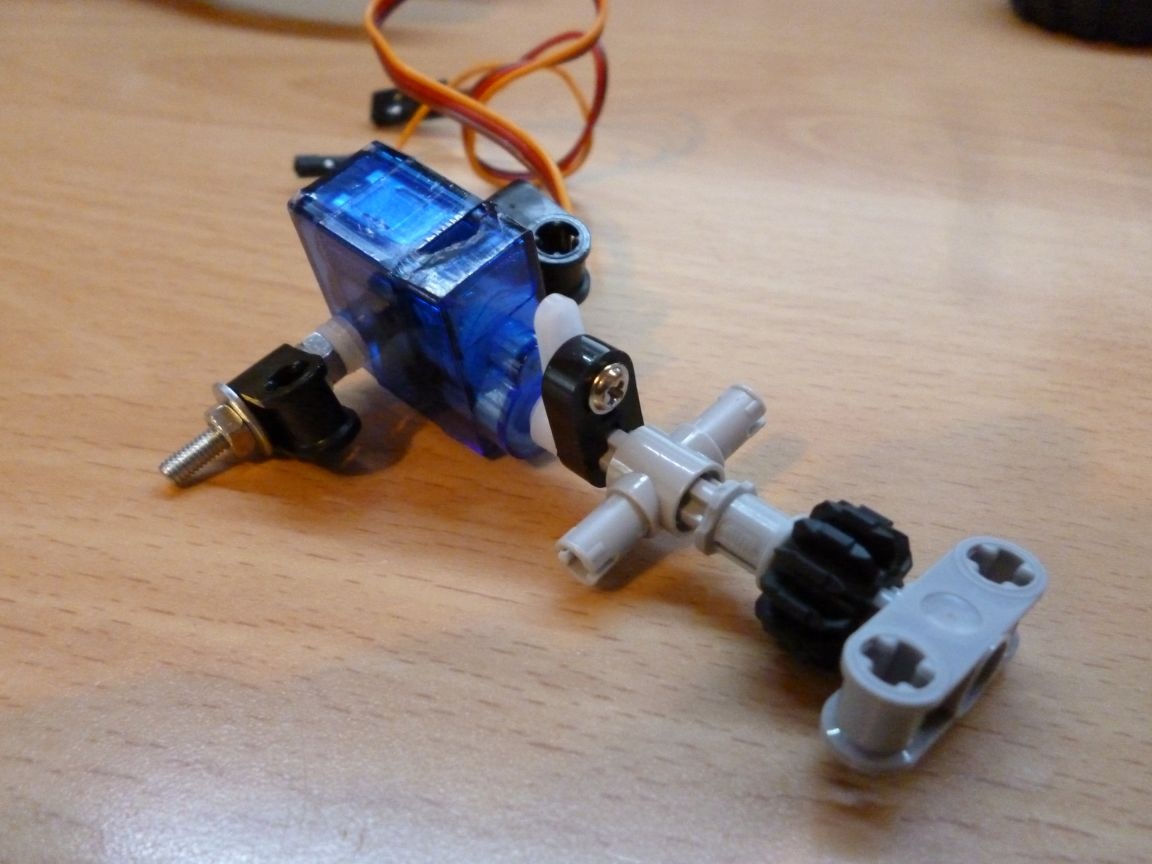
Sur l'arbre de servo, nous avons mis un levier avec une partie vissée de lego:
Et enfin l'assemblage pivotant:
Nous mettons sur le châssis:

Mettez sur les roues:
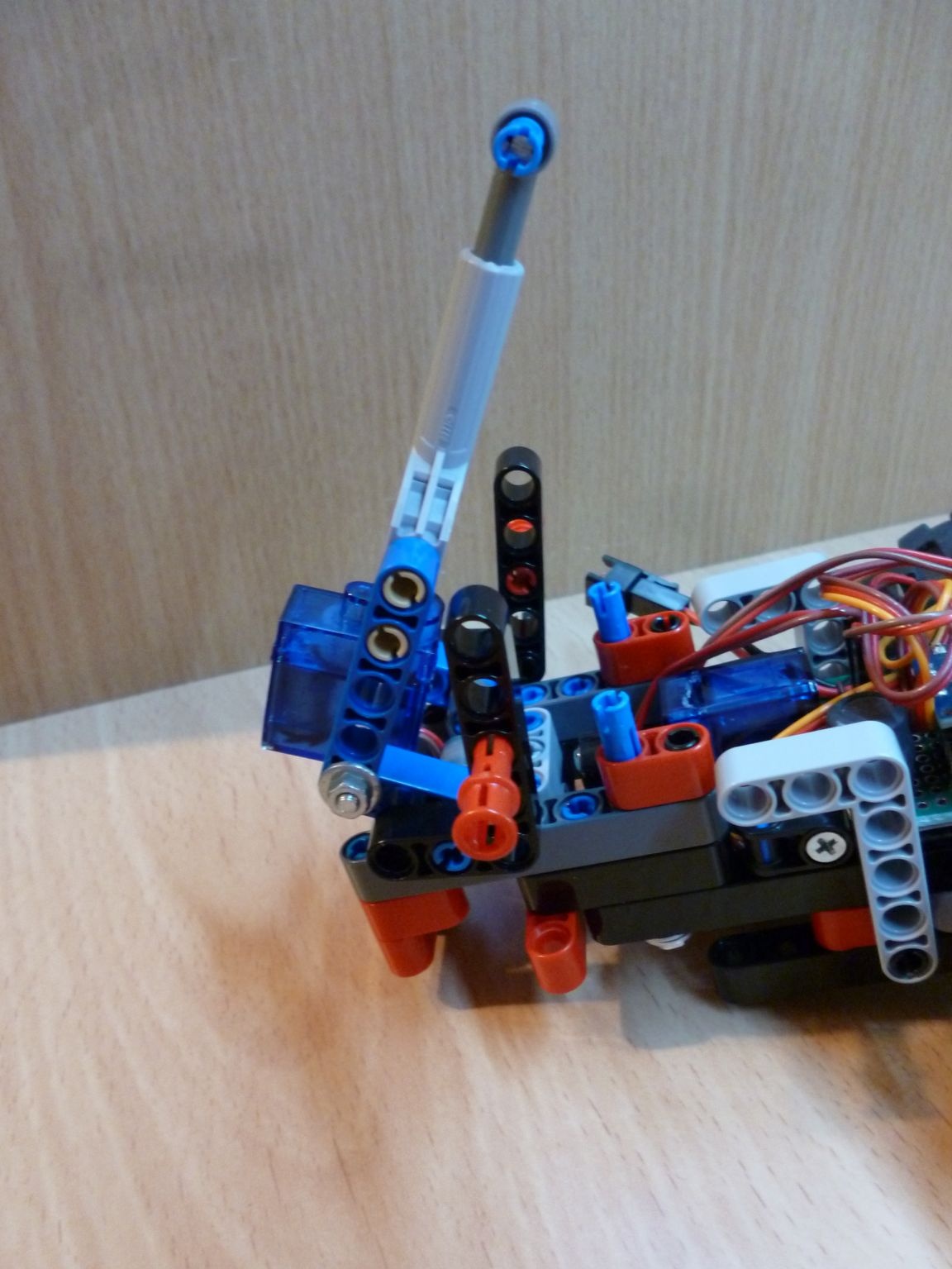
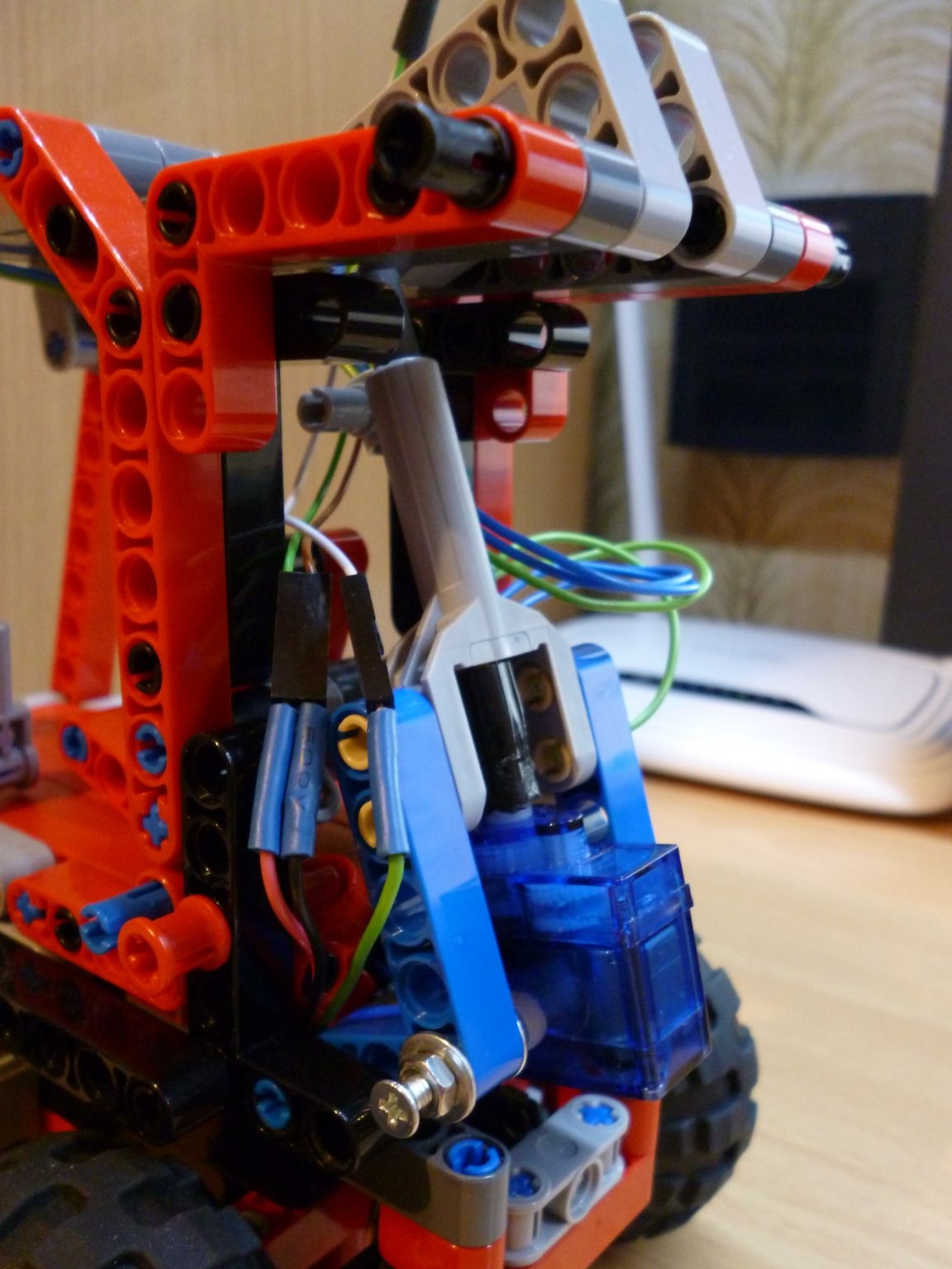
Étape 3 engins de levage.
Pour soulever le godet, il a fallu un servo modifié SG-90. Le but de sa modification est de retirer le contrôleur interne et de souder les fils directement au moteur afin de fabriquer un motoréducteur à partir du servo-variateur, c'est-à-dire de sorte qu'il puisse tourner complètement. Ainsi que dans le premier servo, vous devez faire un trou traversant pour le montage:
Installer sur le châssis:
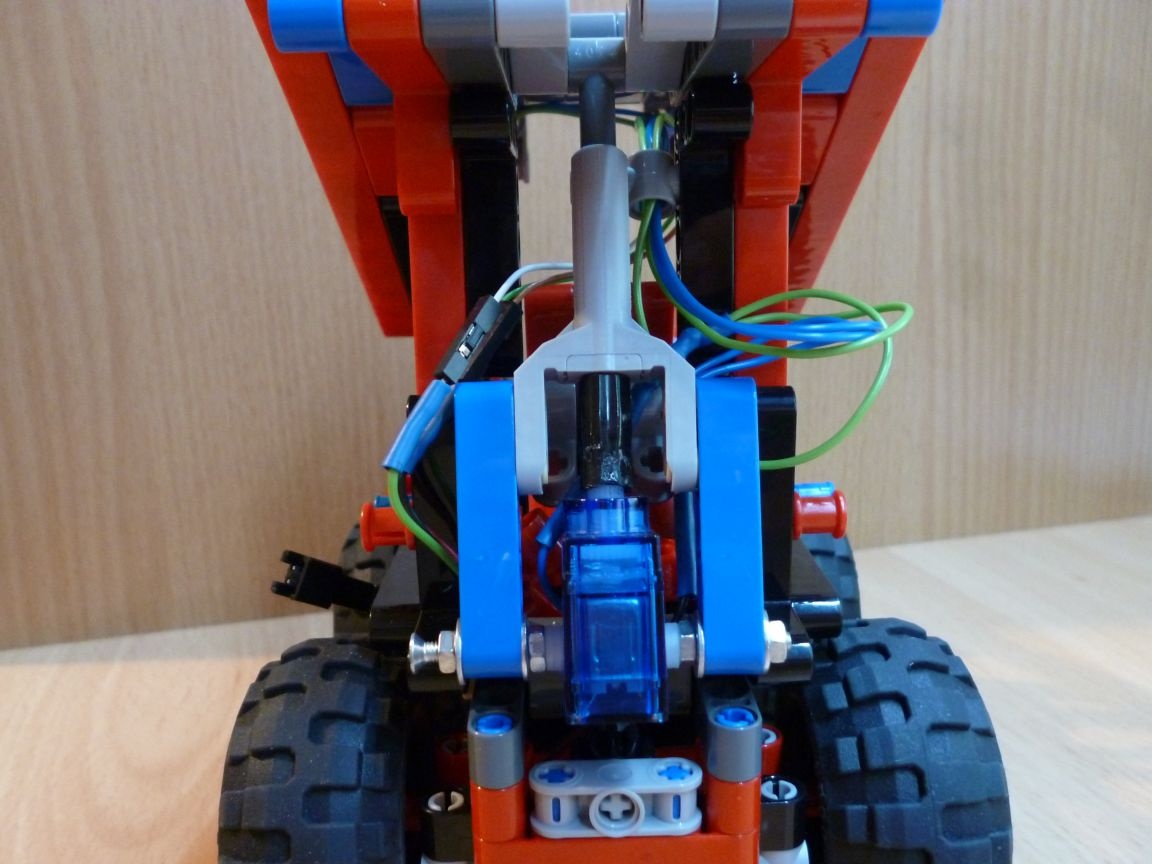
Étape 4 cabine.
Il est nécessaire de monter une cabine de lego technic à partir de photographies:

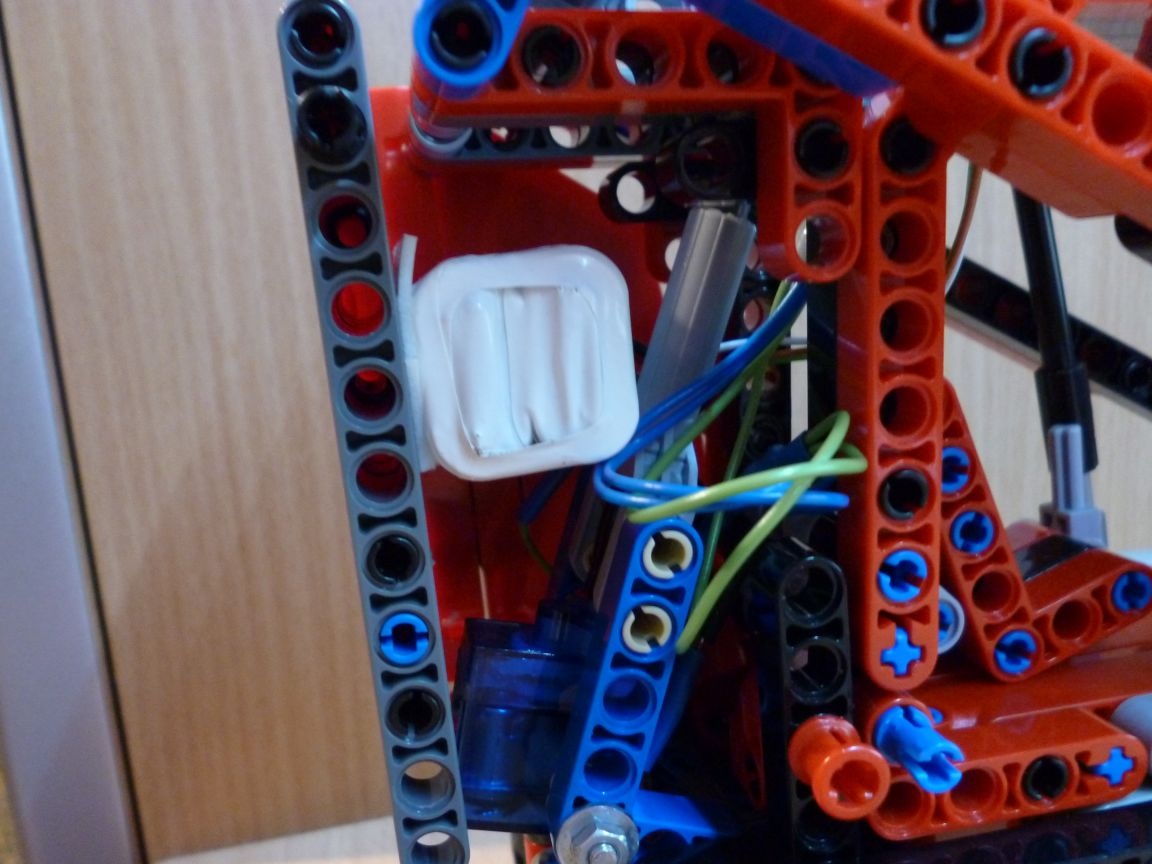
L'étape 5 est un électricien.
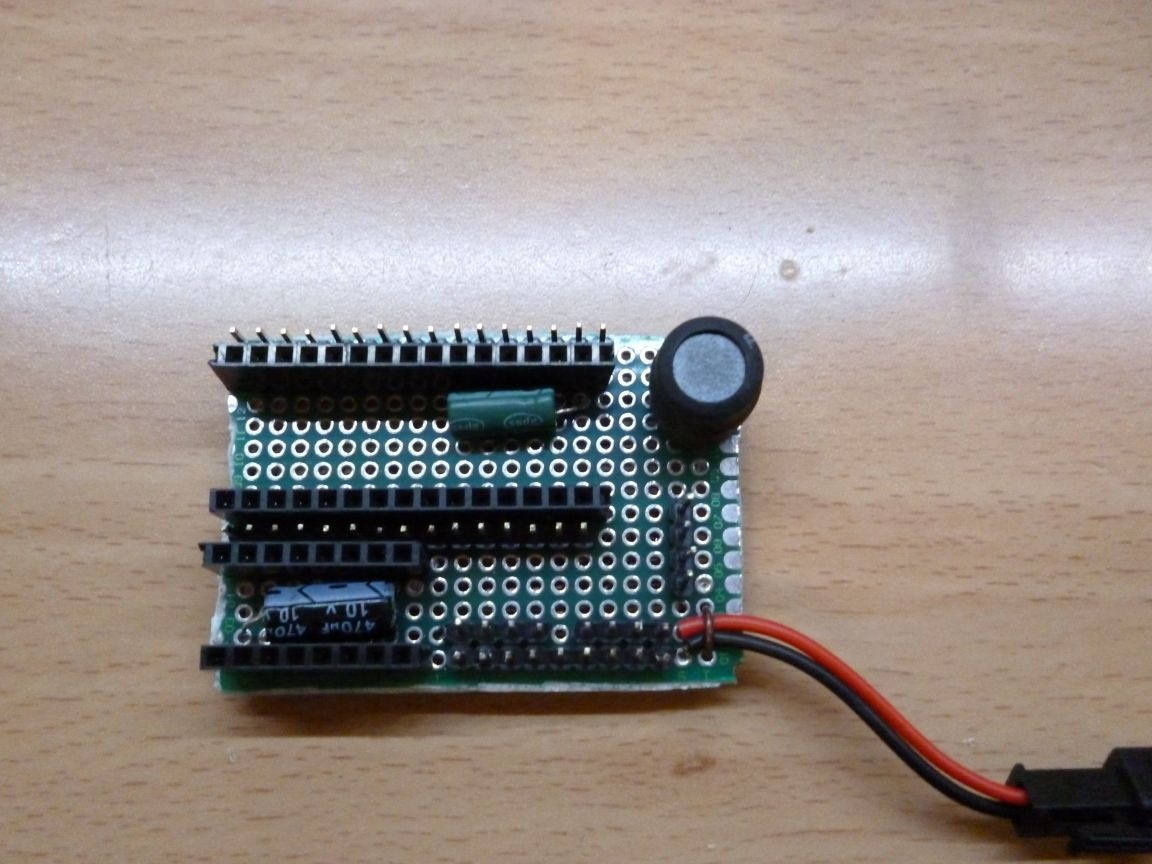
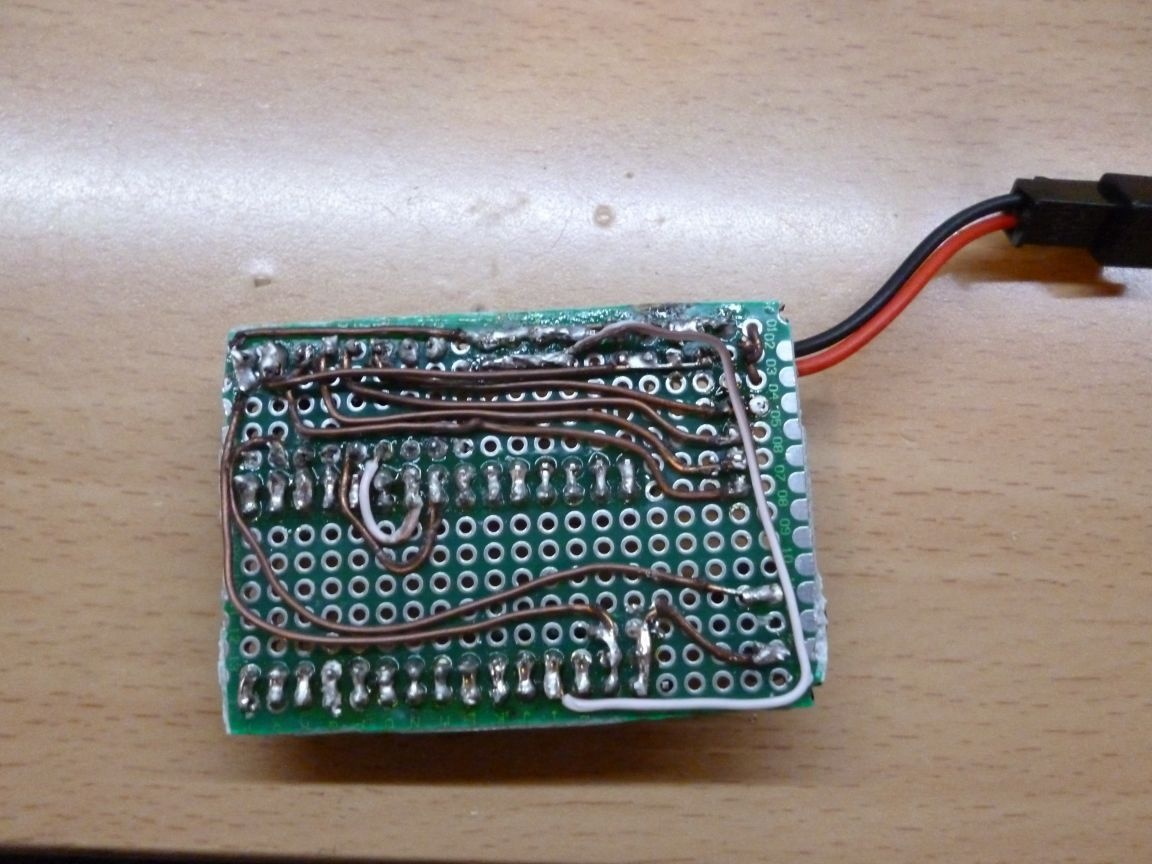
Ici, vous devez prendre un fer à souder. Pour plus de commodité, vous devez tout souder sur la carte de circuit imprimé selon le schéma suivant:
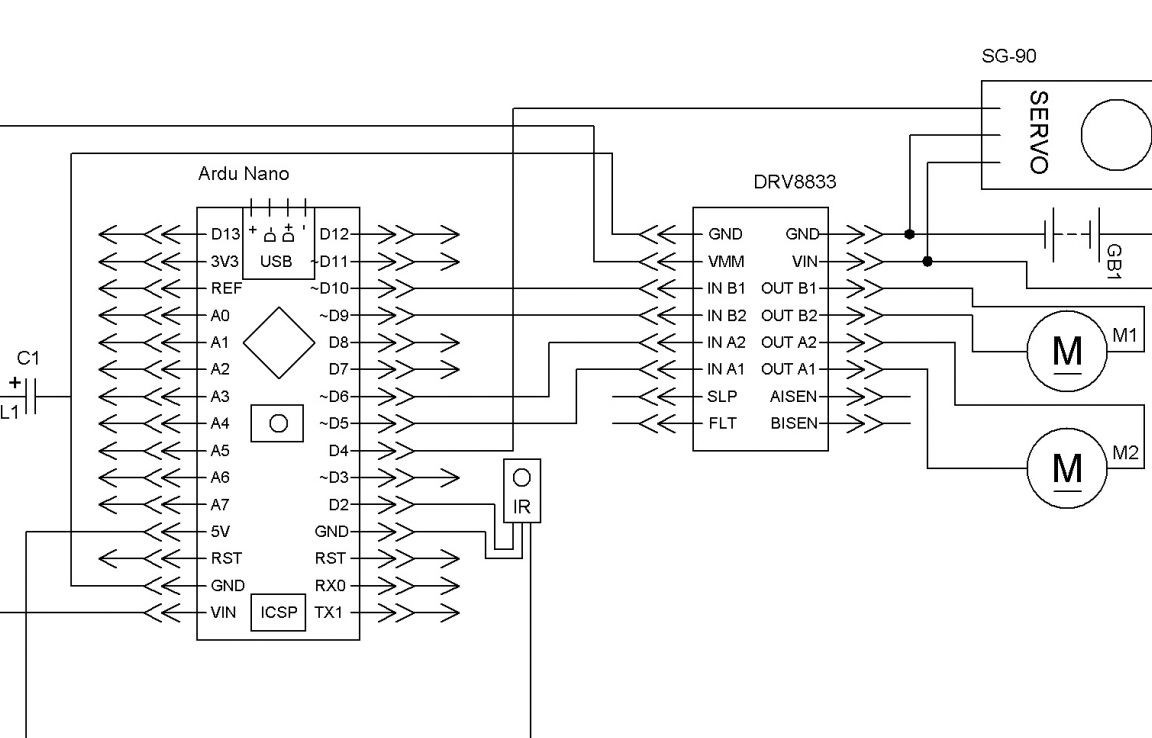
Je pense que cela vaut la peine d'expliquer un peu: vous pouvez prendre n'importe quel condensateur de faible puissance, vous pouvez également trouver un inducteur de toute sorte, cela est nécessaire pour stabiliser la tension du microcontrôleur. Les résistances doivent être sélectionnées pour les LED utilisées. J'ai pris un récepteur IR d'un vieux jouet, mais vous pouvez l'acheter dans un magasin de radio. S'il y a de fortes interférences, ajoutez un condensateur au circuit d'alimentation du récepteur IR.
J'ai compris ceci:
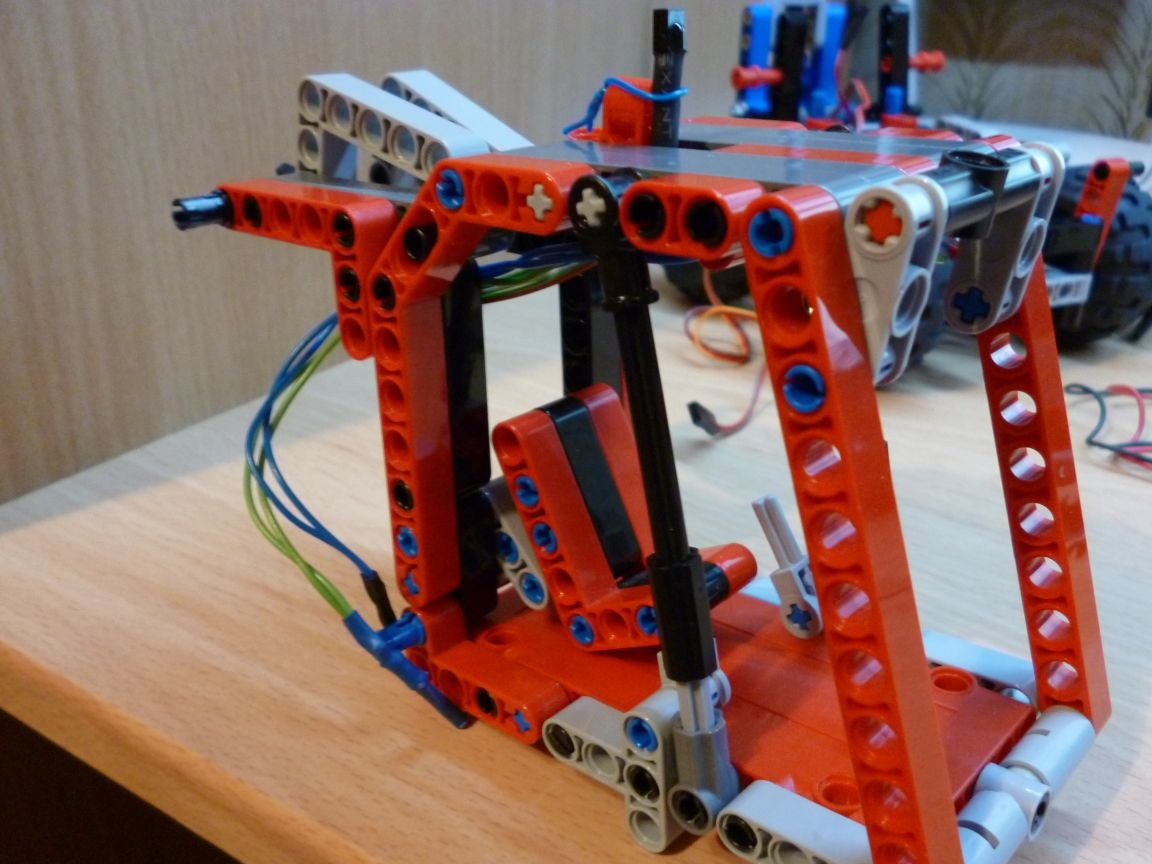
Nous installons Arduino Nano et DRV 8833 à leur place:
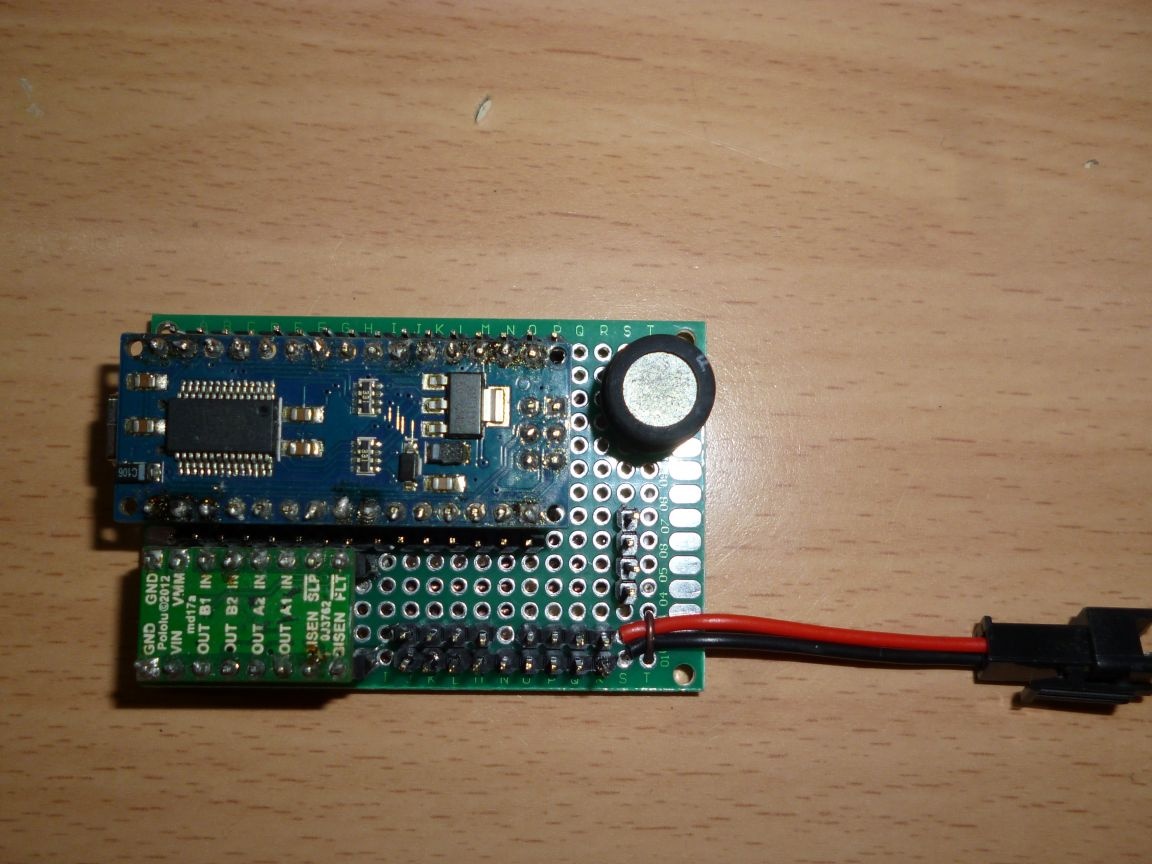
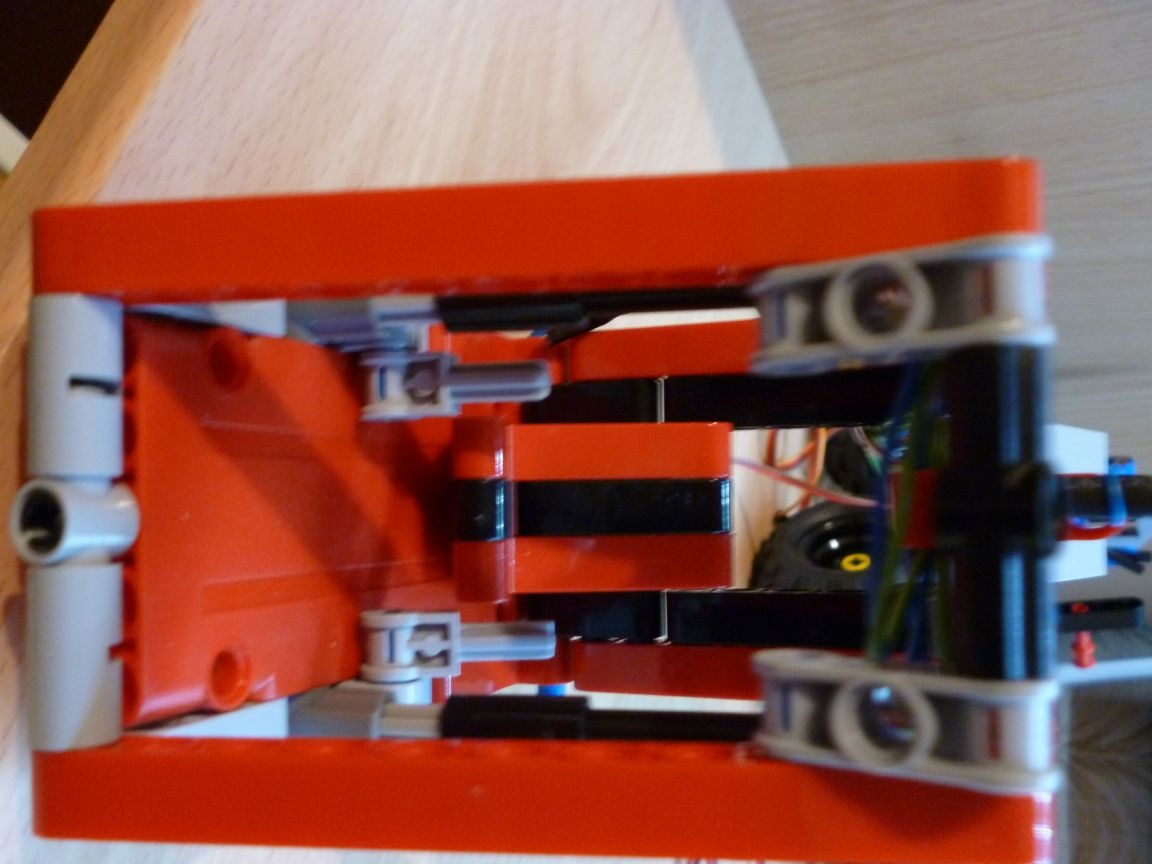
Et maintenant, nous avons mis la planche sur le châssis (retiré les roues pour plus de commodité):
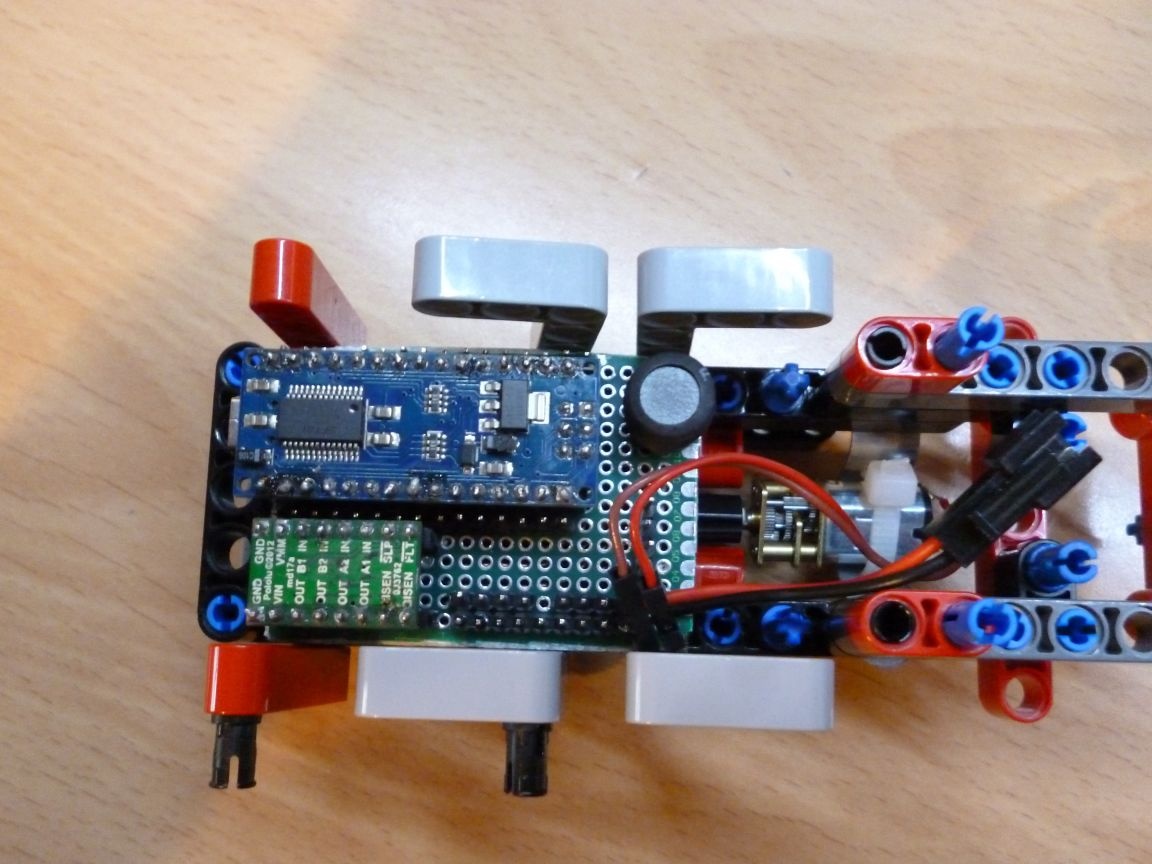
Pour l'alimentation j'ai utilisé 4 batteries Ni-Mn 1.2v 1000mA connectées en série et enroulées avec du ruban électrique. Je les ai collés sur du ruban adhésif double face sous le couvercle arrière de la cabine.
Étape 6 installation de la cabine.
Nous connectons le récepteur IR, les moteurs et les diodes selon le schéma, posons la cabine sur le châssis, fixons le godet (n'importe quel godet peut être réalisé):

Étape 7 firmware.
Je programme dans un IDE Arduino. Vous devez d'abord remplir mon firmware et à travers le terminal, regardez les codes de télécommande que vous allez utiliser. Vous pouvez prendre n'importe quelle télécommande infrarouge, par exemple, à partir d'un téléviseur ou d'un lecteur DVD. En cliquant sur un bouton dans le terminal, nous verrons le code du bouton enfoncé, écrivez-le sur une feuille de papier. Faites-le avec tous les boutons sur lesquels nous voulons programmer les actions du chargeur. Modifiez ensuite l'esquisse. Nous y inscrivons les codes que nous avons enregistrés pour les actions nécessaires et le flashons à nouveau.
Firmware
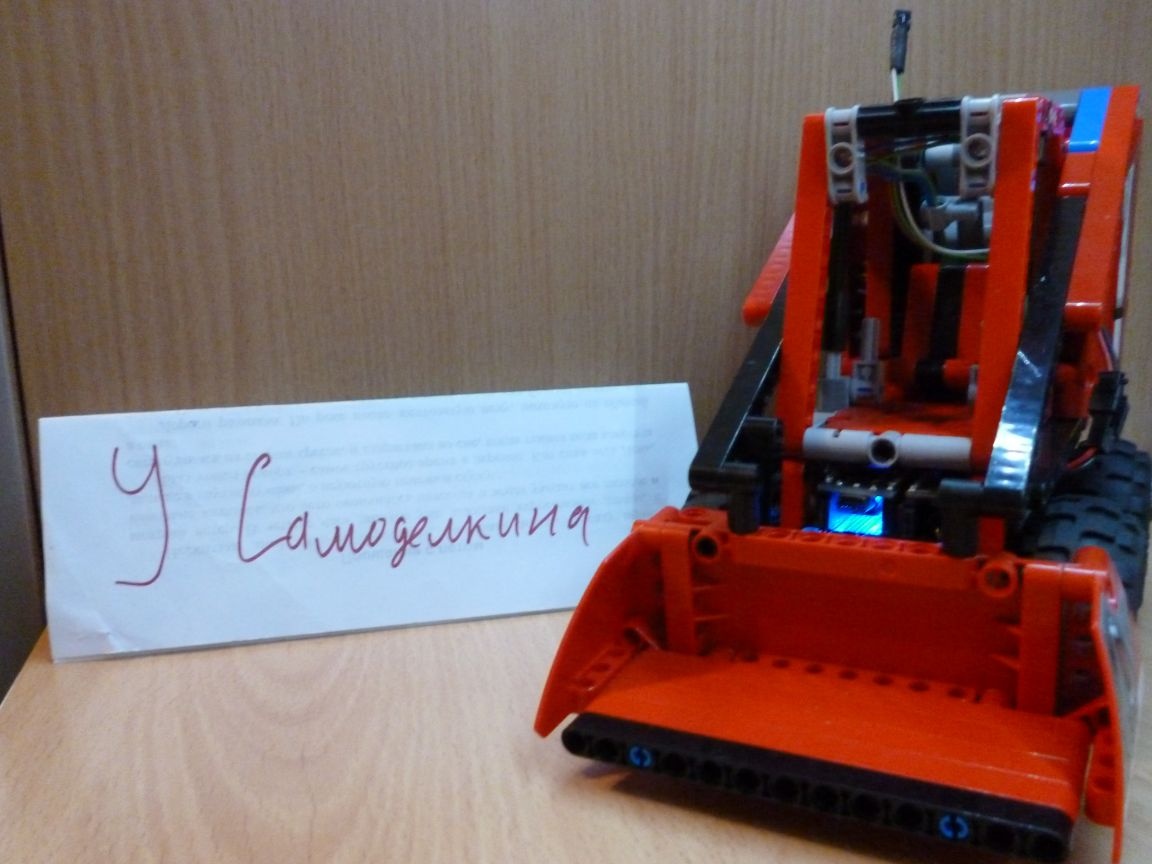
Vidéo du chargeur: