


Dans cet article, l'Assistant nous expliquera comment il a fabriqué un robot barman contrôlé par un smartphone.
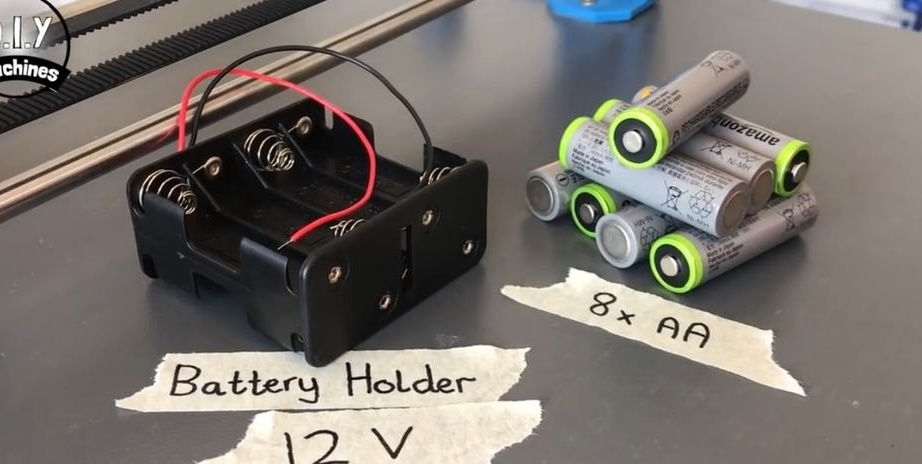
Caractéristiques de l'appareil: travail sur Arduino, prix abordable, contrôle bluetooth depuis n'importe quel gadget, autonomie (travail à partir de 8 piles AA).
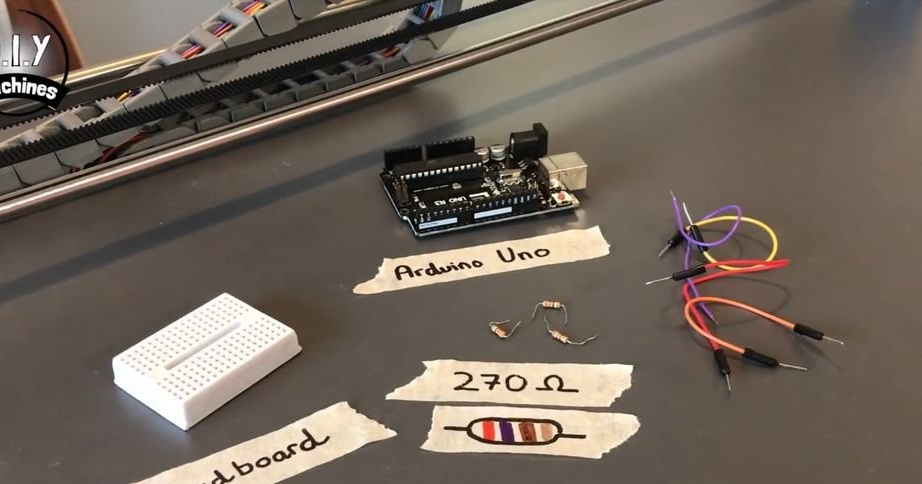
Pour construire un tel appareil, le maître a utilisé ce qui suit
Matériaux et outils:
-Arduino Uno;
-Moteur d'entraînement L293D;
- interrupteur à contact;
-Roulements linéaires;
-Moteur pas à pas;
-Courroie et poulie (version 2m);
-Courroie et poulie (version 5m);
-HM10 module Bluetooth;
-Un tournevis;
-Fixations;
-Jambes;
-Table de table;
-Imprimante 3D;
-Tiges en métal;
- tournevis;
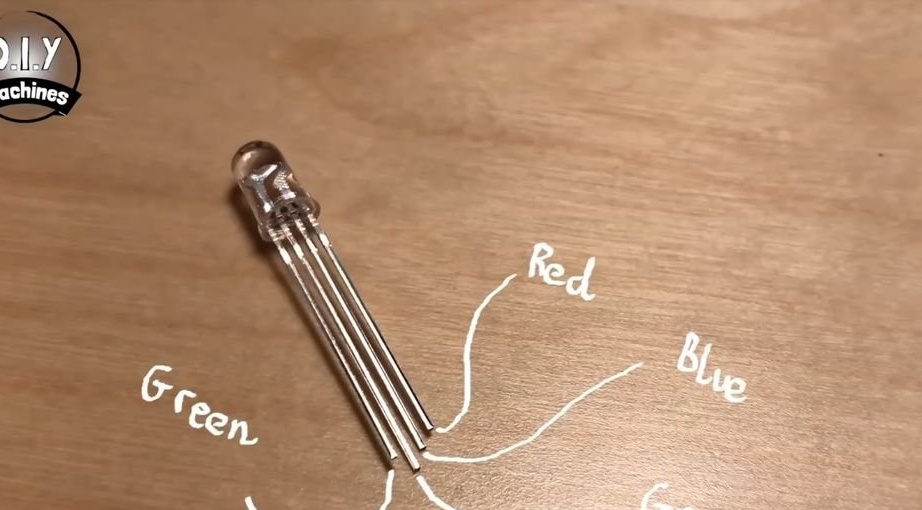
- LED RGB;
-Fil;
-Accessoires de soudure;
-Izolenta;
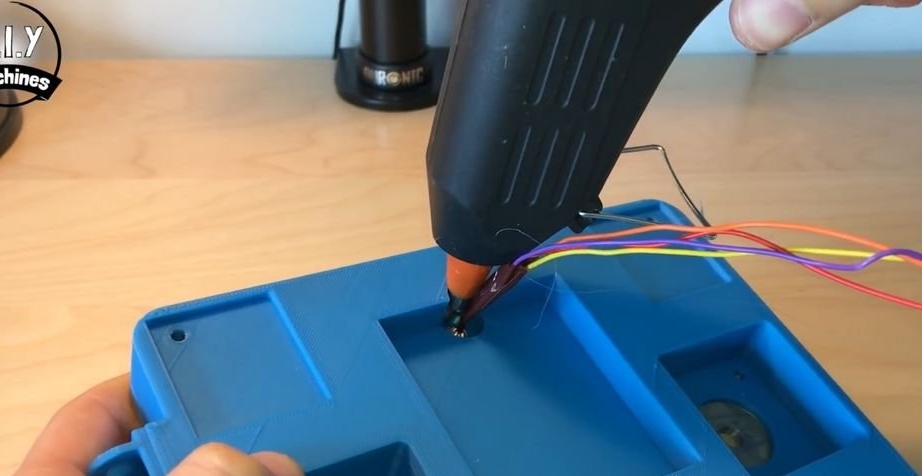
-Pistolet à colle;
-Compartiment à piles;
-Connecteurs;
-Batteries;
-Ordinateur avec logiciel;
- Supports pour bouteilles;
Soupape
-Bouteilles;
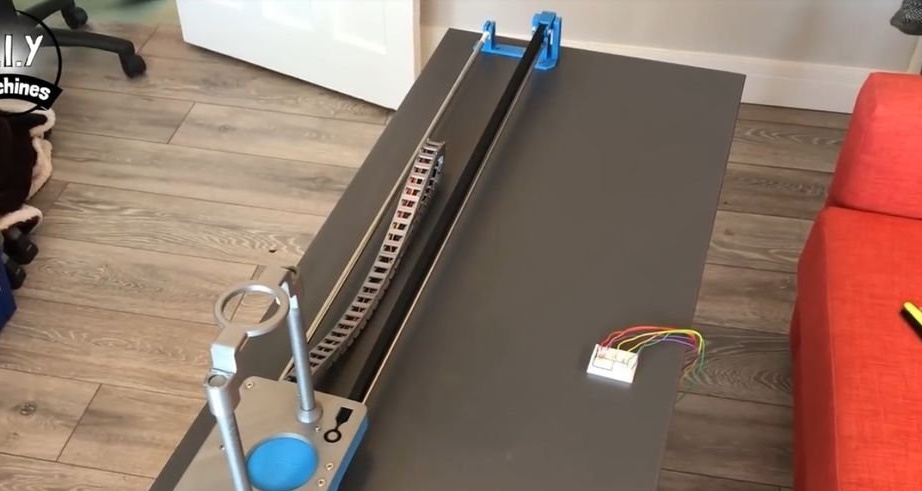
Première étape: la table
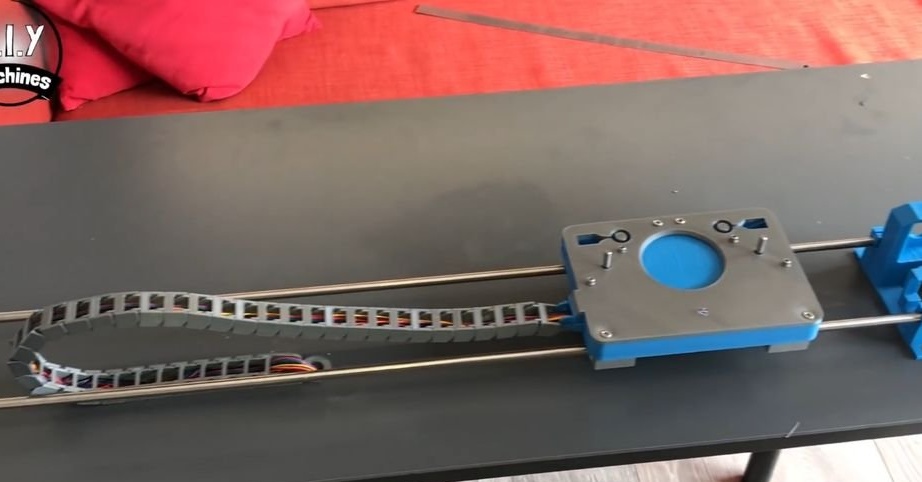
Tout d'abord, le maître récupère la table. Taille de la table 120 * 45 cm, épaisseur du plateau 18 mm.


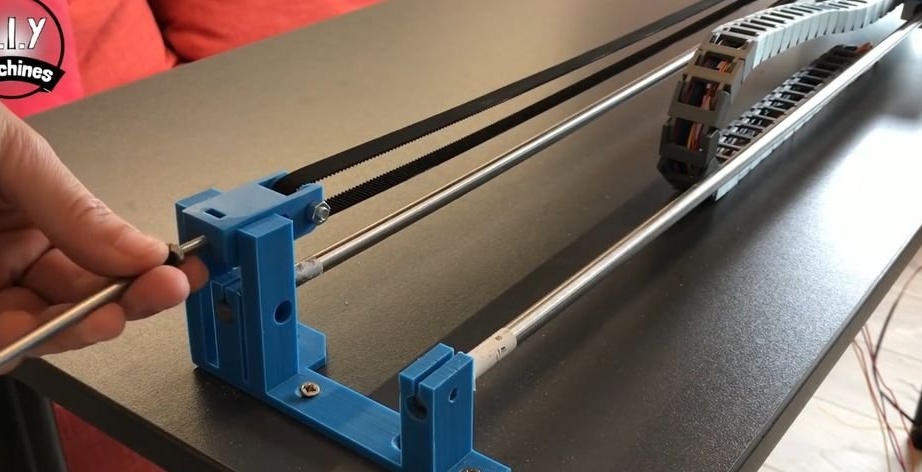
Deuxième étape: tendeur
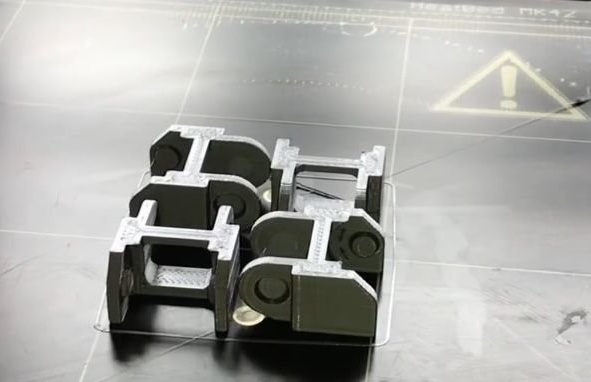
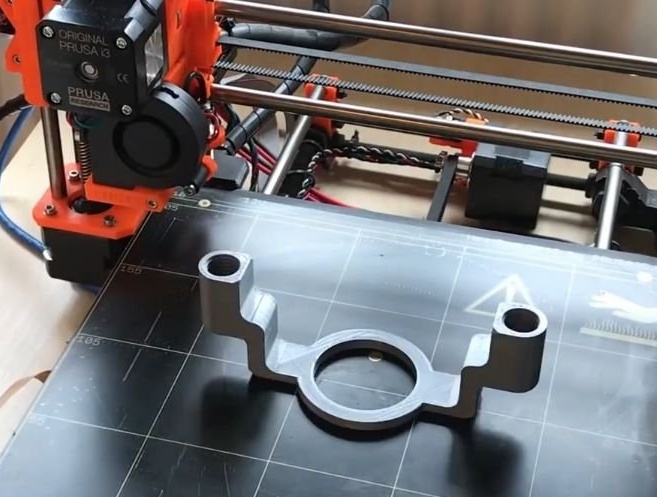
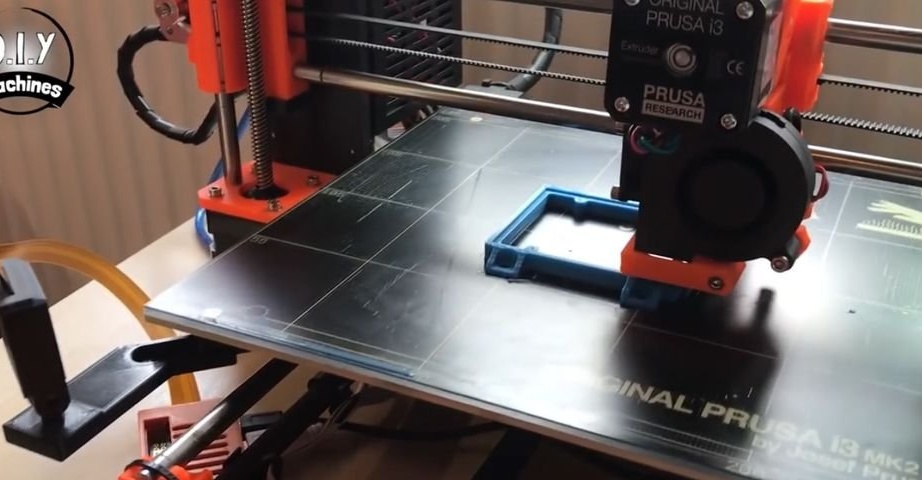
Les fichiers pour l'impression des pièces peuvent être téléchargés ci-dessous.
Fichiers d'impression 3D.
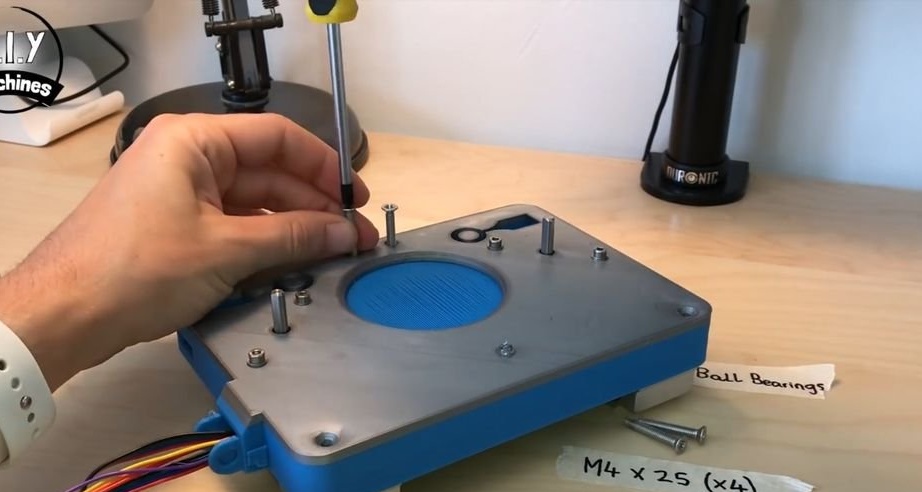
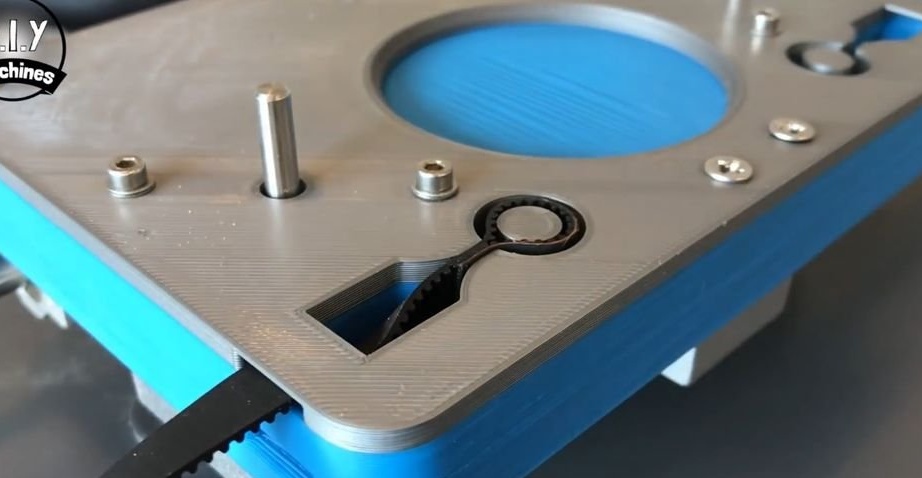
Il faudra maintenant imprimer les deux premiers détails «idler.stl» et «Rod_Clamp_V5.stl».
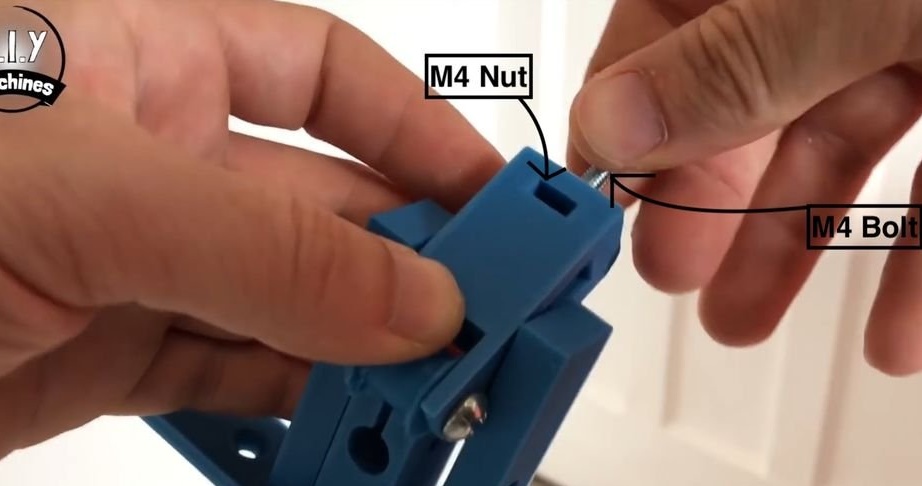
Après l'impression, il est nécessaire de fixer le galet tendeur au collier de tige à l'aide d'un long boulon M4 et d'un écrou. Un serrage serré n'est pas nécessaire, car le rouleau doit tourner librement.
Ensuite, les deux parties sont attachées ensemble.
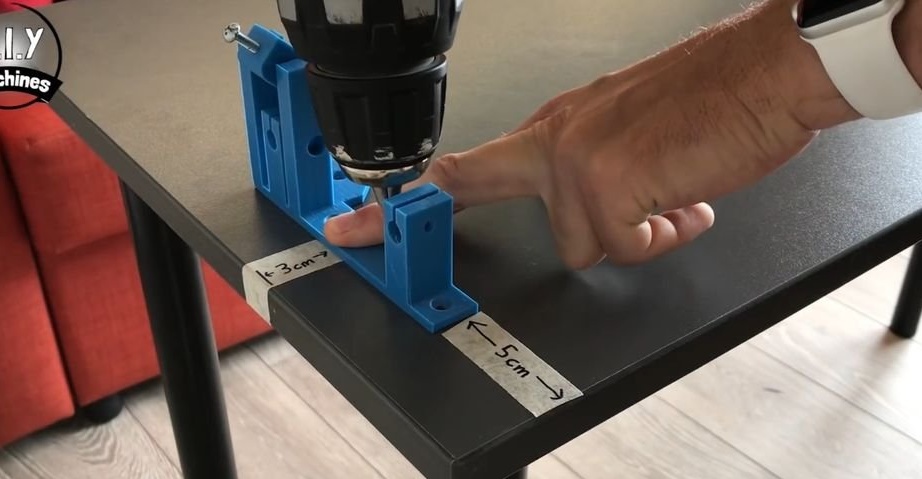
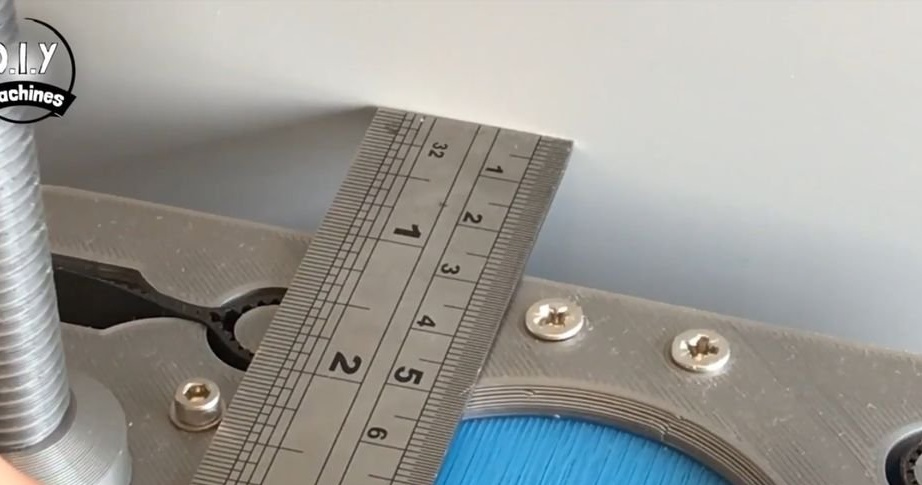
Marque sur une table à 3 cm de l'extrémité courte gauche et à 5 cm du bord avant et resserre le tendeur.

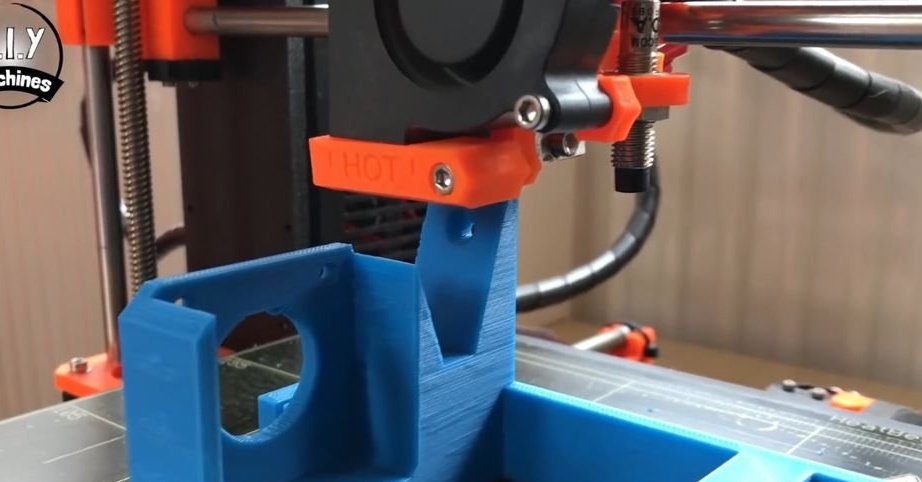
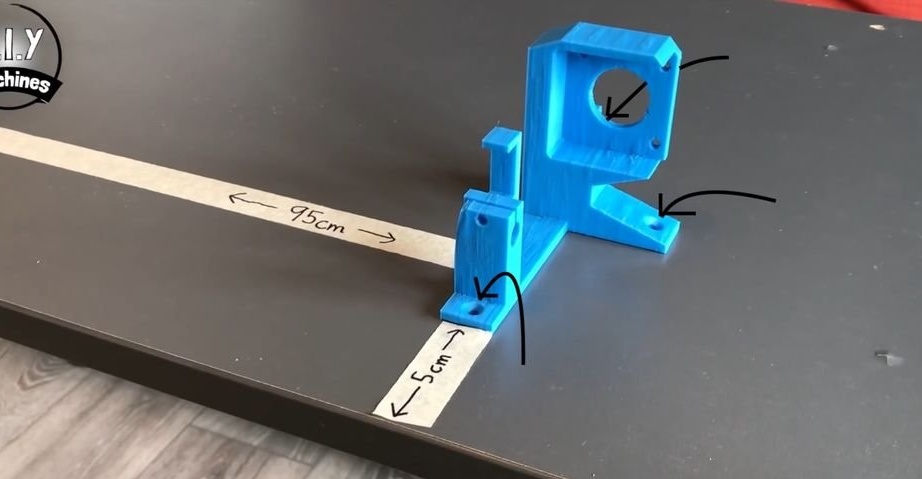
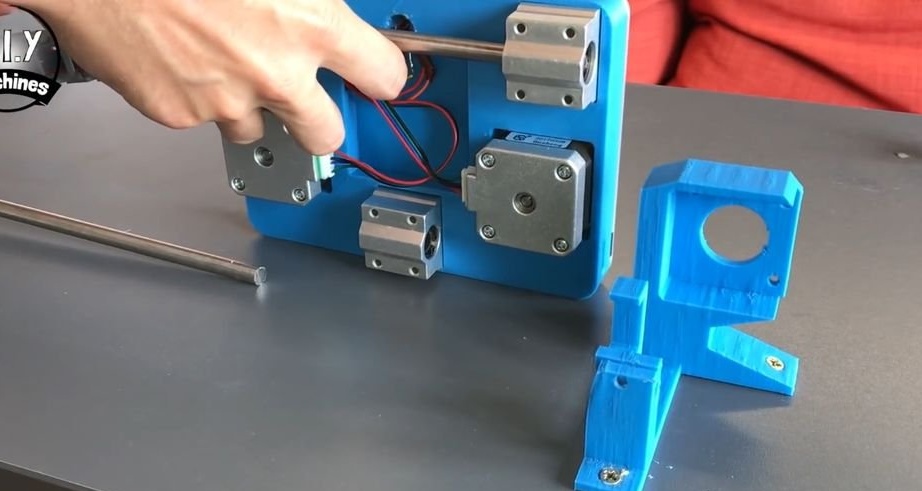
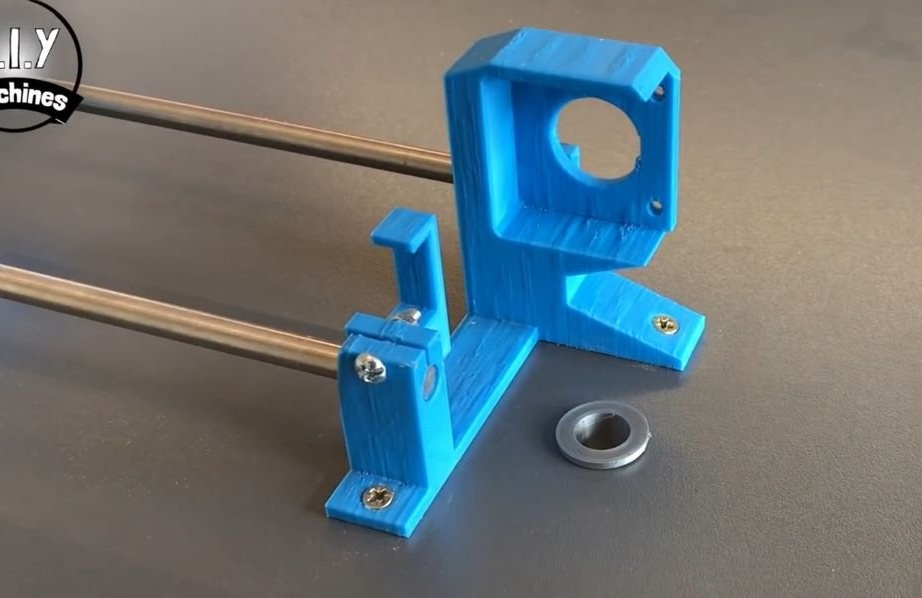
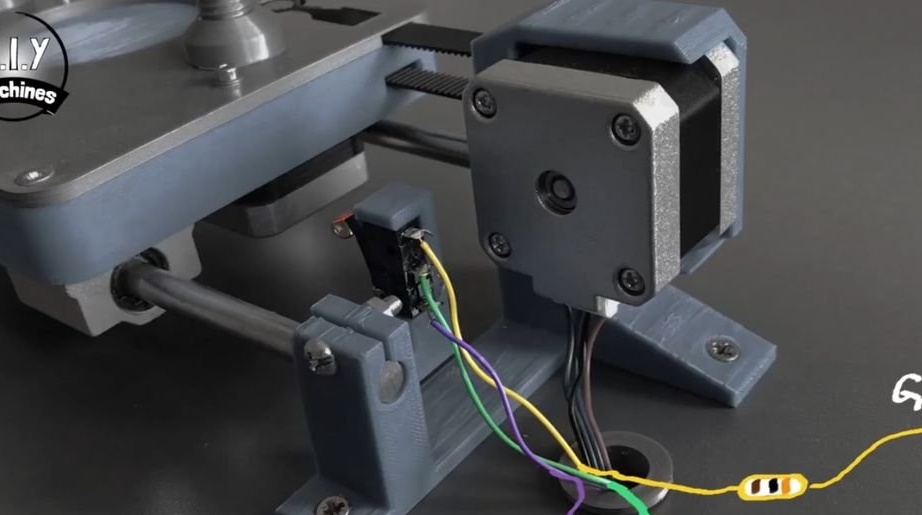
Deuxième étape: support moteur
Imprime le support moteur, fichier "X_Axis_Motor_Mount.stl". Se fixe sur le plateau à une distance de 95 cm du tendeur et de 5 cm du bord de la table.
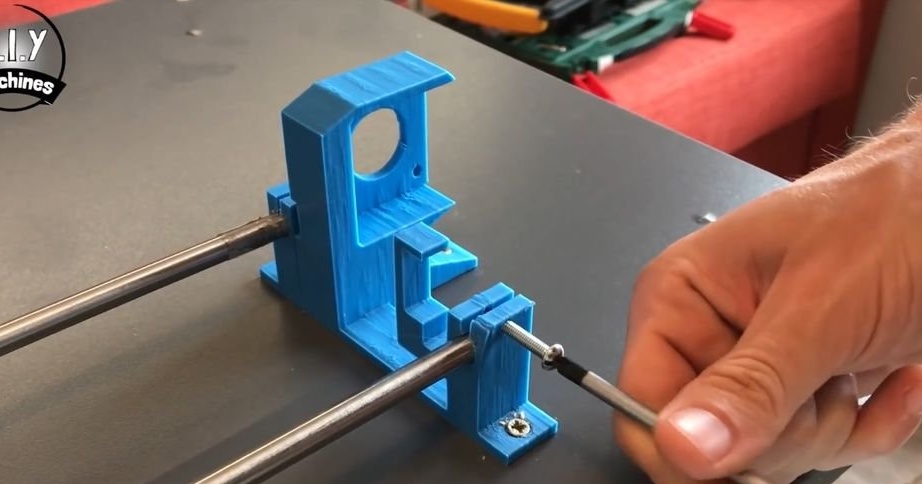
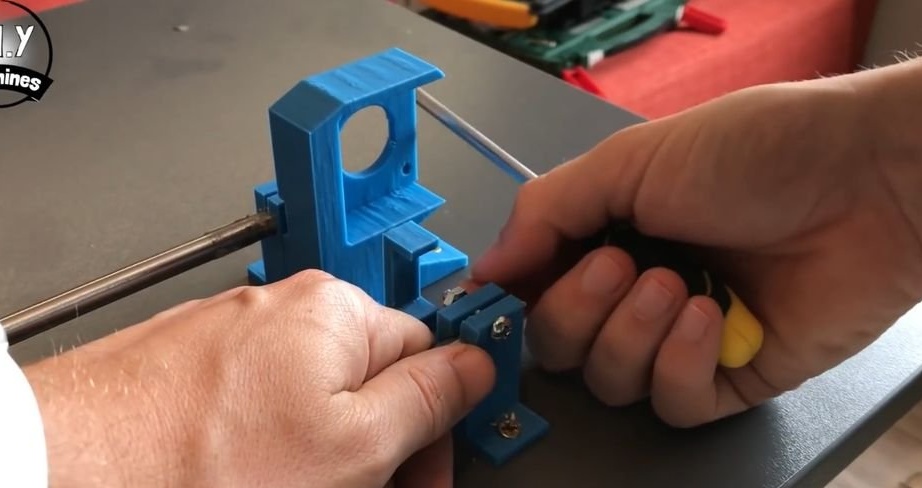
Troisième étape: guides
Définit des guides. La longueur des tiges est de 1 mètre.
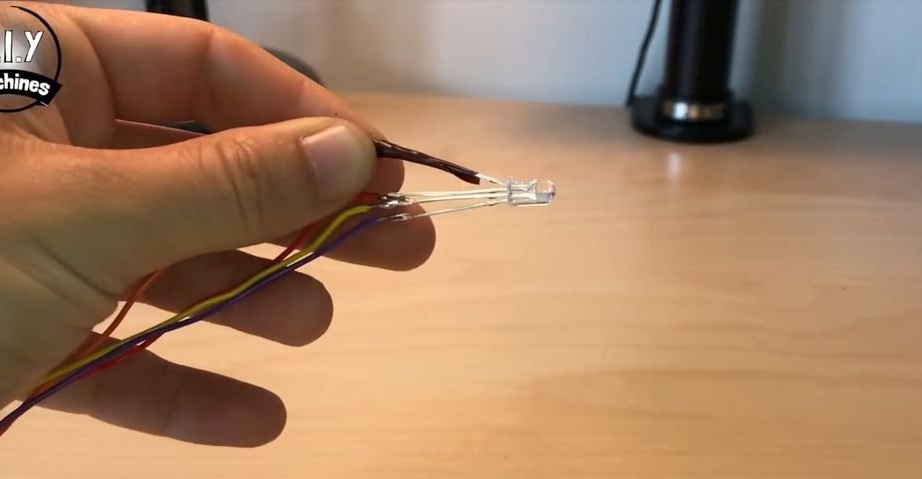
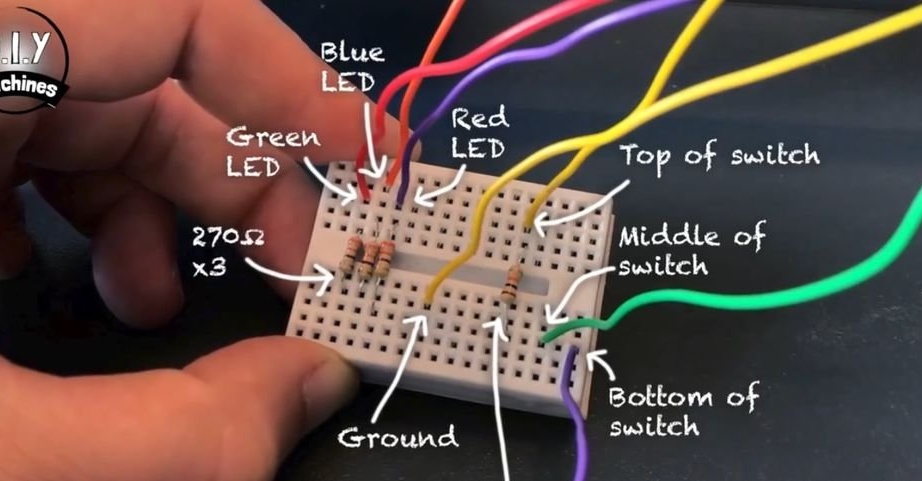
Quatrième étape: LED
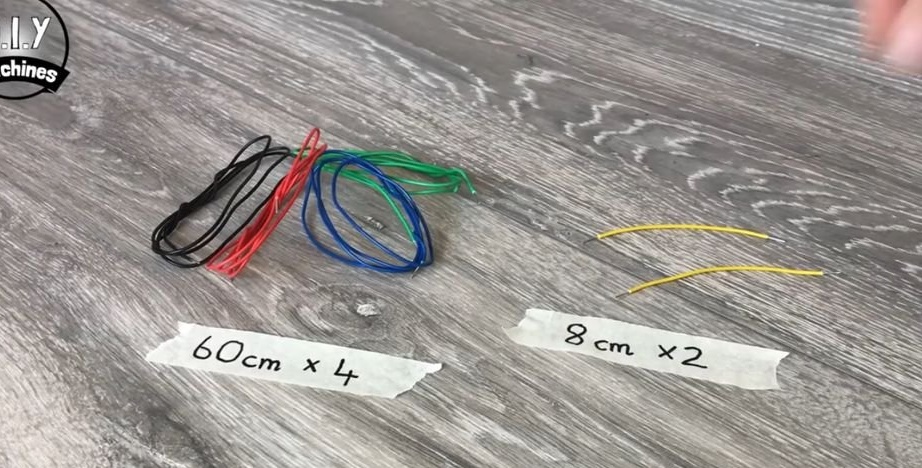
Le maître utilisera la LED RGB pour indication. Souder des fils de 180 cm de différentes couleurs à chaque jambe. La jonction isole.




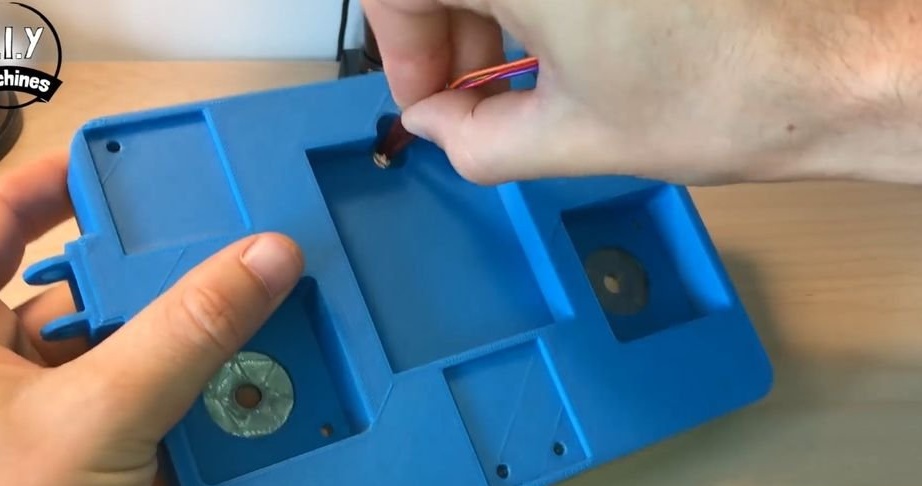
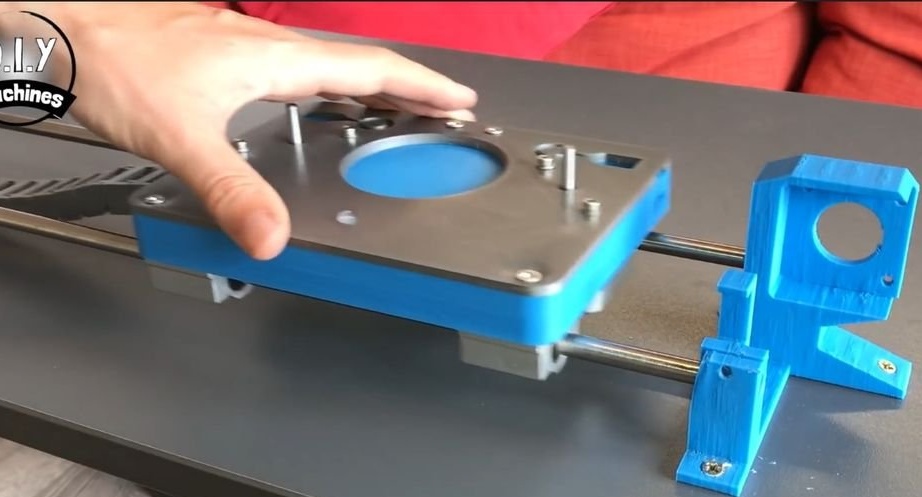
Cinquième étape: plate-forme
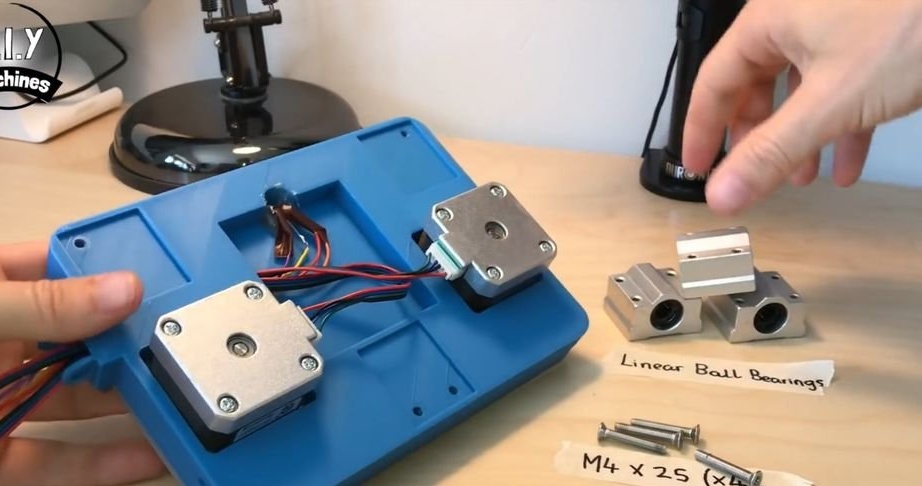
Imprime la partie 'slider_base_v3.stl'. Fixe une LED. Installer des moteurs pas à pas.
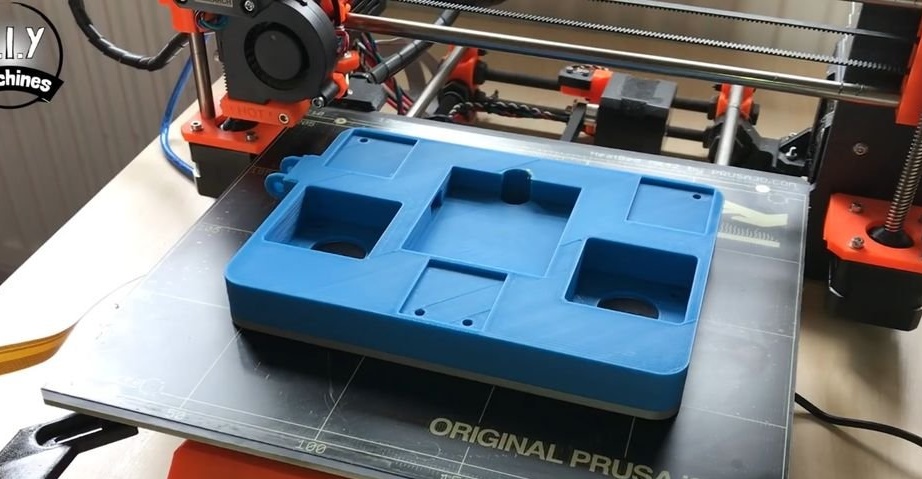

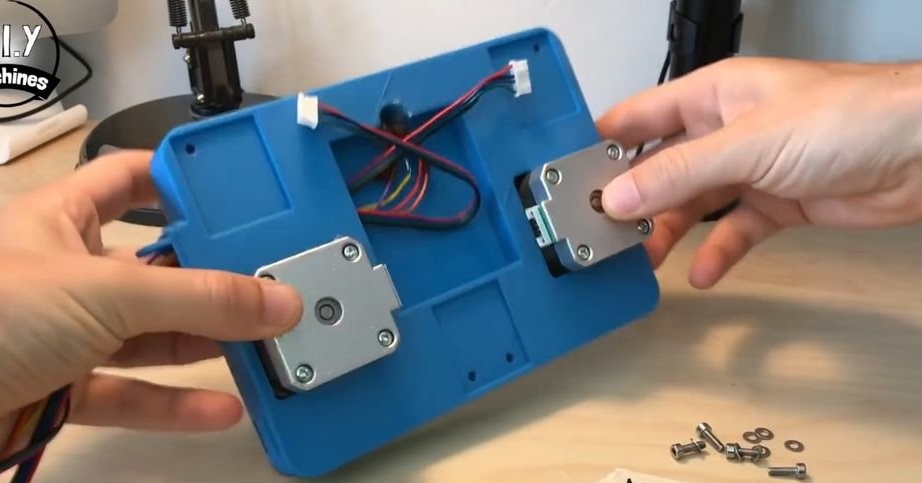
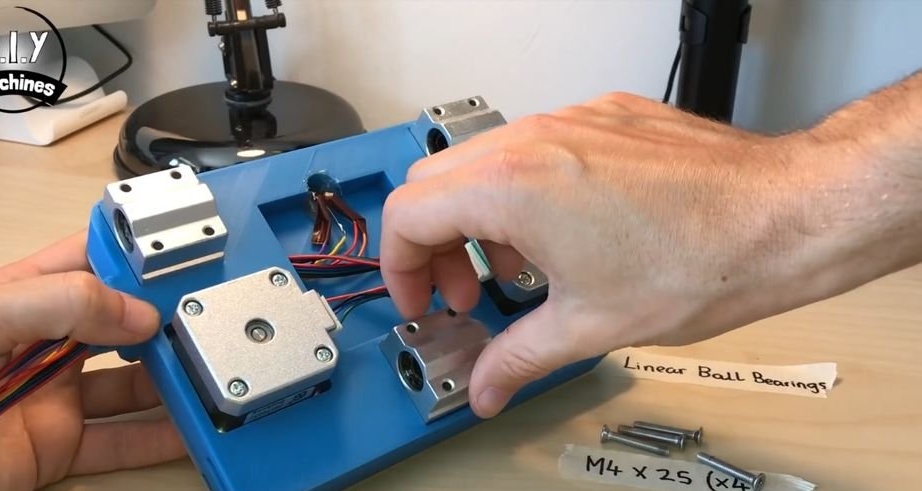
Installe des roulements linéaires.
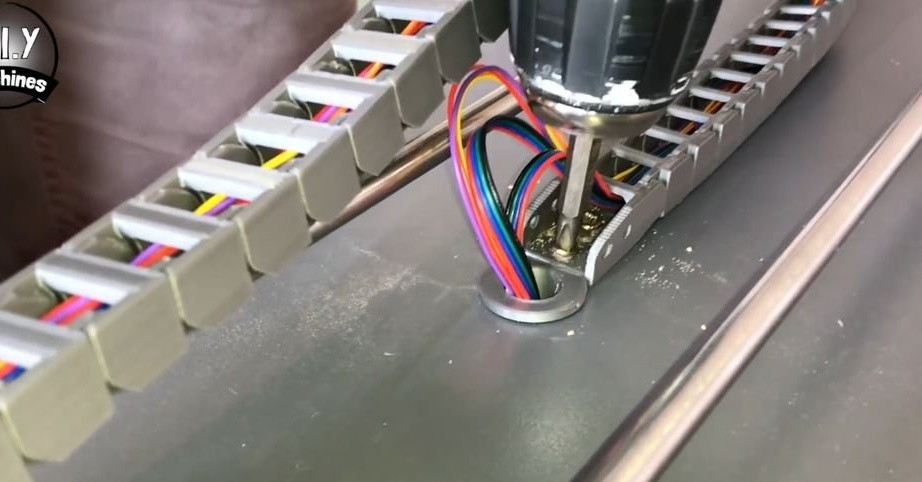
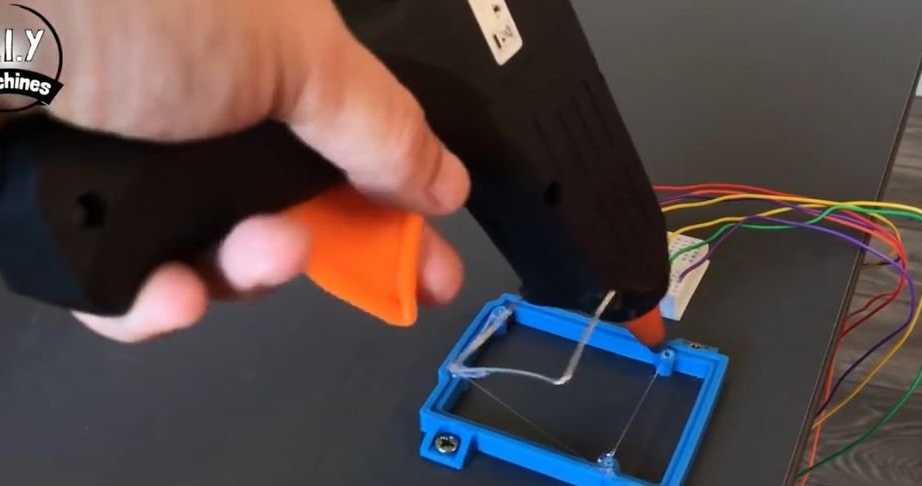
Étape six: Chaîne câblée
Le canal de câble de l'appareil se compose de segments séparés connectés en un seul circuit.A l'intérieur du circuit, des fils sont posés. La chaîne est mobile et se plie si nécessaire. Les segments de chaîne sont également imprimés sur l'imprimante.


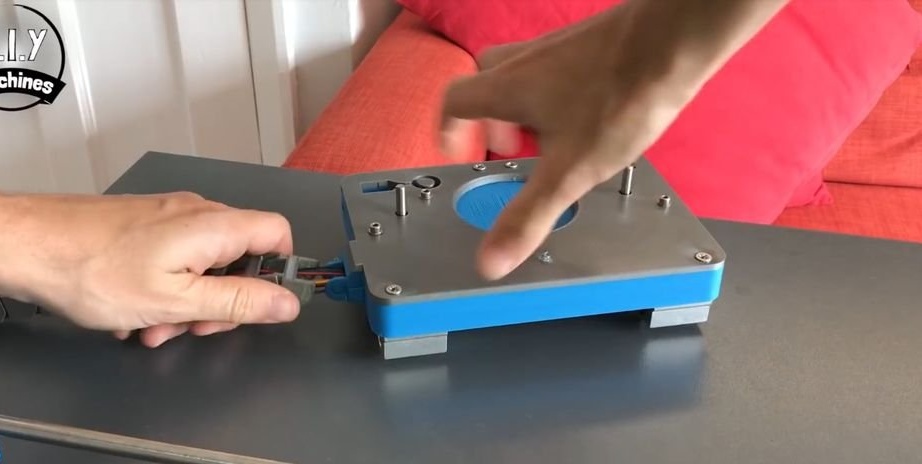
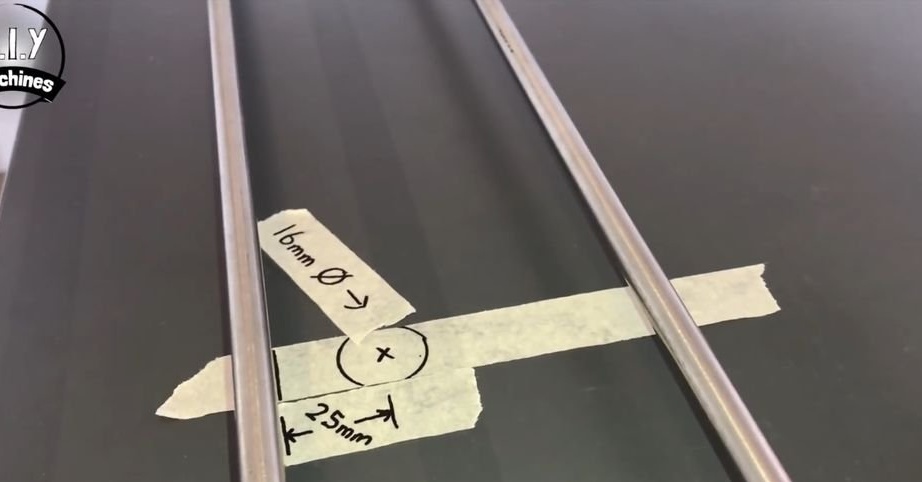
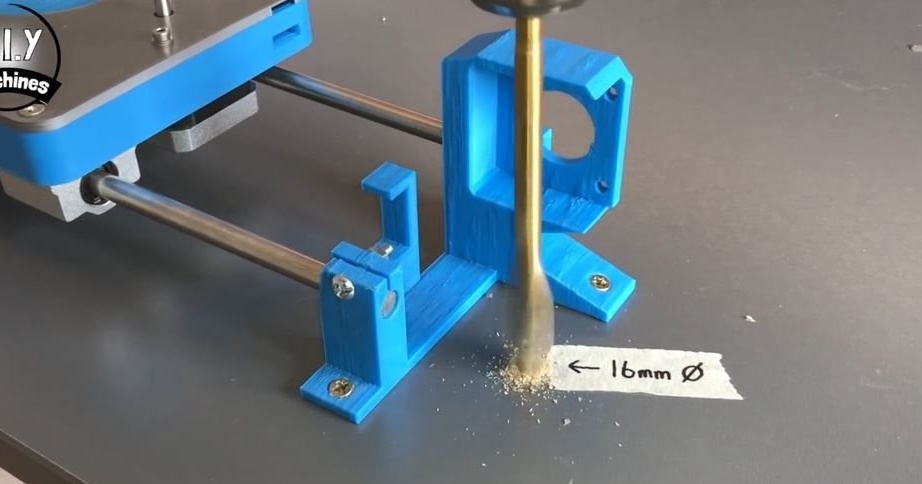
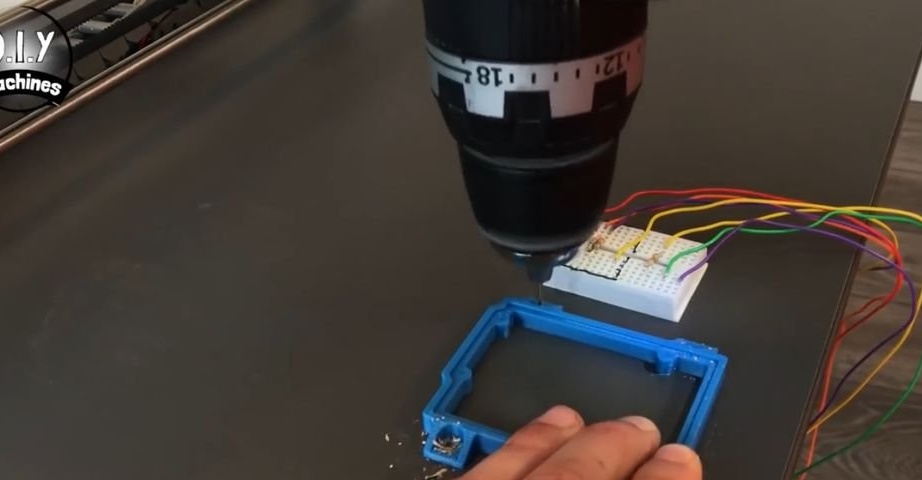
À une distance de 25 mm du guide extrême et de 47 cm du tendeur, perce un trou de 16 mm. Insère le manchon "Table_Tidy.STL" dans le trou. Fixe le canal de câble une extrémité sur la plate-forme, la seconde sur le comptoir à côté du manchon. Étire les fils.



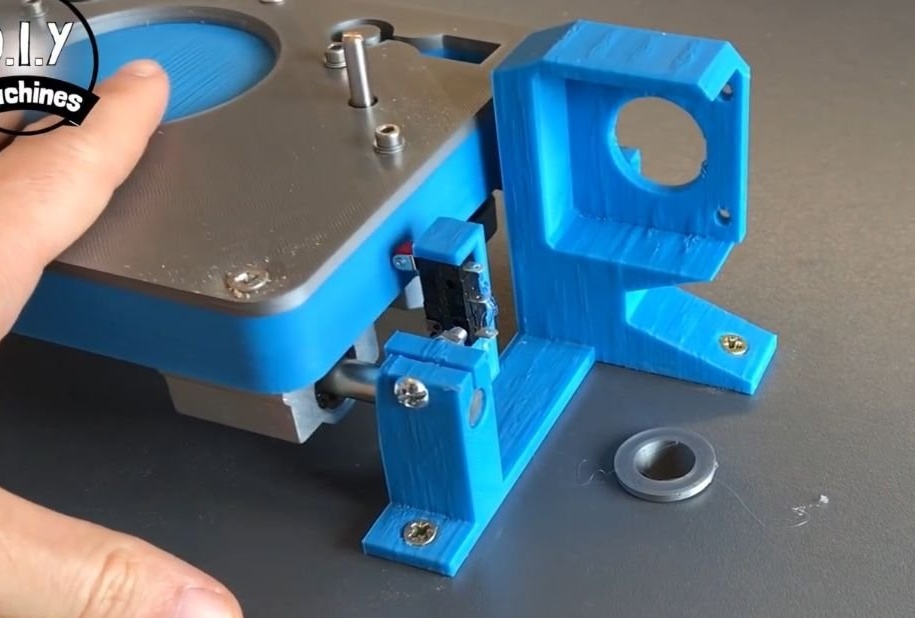
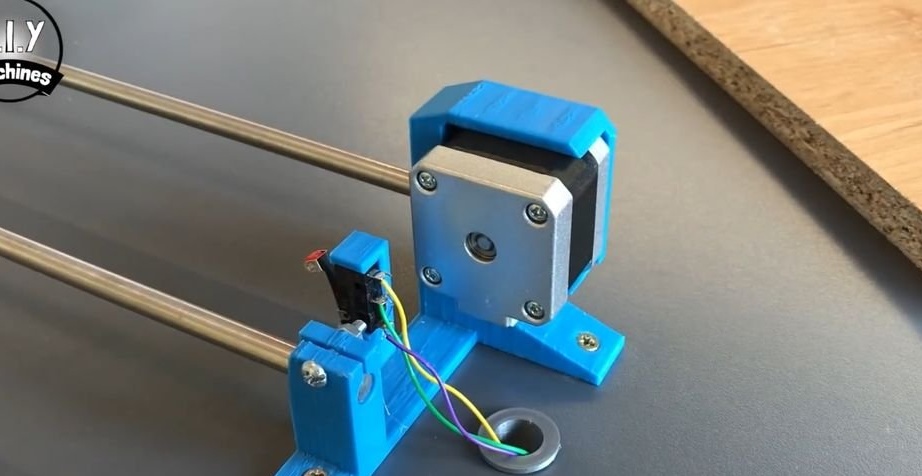
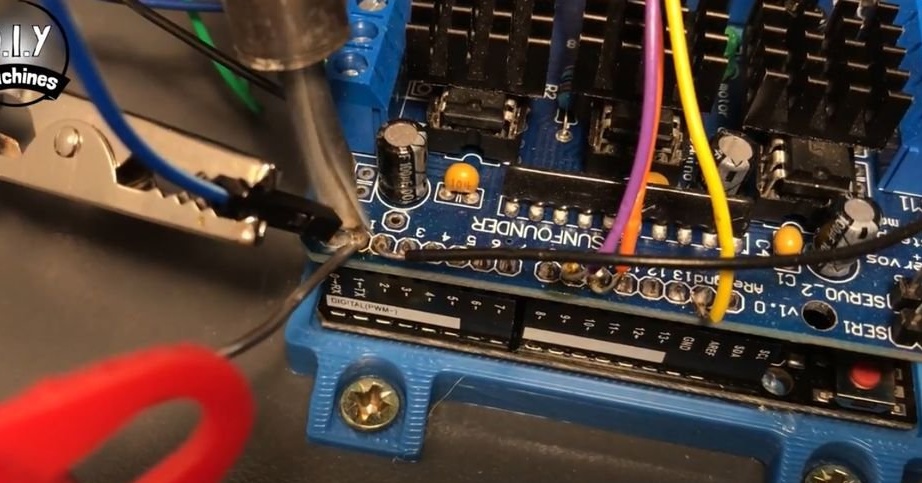
Septième étape: interrupteur
À côté du support moteur, un autre trou de 16 mm est percé. Insère une pochette dedans. Fixe la remorque au support. Souder à ses contacts pour 1 mètre de fil.

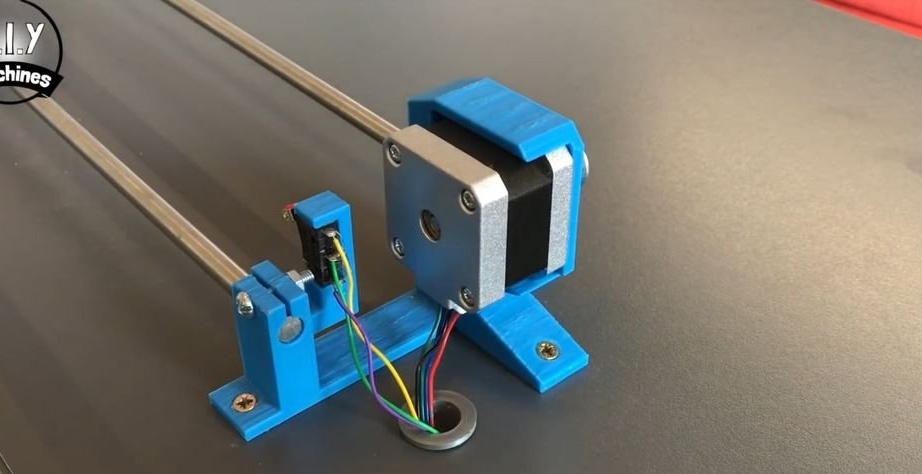
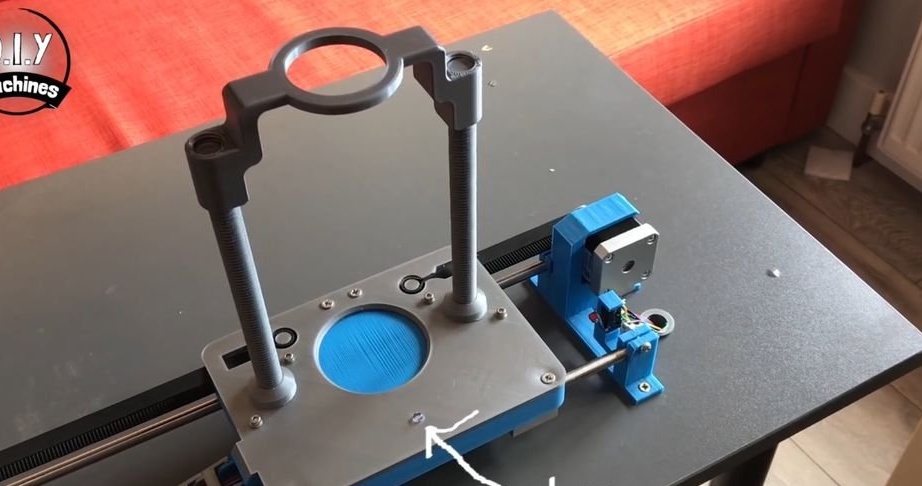
Étape huit: moteur de l'axe X
Sécurise le moteur à monter.

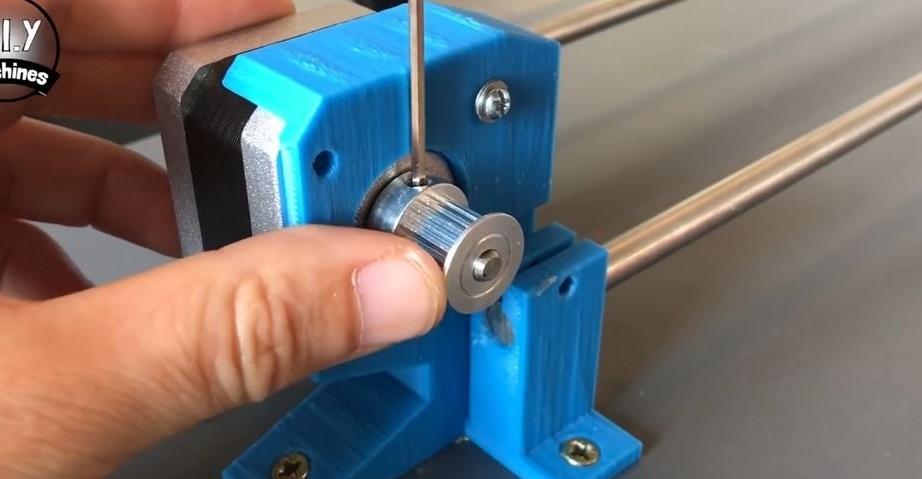
Étape neuf: ceinture
Fixe la poulie à l'arbre du moteur. Fixe l'extrémité de la ceinture aux supports de plate-forme. Tire la courroie à travers la poulie et à travers la poulie du tendeur. Fixe la deuxième extrémité aux supports. Si nécessaire, la tension de la courroie peut être ajustée en resserrant ou en dévissant la vis.







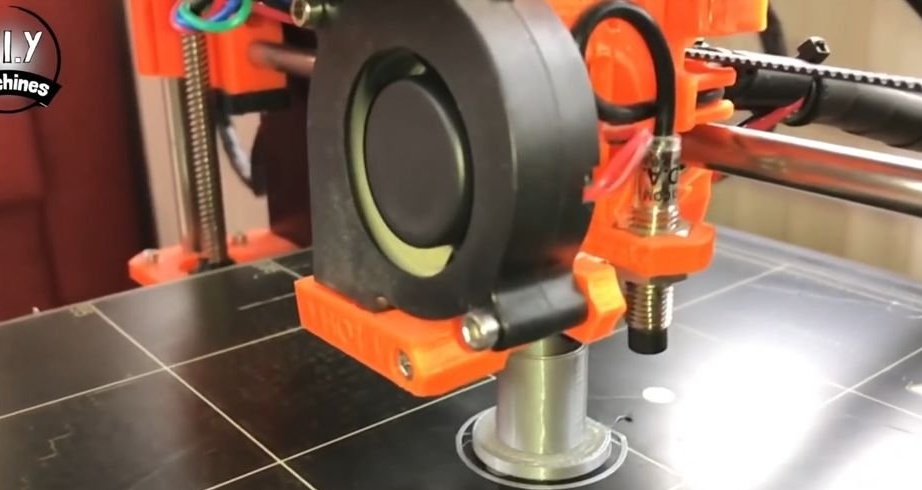
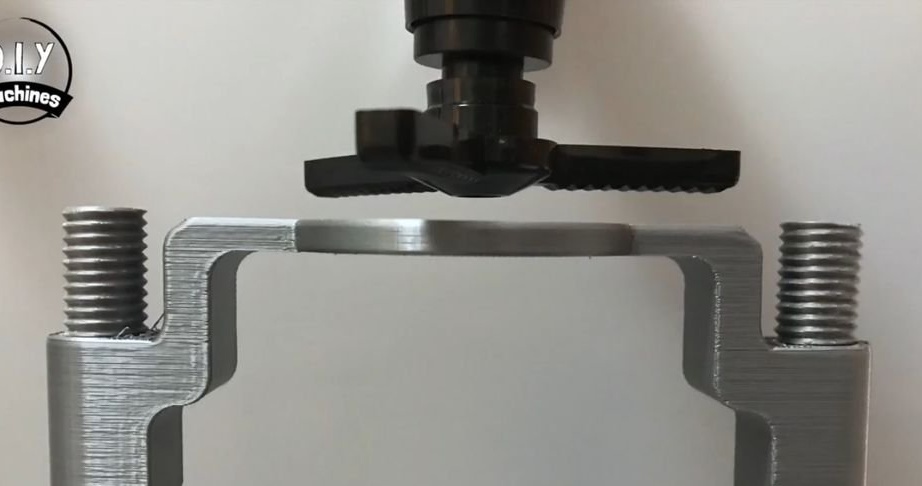
Étape dix: Porte-gobelet
Imprime deux tiges filetées main_rod2.3.STL et support Dispenser_Paddle_V2.STL. Se fixe sur une plate-forme.



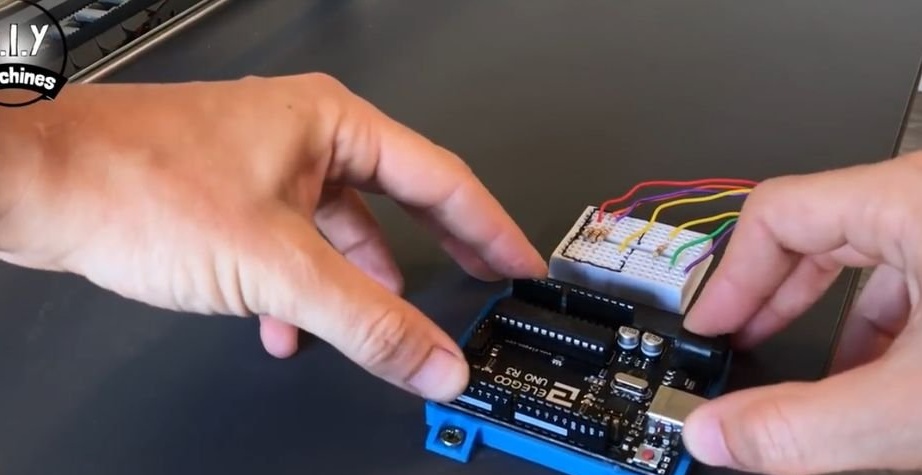
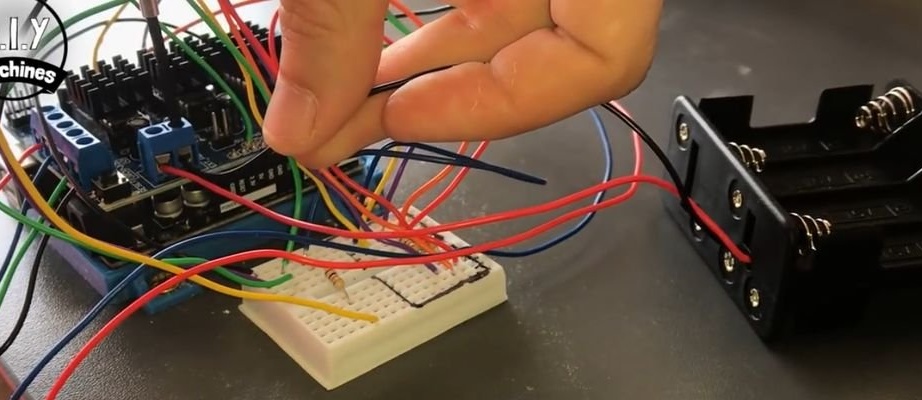
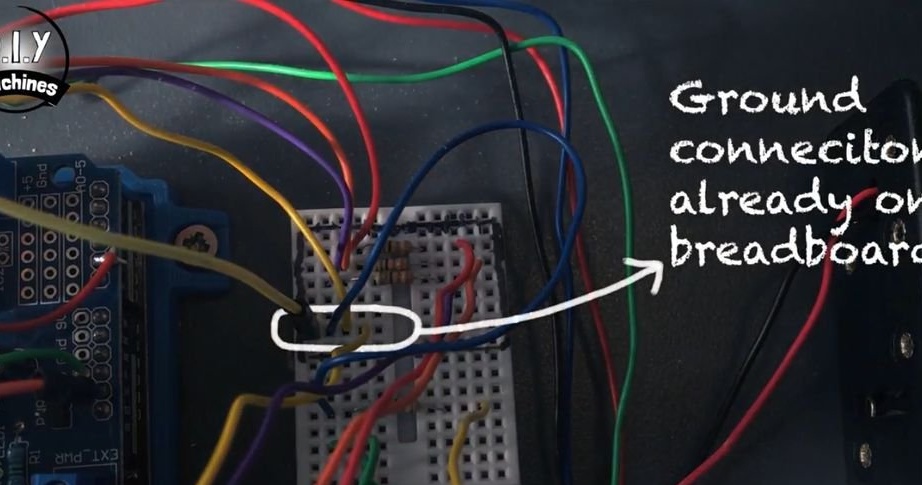
Étape onze: indicateur, remorque, planche à pain
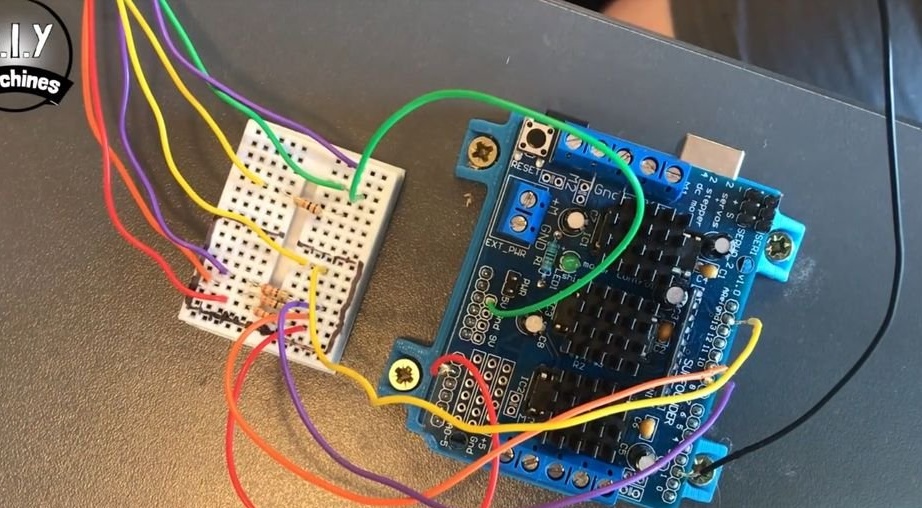
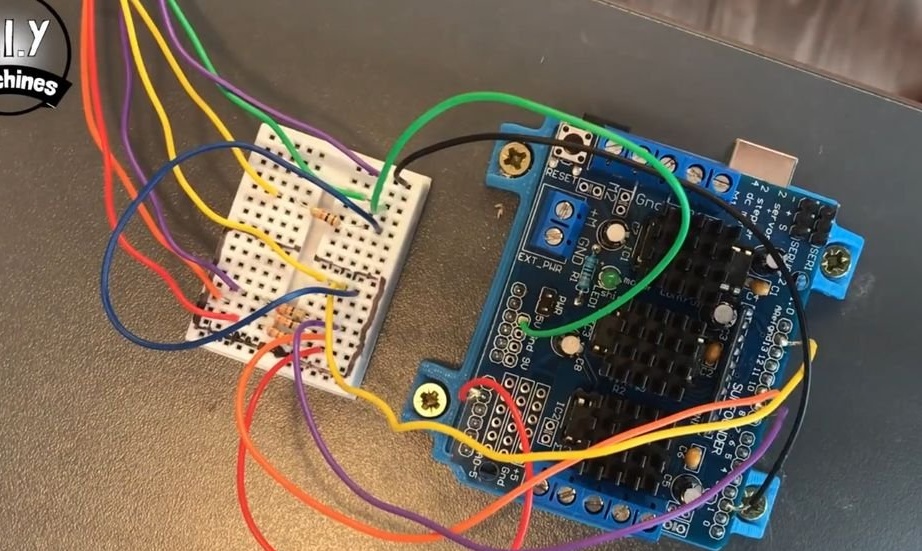
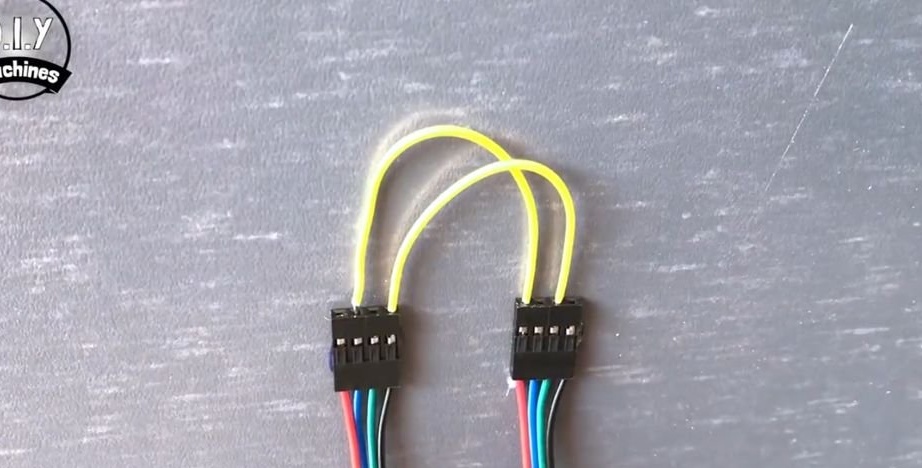
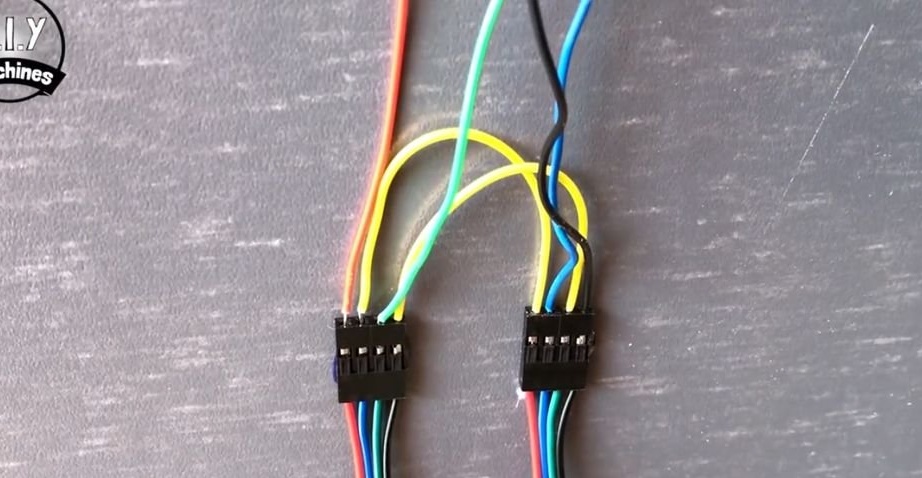
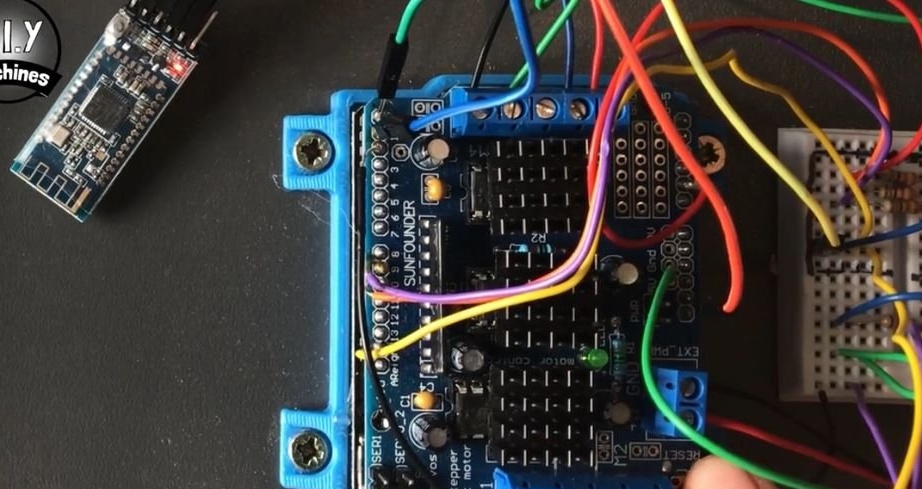
LED RGB, a quatre pattes. Une jambe est commune et trois en couleur. Le maître prend quatre autres fils, chacun d'environ 15 cm de long, et les soudures comme suit (par les couleurs de la lueur LED) au module pilote du moteur:
Rouge à broche D9
Bleu à broche D10
Vert à la broche A1
La cathode à la broche GND.
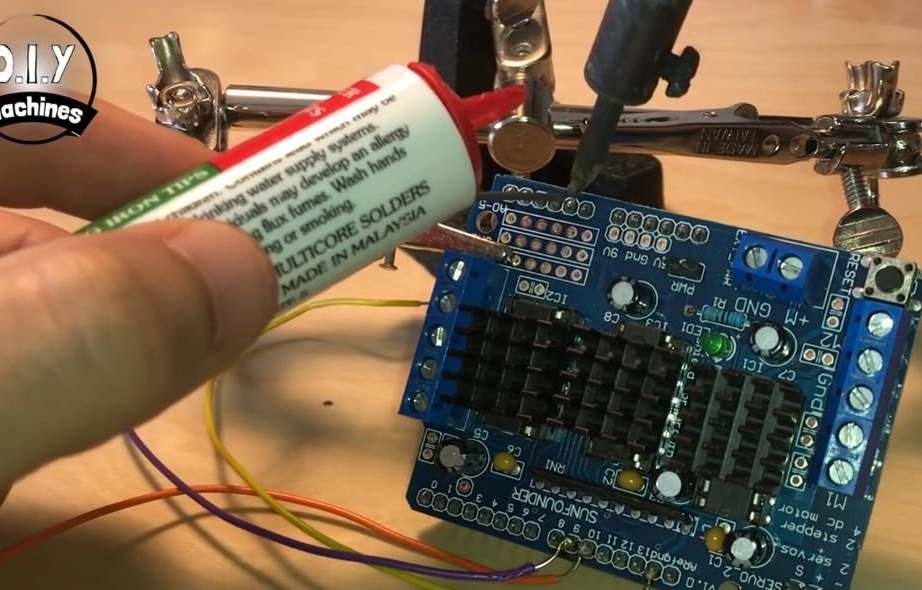
Il relie la remorque: le contact supérieur est GND, le contact central est 5 V, le contact inférieur est la sortie n ° 2.
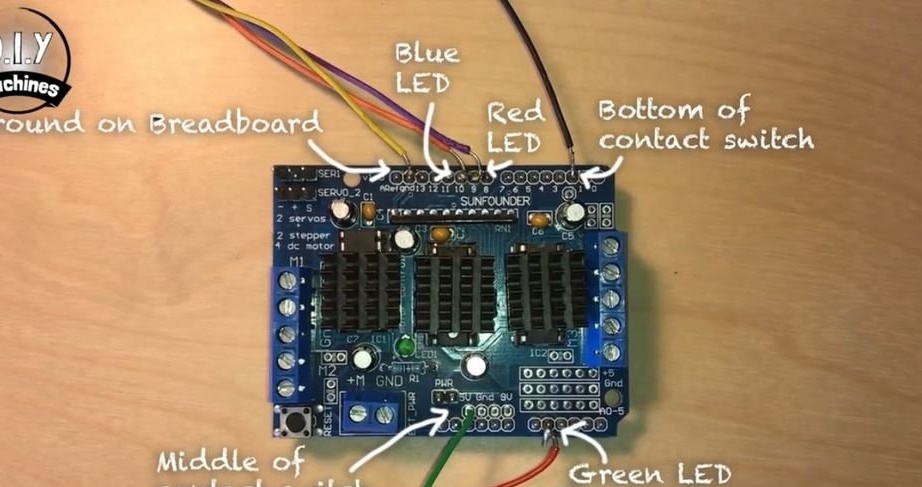
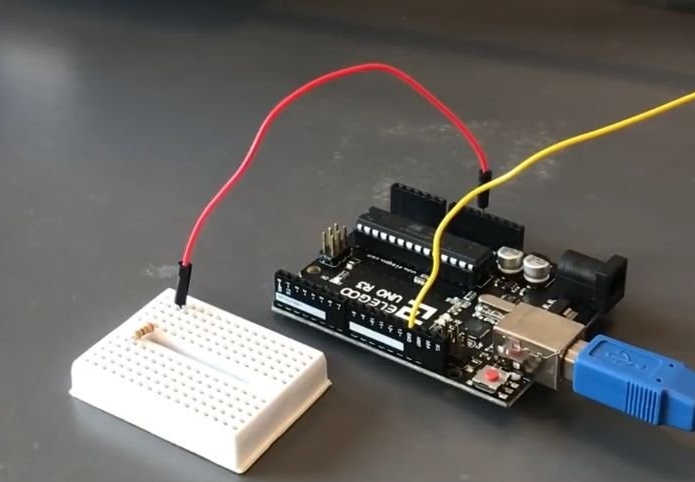
Ensuite, tout monte sur une planche à pain (voir photo). Fixe la planche à la table.
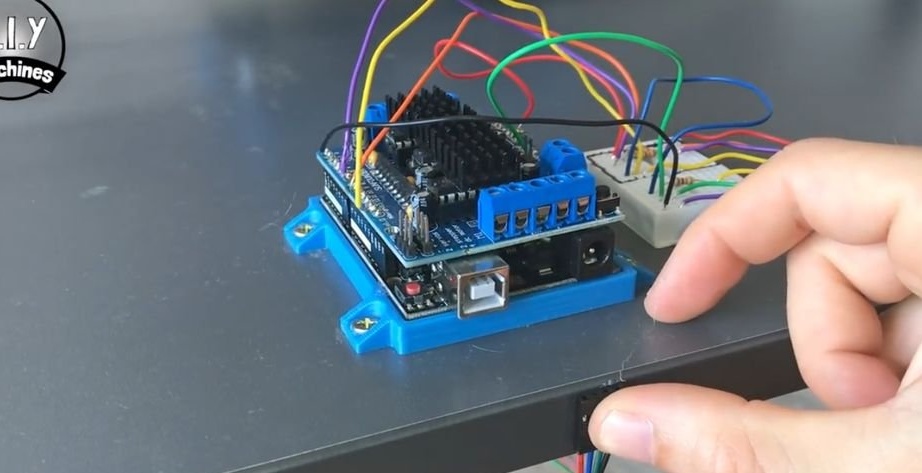
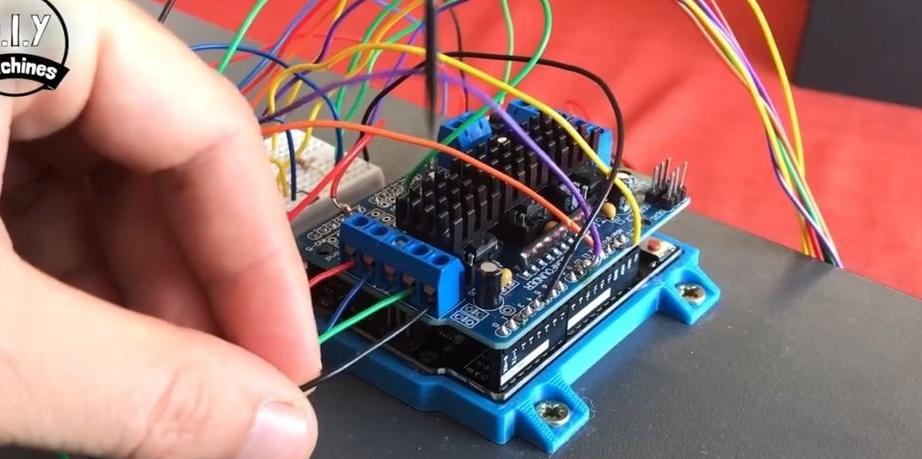
Étape douze: Arduino
Imprime la plaque de montage pour Arduino. Fixe la plaque à la table. Se fixe sur une plaque d'Arduino. Installe un module de pilote de moteur sur l'Arduino.
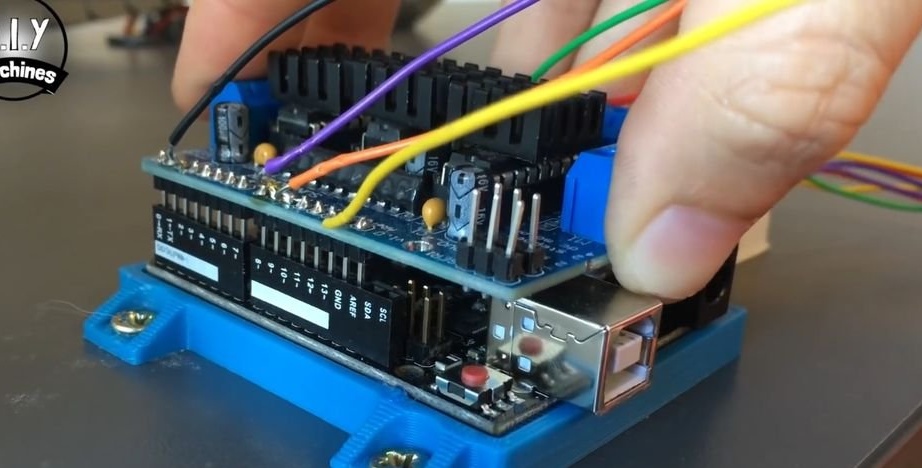
Connecte les fils du pilote à la planche à pain, comme sur la photo.
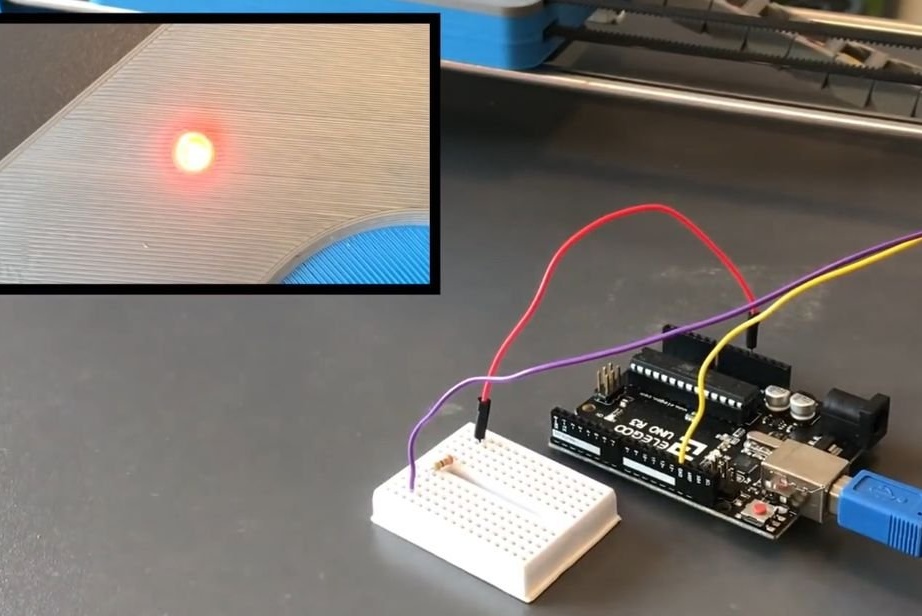
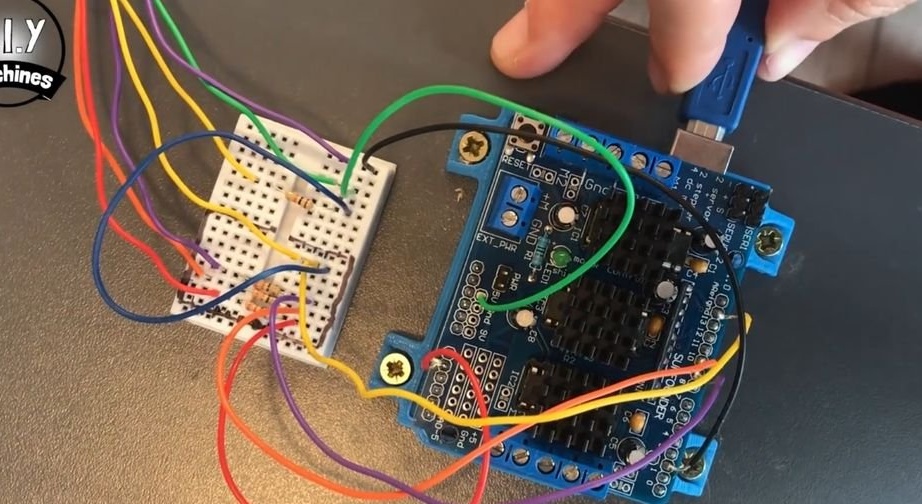
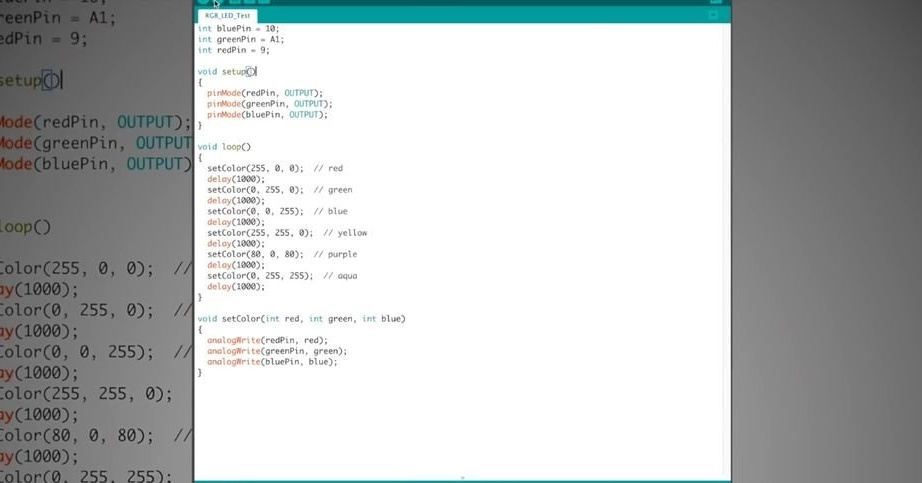
Étape 13: Télécharger le code
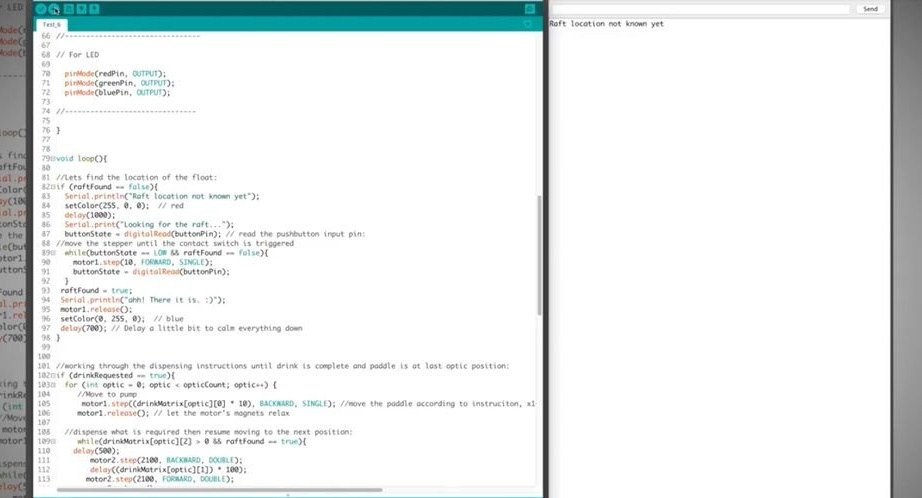
Connecte Arduino à un PC et télécharge le code. Le code peut être trouvé ici.
Exécute le code de test LED. La LED doit s'allumer de différentes couleurs.
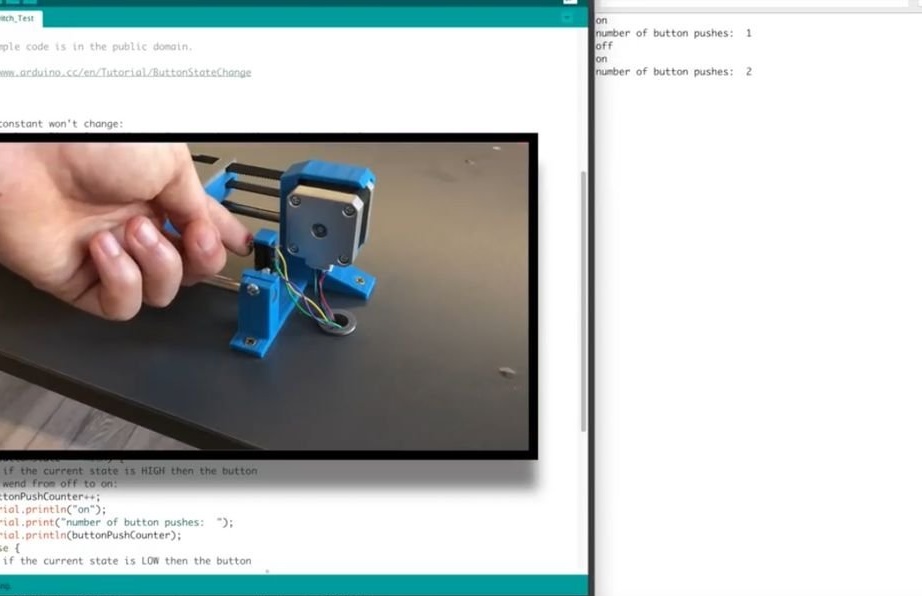
Le script suivant à télécharger est "Contact_switch_test". Dès qu'il est chargé, chaque pression sur le fin de course doit s'afficher sur le moniteur.

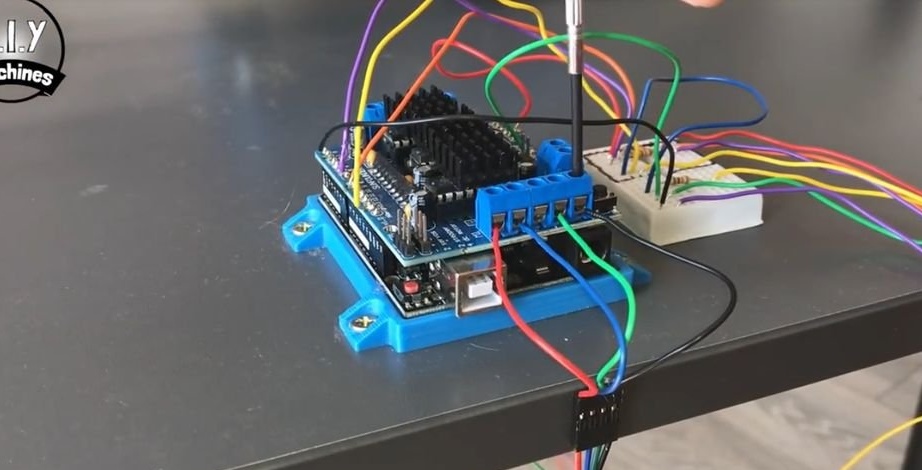
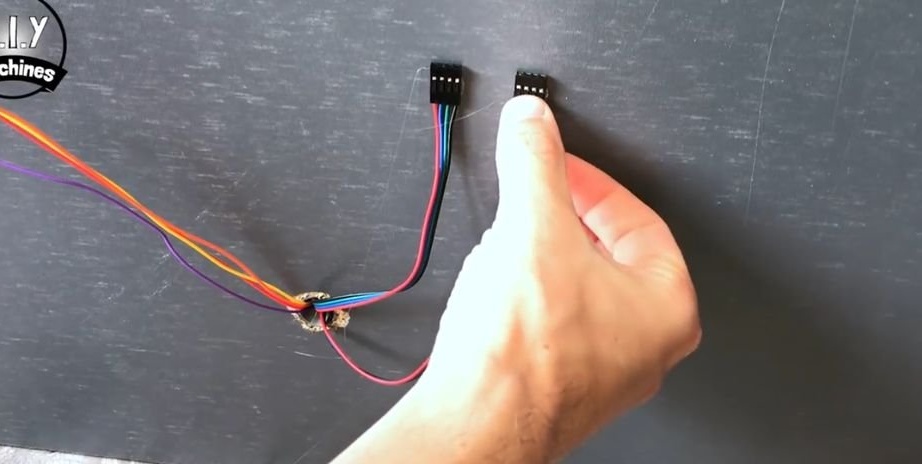
Étape quatorze: connexion des moteurs X et Z
Fixe le connecteur venant du moteur X à travers la planche à pain sur la table. Se connecte avec les fils du conducteur.
Connecte les moteurs pas à pas de l'axe Z.
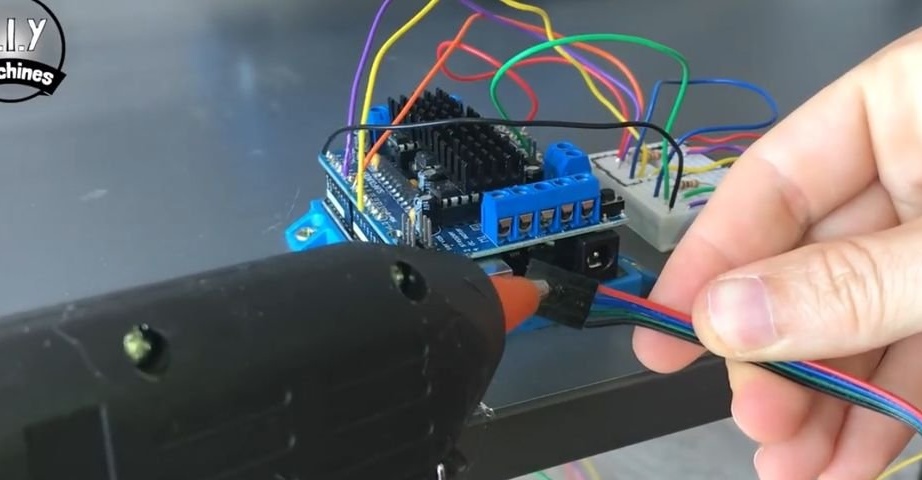
Étape 15: Compartiment à piles
Supprime un cavalier sur un module. Connecte le compartiment à piles.
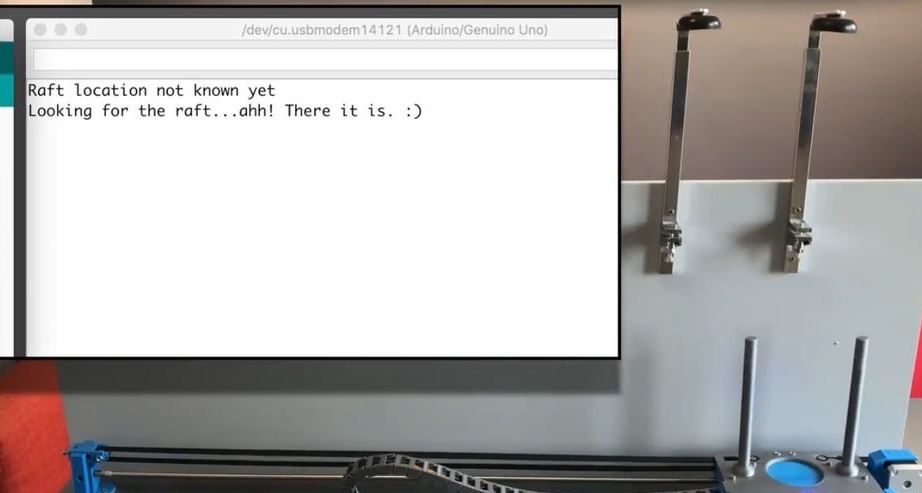
Vous pouvez maintenant exécuter "test 1". La LED rouge doit s'allumer et la plate-forme doit atteindre le fin de course. Ensuite, la LED deviendra verte.
Étape seize: porte-bouteilles
L'utilisation de supports sécurise la paroi arrière du MDF.



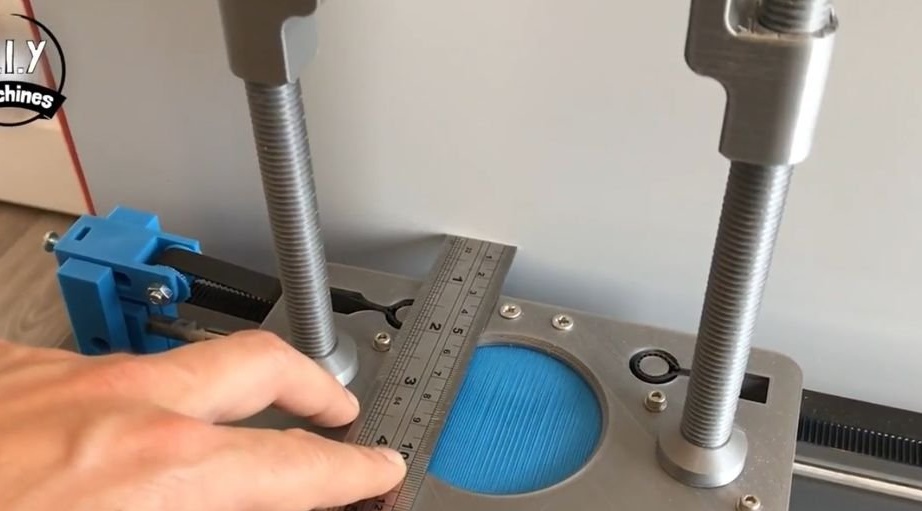

Déplace encore la plate-forme à 1 cm du fin de course. Aligne le support en verre et fixe le support de bouteille avec le distributeur (malheureusement, le maître n'a pas donné de description pour la fabrication ou l'achat du support). Ensuite. les supports sont fixés tous les 12 cm.



Étape dix-sept: code, étalonnage, test
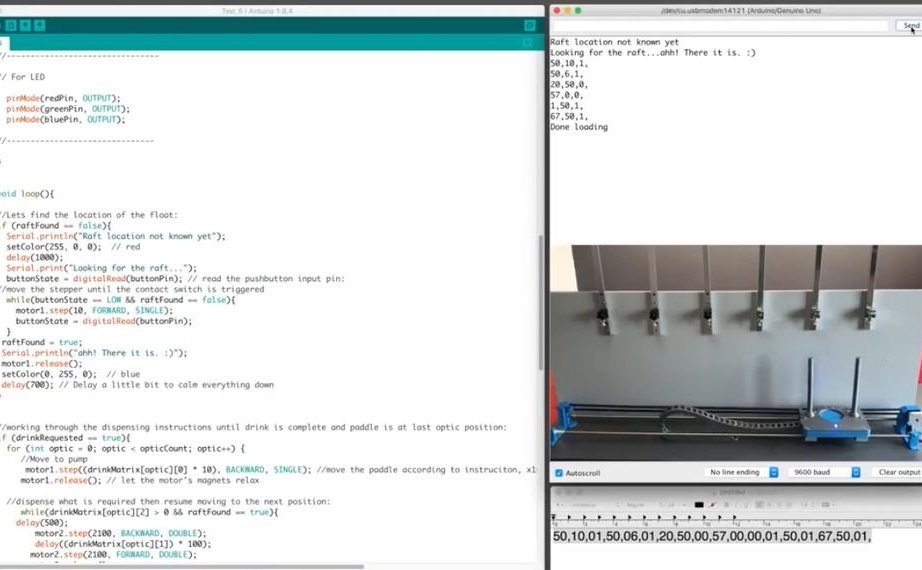
Charge le code principal à https://www.thingiverse.com/thing:2478890
Les valeurs suivantes sont définies dans le réglage: 50,10,01,50,06,01,50,50,00,57,00,00,50,50,02,50,50,00. Le maître a six distributeurs. Dans les réglages, il y a six groupes de trois, où le premier chiffre est la distance de l'interrupteur de fin de course, le premier distributeur, le deuxième distributeur, etc., le deuxième chiffre est le temps où la boisson a été versée dans le verre, le troisième est le nombre de verser. Toutes ces valeurs peuvent être modifiées au besoin.


Le premier verre préparé par l'appareil était le gin et le cola. Pour égaliser la pression dans la bouteille avec du cola, vous devez faire un trou. L'assistant a ensuite défini les paramètres nécessaires.



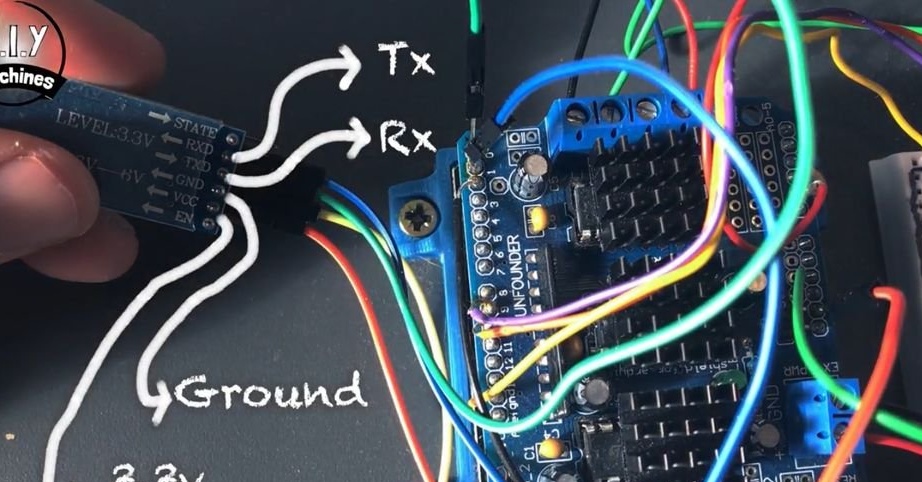
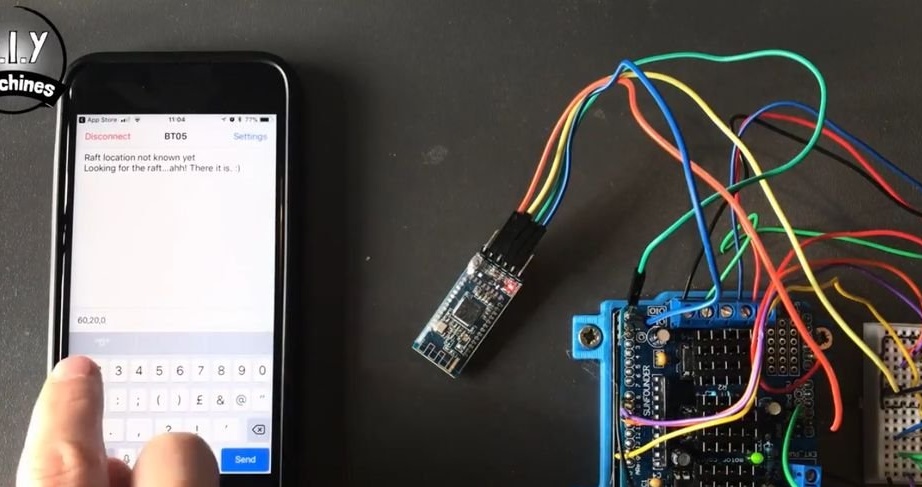
Étape dix-huit: module Bluetooth
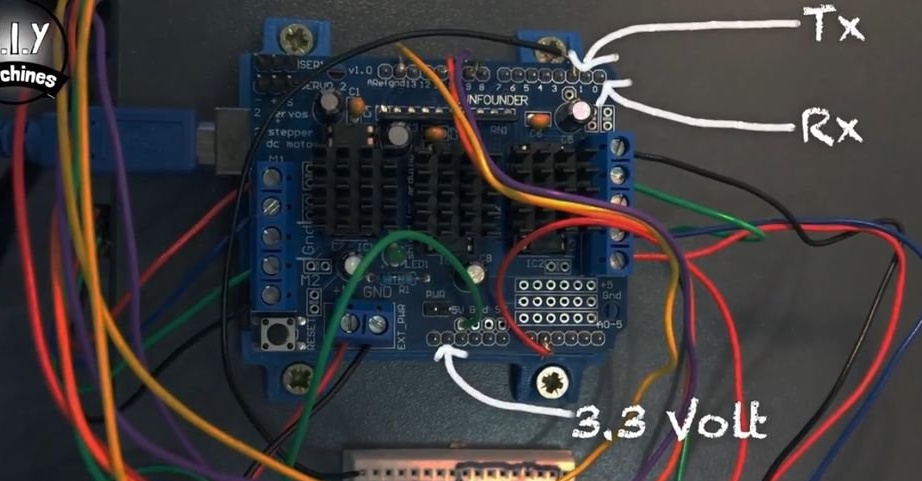
Pour contrôler le barman à partir du gadget, le maître a installé un module Bluetooth. Le module se connecte comme suit.
HM10 -> Bouclier Arduino
RXD ------> TX
TXD -------> RX
GND ------> Terre
VCC ------> 3,3 V

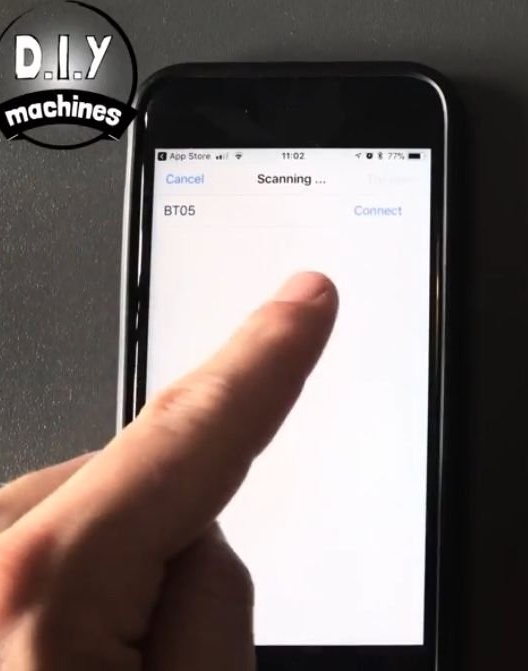
Le maître a un smartphone sous iOS. Pour ce système, il télécharge «hm10 bluetooth serial lite» depuis la boutique d'applications. Il établit ensuite les connexions et saisit les paramètres.

Tout est prêt et pour des informations plus complètes quelques vidéos.