

Cet article traite de la fabrication d'équipements de radiocommande proportionnels sur carte Arduino. Une caractéristique intéressante du projet est que l'équipement a été conçu comme une alternative à l'équipement "adulte", mais que vous pouvez fabriquer vous-même. Il y a des touches de trim sur l'émetteur, ce qui est important pour le contrôle, par exemple modèles avion, l'émetteur est également équipé d'un petit écran avec des LED organiques, qui affiche des informations de base sur le fonctionnement de l'émetteur. L'équipement est conçu pour 6 canaux, 4 proportionnels et 2 discrets. L'auteur a également jeté les bases de l'ajout futur de deux canaux proportionnels supplémentaires, 2 potentiomètres ont été ajoutés au boîtier, mais pour le moment ils ne sont pas impliqués. Néanmoins, cela suffit pour contrôler le modèle d'un avion, d'un navire ou d'une voiture, et des canaux discrets vous permettront de contrôler la charge supplémentaire, par exemple, l'inclusion de phares, de feux de pont, de feux de navigation ou même le lancement de petits missiles. L'équipement a deux modes de contrôle - linéaire et exponentiel.
Pour l'émetteur, vous aurez besoin de:
1 x Arduino NANO / UNO / ProMini
1 x carte de protection BMS pour trois bidons Li-ion
1 x connecteur 5,5 x 2,1 mm
1 x convertisseur élévateur DC / DC XL6009
1 x petit convertisseur abaisseur LM2596 (j'en parlerai séparément)
3 x 18650:
2 x joysticks JH-D202X (vendus sur Ali)
2 x interrupteur à bascule
1 x écran OLED i2c 0,96 pouces 128X64
1 x module radio NRF24l01 avec amplificateur et antenne
9 x bouton tactile 6 * 6 * 5 mm
Résistances de sortie (voir schéma)
Pour le récepteur, vous aurez besoin de:
1 x Arduino NANO / UNO / Pro Mini
1 x module radio NRF24l01
1 x régulateur de tension AMS1117 3,3 V
30 x peignes pls
1 x planche à pain
1 x 10 uF condensateur
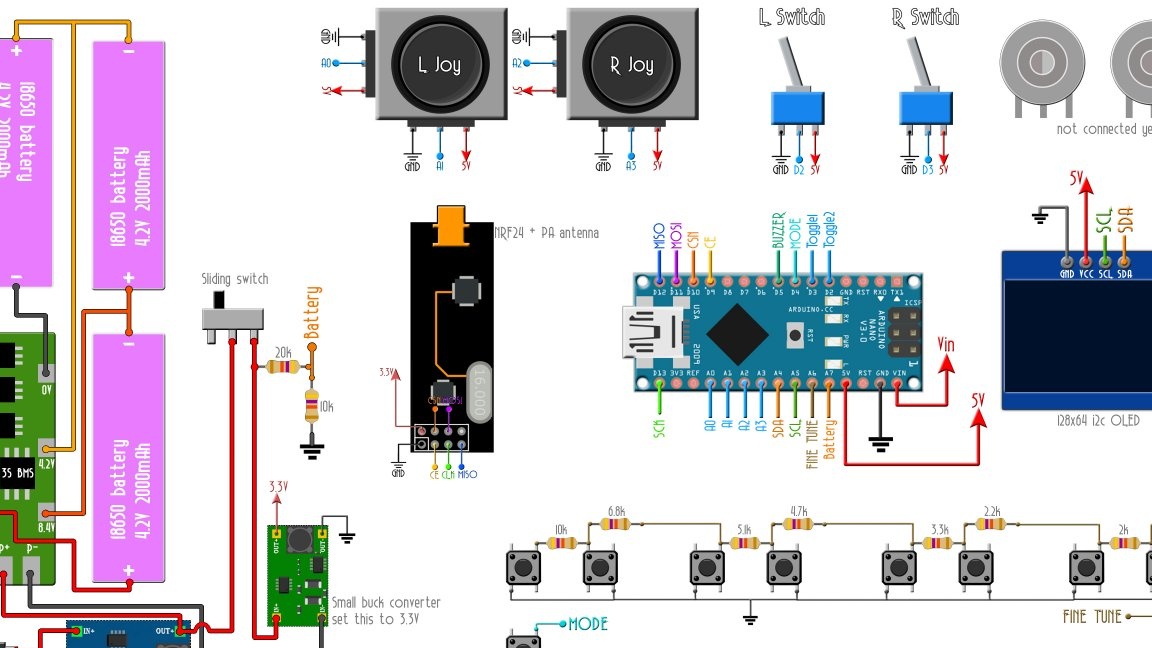
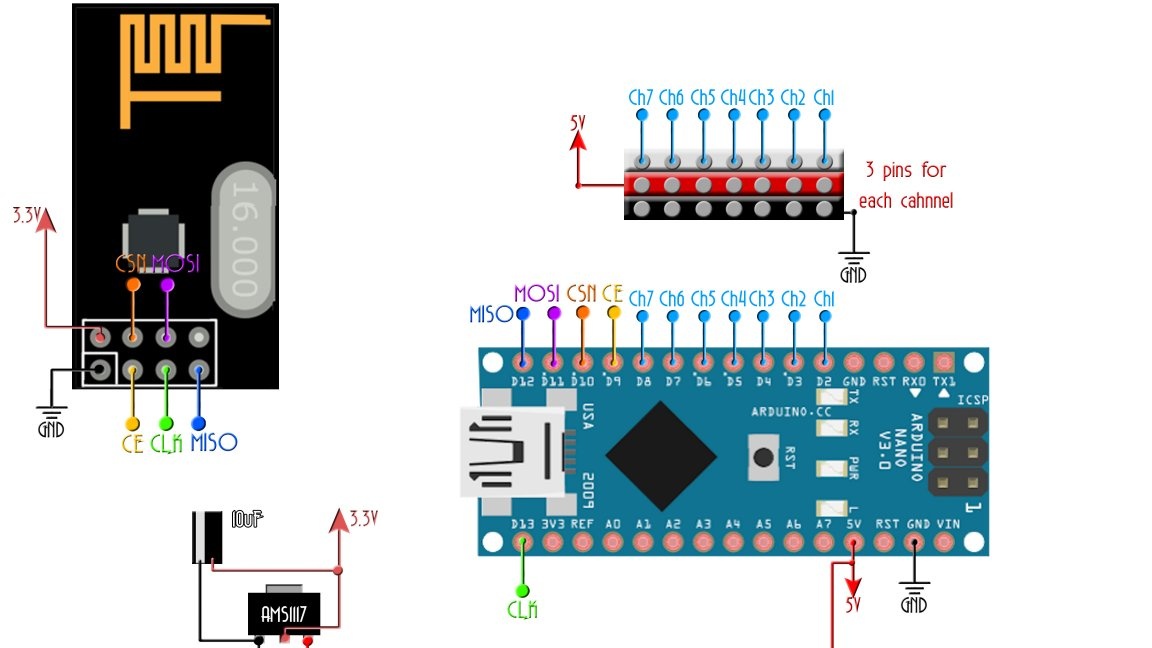
Ci-dessous, vous pouvez voir une image graphique de tous les composants et un schéma de leur connexion. Avant l'assemblage, les convertisseurs abaisseur doivent être configurés, XL6009 à 12,6 V (ce module est responsable de la charge), LM2596 à 3,3 V (alimentation du module radio). Au lieu de LM2596, il est théoriquement possible d'utiliser ASM117, selon la fiche technique, la tension d'entrée maximale de ce stabilisateur est de 15 V, mais il est conseillé de ne pas l'appliquer au-dessus de 12 V. Apparemment, sur la base de ces considérations, l'auteur a utilisé un autre convertisseur DC / DC. Au lieu de cela, vous pouvez également utiliser un stabilisateur réglable, par exemple LM317.
Logement
Le boîtier se compose de deux parties principales: la partie supérieure et inférieure. De plus, 9 boutons (8 pour le recadrage et un bouton de mode), 5 sauvegardes pour les boutons, un cadre de l'écran et un curseur d'alimentation sont imprimés.L'auteur a imprimé un PLA avec une gomme avec une couverture de 20%, une buse de 0,4 mm et une hauteur de couche de 0,3 mm. Soit dit en passant, personne n'interdit d'utiliser un autre étui, vous pouvez simplement prendre une boîte appropriée, la coller vous-même ou prendre un étui assez grand d'un jouet chinois, ils sont presque vendus dans des sacs sur des sites classés.
Montage de l'émetteur
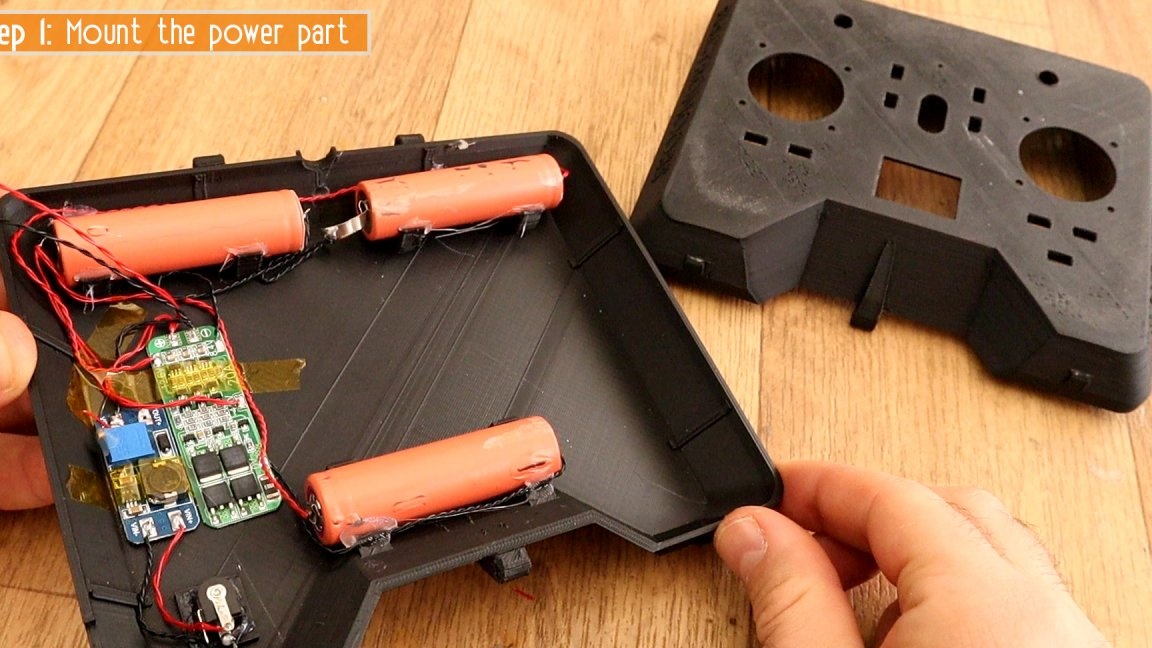
Les batteries sont connectées en série. L'auteur a fait cela avec la soudure, je tiens à noter que les boîtes à souder de 18650 nécessitent certaines compétences, donc si vous n'avez pas une telle expérience, achetez des batteries avec des pétales déjà soudés et soudez-les. De plus, les batteries selon le schéma ci-dessus sont soudées au module BMS, dont l'entrée est alimentée en tension par le convertisseur XL6009 (MT3608 peut être utilisé à la place). Le BMS est chargé de charger / décharger uniformément toutes les canettes et de couper l'alimentation lorsque les batteries sont épuisées. La tension peut également être surveillée à l'aide de l'écran. Les batteries sont chargées par une alimentation 9 V avec un courant ne dépassant pas 3 A (maximum pour XL6009). En effet, le courant de charge doit être calculé en fonction de la capacité des batteries et prendre l'alimentation avec un courant légèrement inférieur ou le limiter. Il est pratique de monter les modules dans le boîtier à l'aide de ruban adhésif double face "automobile".
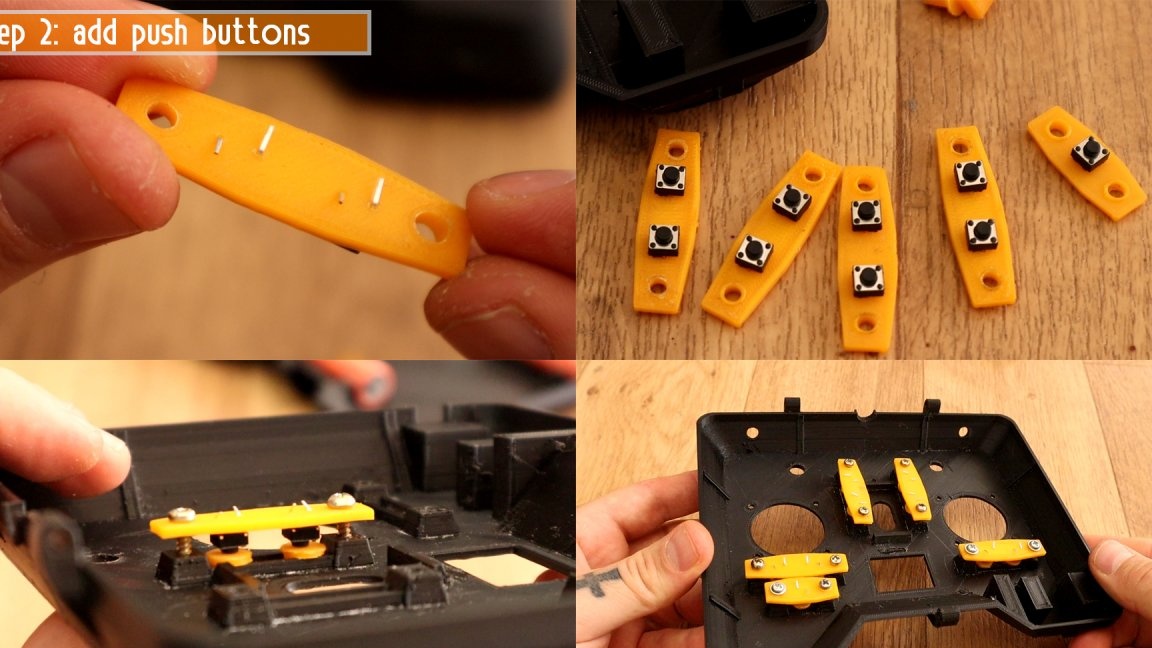
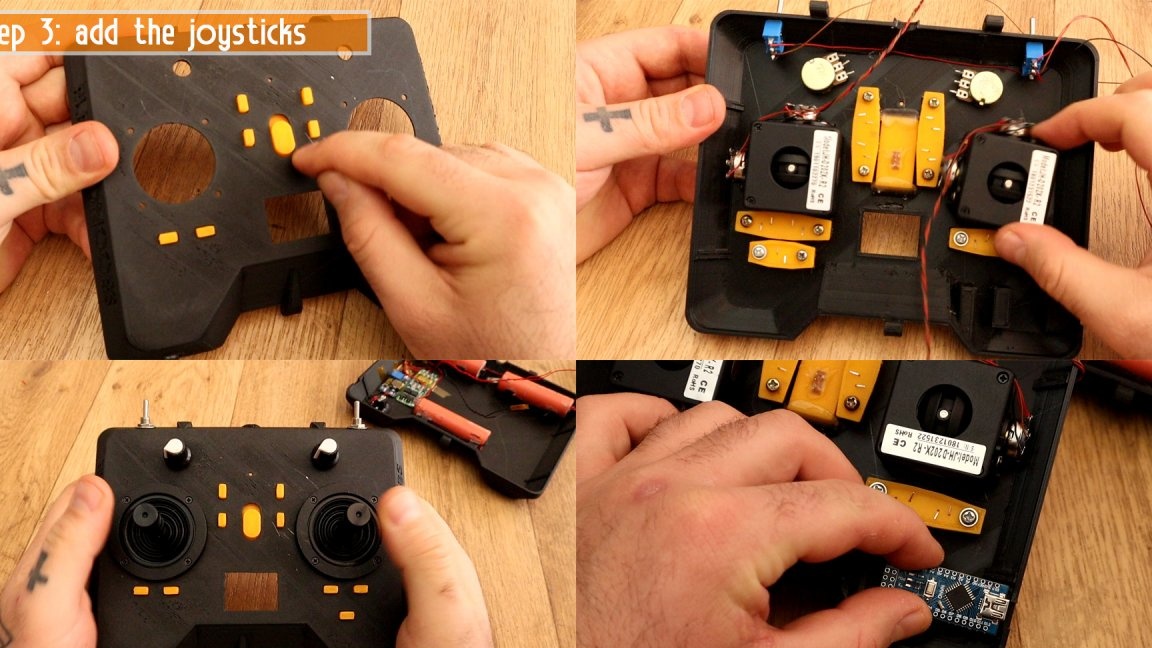
Les boutons de l'horloge sont installés sur des plates-formes spéciales, après quoi ils sont fixés avec de petites vis aux supports correspondants à l'intérieur du boîtier. Ici, en fait, tout est au niveau du designer et est bien compris de la photo.
Les boutons sont interconnectés par des résistances, laissant ainsi essentiellement un petit clavier résistif, ce qui vous permet d'utiliser une seule broche de la carte Arduino. Les fils sont soudés aux potentiomètres du joystick, les fils extrêmes vont à la masse et 5 V, les fils moyens à la broche Arduino correspondante. J'ai l'intention de répéter ce schéma, j'ai déjà expérimenté un peu et je peux dire que le code a pour fonction d'inverser automatiquement les canaux selon les besoins, mais je n'ai pas encore compris comment le schéma détermine ce besoin. C'est-à-dire que l'inversion de canal s'effectue essentiellement en soudant les conclusions extrêmes par endroits. De tels joysticks, au moment de la rédaction du présent document, sont vendus à Ali au prix d'environ 7 $ chacun, que cela dépend de vous ou non. Au lieu de cela, vous pouvez utiliser les modules de joystick pour Arduino ou les joysticks des contrôleurs de jeu.
En fait, le joystick fonctionne comme un diviseur, déviant la poignée, nous changeons la tension à la sortie médiane du potentiomètre, et en fonction de cette tension, l'arduino détermine l'écart.
[centre] [/ centre]
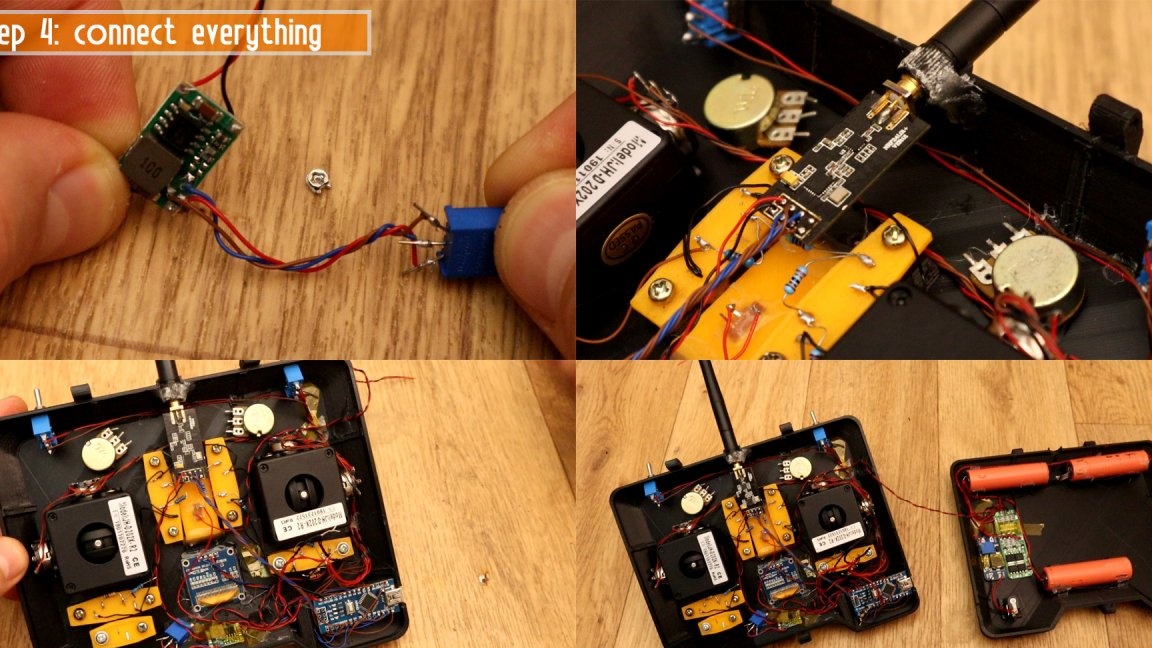
Les gobelets sont également connectés. Des interrupteurs à bascule sont nécessaires on-off, car le canal est discret et n'a que deux valeurs - 0 ou 1, selon que la sortie de l'arduino est attirée vers le sol ou vers une alimentation 5 V. De plus, l'interrupteur on-off est nécessaire, si vous laissez la sortie "suspendue en l'air", ce qui se passerait lors de l'utilisation de trois positions, le contrôleur ne comprend pas ce qui se passe et la valeur saute au hasard soit 0 soit 1 (selon mon expérience). Vous ne pouvez pas définir de potentiomètres supplémentaires, pour le moment ils ne sont pas impliqués. Ou vous pouvez mettre et surveiller la page source, peut-être que l'auteur publiera éventuellement le firmware mis à jour.
En fait, le joystick fonctionne comme un diviseur, déviant la poignée, nous changeons la tension à la sortie médiane du potentiomètre, et en fonction de cette tension, l'arduino détermine l'écart.
[centre] [/ centre]
Les gobelets sont également connectés. Des interrupteurs à bascule sont nécessaires on-off, car le canal est discret et n'a que deux valeurs - 0 ou 1, selon que la sortie de l'arduino est attirée vers le sol ou vers une alimentation 5 V. De plus, l'interrupteur on-off est nécessaire, si vous laissez la sortie "suspendue en l'air", ce qui se passerait lors de l'utilisation de trois positions, le contrôleur ne comprend pas ce qui se passe et la valeur saute au hasard soit 0 soit 1 (selon mon expérience). Vous ne pouvez pas définir de potentiomètres supplémentaires, pour le moment ils ne sont pas impliqués. Ou vous pouvez mettre et surveiller la page source, peut-être que l'auteur publiera éventuellement le firmware mis à jour.
Ensuite, un Arduino, un module radio et une carte d'alimentation de module radio sont installés. Comme décrit ci-dessus, il est nécessaire de régler une tension de 3,3 volts sur celui-ci. Il est presque impossible de le faire en utilisant une résistance variable standard, donc l'auteur l'a dessoudée et soudé un trimmer multi-tours à la place. Ensuite, l'écran est monté et tous les composants sont connectés aux bornes Arduino conformément au schéma.
Firmware
Le micrologiciel Arduino a déjà été évoqué 1000 fois, à ce stade, la capacité de le faire tout en conservant un projet Arduino est tout aussi importante par défaut que la capacité de tenir un fer à souder entre vos mains tout en tenant quelque chose à souder.Le code de l'émetteur, du récepteur, des bibliothèques nécessaires et un fichier pour l'impression 3D du boîtier peuvent être téléchargés dans une archive à la fin de l'article.
Récepteur
Pour le récepteur, vous aurez besoin d'une autre carte Arduino, d'un module radio (sans antenne, la télémétrie n'est toujours pas implémentée ici) et d'un stabilisateur de 3,3 volts. Le récepteur est soudé à la planche à pain. La puissance du récepteur est effectuée de la même manière que la puissance de tout autre récepteur d'usine, à partir d'une sortie spéciale du régulateur de vitesse.

Pour ma part, je veux ajouter qu'au lieu de l'antenne standard de ce module, il est souhaitable de souder la même antenne qui est installée dans le module avec un amplificateur (uniquement sans boîtier). Cela n'affectera pas particulièrement la portée de réception, mais affectera considérablement la qualité de réception en fonction de la position du modèle contrôlé dans différents plans. Pour les récepteurs et émetteurs modernes, à cet effet, même deux antennes sont installées, qui sont situées perpendiculairement l'une à l'autre.
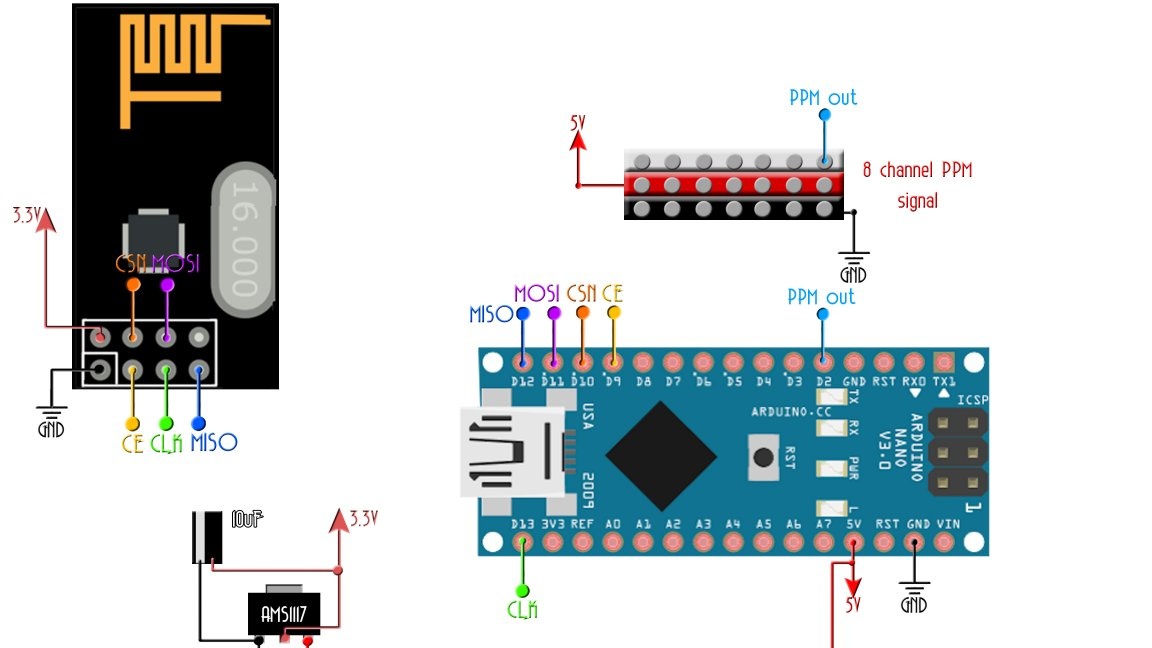
De plus, l'auteur a mis en œuvre une fonction très importante - la sortie du signal du récepteur PPM. Schématiquement, rien ne change dans ce cas, il vous suffit de remplir un autre firmware, le signal PPM est émis de la même manière que dans la plupart des récepteurs d'usine - à partir du premier canal (gaz).
C’est tout. Personnellement, j'ai vraiment aimé le projet, et comme je l'ai déjà dit, je prévois de le répéter dans le cas de la télécommande d'un jouet pour enfant. Dans le menu, vous pouvez sélectionner le mode de linéaire à exponentiel et affiner la valeur de chaque stick. Gardez à l'esprit que la valeur moyenne de chaque canal doit être de 127.
Vous pouvez télécharger tout ce dont vous avez besoin ici.
Tous les succès dans le travail!