Le capitaine s'intéresse depuis longtemps aux modèles d'avion. C'était d'abord une maquette d'avion, puis des quadrocoptères. Dans cet article, l'assistant vous dira quels matériaux choisir pour un quadricoptère, ainsi que la façon de fabriquer un cadre en contreplaqué. Regardons une courte vidéo de démonstration.
Pour fabriquer un quadricoptère, le capitaine a utilisé ce qui suit
Outils et matériaux:
- Contreplaqué de bouleau;
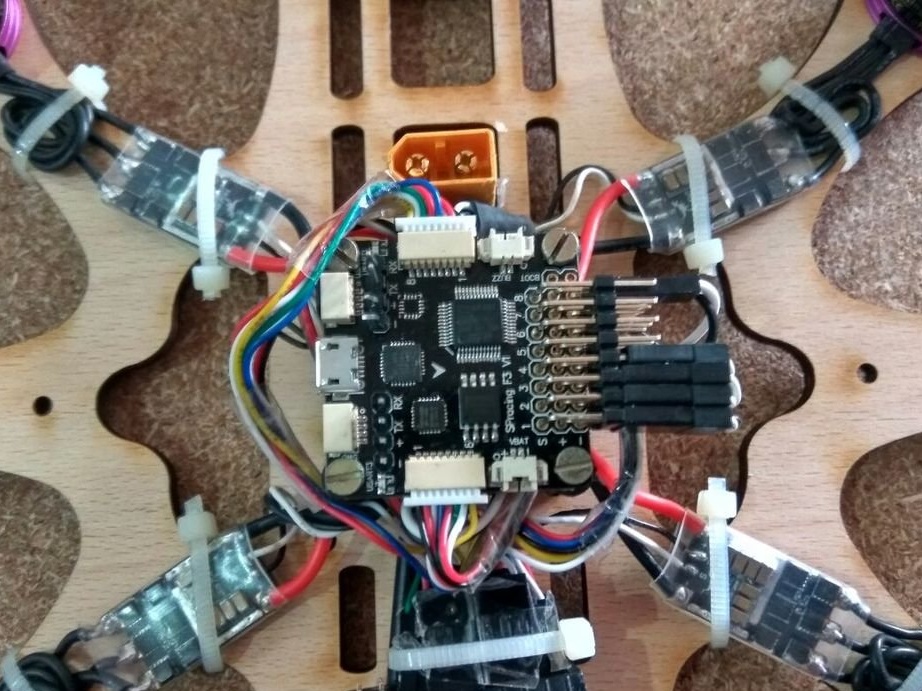
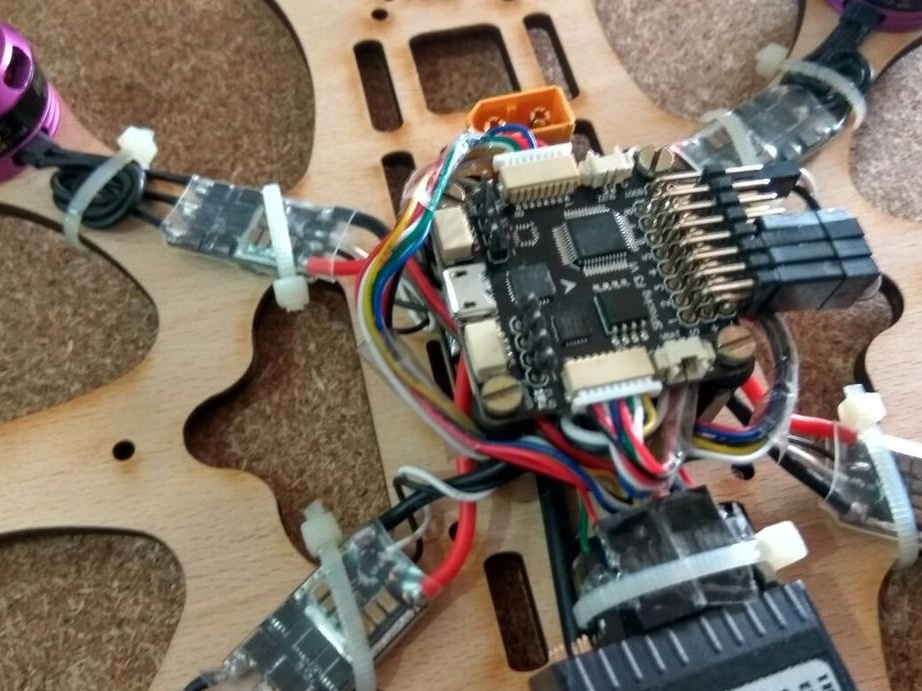
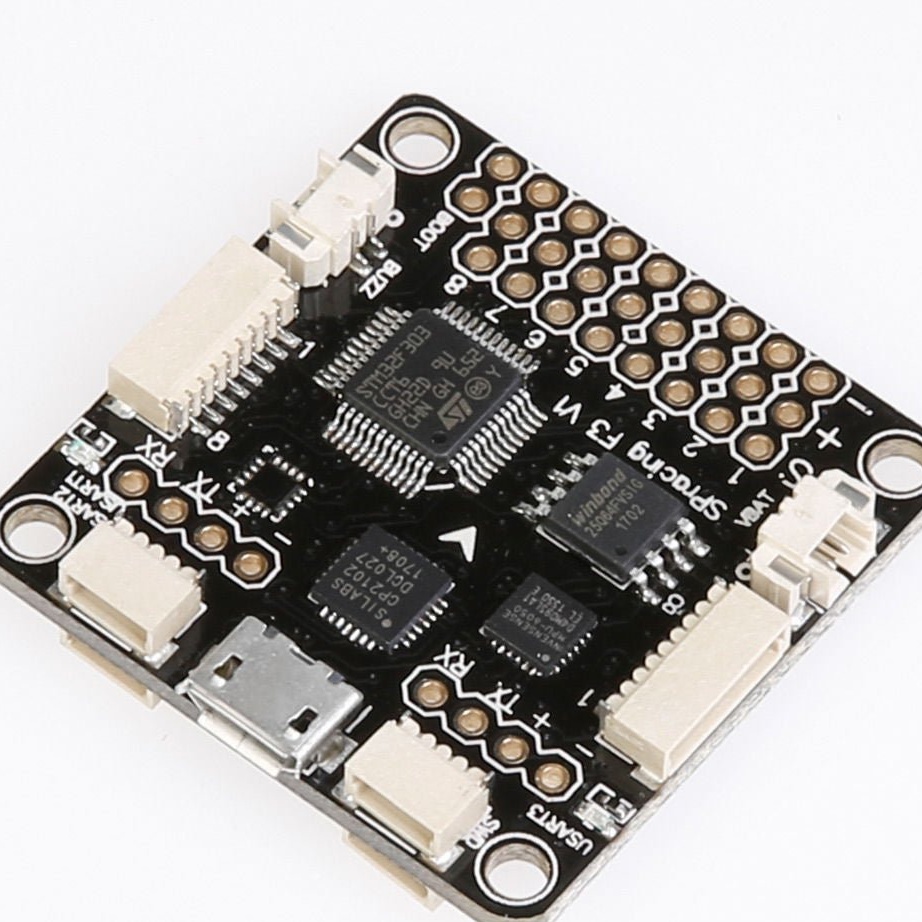
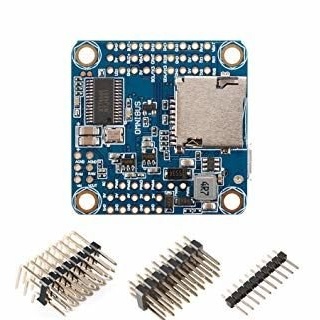
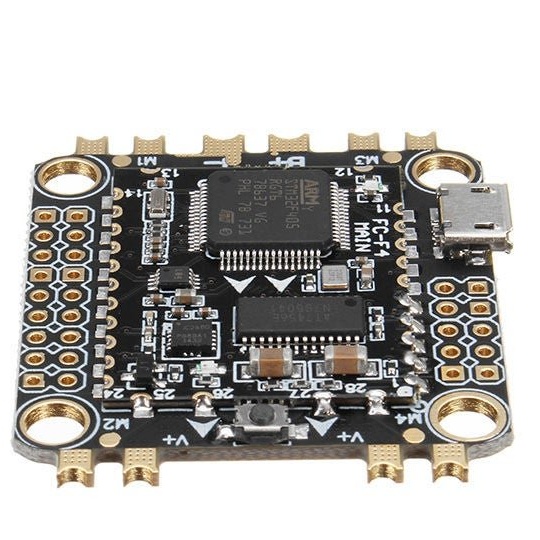
- Contrôleur Omnibus F4, SP Racing F3;
-Carte de distribution d'alimentation Mateck;
- Contrôleur HGLRC 28A BLHeli ESC - 4 pièces;
- Moteur Racestar BR2204 2600Kv Racing Edition -4 pièces;
- Hélices KingKong 5X4X3 - 4 pièces;
- Module radio Flsky TH9X avec récepteur;
Batterie Gens 3800 mAh;
-Racks; - 16 pièces;
-Vis M3;
- tournevis;
-Accessoires de soudure;
-Knife;
- Coupe CNC;
Première étape: sélection des matériaux
Cadre.
Habituellement, le cadre est composé de composants légers et rigides, tels que la fibre de verre, la fibre de carbone, le bois, l'aluminium, etc. Il existe de nombreux types de cadres, le maître fabriquera un cadre pour quatre moteurs.
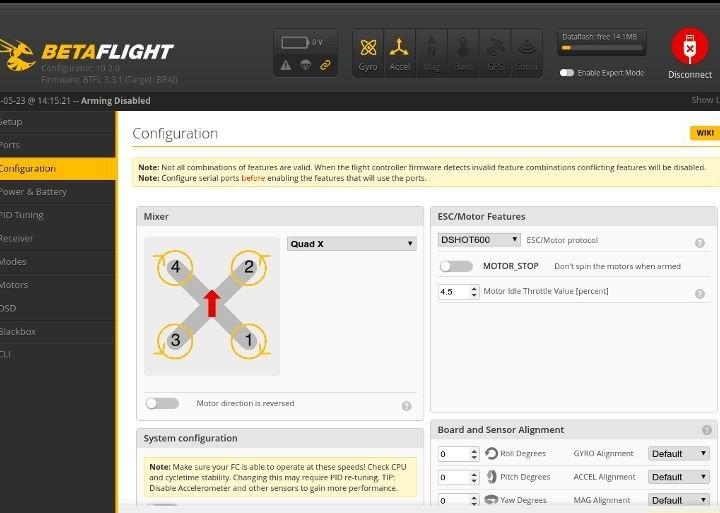
Ces cadres sont principalement sous forme H ou X. La forme en X est un bon équilibre entre stabilité et maniabilité. C'est ce cadre que fera le maître.
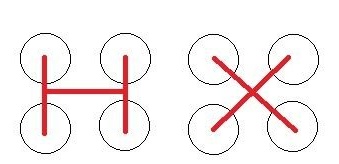

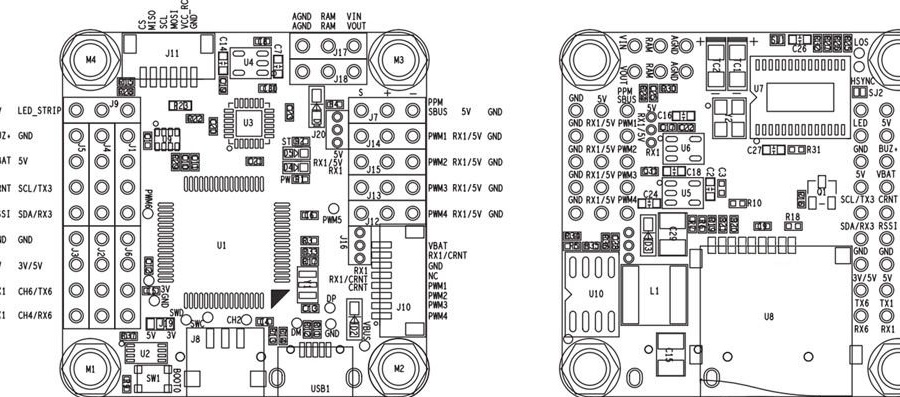
Contrôleur
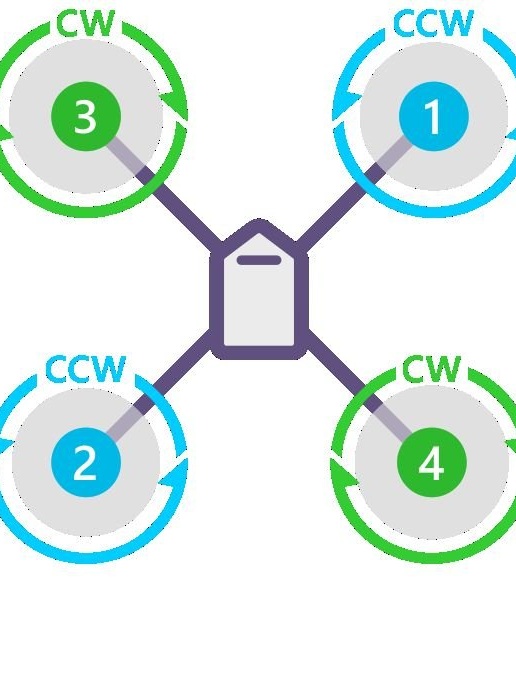
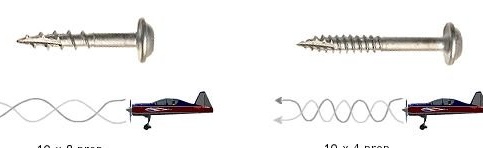
Le contrôleur contrôle le fonctionnement des moteurs. Le diagramme montre que tous les moteurs tournent dans des directions opposées pour neutraliser le couple généré par chaque moteur. Le contrôleur est le cerveau d'un quadricoptère, c'est essentiellement un petit ordinateur qui utilise ses capteurs pour mesurer constamment l'angle et la vitesse.
Les contrôleurs de vol sont principalement classés selon les spécifications du processeur.

Les moteurs
Il existe deux types de moteurs, les moteurs sans balais et les moteurs sans balais. La plupart des quadrocoptères utilisent des moteurs sans balais qui peuvent répondre très rapidement aux changements de vitesse et de couple. Pour moteurs sans balais, spécial électronique contrôleur de vitesse (ESC).
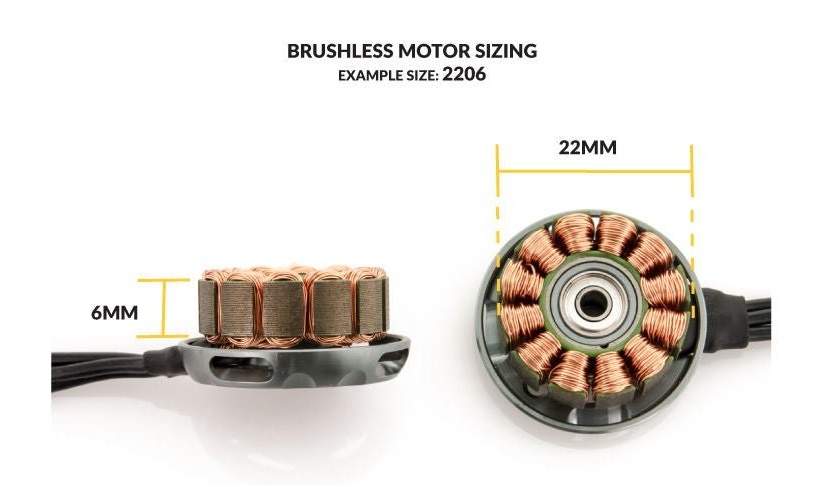
La taille des moteurs sans balais est indiquée par un nombre à 4 chiffres - AABB. «AA» est la largeur du stator et «BB» est la hauteur ou le diamètre du stator, tous deux en mm (millimètres). Par exemple, le Racestar BR2205 a un stator d'un diamètre d'environ 22 mm et d'une hauteur d'environ 05 mm.
En fait, plus le stator est élevé, plus la puissance est élevée à des vitesses plus élevées, et plus le stator est large, plus le couple est élevé à des vitesses plus faibles.
La valeur KV du moteur indique la vitesse à laquelle le moteur tournera lorsque vous appliquez 1 volt à ses enroulements.Elle est déterminée par le nombre d'enroulements du fil de cuivre dans le stator du moteur et la force magnétique des aimants.
Moins de bobinages signifient moins de résistance et donc un régime plus élevé. C'est pourquoi les moteurs avec un KV plus élevé ont tendance à avoir moins d'enroulement du stator.
KV détermine quelle vis vous pouvez utiliser avec le moteur. Plus le KV est bas, plus la vis peut tourner, et vice versa. Il n'est pas possible d'augmenter la force de levage en installant une vis plus grande sur le moteur avec un KV plus élevé, car les exigences de couple dépasseront la puissance admissible et le moteur surchauffera.
Par exemple: les moteurs BR2205 2600 kV peuvent fonctionner avec des vis 5x4 pouces et les moteurs BR2212 1000 kV peuvent fonctionner avec des vis 10x4,5 pouces
Le KV n'est en aucun cas un indicateur de la puissance du moteur; les moteurs avec un KV plus élevé ne sont pas nécessairement plus puissants que les moteurs avec un KV inférieur.


Régulateurs électroniques de vitesse (ESC).
Des avancées récentes dans le domaine des mini quadrocoptères sont devenues possibles grâce à l'apparition de petits régulateurs électroniques de vitesse qui permettent le fonctionnement de moteurs sans balais. Le fonctionnement des contrôleurs électroniques de vitesse consiste à recevoir le signal d'accélération du contrôleur de vol et à maintenir la rotation du moteur à la vitesse requise.
Un certain nombre de technologies fonctionnent à l'intérieur de ces petits appareils qui dépassent le cadre de ce manuel. Lors de l'achat, choisissez un ESC avec un courant continu nominal d'au moins 20% supérieur à celui calculé.


Hélices.
Les hélices convertissent l'énergie mécanique des moteurs en traction. La taille et la forme de l'hélice jouent un rôle énorme dans l'efficacité du vol.
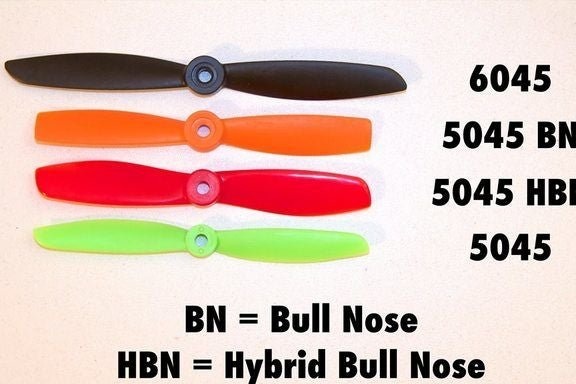
Les fabricants utilisent 2 types de formats: L x P x B | LLPP x B. Où, L est la longueur, P est le pas, B est le nombre de pales.
Les hélices peuvent être faites de divers matériaux, tels que le composite plastique, la fibre de carbone, le bois, etc. Chaque type de matériau a des caractéristiques uniques, par exemple, la fibre de carbone et le bois sont vraiment rigides et connus pour leur bon fonctionnement, et certains plastiques sont extrêmement durables. La plupart des vis utilisées dans les mini quadrocoptères sont en composites plastiques.
La taille de l'hélice que vous pouvez utiliser est limitée par la taille de votre cadre, ainsi que par la puissance HF de votre moteur. En règle générale, plus vous pouvez utiliser d'hélice pour créer une certaine poussée, plus elle sera efficace. Pour les mini quadrocoptères, ils varient entre des vis de 5 à 6 pouces par incréments de 4 à 5 pouces.
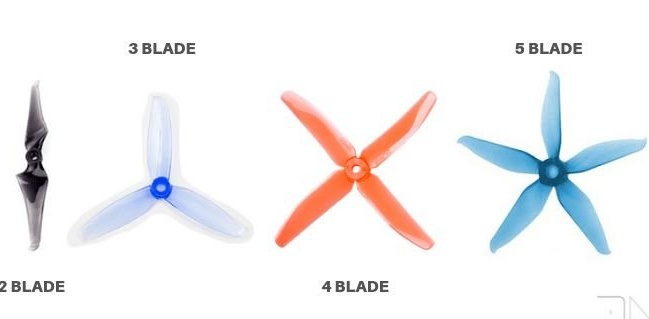
Le nombre de pales affecte la traction et la consommation d'énergie. Plus il y a de pales, plus il y a de traction et plus d'énergie est gaspillée.

Les piles
Actuellement, la plupart des drones utilisent des batteries au lithium polymère, communément appelées batteries Lipo. La batterie avec l'ESC et le moteur est un système d'alimentation quadricoptère.
Ne considérez pas la batterie comme un réservoir d'énergie, les moteurs peuvent tirer une quantité monstrueuse d'ampères à des intervalles très courts. Les batteries LiPo sont un ensemble de cellules dont chacune a une tension nominale de 3,7 V. Si une tension plus élevée est requise, ces cellules peuvent être connectées en série pour former une batterie. Les batteries connectées en série sont marquées de la lettre «S» et en parallèle de la lettre «P».
Plus il y a de cellules connectées en série, plus la tension est élevée et plus il y a de cellules en parallèle, plus la capacité est élevée.
Par exemple:
1S = 1 cellule = 3,7 V
2S = 2 cellules = 7,4 V
3S = 3 cellules = 11,1 V
4S = 4 cellules = 14,8 V
5S = 5 cellules = 18,5 V
6S = 6 cellules = 22,2 V
La capacité est indiquée en milliampères ou «mAh». Il s'agit du nombre d'ampères qu'une batterie peut fournir en une heure. Par exemple, une batterie 3S 2000 mAh peut fournir 2 A pendant 1 heure. donc si votre quadcopter tire 20A, alors son vol continuera pendant 2/20 * 60min = 6 minutes.
La décharge nominale indique la vitesse maximale à laquelle vous pouvez tirer du courant de la batterie. Il est indiqué par le numéro "C" en haut. Plus la cote C est élevée, plus la quantité de courant que la batterie peut fournir est élevée.
Par exemple, une batterie 2000 mAh 25C peut fournir jusqu'à 2000x25 = 50 000 mA ou 50 A.



Deuxième étape: conception et assemblage du cadre
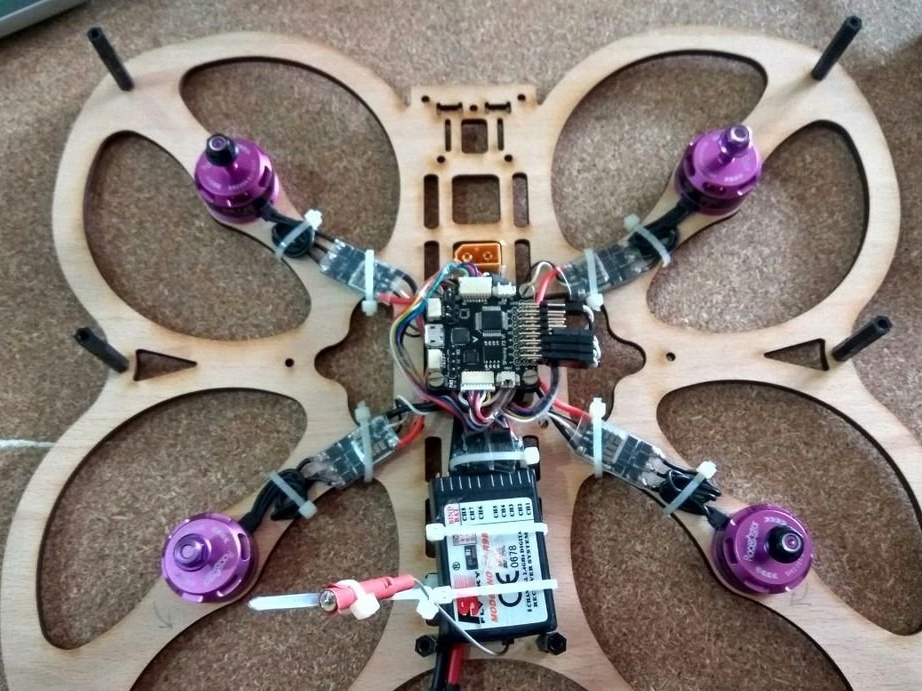
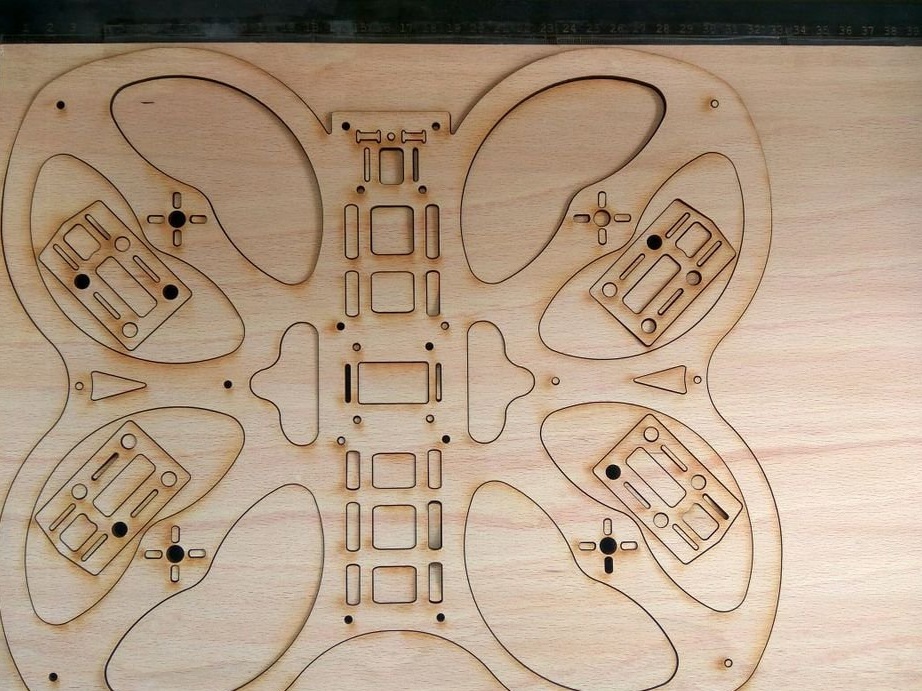
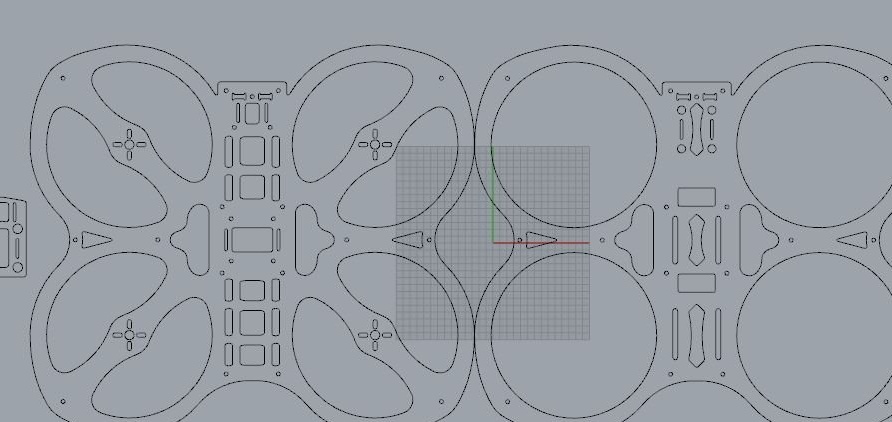
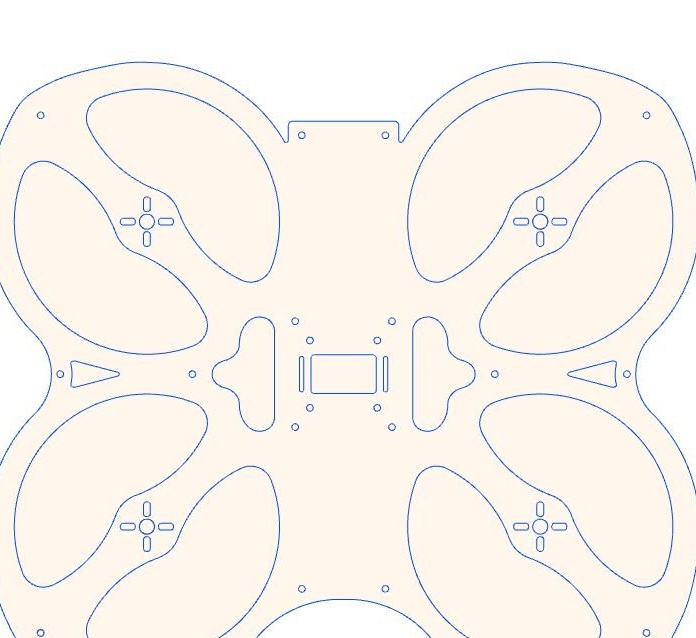
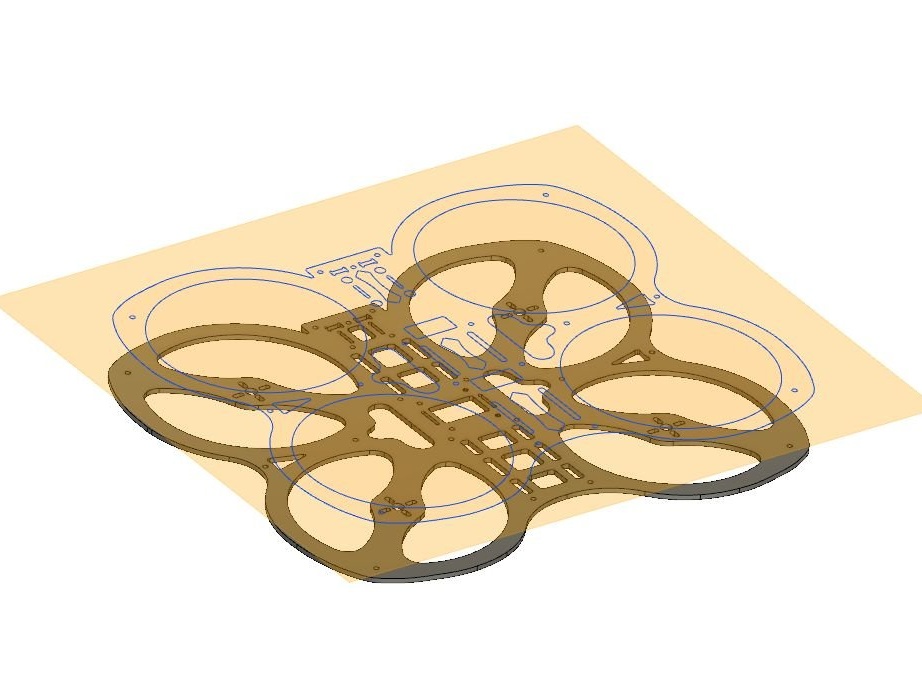
Le design du cadre a été inspiré par la forme du papillon monarque.Lorsque vous regardez le cadre d'en haut, il ressemble à deux ailes.
L'assistant a dessiné la conception dans Fusion 360 et Rhino CAD. La taille du cadre est d'environ 230 mm, elle est due à la distance diagonale d'un moyeu moteur à un autre. Les tailles de cadre les plus populaires sont 210 mm, 250 mm, etc. Une fois que vous avez défini la taille du cadre, dessinez les supports de moteur.
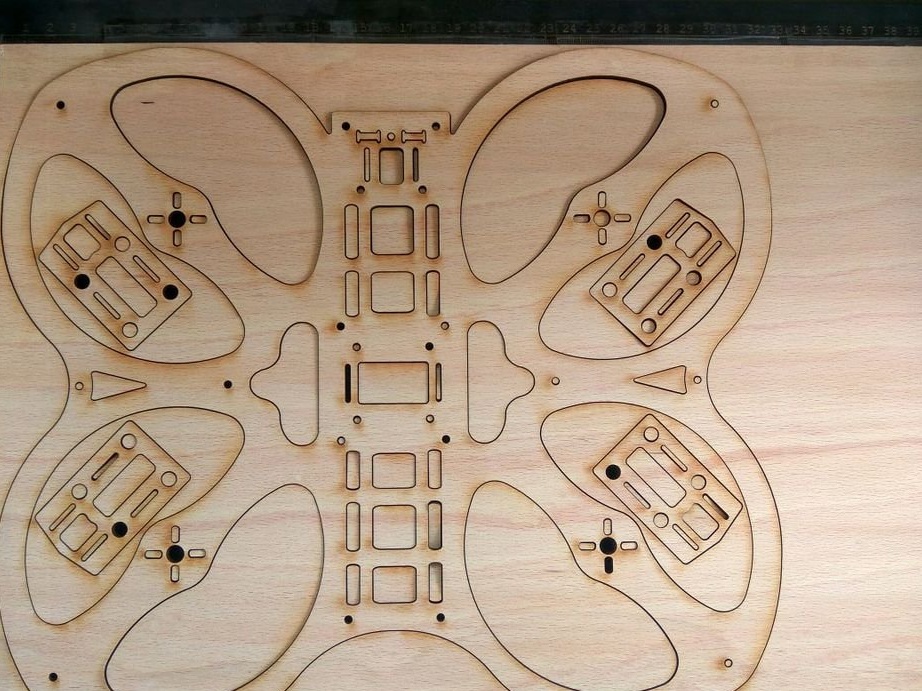
Le bâtiment central est l'endroit où toute l'électronique sera installée, y compris le contrôleur de vol, le récepteur, la batterie, etc. Au milieu, il y a 4 trous M3 à une distance de 30,5 mm les uns des autres.
L'ouvrage est réalisé par découpe laser. Si vous n’avez pas de cutter, vous pouvez couper dans l’atelier. Le fichier de découpe peut être téléchargé ci-dessous.
File Design.rar









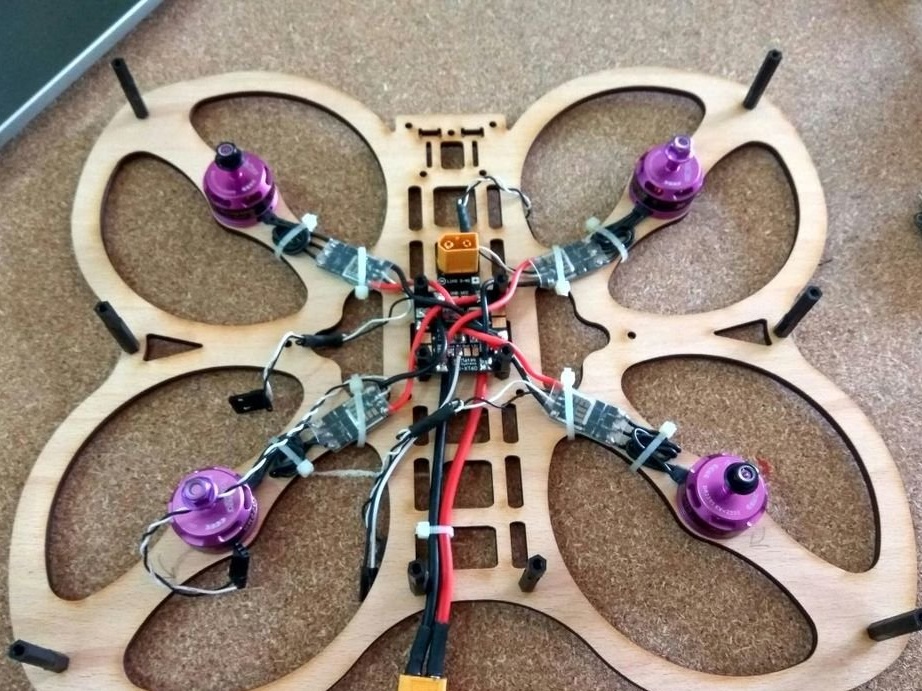
Troisième étape: construire
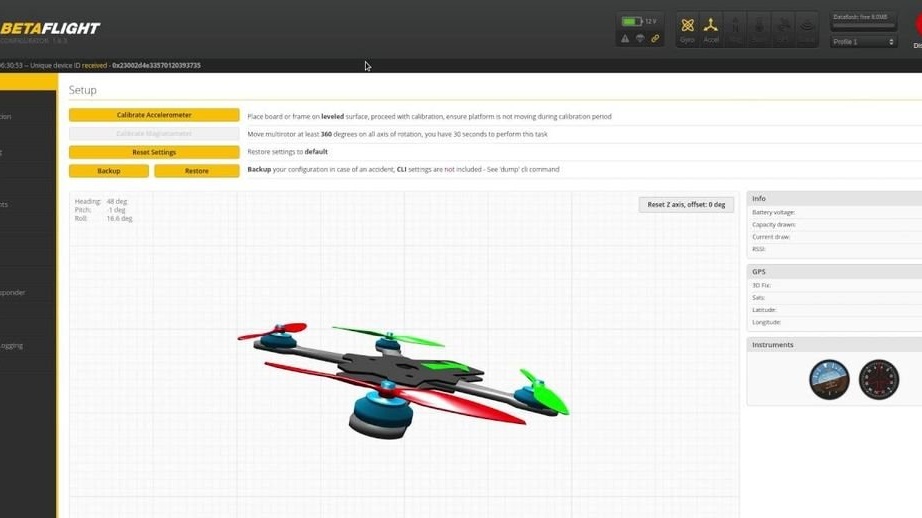
Vous devez maintenant assembler un quadricoptère.
Vous devez d'abord flasher le contrôleur avec le firmware Betaflight. Calibrez ensuite le capteur. Connectez le module radio et vérifiez son fonctionnement. Montez les moteurs sur le châssis selon le schéma du châssis X avec le bon sens de rotation. Souder les fils du moteur aux bornes de l'ESC et fixer l'ESC au support. Fixez la carte de distribution d'alimentation et soudez les plots ESC. Connectez le Soler XT60 au câble d'alimentation, puis à la carte de distribution d'alimentation. Réparez le contrôleur. Connectez les fils de l'ESC au contrôleur de vol. Montez le récepteur sur le châssis. Mettez le couvercle supérieur.