



Un coupe-mousse est un excellent outil pour fabriquer des pièces pour les avions. Cette machine vous permet de découper avec précision n'importe quelle forme du profil aérodynamique selon CAD.
La machine a un fil nichrome tendu entre deux guides. Le courant passe à travers le fil, le fil est chauffé et les guides se déplacent, découpant des contours complexes, tels que des ailes coniques. Chaque axe est entraîné par un moteur pas à pas à travers la broche, la courroie GT2 et la poulie. La force de coupe doit être minimale et la structure doit être suffisamment rigide pour résister à la tension du fil tendu entre les supports.
Il s'agit d'une véritable machine à 4 axes qui peut couper différentes formes des deux côtés en même temps, donc le problème est de savoir comment contrôler quatre axes indépendants en même temps. De nombreux didacticiels se concentrent sur les machines à 3 axes, telles que les imprimantes 3D, mais la documentation sur la création d'une machine à 4 axes semble insuffisante à l'aide de pièces facilement disponibles et d'un logiciel open source. Le maître a trouvé plusieurs personnes qui ont fait des projets similaires en utilisant Arduino et Grbl, et a décidé de faire sa propre machine.
Outils et matériaux:
- Contreplaqué (12 mm);
-Tiges en métal;
- Vis mère (M8 x 600 mm);
-Accouplement moteur M8-M5 (M8 pour la vis mère et M5 pour l'arbre du moteur);
-Arduino Mega 2560;
-RAMPS 1.4;
-Moteurs pas à pas (un pour chaque axe);
-A4988 Pilote pas à pas (un pour chaque moteur pas à pas);
- Alimentation 12V pour Arduino + rampes;
-Alimentation variable (chargeurs Lipo avec mode Hot-wire);
-Fil nichrome;
Première étape: logiciel
La partie difficile de la création d'une CNC à 4 axes consiste à trouver un logiciel pour générer le code G et contrôler la machine. Une recherche de logiciel a conduit au créateur de https://www.marginallyclever.com/2013/09/how-to-build-a-4-axis-cnc-gcode-interpreter-for-arduino/, développé par Marginally clever, qui utilise Écran Arduino Mega 2560 et CNC Ramps 1.4.
Certaines informations ont été utilisées par les auteurs suivants: Rckeith et rcgroups.com
Grbl Hotwire Controller.zip
GRBL8c2mega2560RAMPS.zip
FoamXL 7.0.zip
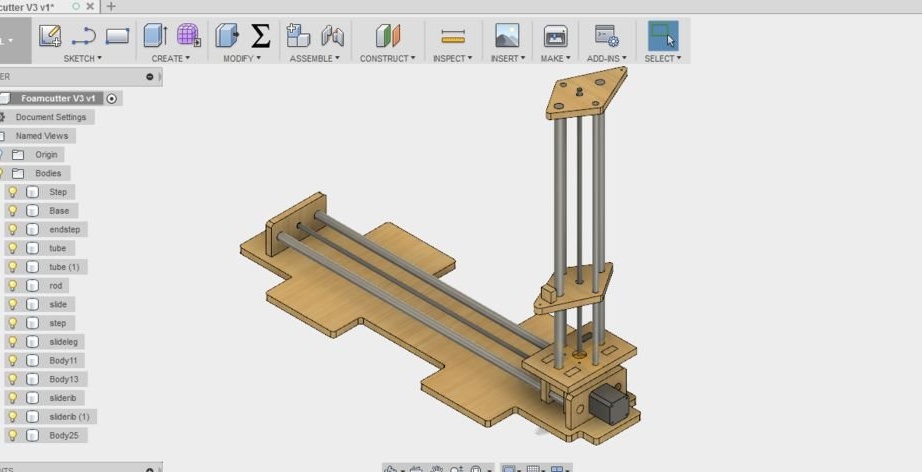
Deuxième étape: assemblage de la machine
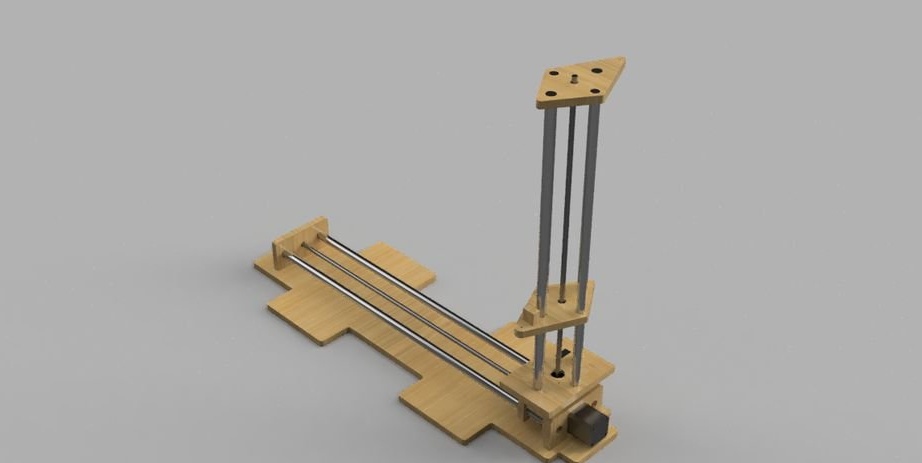
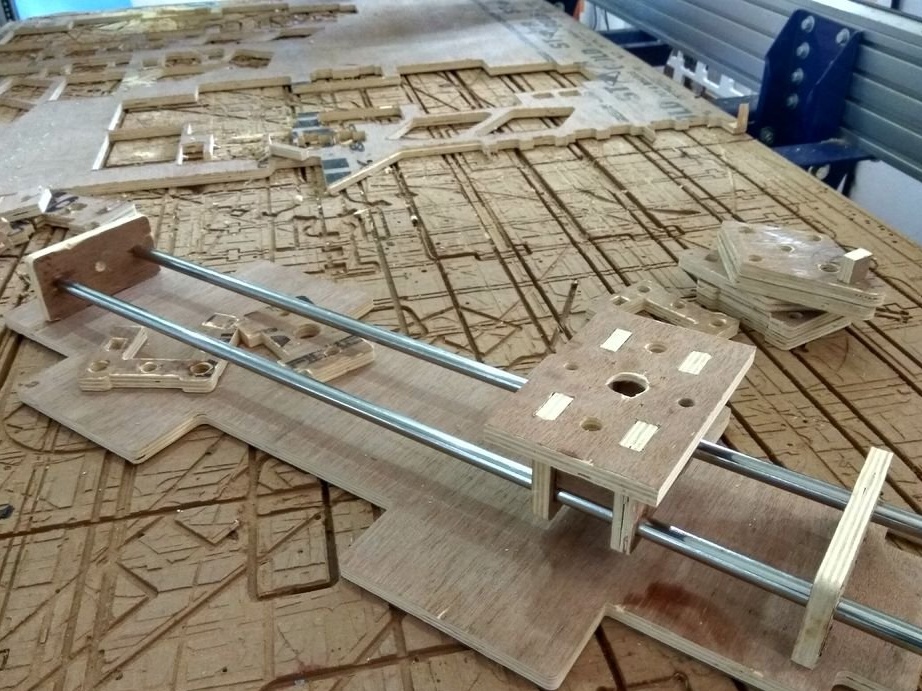
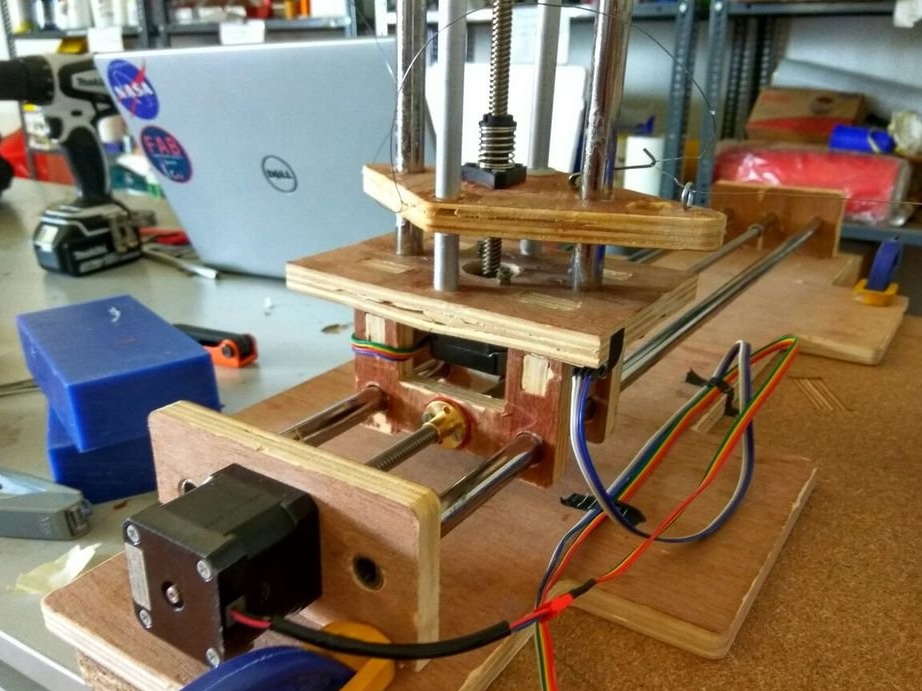
La conception est en contreplaqué de 12 mm, l'ensemble linéaire est constitué de tuyaux en acier d'un diamètre de 1/2 pouce avec des blocs coulissants en contreplaqué. La conception des blocs coulissants peut être améliorée en installant un roulement ou un manchon linéaire.Puisque le maître utilise une vis mère, il a suffisamment de couple pour surmonter la friction sans roulement. Deux tuyaux en acier supportent et maintiennent le bloc de guidage sur le même axe.
Des piliers verticaux sont placés sur le dessus du bloc de guidage horizontal. Il a quatre tuyaux.
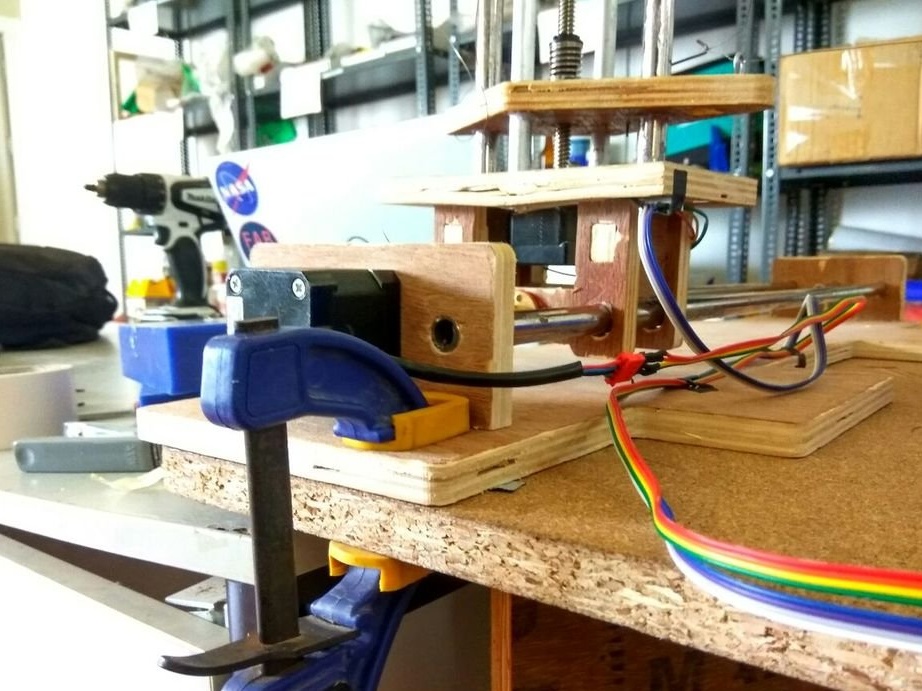
La vis d'entraînement est fixée au moteur pas à pas à l'aide d'un accouplement flexible. Cela aide à tout léger désalignement de l'arbre et de la vis. Le montant a un moteur pas à pas avec une vis de plomb intégrée, qui peut être acheté ou remplacé par un moteur pas à pas conventionnel et un embrayage.
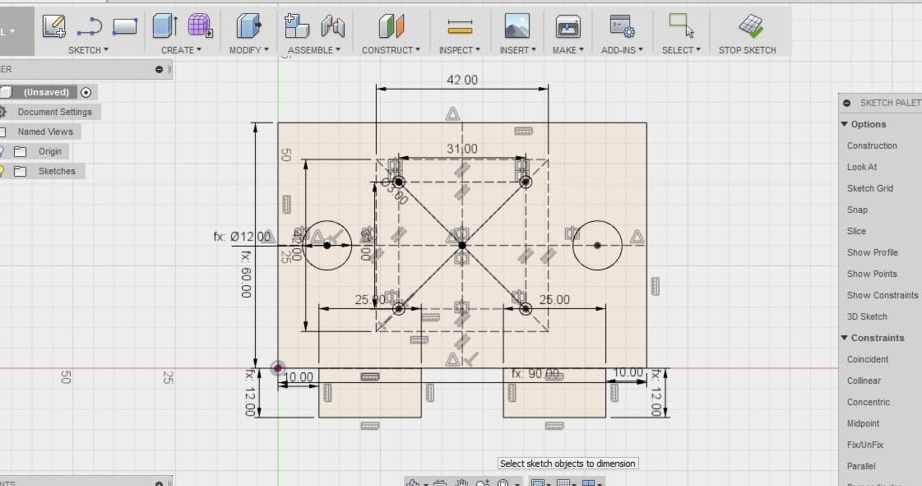
Les deux supports de machine sont identiques. À la base, il y a un endroit pour fixer la machine au bureau.


Remarque Lors de l'utilisation de paliers lisses, selon le matériau, un phénomène appelé «collage et glissement» peut se produire. Cela pourrait rendre le mouvement irrégulier et provoquer des vibrations. Cela peut également entraîner un blocage, entraînant des charges excessives et des étapes sautées lors de l'utilisation d'un moteur pas à pas.
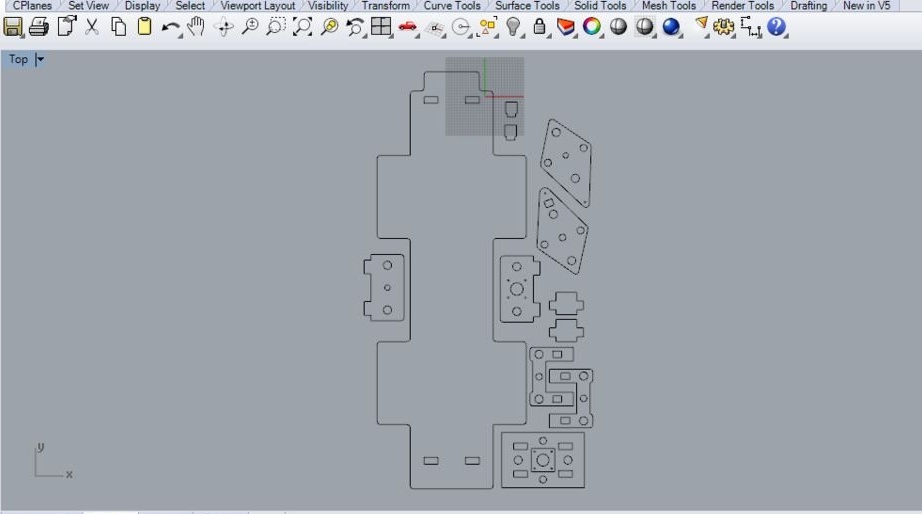
Foamcutter_base.dxf
Troisième étape: connecter l'électronique
L'étape suivante consiste à connecter l'électronique, à déplacer les moteurs et à configurer la machine. Il y a 4 moteurs pas à pas qui doivent être connectés à la plateforme Ramps. Les fils doivent être posés à fond pour assurer un mouvement d'essieu suffisant.
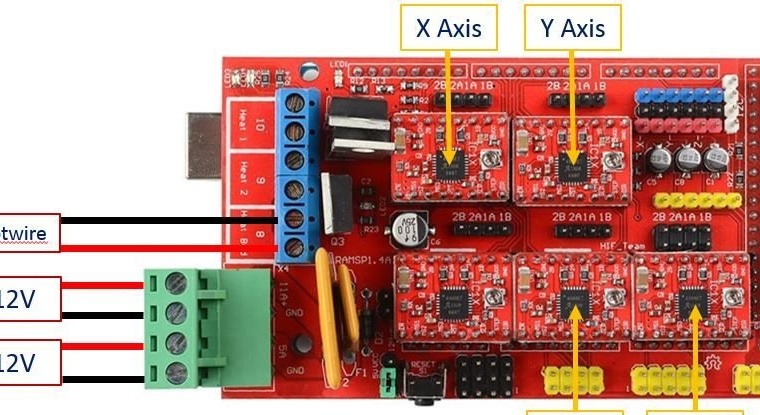
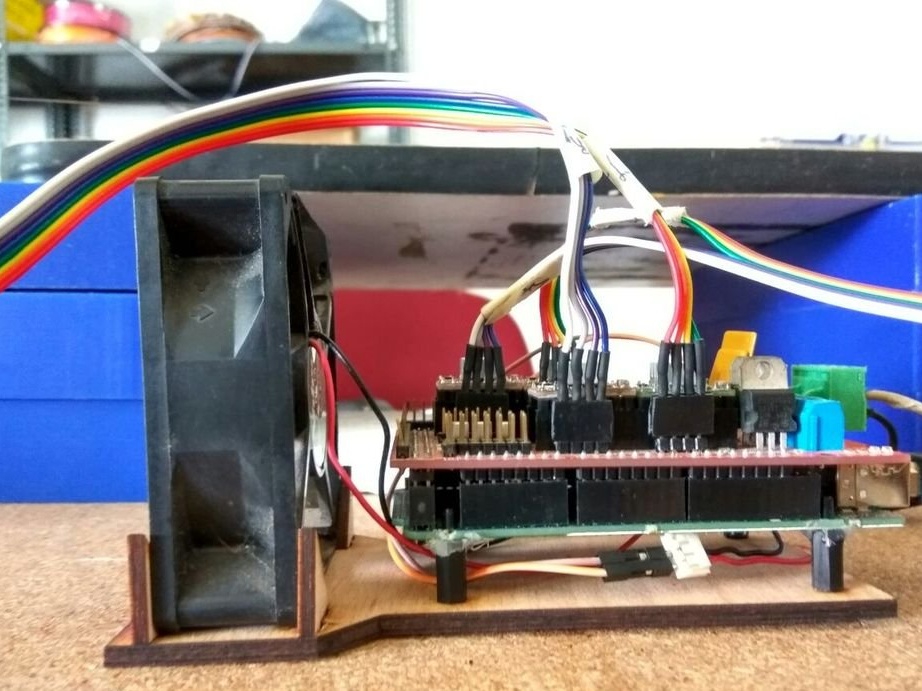
Tout le câblage est connecté à la carte Ramps, qui est un écran CNC pour l'Arduino Mega2560. La rampe peut prendre en charge jusqu'à 5 pilotes de moteur pas à pas tels que l'A4988. Le maître utilise des moteurs Nema 17.
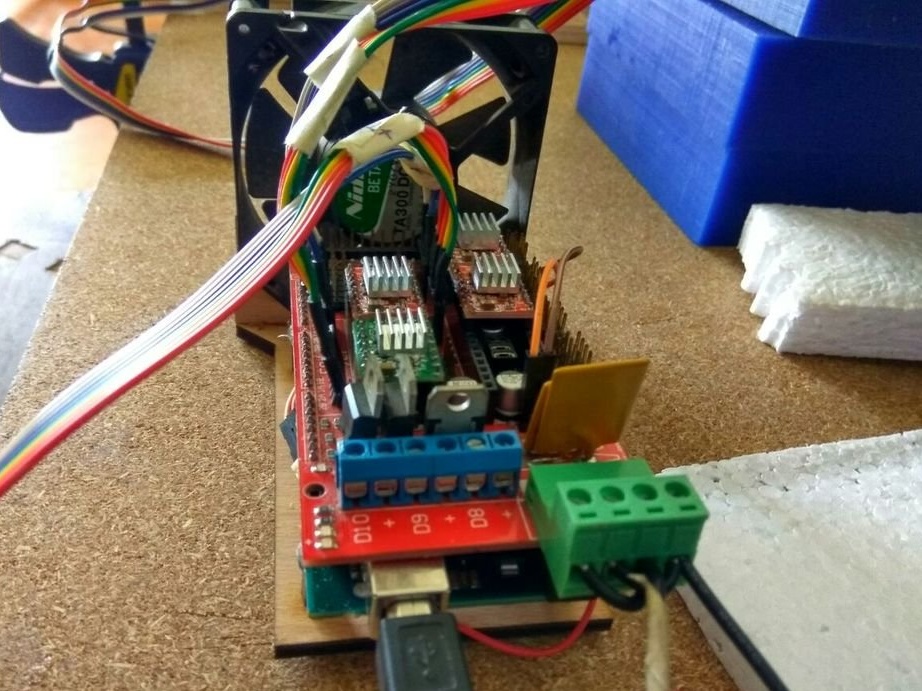
Avant d'installer sur une carte Ramps, assurez-vous que la puce A4988 est correctement orientée. Chaque moteur pas à pas peut tirer jusqu'à 2 A, les pilotes de moteur pas à pas sont équipés de radiateurs pour la dissipation thermique. La carte dispose également d'un MOSFET 11A pour contrôler la température du fil connecté à la broche D8. Tous les composants de la carte sont chauffés, assurez-vous qu'un refroidissement correct est assuré.
Lorsque le système est allumé, les moteurs pas à pas continuent de tirer du courant pour maintenir une position de maintien. Les composants tels que les pilotes Stepper et MOSFET peuvent devenir très chauds pendant le fonctionnement. N'utilisez pas de rampes sans refroidissement actif.
Le maître a découpé au laser la base de l'Arduino et des rampes et a connecté un ventilateur 12V pour fournir un refroidissement actif à la carte.
Quatrième étape: configuration
Chaque CNC doit être correctement configurée avant de commencer le travail. Étant donné que les moteurs pas à pas sont utilisés dans un système en boucle ouverte (sans rétroaction), vous devez savoir jusqu'où le chariot se déplacera à chaque révolution du moteur pas à pas. Cela dépend du nombre de pas par tour du moteur, du pas de la broche et du niveau de micro-transition utilisé.
steps_per_mm = (motor_steps_per_rev * driver_microstep) / thread_pitchIl utilise un moteur pas à pas avec un pas de 200 tr / min. entraîné par le pilote A4988 à 1/16 micropas, avec une vis mère par incréments de 2 mm.
Steps_per_mm = (200 * 16) / 2 = 1600La vis utilisée par le maître était à double face, la valeur sera donc la moitié de celle indiquée ci-dessus, c'est-à-dire «800». Si la vis est à quatre étages, la valeur sera un quart de ce qui précède.
Après avoir flashé Mega 2560 avec le fichier Grbl8c2MegaRamps, ouvrez le moniteur de port série et entrez «$$» pour accéder au panneau des paramètres Grbl. Pour modifier une valeur, entrez $ number = value. Par exemple, $ 0 = 100 Après avoir configuré la machine, assurez-vous que la machine déplace la valeur exacte comme indiqué dans le contrôleur.
Cinquième étape: Nichrome
Pour couper la mousse, vous avez besoin d'un fil fait d'un matériau approprié qui peut résister à la chaleur et aura la même température sur toute la longueur.
Nichrome est un matériau approprié. Il est préférable d'utiliser un fil aussi fin que possible pour réduire les rainures pendant la coupe et pour garantir des lignes de coupe propres. En règle générale, plus le fil est long, plus la tension à appliquer est importante et plus le fil est épais.
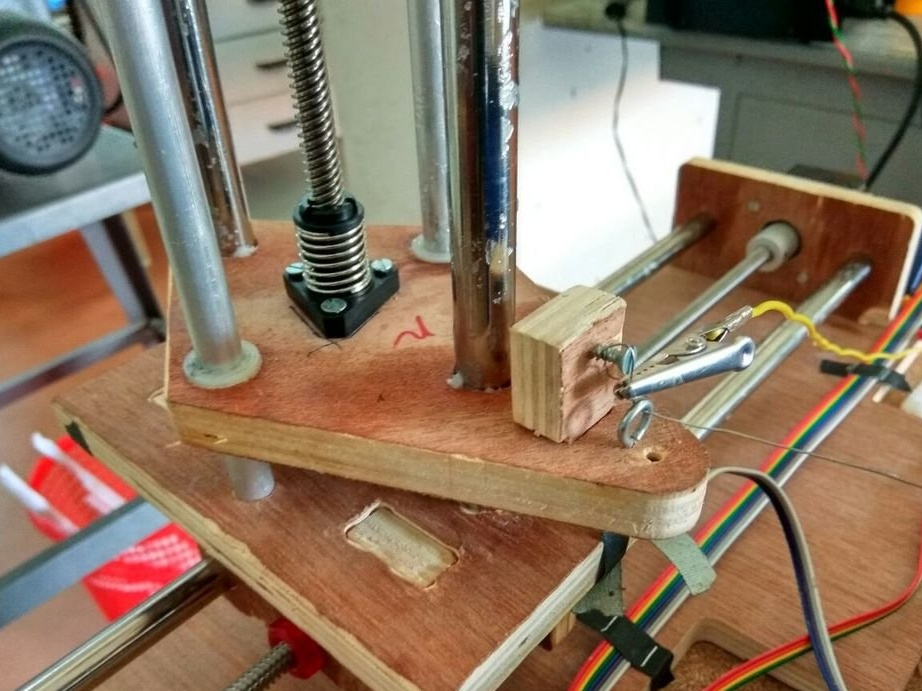
L'étape suivante consiste à attacher le fil nichrome à la machine. Comme nous avons 4 axes indépendants, nous ne pouvons pas simplement accrocher les deux extrémités du fil sur les supports.Le fil doit avoir un certain allongement, soit au moyen d'un ressort, soit au moyen d'un poids attaché aux extrémités.
Une tension constante peut être appliquée au fil au moyen d'un ressort à force constante ou d'un poids suspendu à l'extrémité. Un moyen peu coûteux d'obtenir un ressort avec une force constante consiste à utiliser Bobines de carte d'identité.

Étape 6: Génération de logiciels et de codes G
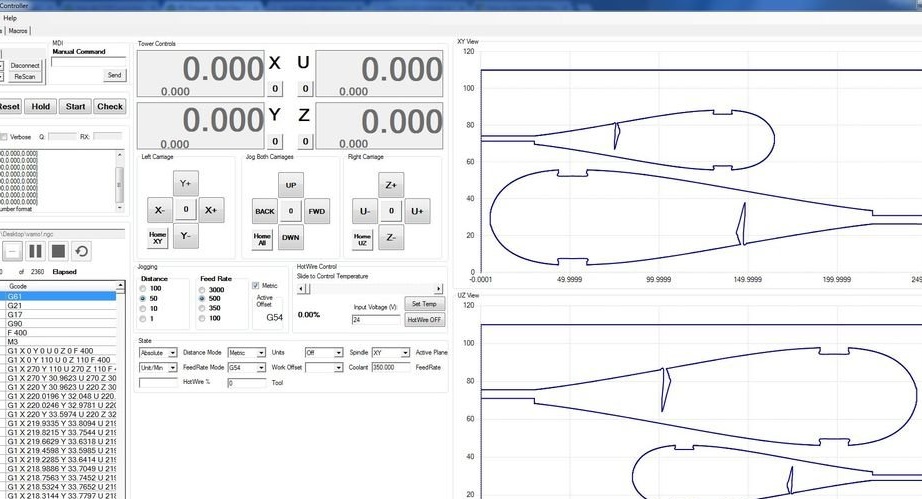
Contrôleur Grbl Hotwire
L'assistant utilise le panneau de contrôle Grbl, développé par Garret Visser, qui a été adapté pour la découpe par Hotwire par Daniel Rassio. Le panneau dispose d'un contrôle de mode indépendant pour tous les axes. Il existe également un outil de visualisation, un graphique «Gcode» et la possibilité de sauvegarder vos propres macros. La température du fil chaud peut être contrôlée en utilisant M3 / M5 pour allumer / éteindre et la commande S «xxx» pour régler la tension de sortie, soit manuellement, soit en utilisant la barre de défilement dans le logiciel. Le fil chaud doit être connecté à la sortie «D8» et être alimenté par une source d'alimentation connectée à l'entrée «11A» sur les jonctions de ligne.
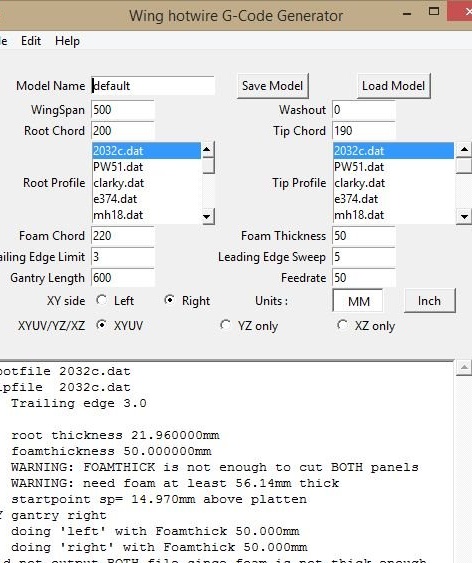
Générateur de code g de l'aile
Générateur de code g de l'aile est un programme pour générer le code XYUV GY pour la découpe à chaud des ailes de modèles d'avion. Il fonctionne sur Python 2.7 et peut également s'intégrer à l'interface LinuxCNC Axis. Il existe également une version en ligne. Cela vous permet d'entrer différents paramètres de l'aile. Il existe une base de données de profils aérodynamiques au format .dat. Les nouveaux profils peuvent être importés de la même manière.
Ce logiciel est facile à utiliser et prend en charge la superposition des ailes sur le même morceau de mousse pour économiser du matériel. Le code G de sortie peut être envoyé à la machine via le contrôleur Grbl.
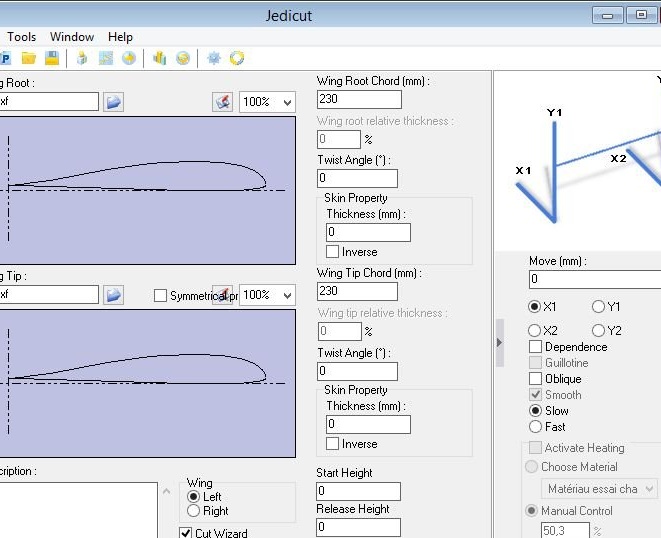
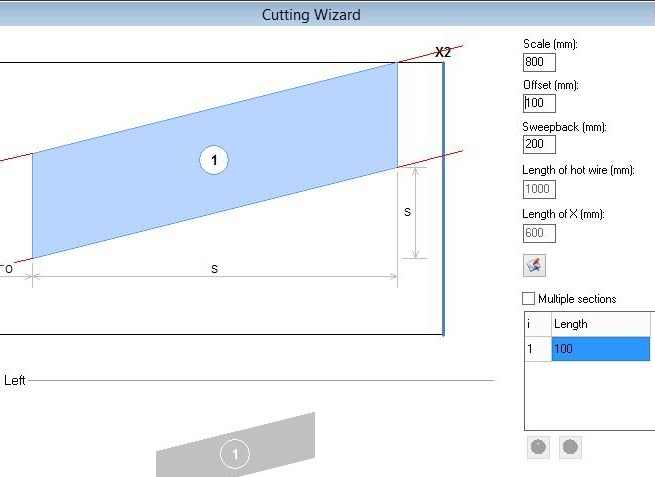
2.4 Jedicut
Jedicut - C'est un programme sympa qui peut exécuter à la fois la CAO / FAO et exécuter les fonctions d'un contrôleur de machine. Il existe également un plugin pour générer du G-code. Ce n'est pas le programme le plus simple à configurer. Certaines options et messages d'erreur sont en français, mais si vous travaillez avec lui pendant un certain temps, vous pouvez le faire fonctionner.
Le G-code de Wing génère des G-codes en mode absolu, qui s'exécute sur Grbl sans aucun problème, mais Jedicut génère du G-code en mode incrémentiel. Le capitaine a eu des difficultés au premier démarrage, lorsque la voiture a simplement fait des allers-retours. Si cela se produit, modifiez le code G pour supprimer les lignes inutiles dans l'en-tête.
Le code Wing G et Jedicut génèrent du code G avec des codes Grbl non pris en charge dans l'en-tête. Le contrôleur s'affiche sur le moniteur lorsque de telles erreurs se produisent. Modifiez le code G et supprimez les lignes de code inutiles.
Des codes G fonctionnels avec les deux programmes sont inclus, utilisez-les pour vérifier le contrôleur.
Jedicut.rar
winggcode.rar
Septième étape: réglage de la vitesse d'avance et de la température
Contrairement au fraisage conventionnel, le fil est coupé par fusion de la mousse. Lorsque le fil reste dans une position pendant un certain temps, le matériau environnant continue de fondre. Cela augmente la rainure de la coupe et provoque des imprécisions de taille. Deux variables affectent la largeur de la coupe.
Vitesse d'avance de coupe.
Température du fil.
La vitesse d'avance de coupe est la vitesse à laquelle le fil coupe le matériau, de préférence en mm / min. Plus la vitesse est élevée, plus la fente est petite, mais plus la température requise et la tension dans le fil doivent être suffisantes. Les bonnes vitesses de démarrage sont de 350 à 500 mm / min.
La température du fil doit être légèrement supérieure à la température de fusion de la mousse. La température est contrôlée par le courant traversant le fil.
Il existe un logiciel qui permet au contrôle PWM du fil de le chauffer aux bons moments afin d'optimiser la vitesse d'avance de coupe. La température du fil est déterminée par le carré des temps actuels de la résistance.
Il y a un spécial calculatriceoù vous pouvez faire tous les calculs nécessaires.
Étape huit: Fonctionnement de la machine
Le processus commence par une conception qui est exportée en tant que fichier DXF. Ce fichier est ensuite importé dans le logiciel CAM et sorti sous forme de G-code. La machine est allumée et calibrée. Le matériau est placé sur un établi et la position de départ est définie. Exécutez le fichier G-code et voyez comment l'appareil fait tout le travail pour vous.
Selon le capitaine, la machine est facile à fabriquer et facilite le travail des maquettes d'avions.




Dans la vidéo ci-dessous, vous pouvez voir un exemple de la machine.