
Un dispositif intéressant a été inventé et fabriqué par le Maître, c'est un appareil pour plier du fil de toute forme. La fabrication de ressorts est l'une de ses caractéristiques. Cette machine est capable de plier un fil de 0,8 / 0,9 / 1 mm dans n'importe quelle forme 2D.
L'objectif principal de la fabrication de cette machine était d'automatiser le processus de pliage. D'autres machines artisanales ne sont pas très précises et leurs courbures ont un rayon assez important.
La deuxième tâche consistait à le rendre aussi simple que possible en utilisant des pièces et des composants couramment disponibles. Certaines pièces de la machine sont imprimées sur une imprimante 3D et des pièces métalliques peuvent être achetées au magasin.
À quoi sert le maître d'une telle machine? Il s'intéresse à la fabrication de figurines LED, flocons de neige, étoiles, fleurs, etc. Dans leur fabrication, des pièces identiques en fil sont nécessaires, et cette machine facilitera leur fabrication.
Regardons une courte vidéo avec un exemple de l'appareil.
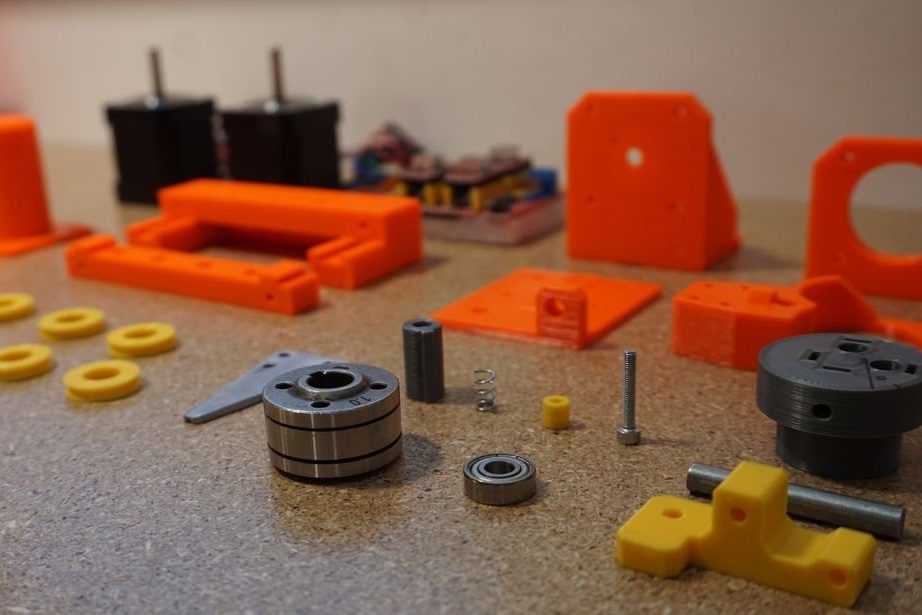
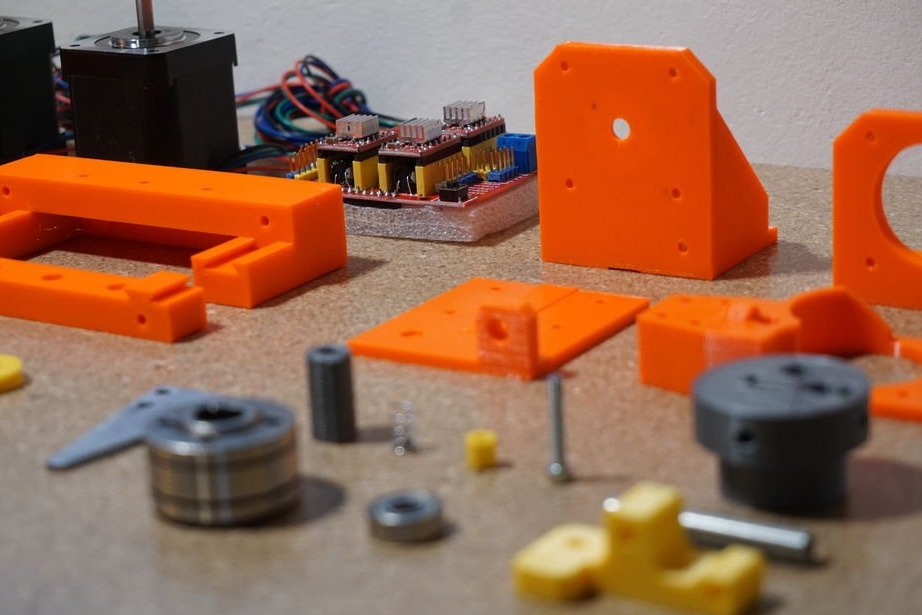
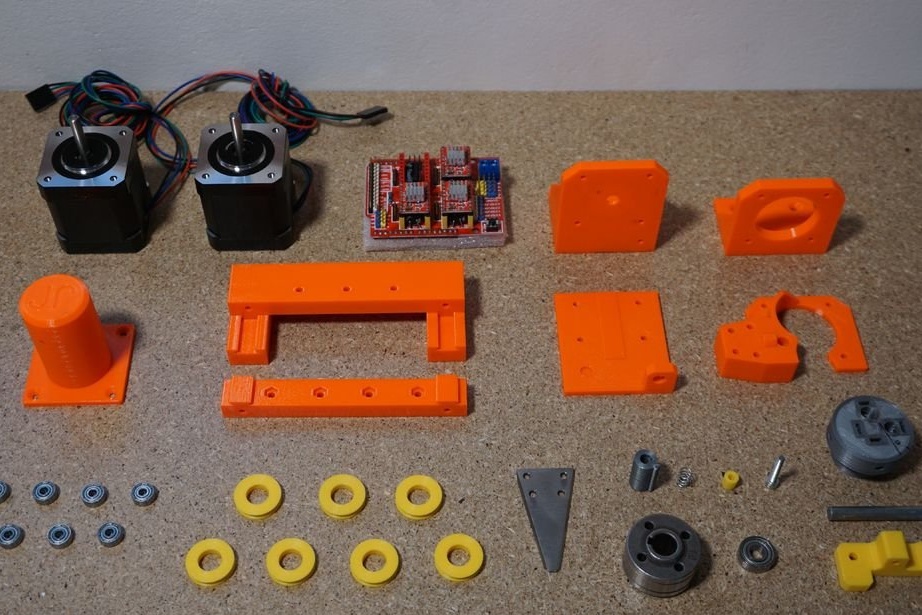
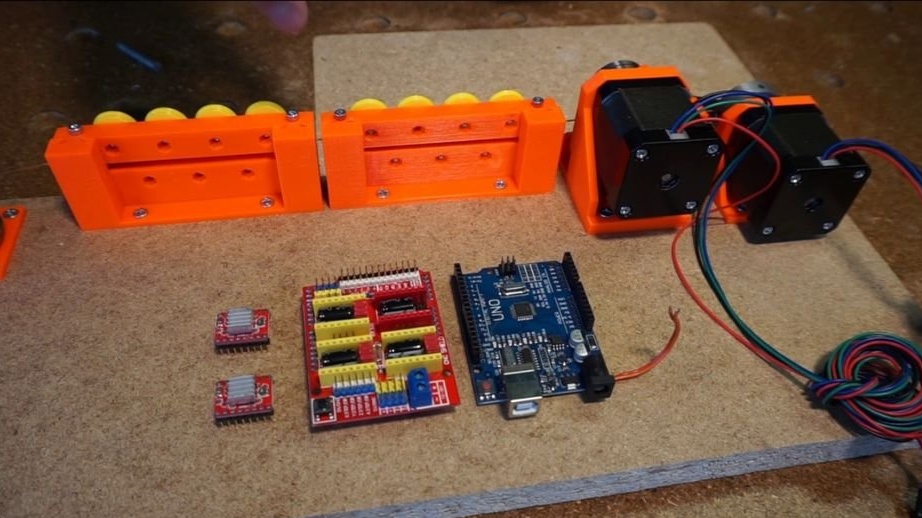
Ainsi, pour la fabrication d'une telle machine, le capitaine a utilisé ce qui suit
Outils et matériaux:
-Détails 3D (les fichiers d'impression peuvent être téléchargés ici);
-Fixations;
-Arduino UNO;
-Carte d'extension pour Arduino UNO;
- Pilote pas à pas A4988 -2 pièces;
-Moteur pas à pas NEMA17 -2 pcs;
-Alimentation 12V 3A;
- mécanisme de dévidage du fil;
-Ressort en acier 4x6 mm;
- Roulement 3x10x4 mm;
-Roulement 6x15x4 mm;
-Tige en acier de 6 mm;
- Tôle d'acier de 2 mm d'épaisseur;
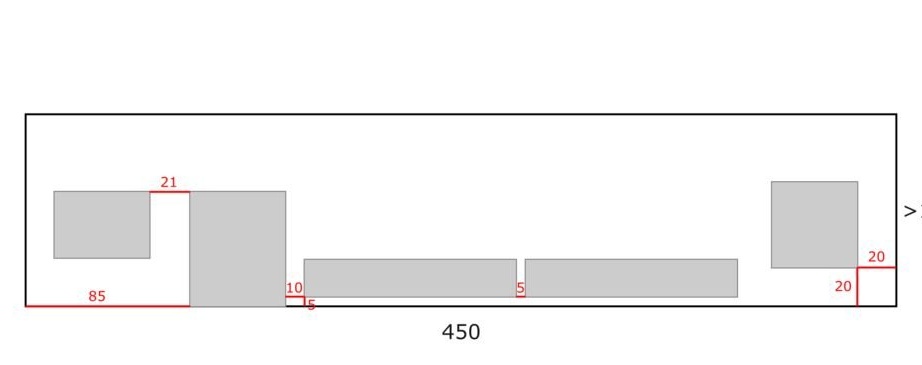
-Planche en bois pour la base 450x100 mm;
- tournevis;
-Gon;
Première étape: comment cela fonctionne
Voyons comment fonctionne la machine (de droite à gauche).
Porte-bobine - il contient la bobine de fil pour le traitement de la machine.
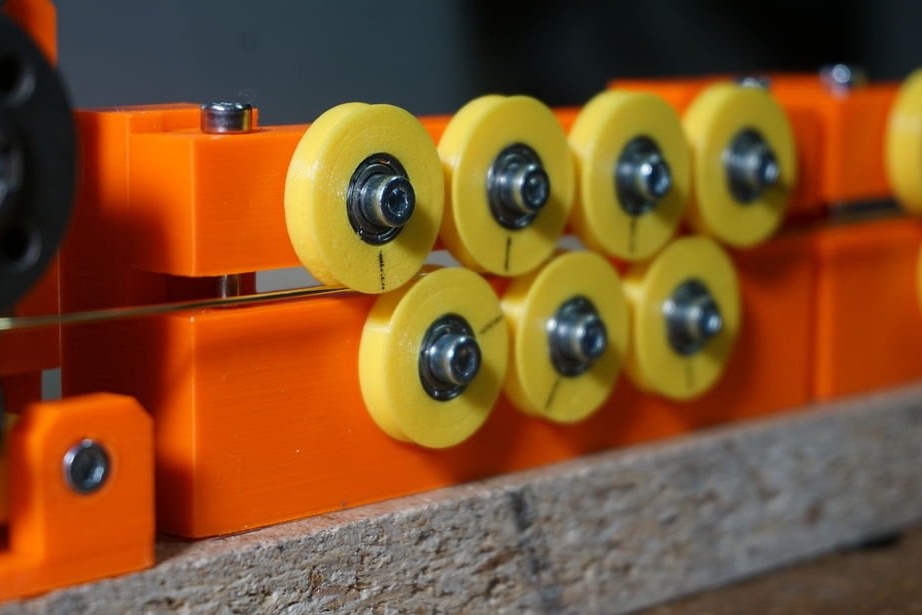
Redresseur - un ensemble de 7 rouleaux afin que le fil soit aussi uniforme que possible. Travailler avec du fil droit est crucial. C'est pourquoi deux redresseurs.
Broach - vous pouvez trouver un mécanisme similaire dans votre imprimante 3D. Un jeu d'engrenages tire le fil de la bobine à travers les rouleaux et le pousse vers la tête de pliage. Le mécanisme d'alimentation doit avoir une pression de fil suffisante pour qu'il ne glisse pas. Plus d'informations à ce sujet plus tard.
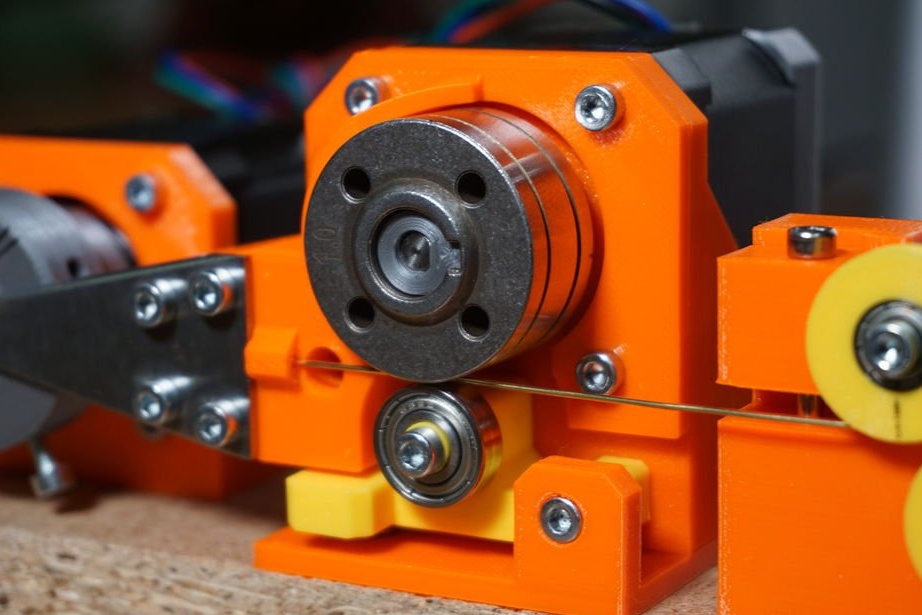
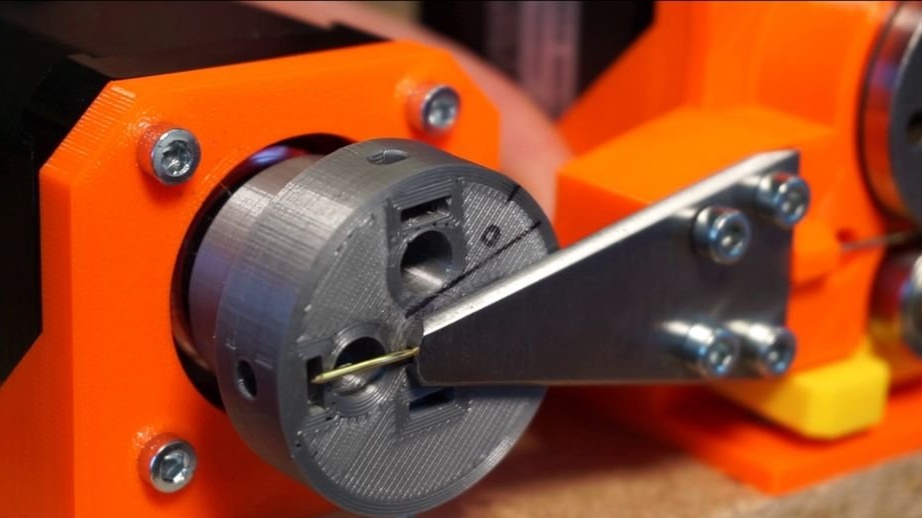
Cintreuse - elle plie le fil dans une forme programmée.
Tout cela est contrôlé par un Arduino UN avec un blindage CNC.Une commande est envoyée à l'Arduino depuis l'ordinateur et il les traduit en commandes pour les moteurs pas à pas.

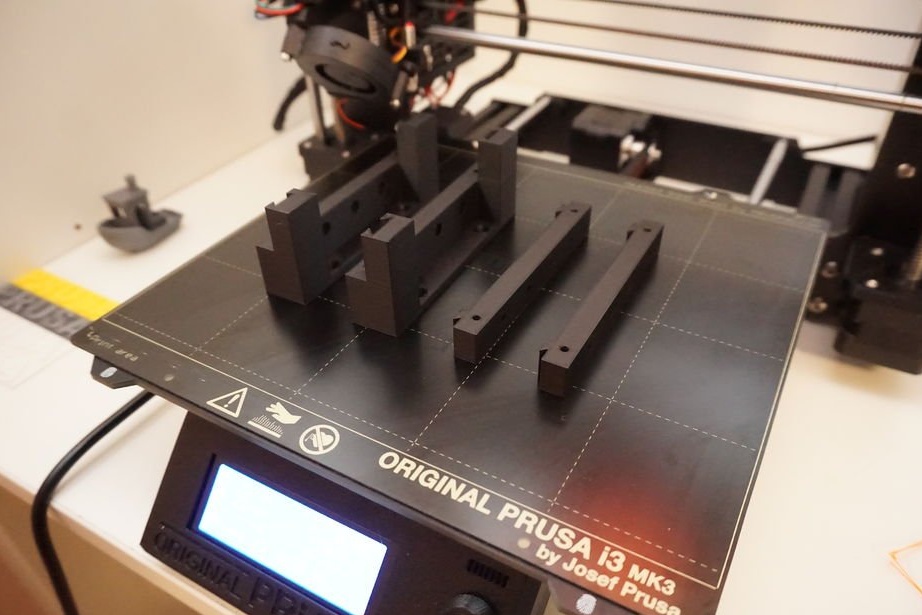
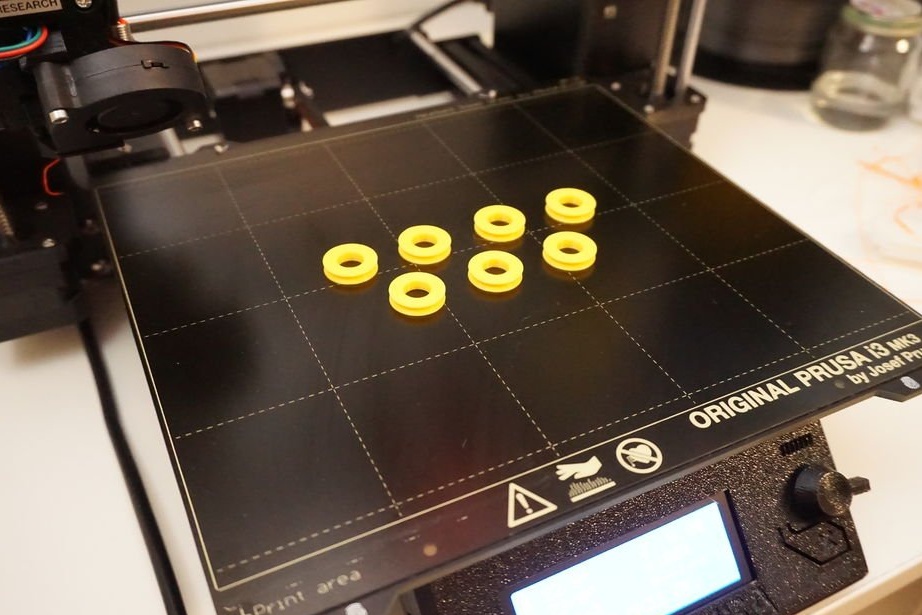
Deuxième étape: impression de pièces
Vous devez imprimer les détails suivants et dans la quantité suivante (pour éviter toute confusion, le texte original):
Bender
Tête d'outil
Cadre moteur
Feeeder
Cadre moteur
Cadre inférieur
Guide-fil
Chariot de pignon fou
Entretoise de pignon fou
Entretoise d'engrenage d'alimentation
Plaque de pliage (modèle)
Rouleaux redresseurs (2x)
Cadre de lit (2x)
Cadre d'engrenage supérieur (2x)
Rouleau (14x)
Porte-bobine
Hauteur de couche lors de l'impression 0,15 mm. Remplissage à 40%. L'impression prend 2 jours.
Troisième étape: machine à cintrer
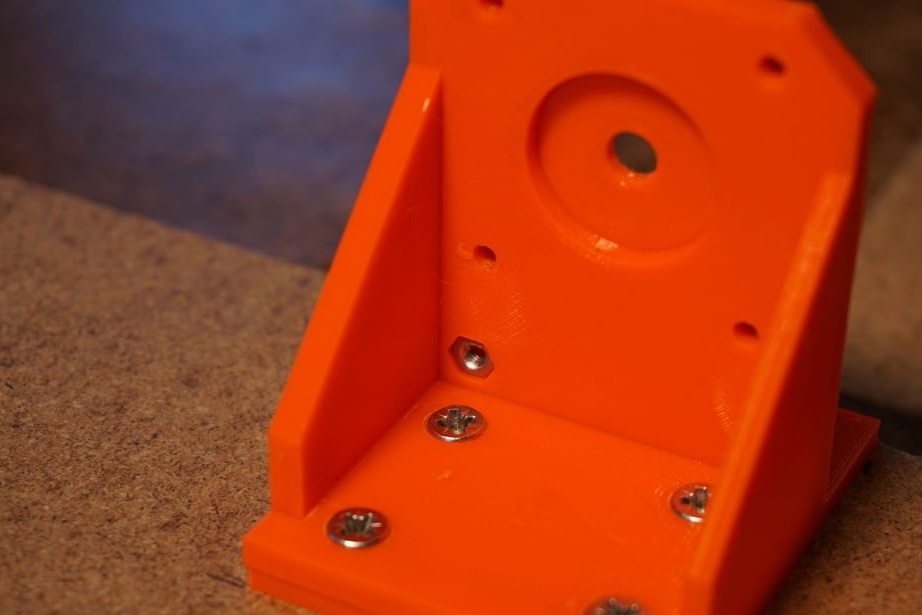
Le maître visse deux cadres à la base. Il est important d'installer les deux cadres comme indiqué sur le dessin.
Fixe le moteur pas à pas au châssis. Fixe la tête à l'arbre du moteur.


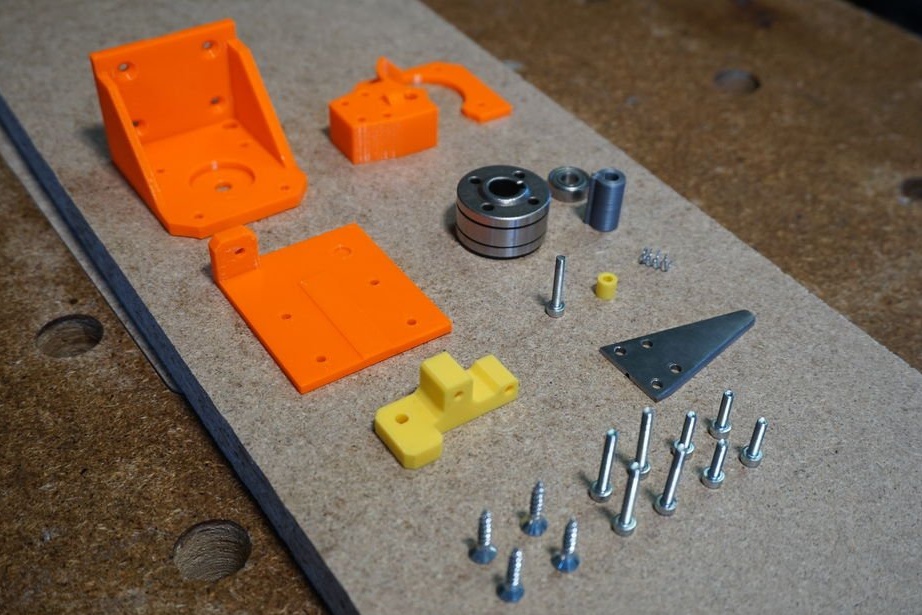
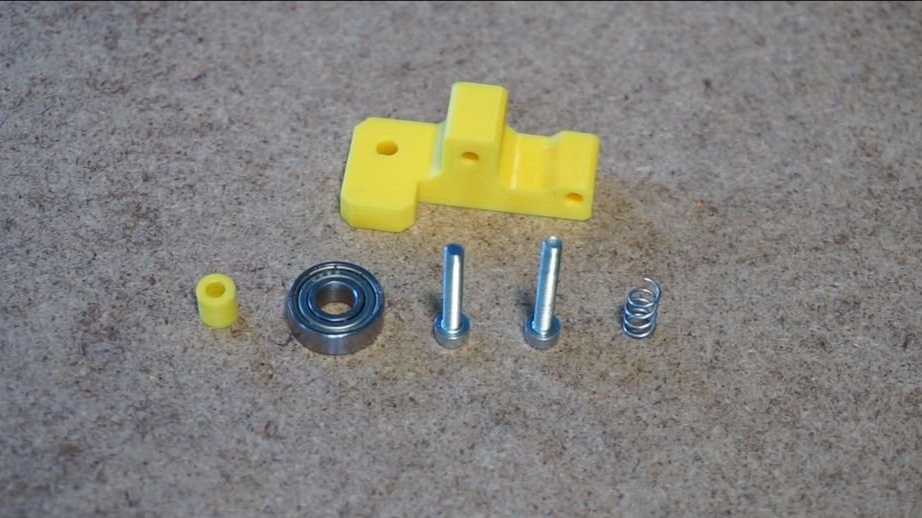
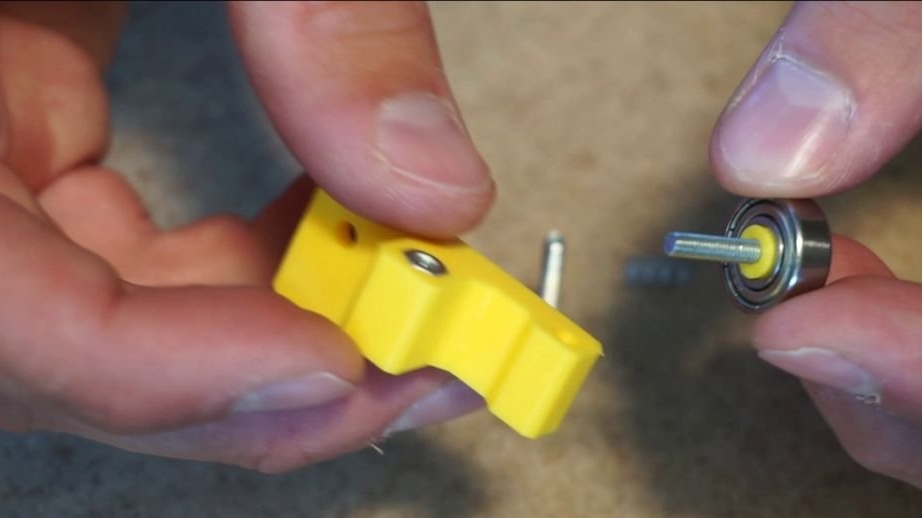
Quatrième étape: Broche
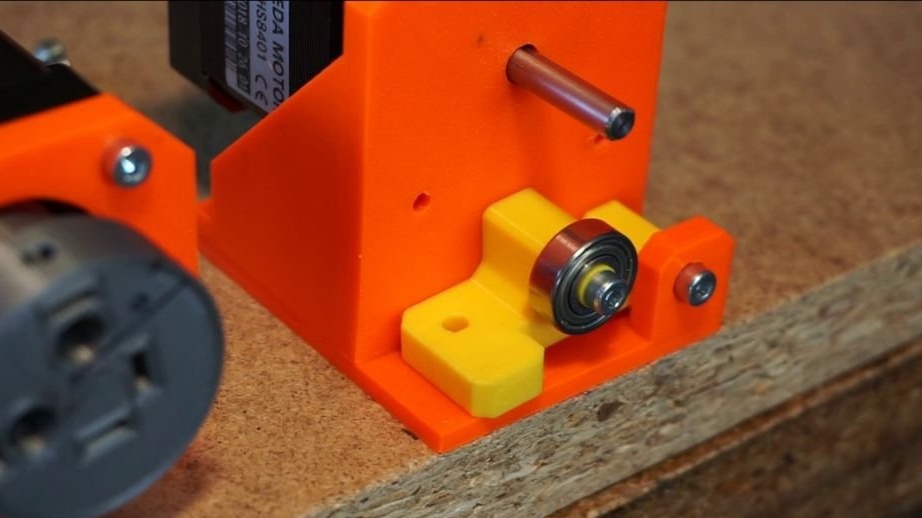
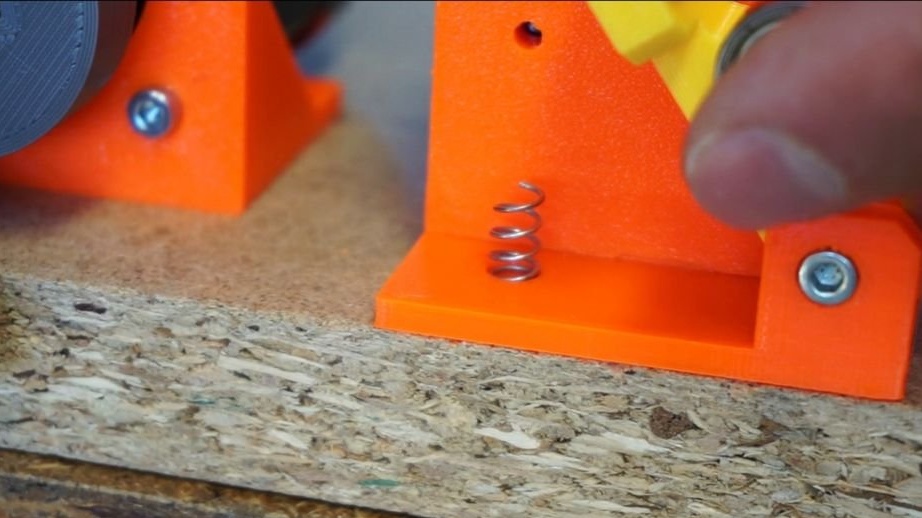
Le cadre est déjà installé, donc la première étape dans la création d'un mécanisme d'alimentation est de construire un chariot pour l'engrenage intermédiaire, qui pressera le fil sur le mécanisme d'alimentation. Retirez le joint en plastique à l'intérieur du roulement 6x15x4 mm. Installez le roulement sur le boulon M3x20. Installez l'écrou M3 dans le chariot et vissez le roulement sur le boulon. Assurez-vous que le roulement tourne librement. Insérez le deuxième écrou M3 dans le châssis du moteur (côté moteur dans le coin inférieur gauche) et vissez le chariot à travers le petit support à l'aide du boulon M3x20. Ne serrez pas trop le boulon, le chariot doit pouvoir bouger librement. Soulevez le chariot et insérez le ressort dans le trou en dessous.
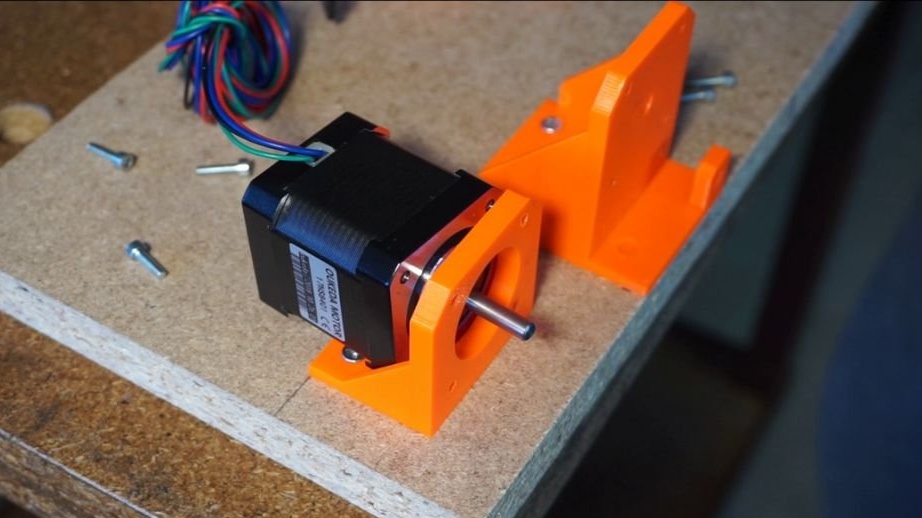
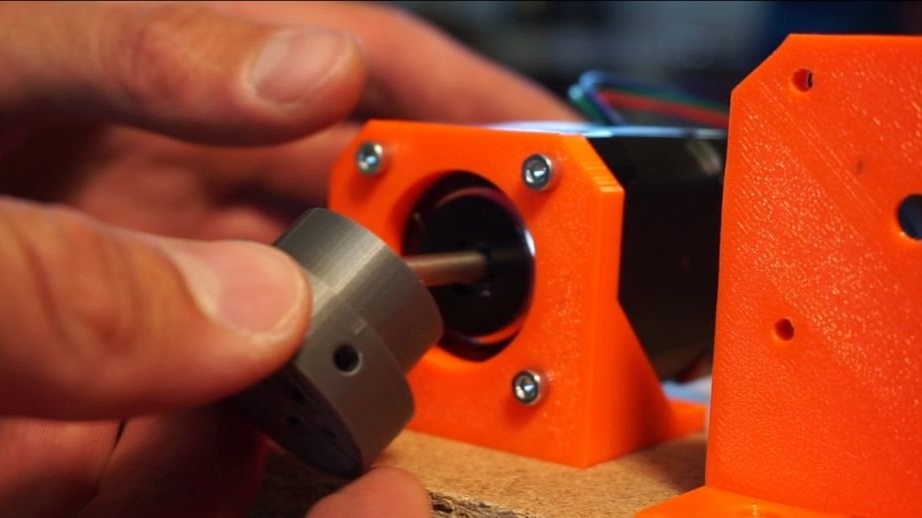
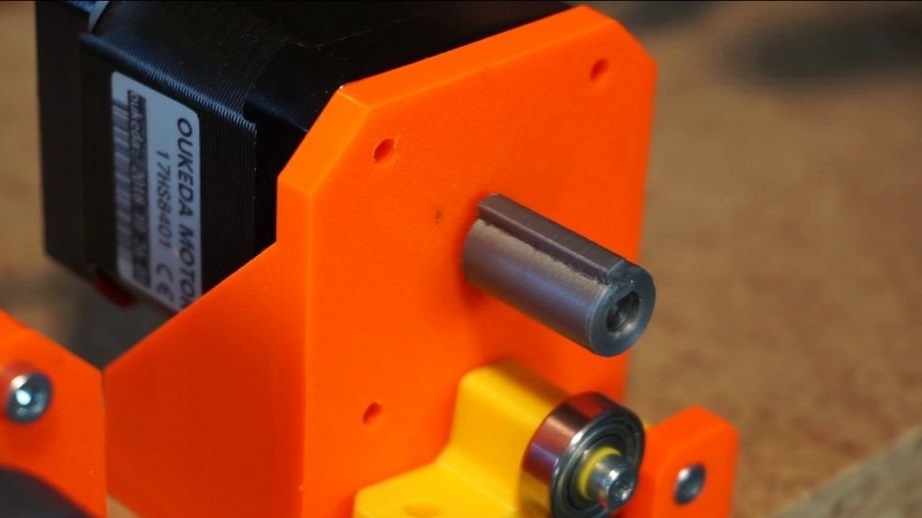
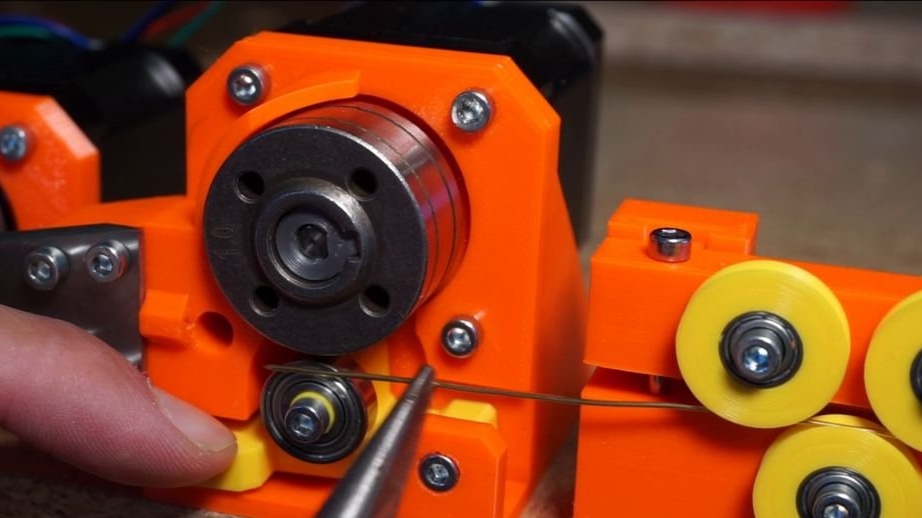
Prenez le deuxième moteur pas à pas et installez-le dans le châssis du moteur. Ne vissez pas encore. Appuyez l'entretoise du mécanisme d'alimentation sur l'arbre du moteur et installez le mécanisme d'alimentation.
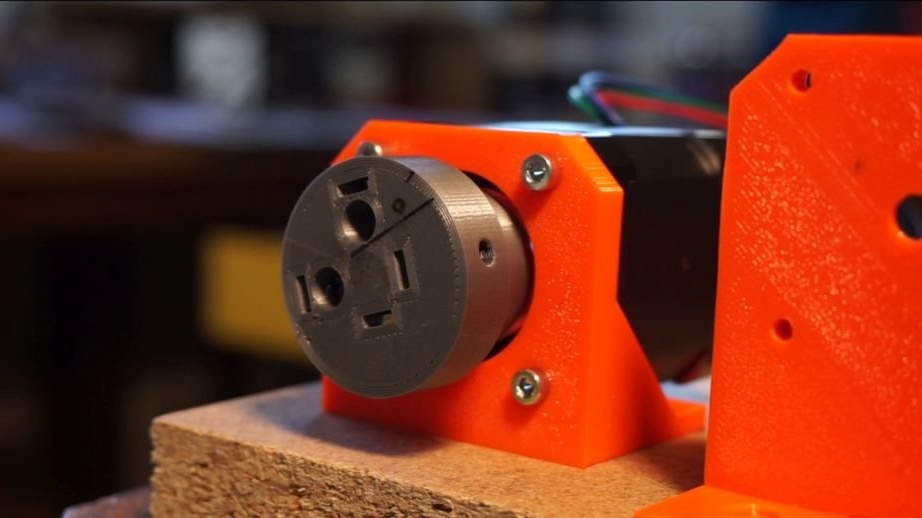
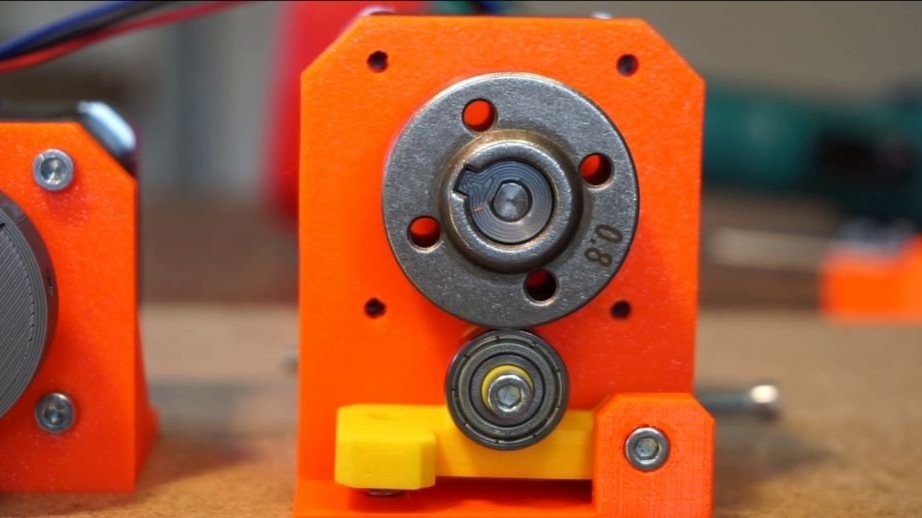
Le mécanisme d'alimentation utilisé par le maître provient d'une machine à souder MIG. Le mécanisme a deux évidements sur la bobine. Un pour fil de 0,8 mm et un pour fil de 1 mm. Contrairement aux engrenages (auparavant le maître essayait d'alimenter le fil avec eux), ce mécanisme ne laisse pas de marques sur le fil.
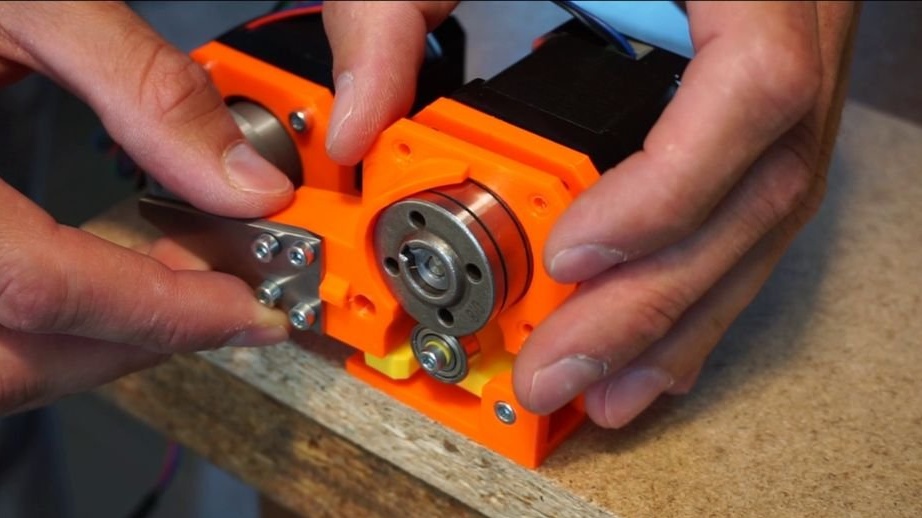
Le chargeur et le dispositif de pliage sont reliés par une plaque de pliage - une plaque métallique de 2 mm d'épaisseur avec une petite rainure sur la paroi arrière, qui alimente le fil directement au centre de la tête de pliage pour un pliage parfait. Pour l'impression, il existe une plaque de pliage en plastique qui fonctionne très bien, mais s'use rapidement et nécessite un remplacement fréquent. Vous pouvez l'utiliser ou faire une plaque métallique dessus.
Ensuite, prenez la partie en plastique du guide-fil et installez les quatre écrous M3 dans les trous à l'arrière. Vissez maintenant la plaque de cintrage avec les boulons M3x20. Placer le guide-fil devant le châssis du moteur du mécanisme d'alimentation et le fixer au moteur avec quatre boulons M3x12. Ajustez la position de la plaque de pliage. Il doit être exactement au centre de la tête de flexion.
La broche est prête. Si vous avez un fil droit, vous pouvez utiliser le fil dès maintenant. Sinon, vous avez besoin d'un redresseur.





Étape cinq: Broche
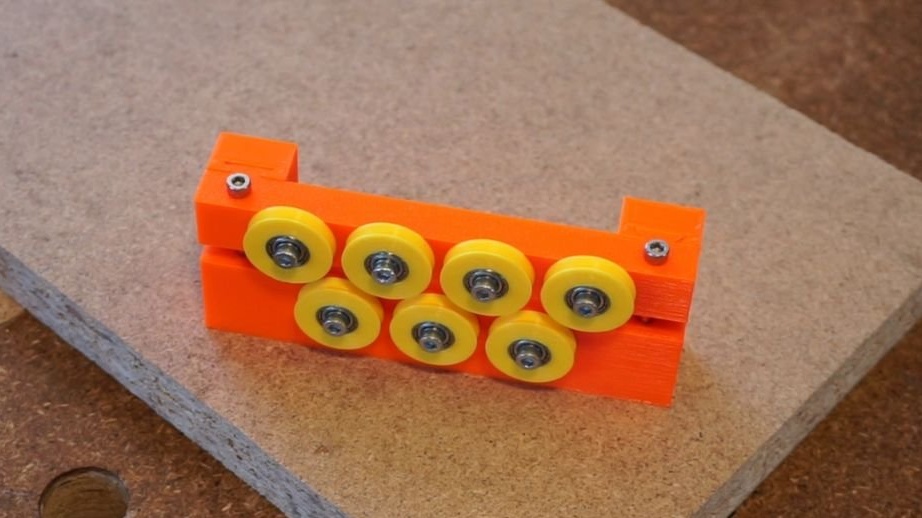
Le fil est généralement fourni sous forme de bobine. Pour plier le fil, vous devez d'abord le redresser. Le redresseur se compose de 7 rouleaux (4 en haut et 3 en bas), qui peuvent être pressés les uns contre les autres pour assurer la bonne tension du fil. Il empêche également la torsion du fil pendant le pliage.
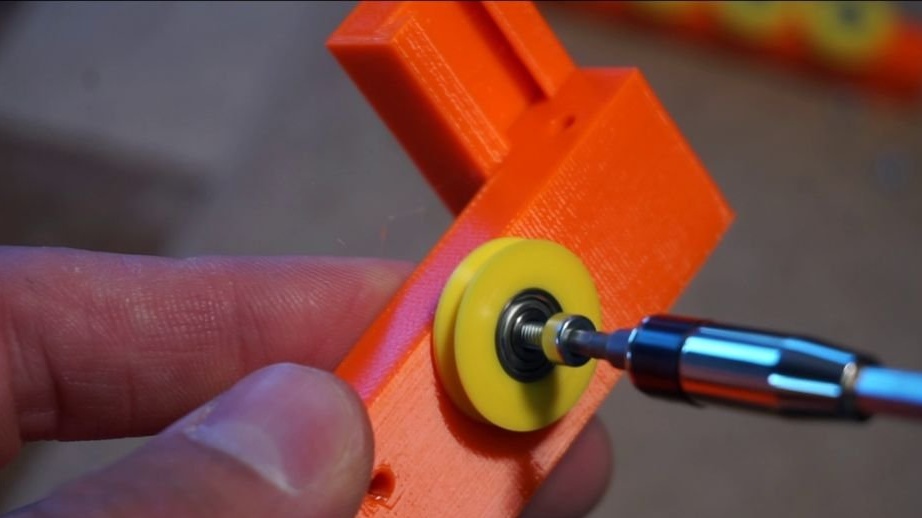
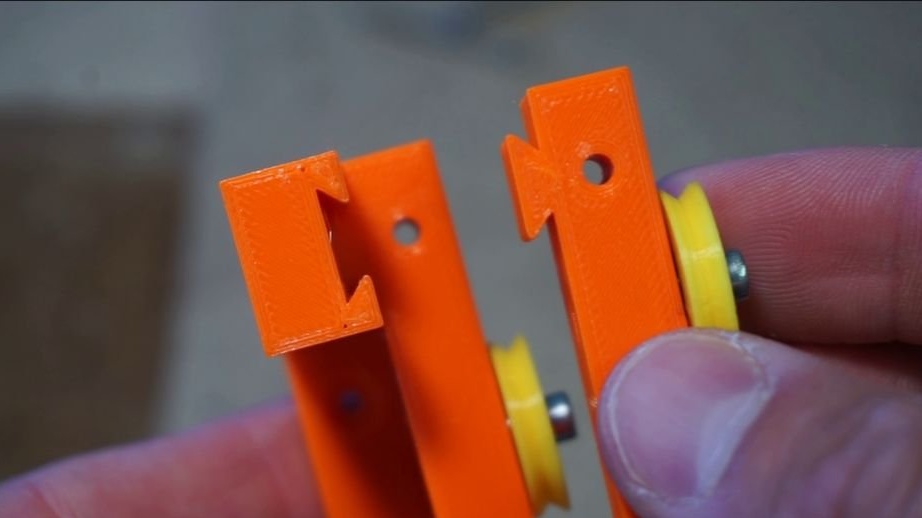
Démarrez l'assemblage avec les roulettes. Vous devez d'abord enfoncer le roulement de 3x10x4 mm dans le logement de rouleau en plastique. Insérez le boulon M3x12 d'un côté et la rondelle M3 de l'autre côté du rouleau. La rondelle empêchera le frottement de la roue sur le cadre. Vissez tous les rouleaux sur le cadre inférieur et supérieur. Connectez les deux cadres. Fixez les cadres avec deux boulons M3x40.
Vous pouvez économiser de l'argent sur les roulements à rouleaux. Imprimez la pièce Straightener_RollerNoBearing au lieu de Straightener_Roller. Mais les performances seront un peu moins bonnes.
Pour des résultats encore meilleurs, utilisez 2 lisseurs d'affilée.




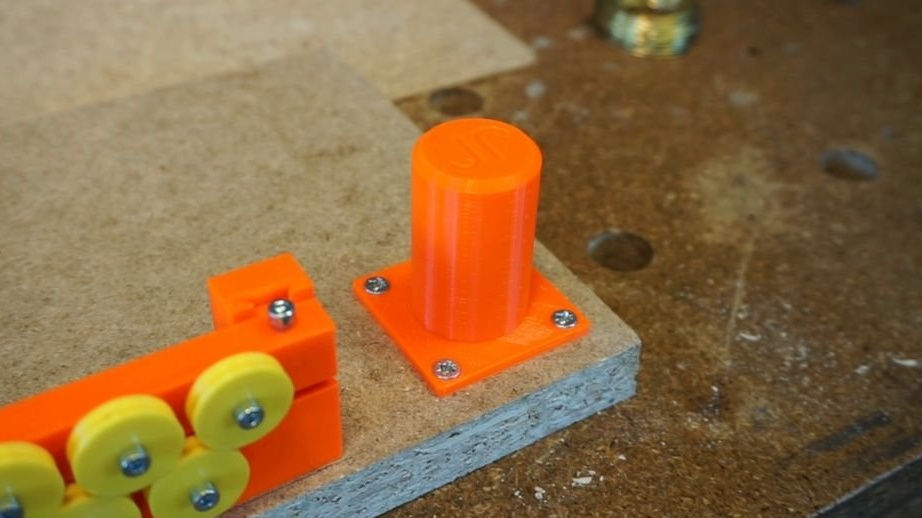
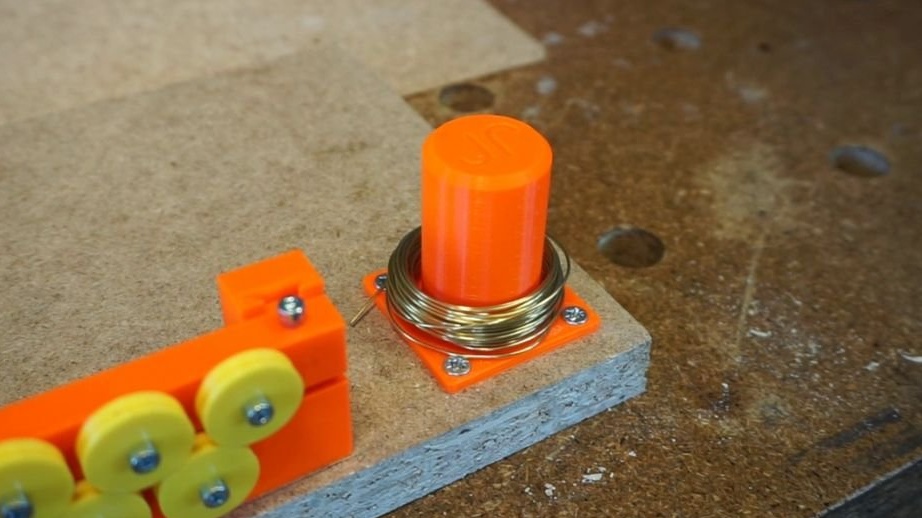
Étape six: Support de bobine
Le porte-bobine est un simple cylindre qui retient le fil et lui permet de se dérouler de la bobine. Vissez-le à la base avec quatre vis 3x16.
Étape sept: se connecter
Tout d'abord, le fil de pliage doit être acheminé vers la machine. Le maître utilise un fil de laiton de 0,8-1 mm en forme de bobine.
Le fil passe de la bobine aux rouleaux. Collez simplement le fil entre les rouleaux. Elle passe ensuite par la broche.Ajustez la position du mécanisme d'alimentation de sorte que la gouttière affleure la surface du guide-fil. Appuyez sur le levier de l'engrenage intermédiaire et poussez le fil à travers le chargeur jusqu'à la plaque de pliage. Relâchez le levier et laissez-le appuyer contre le mécanisme d'alimentation. Vous pouvez maintenant faire défiler le mécanisme d'alimentation manuellement pour pousser le fil vers la tête de pliage. Ajustez soigneusement la tension sur les rouleaux en serrant les boulons. Les rouleaux ne doivent pas tourner librement, mais le fil doit se déplacer en douceur.
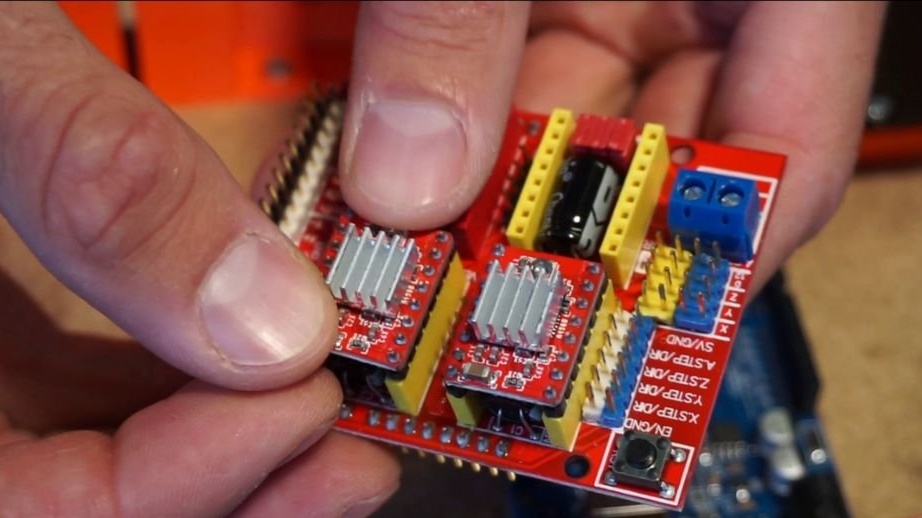
Deuxièmement électronique Le contrôleur doit également être connecté. Le maître utilise l'Arduino UNO classique avec CNC et deux pilotes de moteur pas à pas A4988. Le moteur d'alimentation est connecté à l'axe Z et le moteur de la tête de flexion à l'axe X. Les pilotes sont configurés pour la plus grande précision possible - les 3 cavaliers sous les pilotes pas à pas sont insérés. Tout doit être connecté à une alimentation 12V 3A.

Étape huit: Firmware
Vous pouvez maintenant essayer de démarrer la machine. Master utilise GRBL avec cncjs. Ils sont conçus pour fonctionner sur une fraiseuse, mais fonctionnent très bien pour tout type de CNC. GRBL est le firmware dont vous avez besoin pour installer dans Arduino UNO. Il existe un bon client Web cncjs pour définir les paramètres. Installez GRBL sur Arduino et cncjs sur votre ordinateur.
Après l'installation, vous devez vous connecter à la machine et vérifier son fonctionnement en appuyant sur les boutons Z +/- ou X +/-.
Vous devez maintenant calibrer: 10 mm = Z10 102 $ = 34 110 $ = 1600 111 $ = 600 112 $ = 1000 120 $ = 500 121 $ = 350 122 $ = 350
Il s'agit d'un ensemble de valeurs qui déterminent comment convertir le nombre indiqué dans le code en mouvement moteur. Par exemple, si vous définissez l'axe Z sur 30, cela signifie en fait qu'il poussera 30 mm de fil à travers le chargeur.
Nous avons compris l'étalonnage, vous devez maintenant régler la tête de pliage sur la position zéro.
Le mouvement de la tête de cintrage est déterminé par la position fixe bien connue de la tête de cintrage. Dans ce cas, c'est la position dans laquelle la goupille de flexion sur la tête est tournée vers la gauche. Voir la photo.
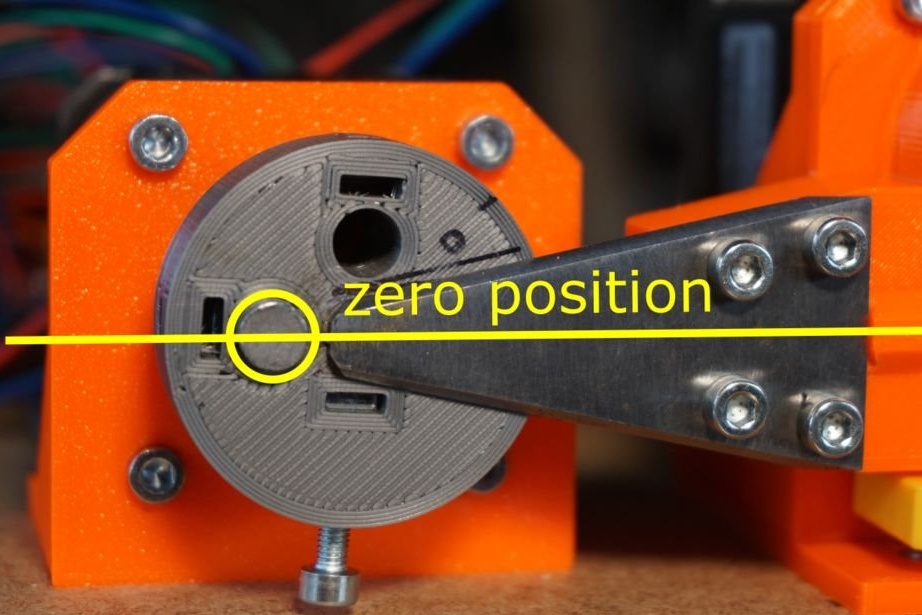
Il est conseillé de noter cette position zéro sur la tête afin de pouvoir la remettre dans la même position. Il n'est pas nécessaire que le mécanisme d'avance détermine la position zéro, car il se déplace toujours par rapport à la position actuelle.
Voyons maintenant un exemple de Gcode. Cela ressemble à ceci:
G91
G1 Z1
G90
G1 X2
G1 X-6Et voici pourquoi chaque valeur est écrite:
G91 - utilisez des coordonnées relatives (requises avant tout mouvement le long de l'axe Z)
G1 Z1 - alimentation fil 1 mm
G90 - utilisez des coordonnées absolues (requises avant tout mouvement le long de l'axe X)
G1 X2 - tournez la tête de cintrage en position 2 (ce nombre n'a pas d'unités)
G1 X-6 - tournez la tête de cintrage en position -6
Si vous répétez les étapes 100 fois, vous obtiendrez un code de ressort. Plus de fichiers source peuvent être trouvés ci-dessous.
hex-inner.gcode
hex-external.gcode
spring.gcode
La machine est prête. Mais le maître travaillera toujours à l'améliorer.
L'ensemble du processus de fabrication d'une telle machine peut être vu dans la vidéo.