Le capitaine a assemblé cette fraiseuse principalement à partir du matériel dont il disposait.
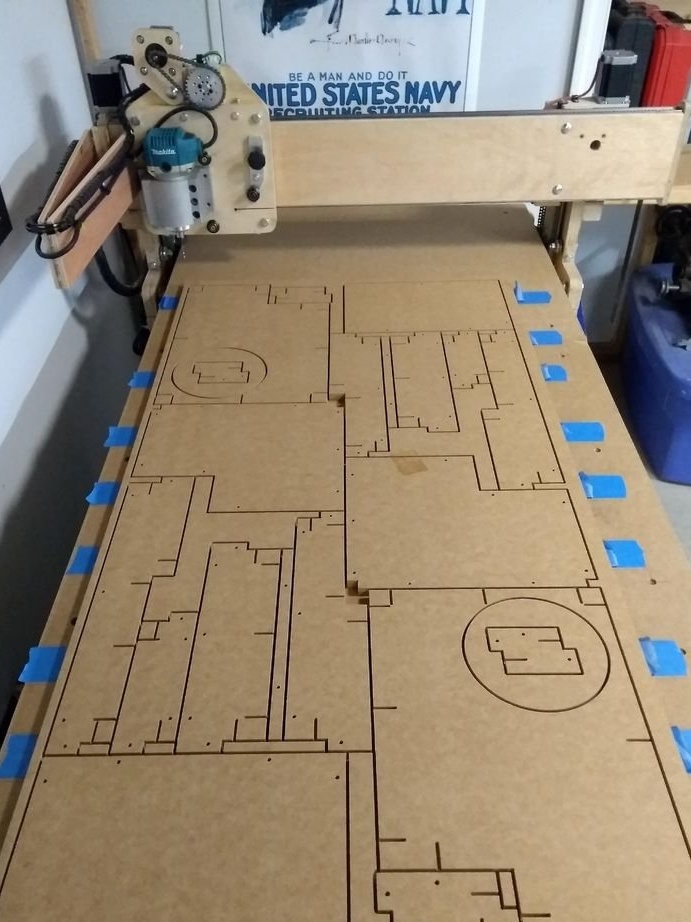
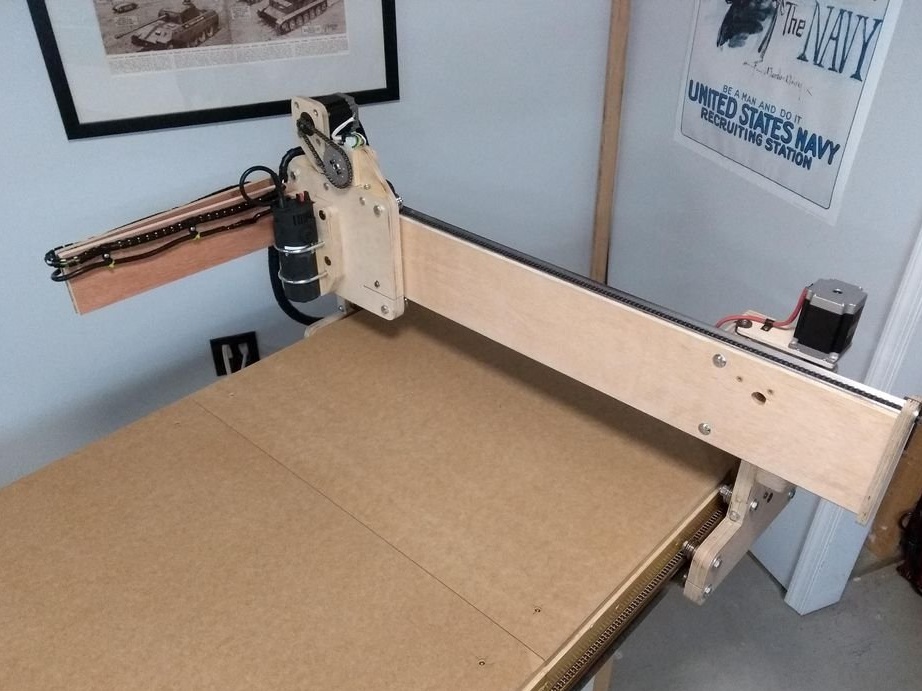
Il s'agit d'une fraiseuse à trois axes classique. Il a un portail qui se déplace le long de la base (axe Y). Il y a un chariot sur lequel le routeur est monté et il se déplace d'avant en arrière (axe X). Et il existe un mécanisme qui soulève et abaisse le routeur de haut en bas (axe Z). Pour le mouvement, le maître utilise des moteurs pas à pas et des chaînes. Pour les rails linéaires, des roulements en V en acier sont utilisés qui s'étendent sur un coin en acier. L'assistant ne donne pas d'instructions détaillées, seulement le concept général et les idées.
Outils et matériaux:
- Table de chevet;
-Porte;
-Rollers;
-Coin métallique;
-Contreplaqué;
-Fixations;
-Drill;
Fraise;
-Saw;
-Fil;
-Chaîne;
-Tige filetée;
-Moteurs pas à pas;
-Étoiles;
-Roulements;
-Adaptateur pour aspirateur;
-Arduino;
- Contrôleur Estlcam;
-Relais à semi-conducteurs;
-Alimentation électrique;
- Pilotes pas à pas;
Première étape: la table
Le maître refit la table de l'ancienne table de chevet. Comme plan de travail, le maître a cloué une porte en bois sur la table. Ci-dessous ont été installés des rouleaux.



Deuxième étape: Rails
Le maître utilise un coin métallique comme guide. Sur le flan de contreplaqué, le maître fixe quatre roulements avec une rainure. Il est clair que le coin est fixé des deux côtés de la table.




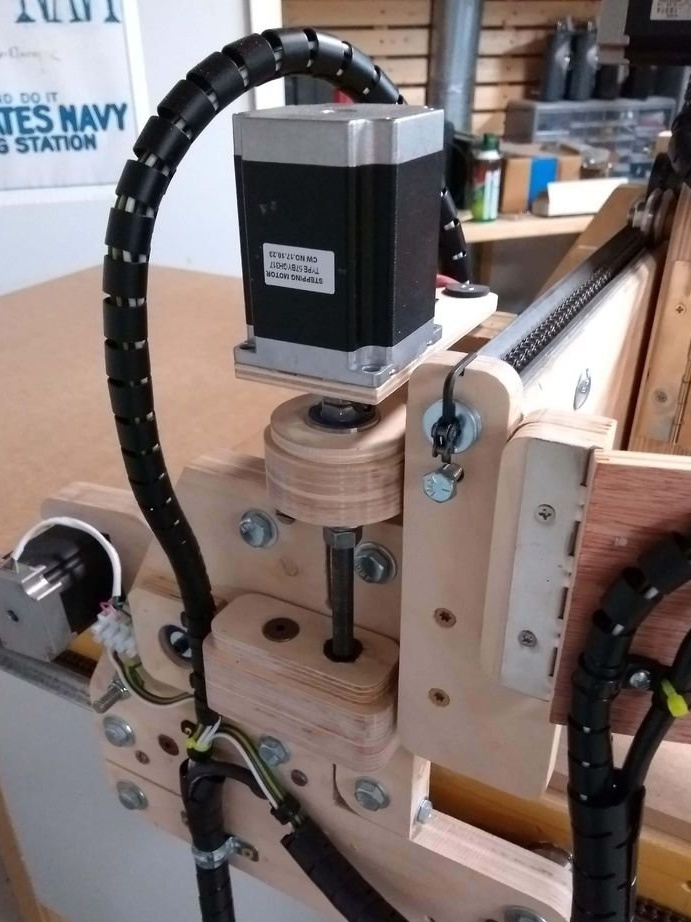
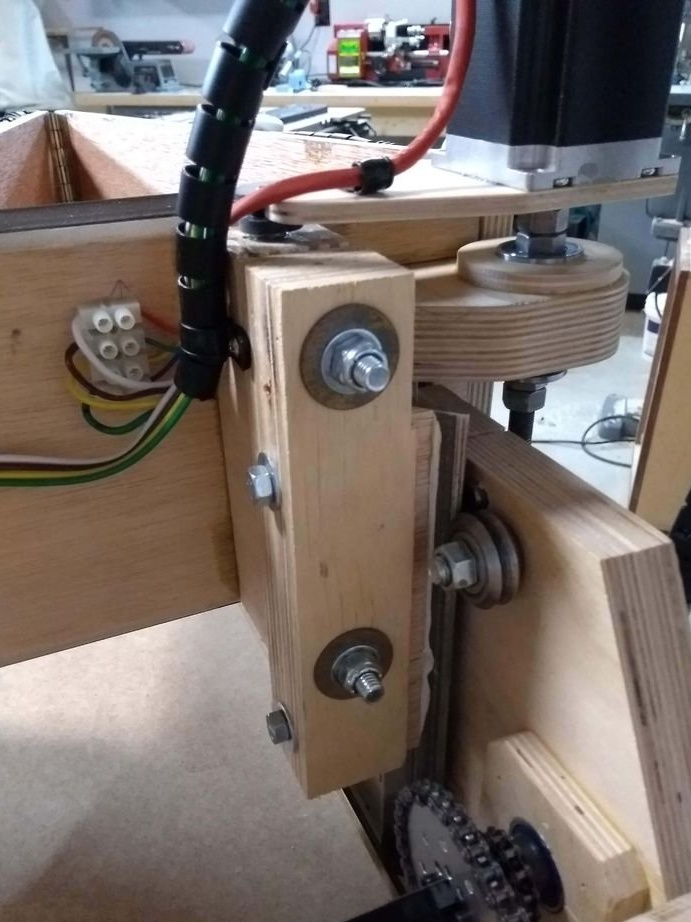
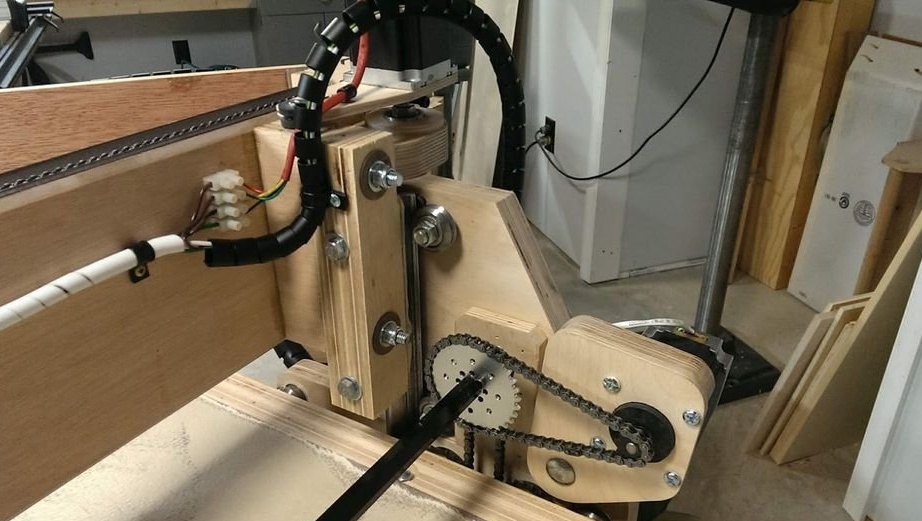
Troisième étape: portail
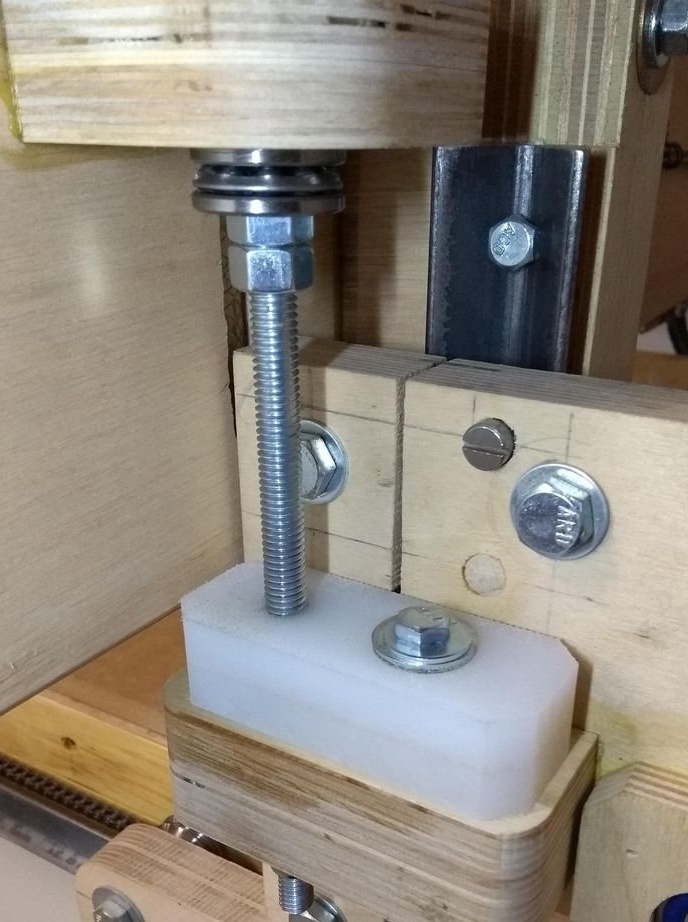
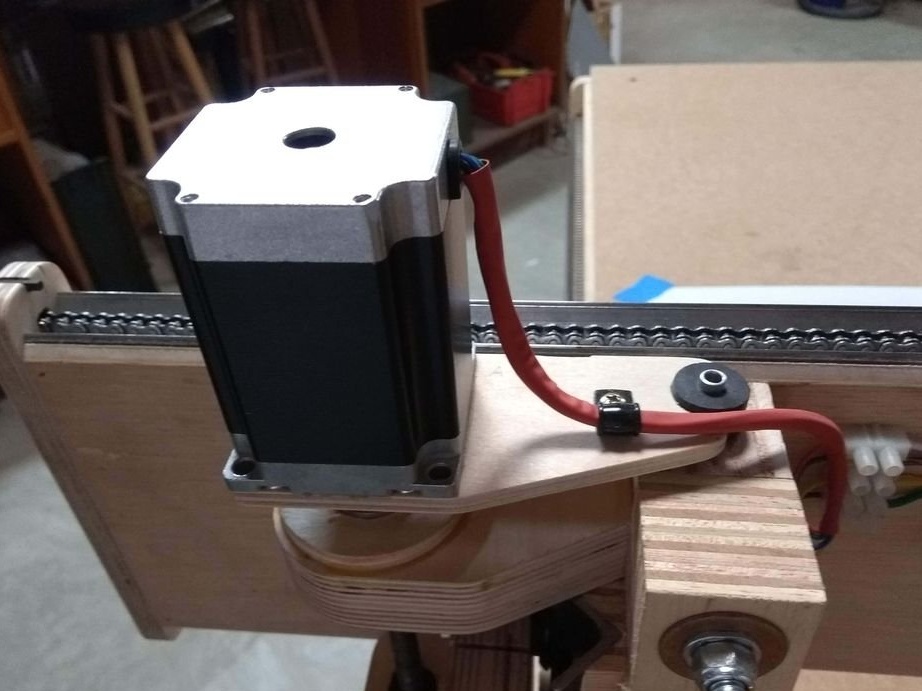
Le portail est construit en deux couches de contreplaqué collées ensemble. Une fraise est montée sur le détail transversal du portail. La partie transversale, conjointement avec la fraise, monte / descend le long des mêmes rails qu'à l'étape précédente. Deux moteurs pas à pas sont installés pour se déplacer le long des bords. Le capitaine a fixé de longs boulons aux axes des moteurs. En bas, il y a un nœud avec des noix. Sur commande, les moteurs commencent à fonctionner, les arbres tournent et la fraise s'abaisse ou monte.
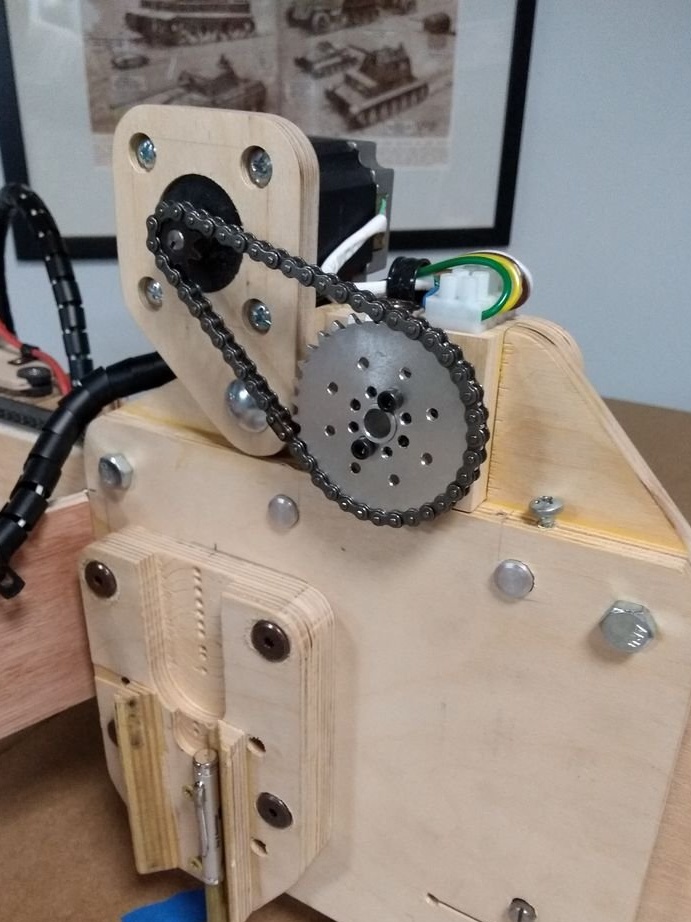
Pour déplacer le chariot avec le broyeur sur l'axe Z, le maître utilise un moteur pas à pas et un engrenage à chaîne.





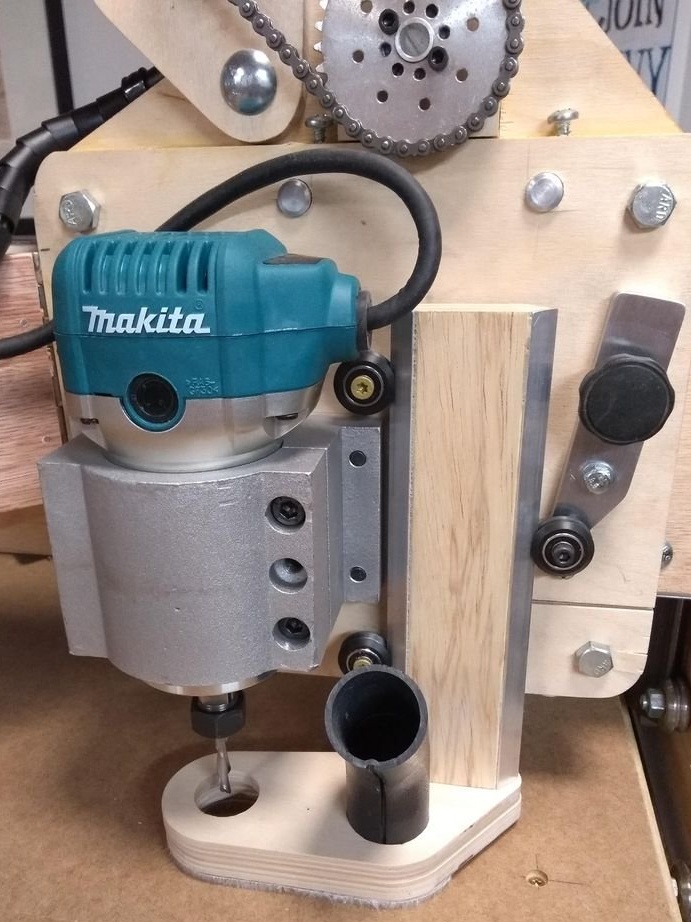
Quatrième étape: fraise
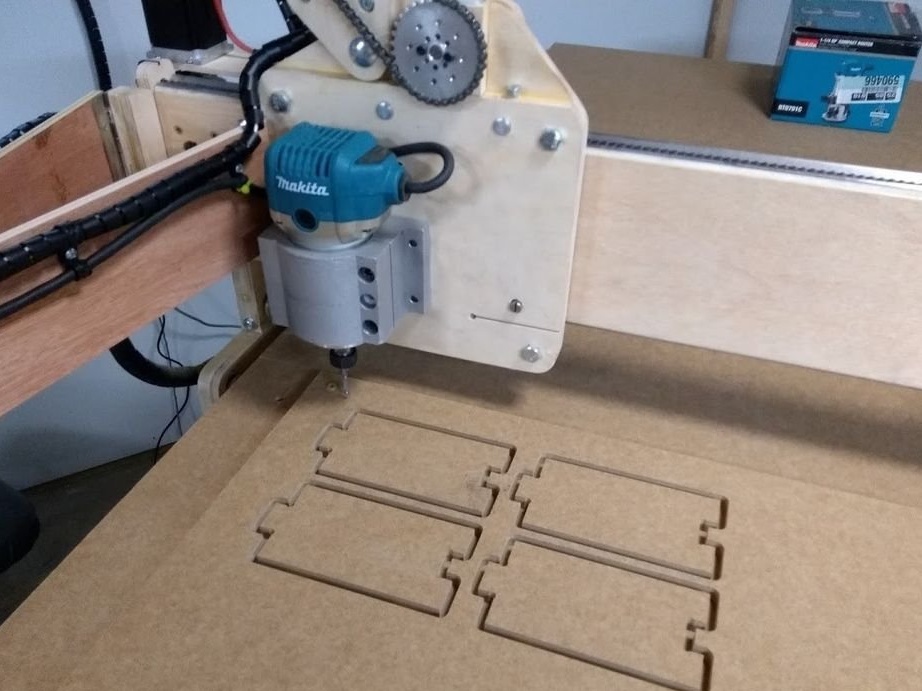
Un routeur Makita RT0701C est installé sur la machine. De plus, le maître installe un adaptateur pour connecter les tuyaux de l'aspirateur.



Cinquième étape: la gestion
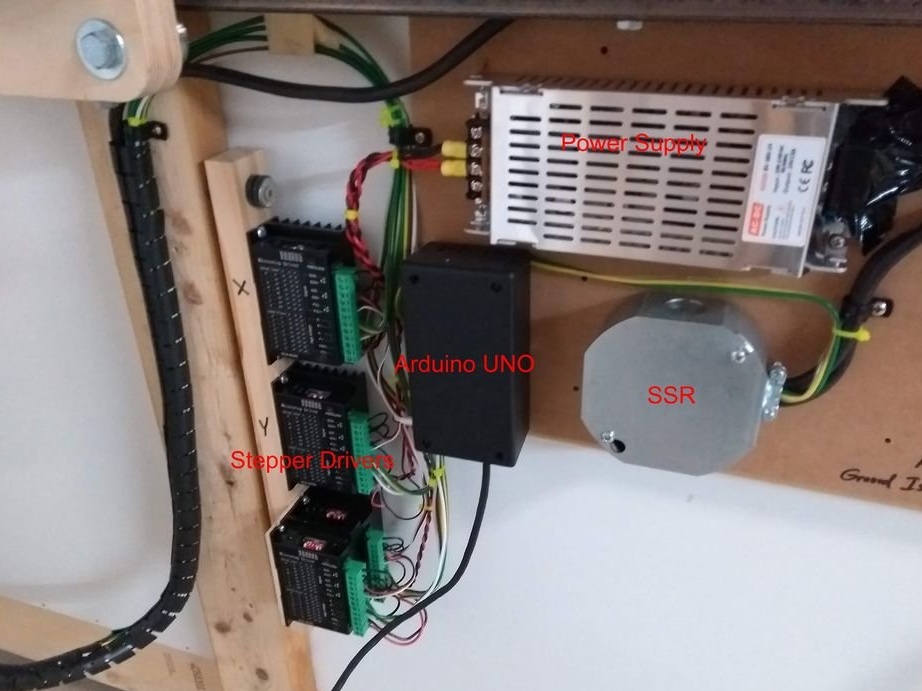
Système de gestion basé sur Arduino UNO et un petit PC avec le logiciel CNC EstlCAM.
L'Arduino Uno est monté à l'arrière de la machine et prend en charge le logiciel du contrôleur Estlcam. Le boîtier électrique contient un SSR 10A (relais à semi-conducteurs), qui allume et éteint le routeur. Sur la gauche se trouvent des pilotes de pas TB6600 et une alimentation 24 V, 15 A. Les fils des moteurs passent à travers l'ondulation. Un PC Windows 10 affiche l'image sur le moniteur et est contrôlé par une souris et un clavier sans fil.
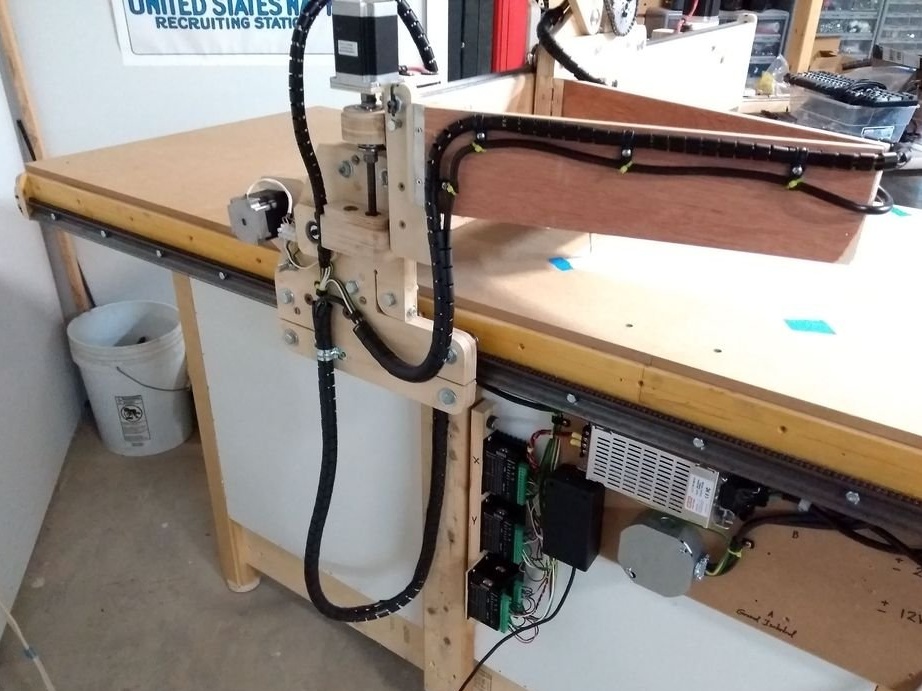

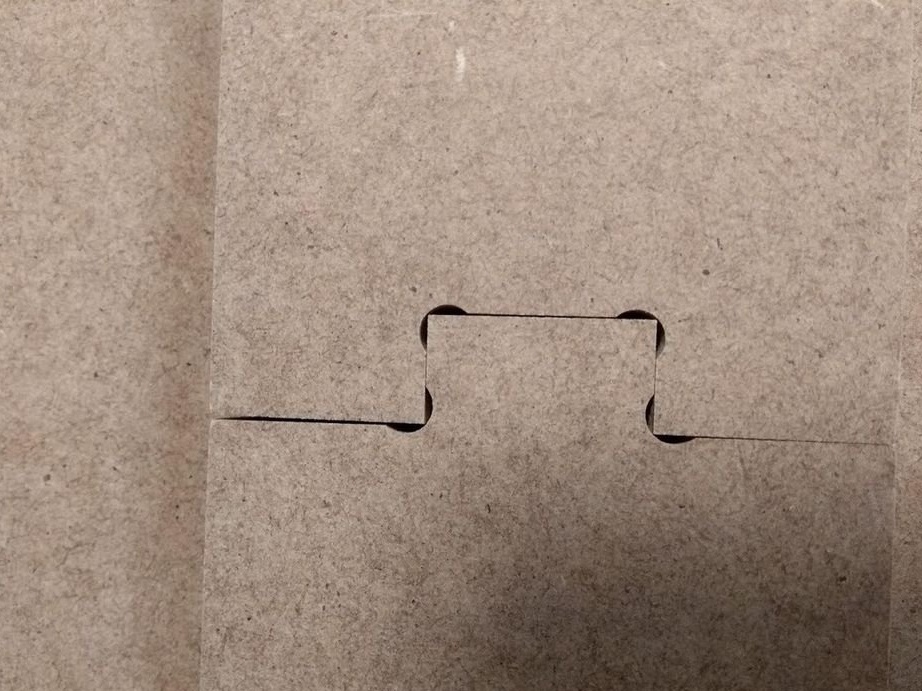
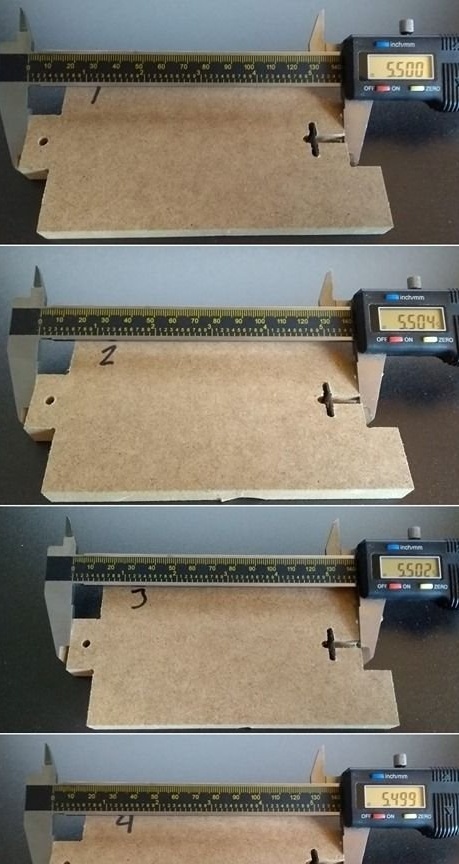
Selon le maître, la machine s'est avérée tout à fait normale, la dernière photo montre des exemples de fonctionnement de la machine.