

Faire un tel robot de vos propres mains ne sera pas du tout difficile et même intéressant. Le résultat est un appareil très intéressant qui se comportera comme une créature vivante. Tout cela grâce à deux petits moteurs, ce sont eux qui entraînent le robot. En modifiant l'angle d'attaque des arbres moteurs, vous pouvez rendre le robot plus rapide ou plus lent. Vous pouvez également expérimenter avec différents embouts pouvant être portés sur l'arbre du moteur.
Matériaux et outils:
- deux petits moteurs (3 Volts, peuvent être trouvés dans les jouets pour enfants);
- support pour piles (vous pouvez le faire vous-même ou le retirer de l'ancienne télécommande, lampe de poche, etc.);
- deux commutateurs de type SPDT (ils peuvent être obtenus à partir d'une vieille souris d'ordinateur);
- deux petits et un grand trombone;
- une petite roue du jouet;
- câblage fin

Processus de fabrication:
Première étape. Câblage à souder
Tout d'abord, vous devez préparer les fils et les souder à tous les composants électroniques, afin que plus tard, il soit pratique de connecter les nœuds. Les fils doivent être coupés à une longueur de 6 cm et retirés de leurs extrémités d'environ 1 cm. Vous devez maintenant souder deux fils aux moteurs et aux interrupteurs. N'oubliez pas non plus de souder les deux fils aux contacts du support de batterie. Les autres extrémités des fils sont de préférence étamées.

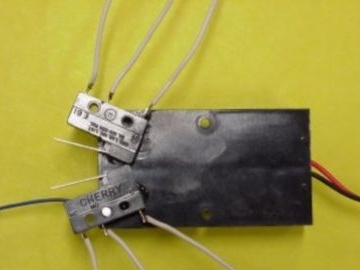
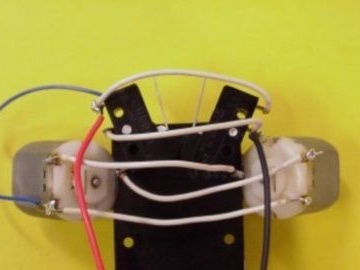
Deuxième étape Réglage des commutateurs
Pour régler les interrupteurs, le support de batterie doit être retourné. Maintenant, vous devez coller les commutateurs avec de la colle sur le support de batterie. En conséquence, la lettre V devrait se former.
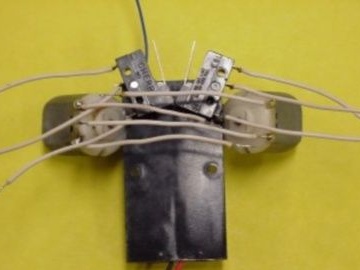
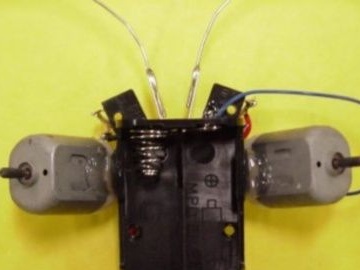
Troisième étape Installation du moteur
Les moteurs doivent être attachés au support de batterie à un angle, comme indiqué sur l'image. Les angles des deux côtés doivent être les mêmes, sinon le robot ne fonctionnera pas correctement. Les arbres moteurs doivent reposer contre la route. Les moteurs peuvent être montés avec de la colle.

Quatrième étape Installation de la roue stabilisatrice
Le stabilisateur est nécessaire pour fait maison se tenait à plat sur la route. Pour fabriquer une roue, vous pouvez utiliser un rouleau d'un magnétophone ou une roue d'un jouet pour enfants. Quant à la «fiche», elle est constituée d'un long trombone ou d'une ficelle.En conclusion, le stabilisateur adhère uniformément au support de batterie.

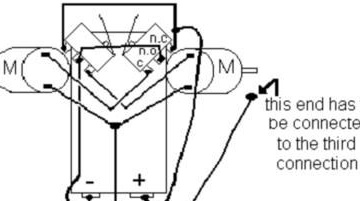
Cinquième étape Connexion de câblage
Pour que le robot fonctionne correctement, tous les fils doivent être connectés clairement selon le schéma. Le circuit est visible sur la photo.

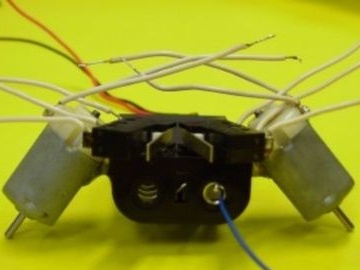
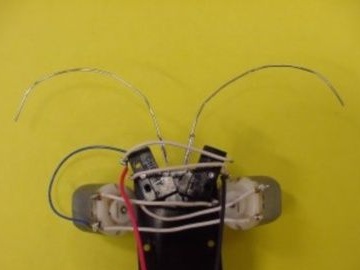
Étape six Faire une moustache pour le bug
La moustache servira de roue pour le scarabée, dès qu'un obstacle se rencontrera sur son chemin, la moustache activera les interrupteurs, puis les moteurs feront tourner le robot dans une direction différente. Lorsque l'interrupteur est activé, l'un des moteurs s'arrête et une sorte de différentiel se déclenche. Si les deux interrupteurs sont activés, le robot s'arrête complètement. La moustache est faite de petits trombones, ils doivent être soigneusement collés aux boutons des interrupteurs.

Septième étape. Révision finale et test du robot
Au stade final, des embouts en caoutchouc doivent être installés sur les arbres du moteur, ils sont nécessaires pour une meilleure adhérence. Ils peuvent être fabriqués à partir de cambric.
C'est tout, le robot est prêt. Vous devez l'exécuter sur une surface lisse, par exemple, sur une table ou un linoléum. Comme les pattes du scarabée sont trop petites, il ne rampera pas le long du tapis, pour cela il faudra augmenter les pointes sur les arbres du moteur.
À l'avenir, le robot pourra être mis à niveau à sa discrétion. Par exemple, il peut fabriquer des yeux LED qui s'allumeront au contact d'un obstacle.