
Cet article est basé sur les idées du siècle dernier, l'auteur a essayé de le répéter en utilisant des aimants en néodyme. Le fait est que vous n'avez pas besoin d'un puissant générateur d'électricité et, par conséquent, du même lecteur pour cela. Vous pouvez utiliser un variateur et plusieurs générateurs moins puissants fonctionnant sur la même charge, connectés entre eux dans ce cas particulier, via un engrenage magnétique.
J'ai vu une boîte de vitesses magnétique basée sur ce principe. Il y avait quelques brevets sur Internet.
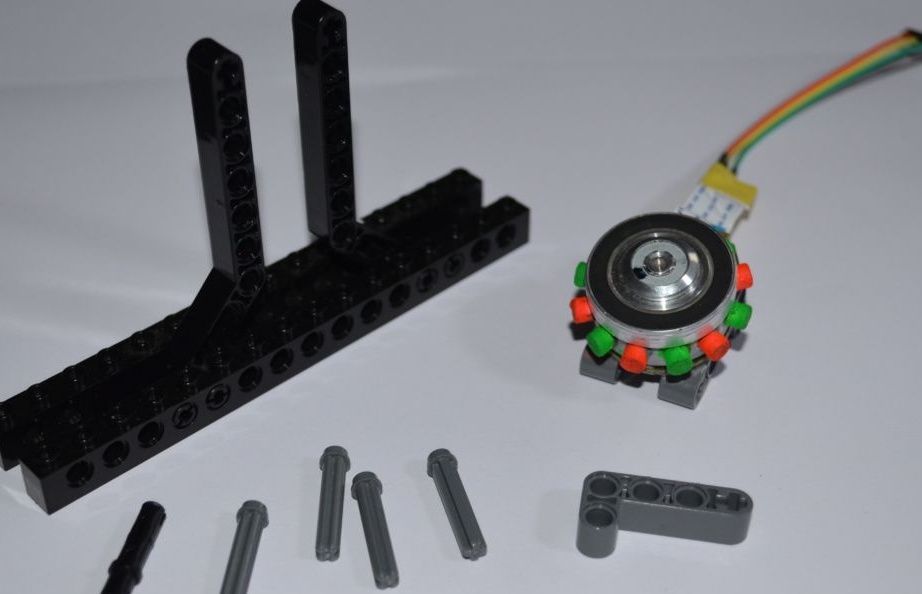
Ce dont vous avez besoin pour un prototype:
- moteurs de lecteurs CD / DVD 5 pcs.
- Aimants néodyme 5 mm de diamètre et 4 mm de hauteur 60 pièces
-Conseil
- ponts à diodes 200v 2A 15 pcs.
- LEDs rouge, jaune, vert 5mm pour 15 pièces. tous
- résistances 150 Ohms 0,125 W 15 pcs.
fil
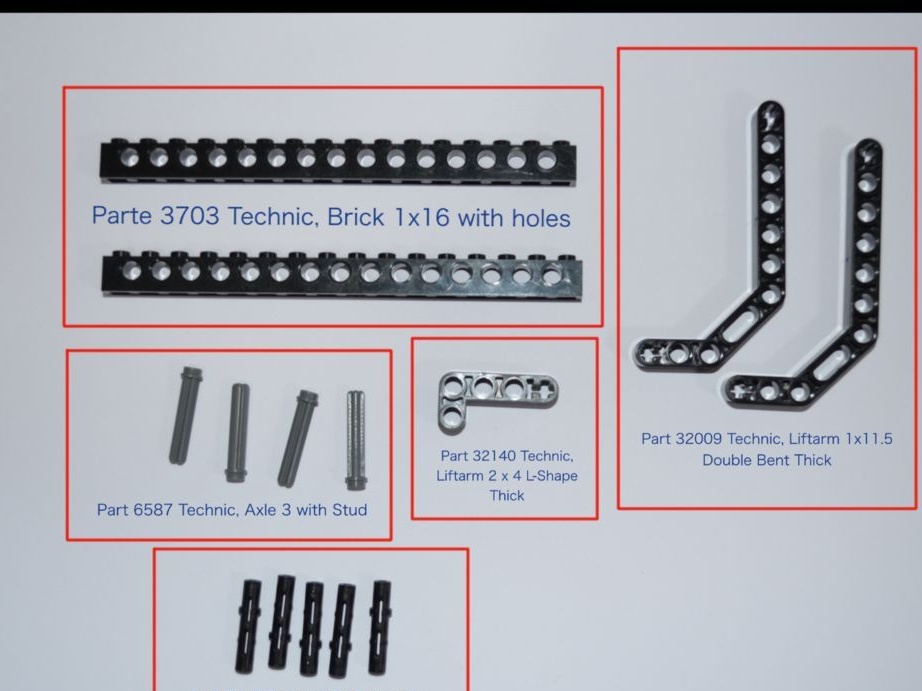
Lego:
• Brique 1x16 (LEGO n ° 3703) - (10 pièces)
• Bras de levage 1x11,5 (LEGO n ° 32009) - (10 pièces)
• Bras de levage 2x4 L (LEGO n ° 32140) - (15 pièces)
• Essieu 3 avec goujon (LEGO n ° 6587) - (20 pièces)
• Épingle longue avec friction (LEGO n ° 6558) - (25 pièces)
Colle, thermorétractable d'un diamètre de 1,5 mm, peinture fluorescente orange et verte








MOTEURS DE MONTAGE
Les moteurs utilisés dans cette conception sont sans balais (soupape), pour plus de détails à leur sujet peuvent être lus
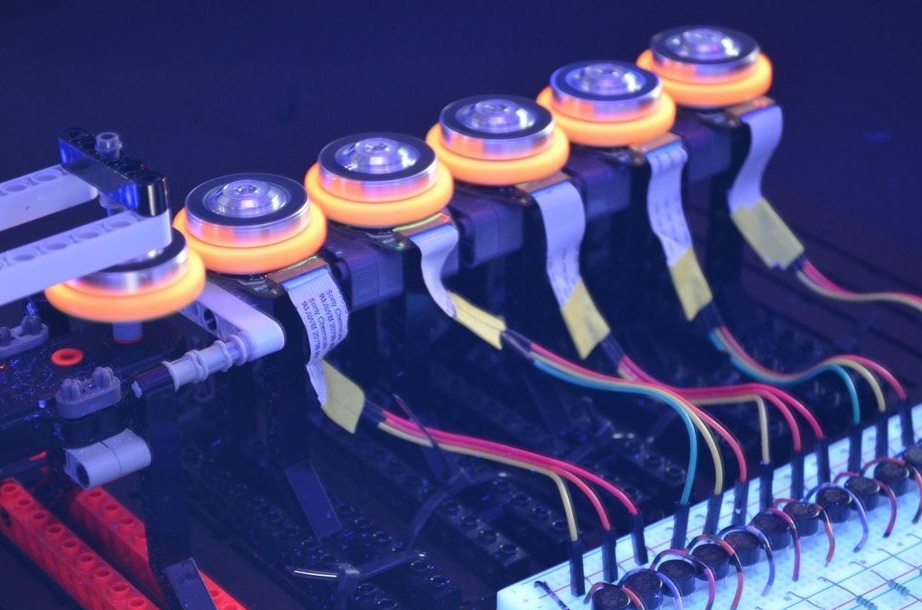
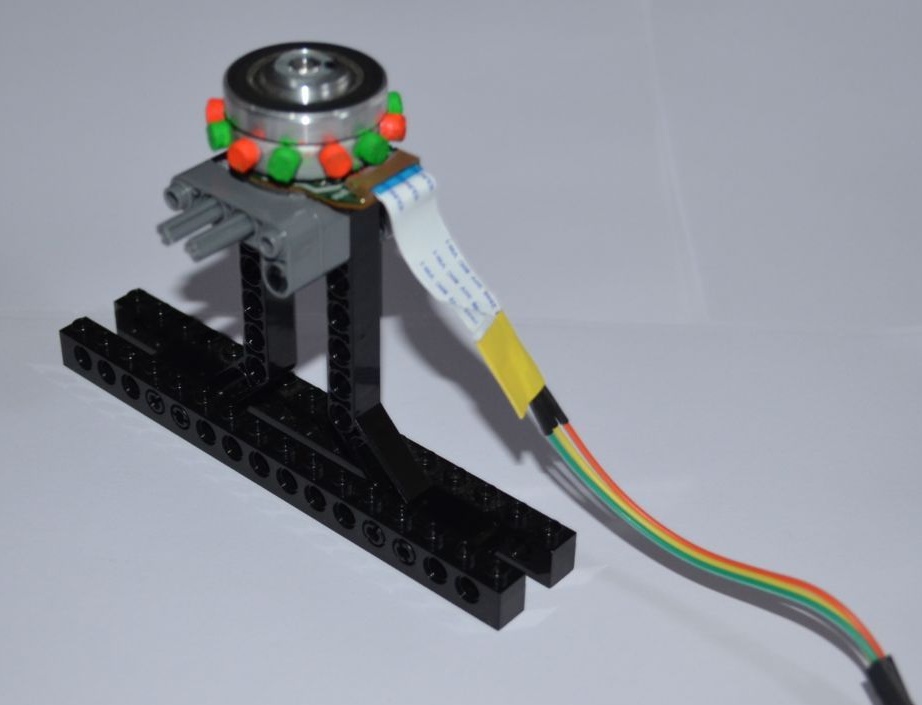
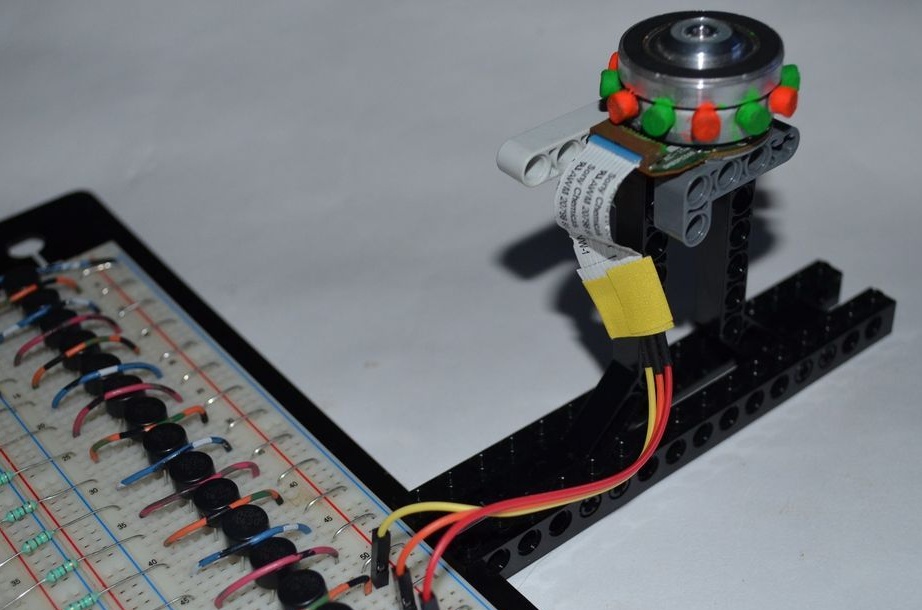
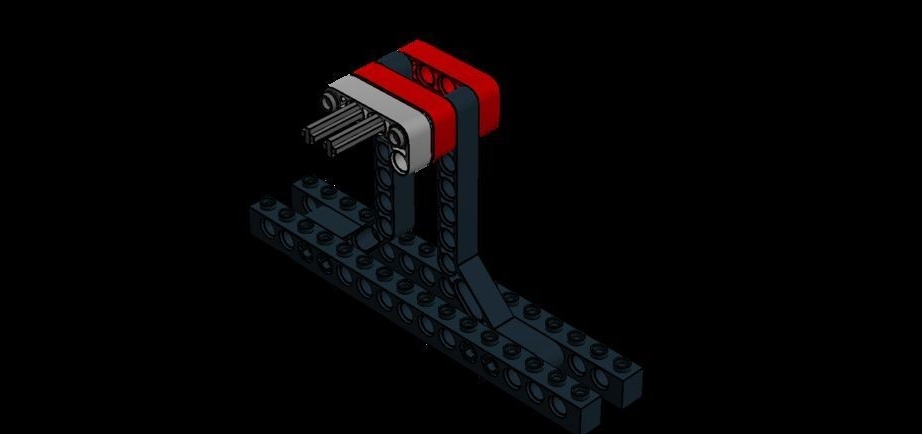
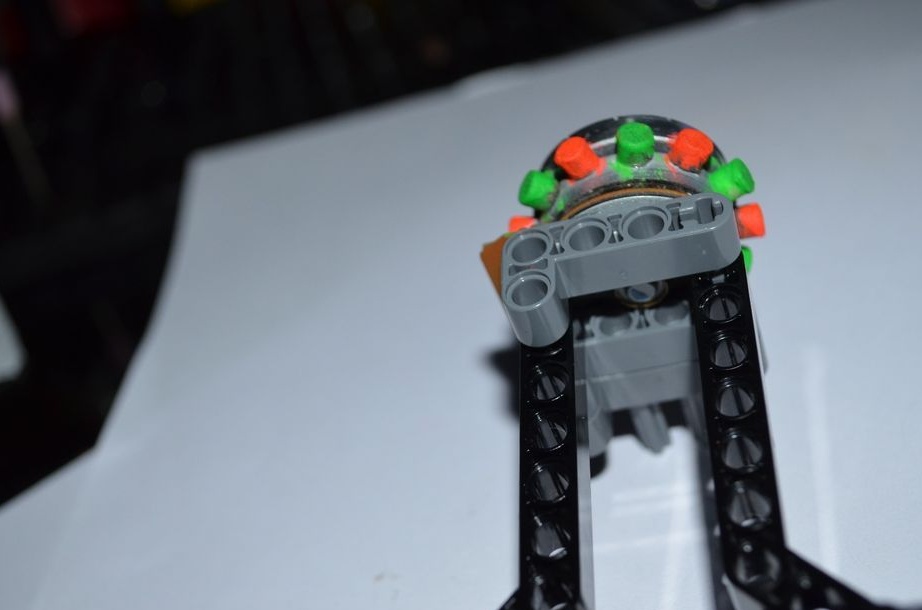
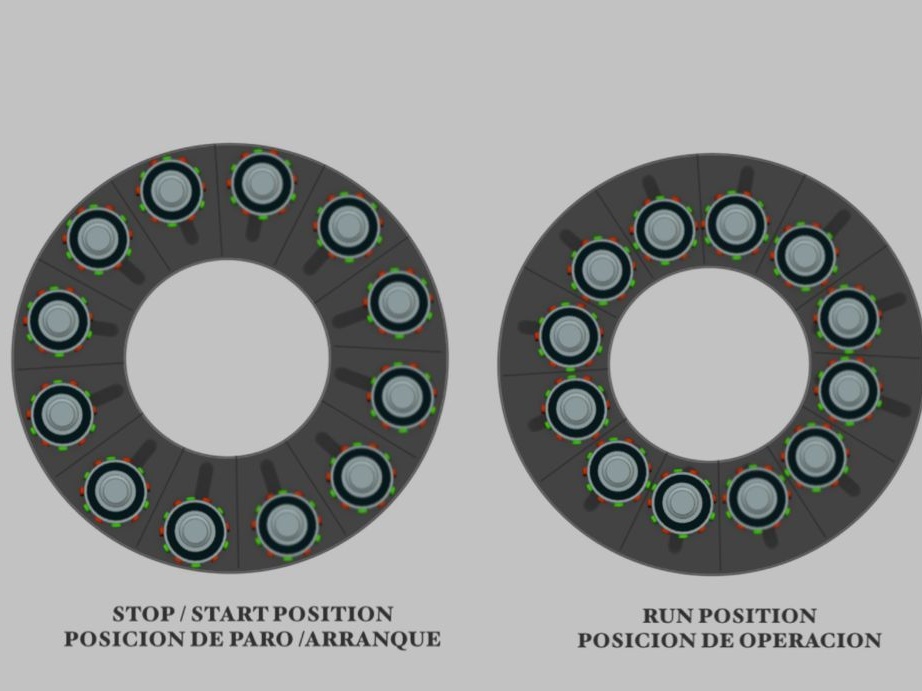
L'installation des moteurs est effectuée sur des pièces de LEGO comme indiqué sur la photo,



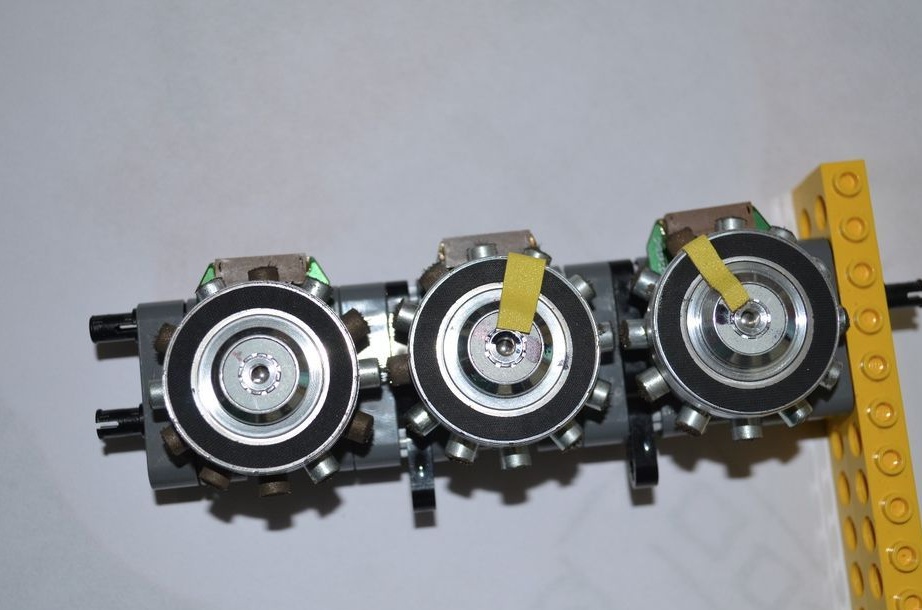
Utilisation de colle cyanoacrylique. Je ne veux pas que LEGO vienne avec votre propre support. Placez ensuite des aimants sur le moteur afin que leurs pôles alternent S-N-S-N-S. L'auteur n'écrit pas à ce sujet, mais il est probablement préférable de décrire à l'avance la disposition des aimants dans certains programmes.
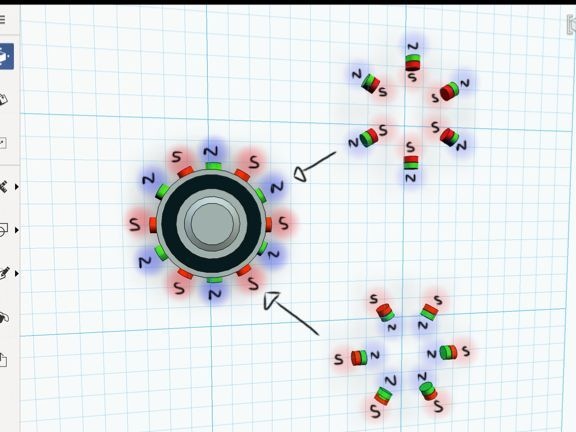
Mais gardez à l'esprit que les aimants sont puissants et très fragiles, s'ils sont attirés à longue distance, ils se fissureront simplement. Cela m'est arrivé. À partir d'environ 20 cm, les aimants se sont effondrés et l'un d'eux s'est tout simplement effondré. En raison des vitesses de rotation élevées, les aimants doivent être collés aux moteurs, sinon ils voleront simplement dans la pièce. Après l'autocollant, peignez chaque aimant de différentes couleurs pour mieux voir l'œuvre.
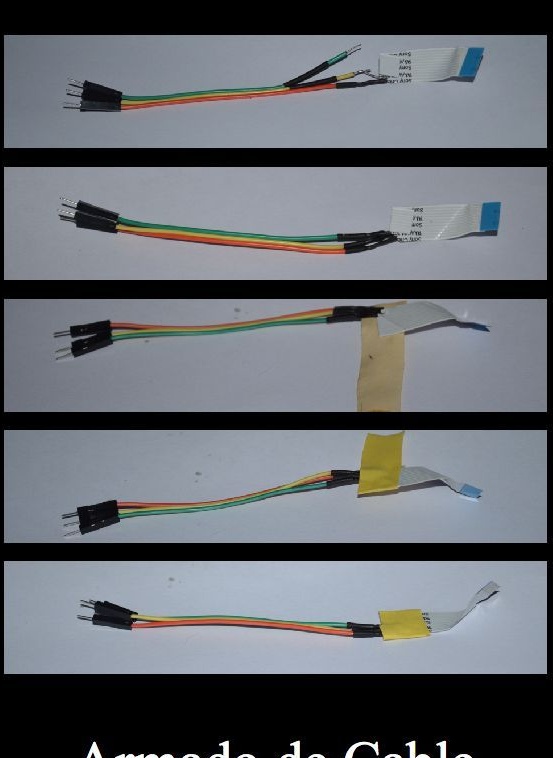
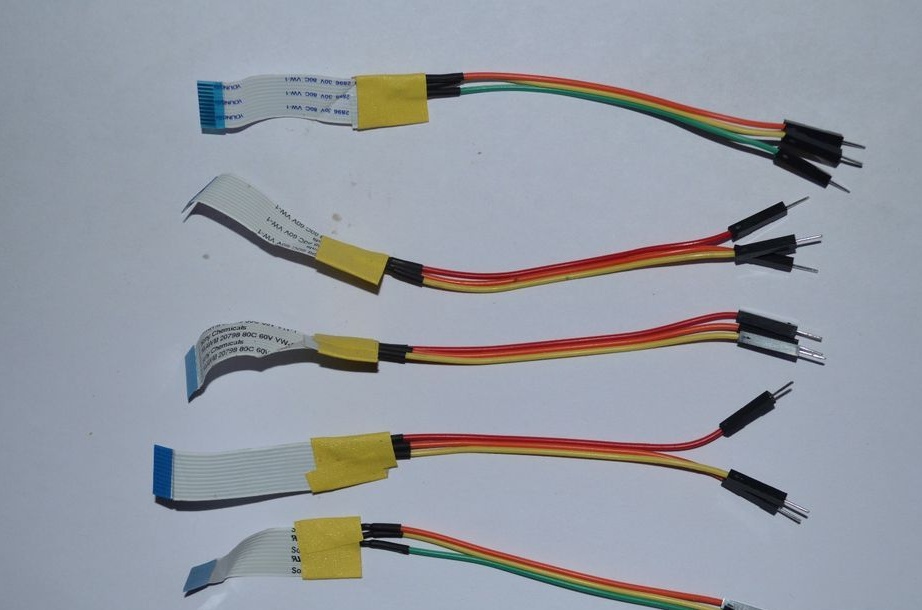
Connexion des moteurs.
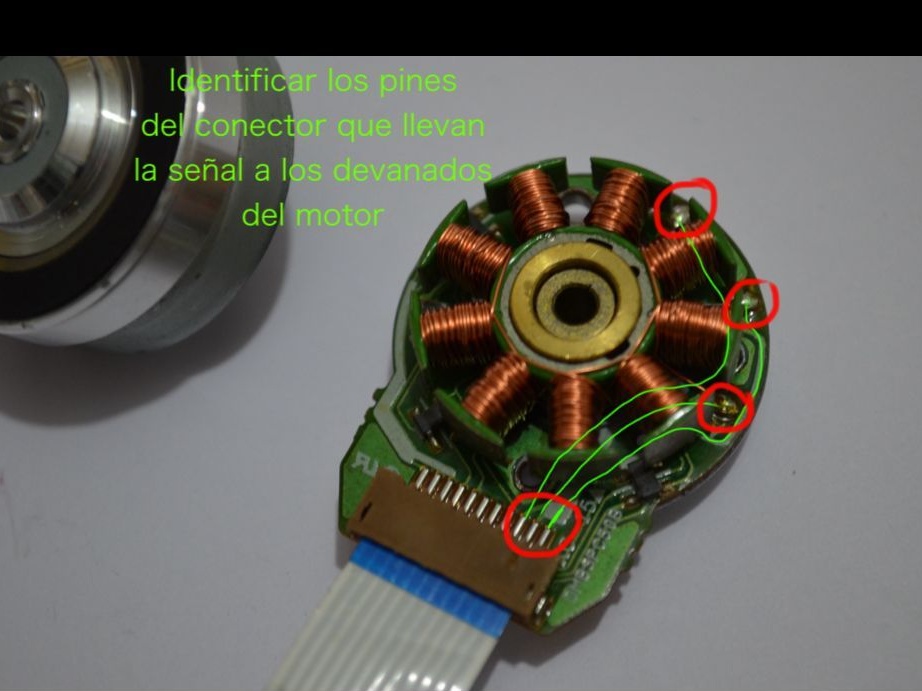
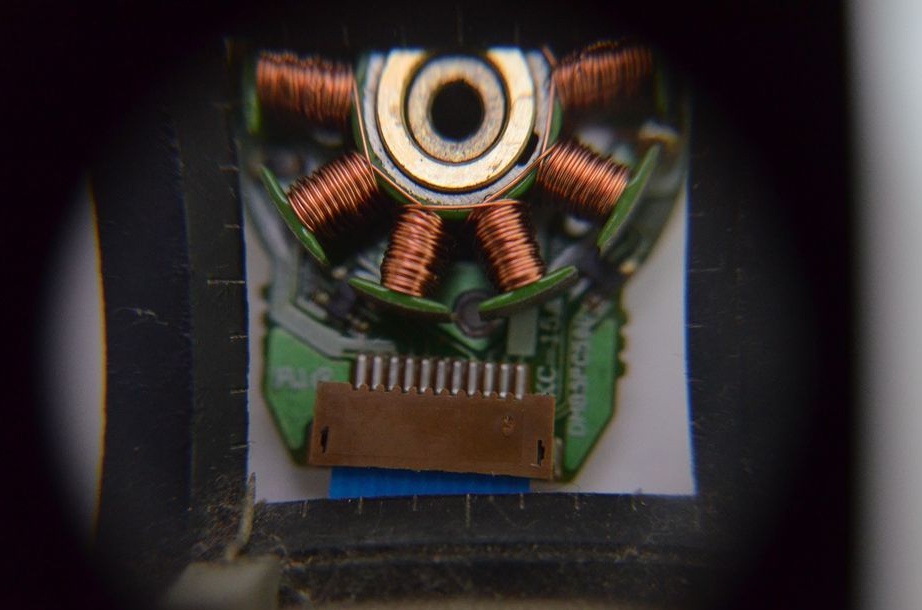
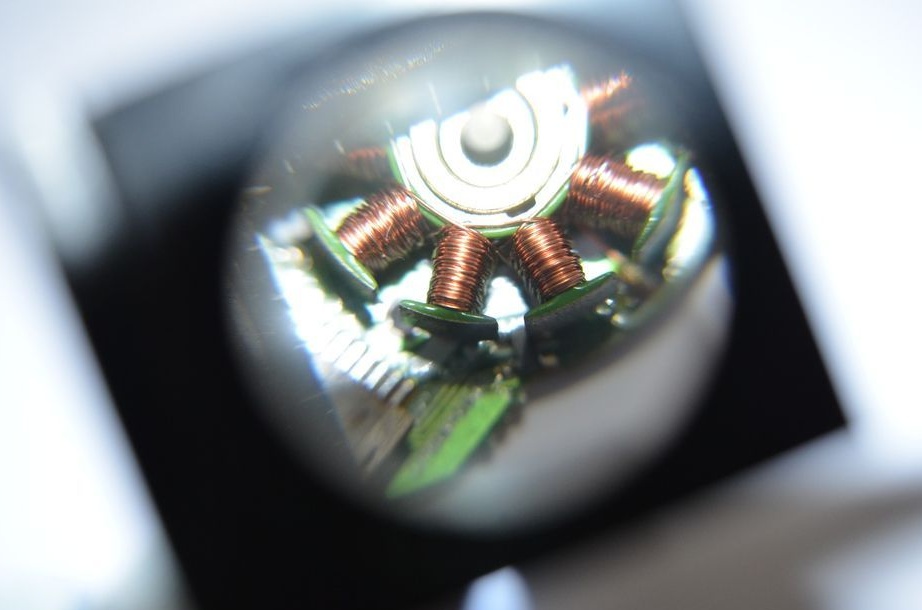
Chacun des moteurs a plusieurs bobines connectées ensemble en 3 phases. Il est nécessaire de déterminer à quelles conclusions de la boucle ces trois phases sont connectées. Cela peut être fait en suivant les pistes sur la carte de circuit imprimé avec une loupe.
Souder doucement les fils à ces bornes.



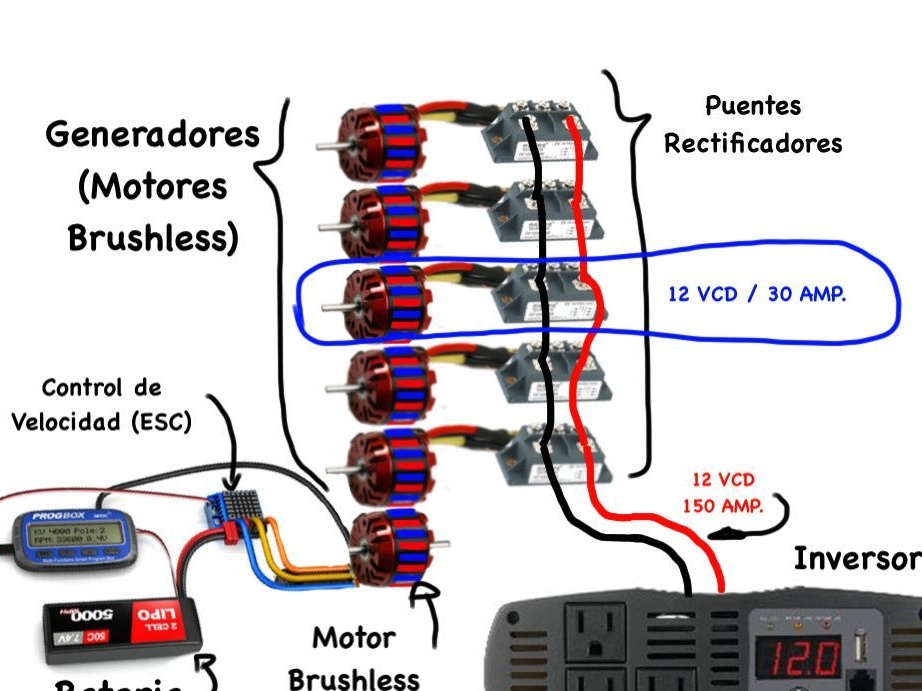
Nous assemblons un circuit électrique.
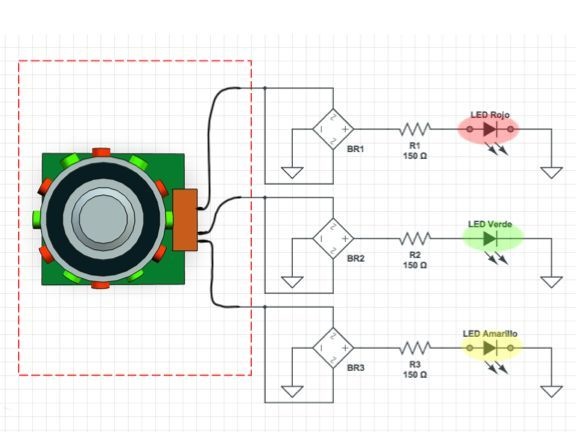

Dans les moteurs de soupape, qui sont utilisés comme générateurs, dans cette conception, la sortie sera une tension triphasée alternative. Pour obtenir une tension constante, des ponts à diodes pleins sont utilisés.Des demi-ponts peuvent également être utilisés, mais cela réduira le courant de charge maximal possible. Dans le schéma, chaque phase est connectée à la LED, cela est fait pour plus de clarté. En pratique, toutes les phases après les redresseurs seront connectées ensemble.
Nous assemblons toute la structure




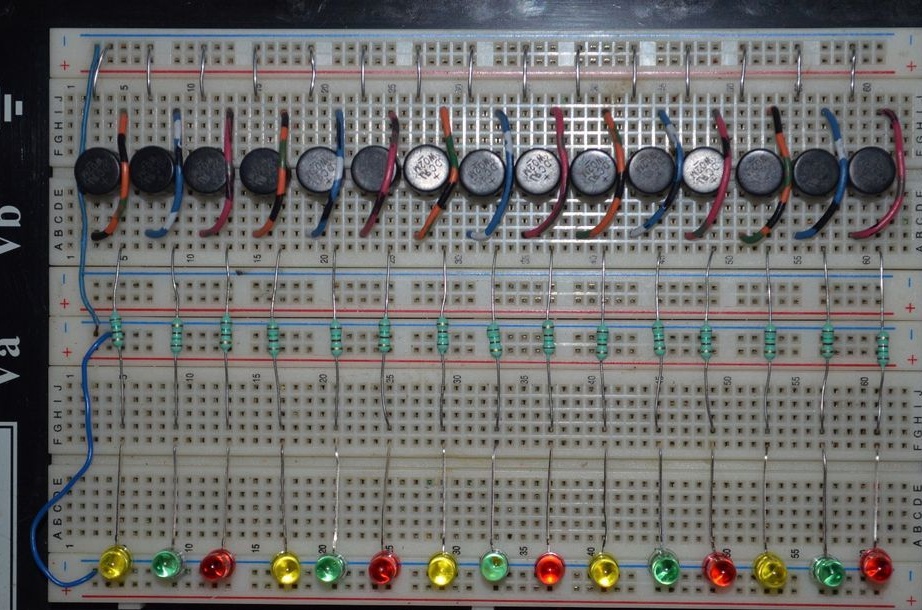
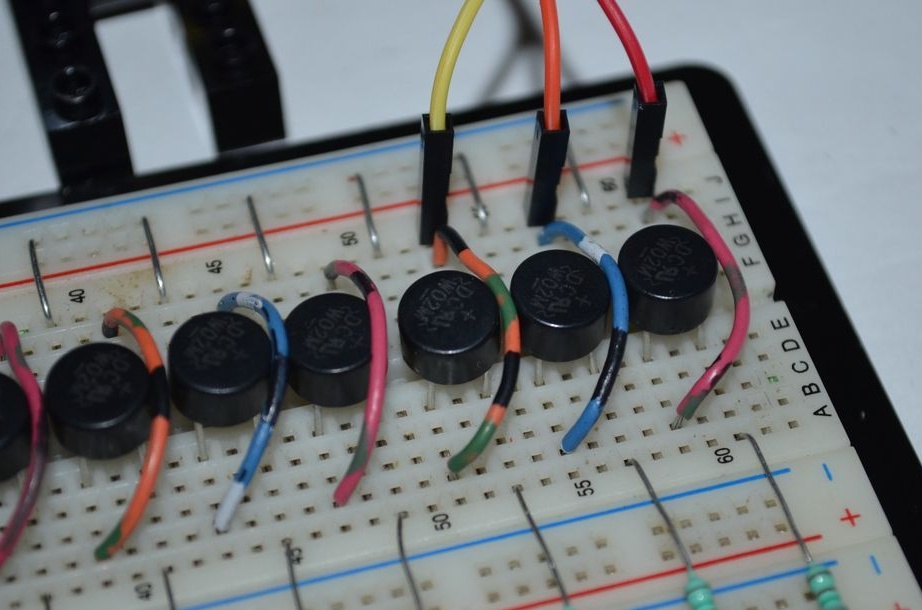
Placez les moteurs l'un à côté de l'autre comme indiqué sur la photo. Plus vous rapprochez les moteurs les uns des autres, plus vous pouvez atteindre des vitesses élevées sans perdre la synchronisation entre les moteurs.


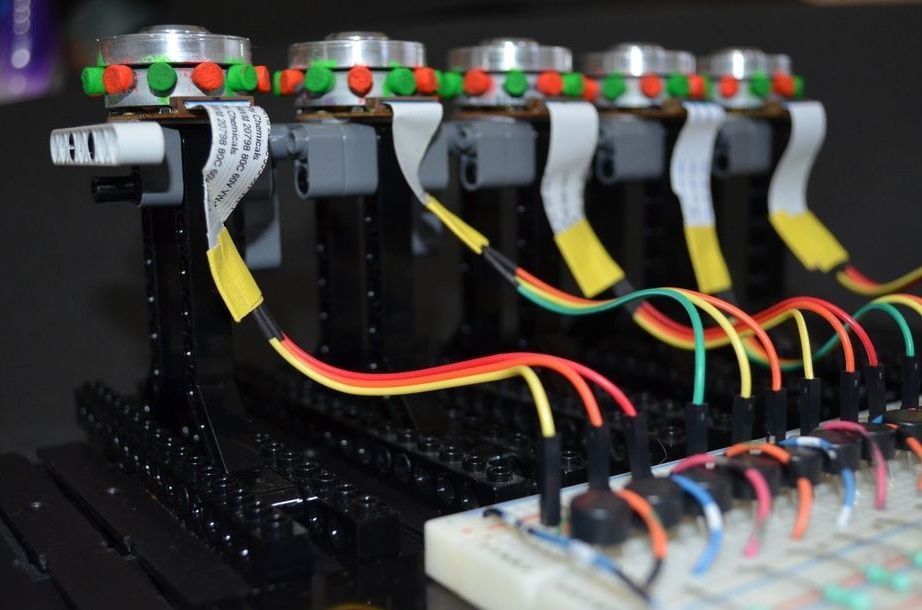
Connectez tous les fils du moteur aux ponts de diodes. IMPORTANT!: les moteurs doivent être fermement fixés à la base, ils tourneront à des vitesses élevées et de fortes vibrations apparaîtront en raison des aimants déséquilibrés des aimants.
Après l'assemblage, plusieurs tests ont été effectués, voici ce qui s'est avéré au cours des expériences:
Plus les moteurs tournent vite, plus la tension de sortie est élevée (loi de Faraday)
Plus les moteurs tournent vite, plus la probabilité de séparation des aimants est élevée: wink :: wink:
Si vous augmentez la distance entre les moteurs, ils seront plus faciles à démarrer, mais à haute vitesse, la synchronisation est perdue. Si l'écart est réduit, alors pour les lancer, vous avez besoin de plus d'efforts, mais la synchronisation n'est pas interrompue.
Recommandations pour la prochaine étape:
Utilisez des moteurs brushless OUTRUNNER inférieurs à 1000KV (KV = RPM / Volt).


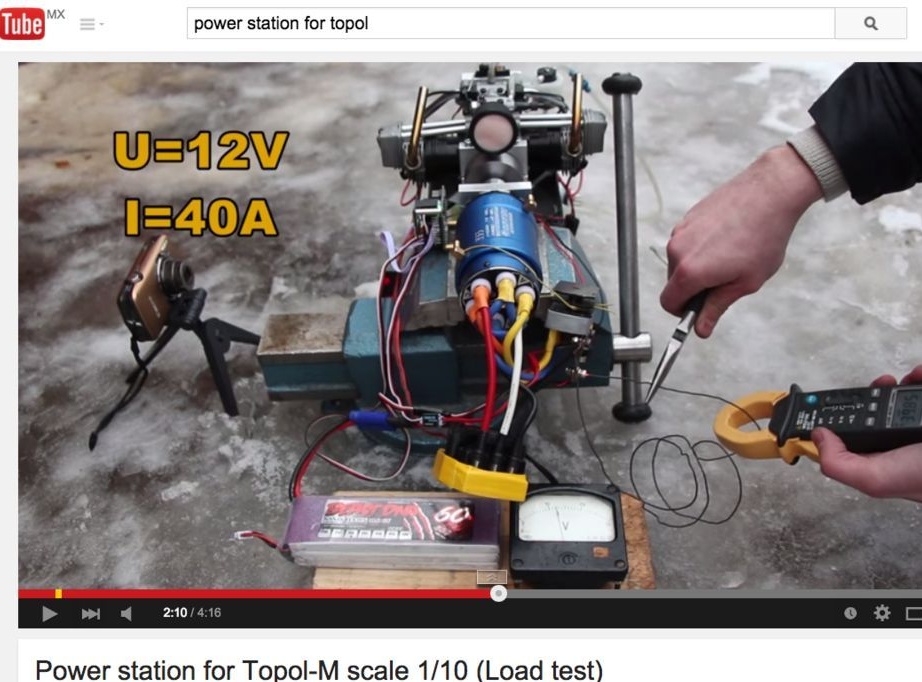
La photo ci-dessus montre un exemple de contrôle du contrôle de vitesse et de la puissance de sortie. Faites attention au chauffage des moteurs par minute pour assurer un fonctionnement optimal et, si nécessaire, assurer le refroidissement. (Les moteurs OUTRUNNER des bateaux sont refroidis par eau)
L'auteur utilise des moteurs à partir de lecteurs de CD / DVD 12v 1A, ce qui donne 12W de puissance. Si vous utilisez des moteurs de modèles d'avion, vous pouvez obtenir des résultats impressionnants, car il existe de petits moteurs de plusieurs centaines de watts. Si vous les attachez ensemble, vous pouvez obtenir une puissance de 1500 watts.

Sur la photo ci-dessous, le prototype d'entraînement Topol M
Vous pouvez également modifier la configuration des générateurs pour l'adapter à la charge.