


Matériaux et outils pour l'assemblage:
- contrôleur rotatif;
- intel Edison avec Arduino Tableau de discussion
- pilote I2C PWM;
- répartition de l'horloge en temps réel;
- mini I2C OLED;
- deux servos;
- Trois servos à engrenages métalliques;
- deux fils pour un servo variateur de 30 cm de long;
- prise de montage pour fiche;
- interrupteur à bascule à deux positions;
- brosse et dentifrice;
- alimentation pour 5V 3A;
- une seringue en plastique;
- écrous et vis;
- écrou et tige filetée;
- un morceau d'acrylique transparent mesurant 61 cm x 61 cm x 3 mm;
- contreplaqué mesurant 91 cm x 61 cm x 6 mm;
- Imprimante 3D.
Processus d'assemblage du robot:
Première étape. Pièce mécanique
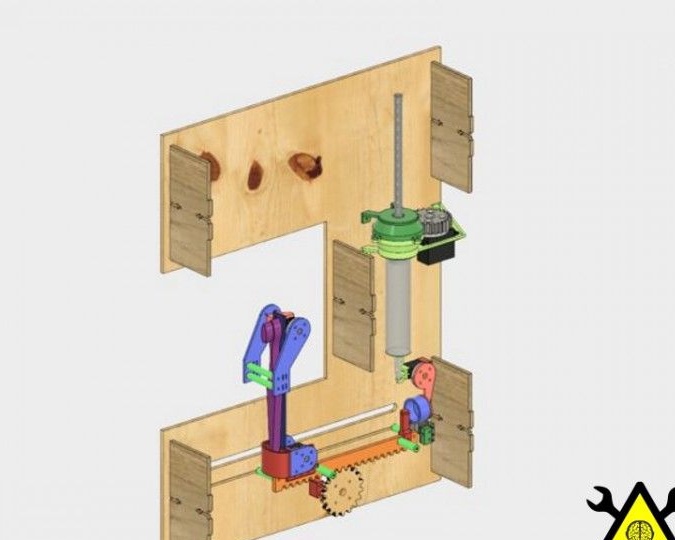
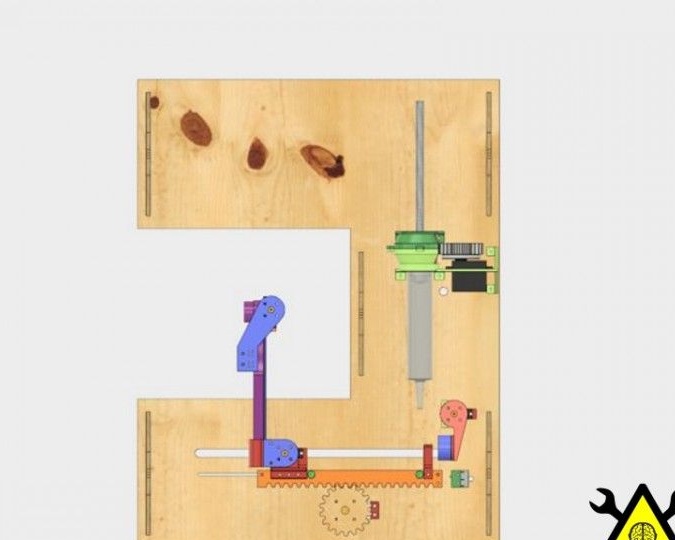
L'appareil a d'abord été modélisé à l'aide d'une combinaison de Fusion 360 et d'Illustrator. Dans le processus, toute une technologie a été créée, qui inclut l'impression 3D, ainsi que la découpe laser du métal. Au total, le système peut être divisé en quatre nœuds principaux. Cela comprend un chariot, un porte-brosse à dents, un corps principal et un distributeur.
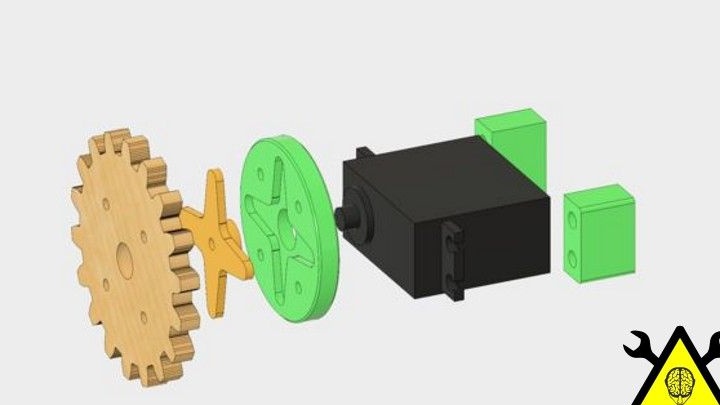
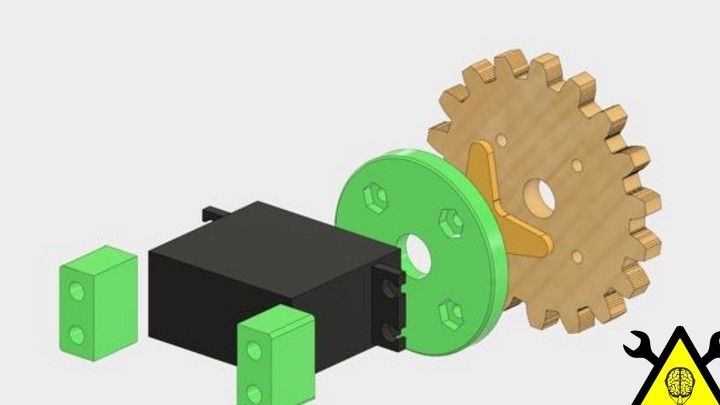
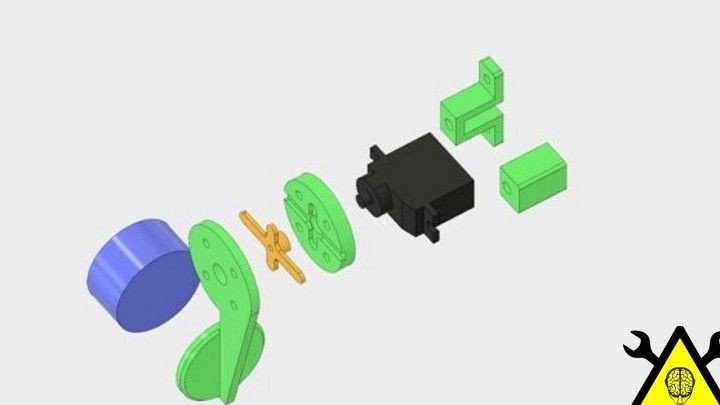
Afin que les produits faits maison soient utilisés pour des besoins plus larges, il a été décidé de modéliser des adaptateurs pour les micro-servos standard et. Ces adaptateurs ont des fentes pour fixer des arbres standard, ainsi qu'un espace pour quatre écrous à l'arrière. Étant donné que les adaptateurs ont été conçus pour des arbres, ils doivent être fixés soit sur les plaques, soit sur d'autres objets.

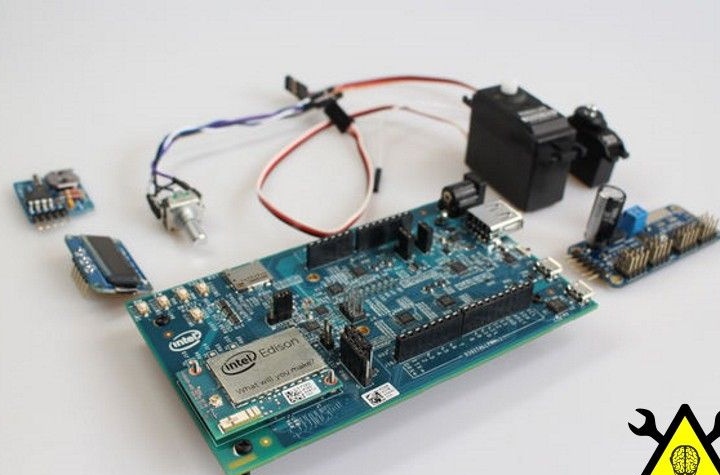
Deuxième étape Le circuit électrique de l'appareil
Une source 5V et 3A est utilisée comme alimentation. Cela suffit pour alimenter un moteur. Quant à la carte principale, elle consomme environ 500 mA et les entraînements du moteur, la LED d'origine et l'horloge en temps réel consomment une petite quantité de courant.
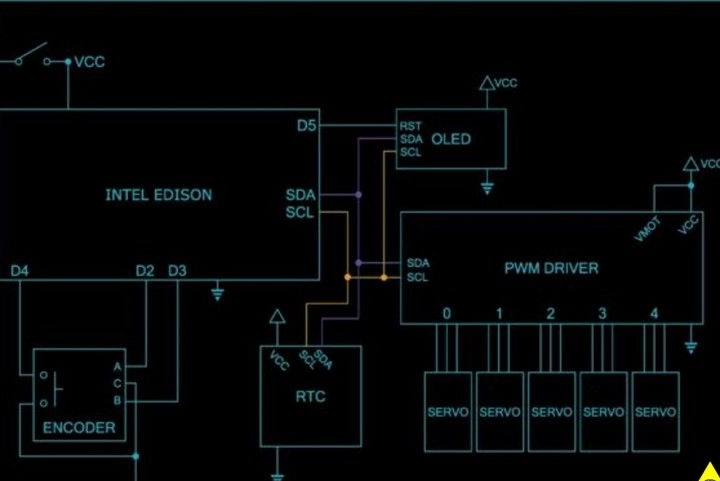
Le processeur Intel Edison est utilisé comme contrôleur principal du système. En raison de la séparation des cartes, le processeur peut facilement communiquer avec d'autres composants de l'électronique. La carte se connecte au moteur, à l'horloge et à l'écran.
Pour contrôler les cinq servos, une carte PWM est utilisée. La puissance des moteurs peut être contrôlée à l'aide d'une source externe, mais l'auteur a décidé de lier le Vmot à la broche VCC.Grâce à cela, l'ensemble du système est alimenté en 5V.
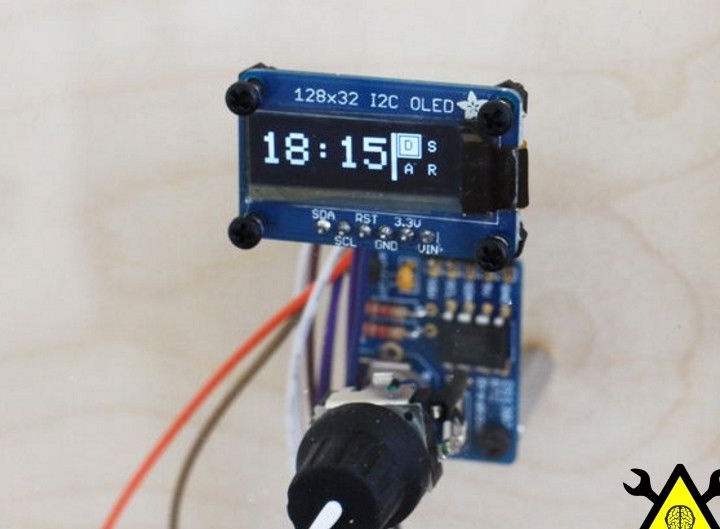
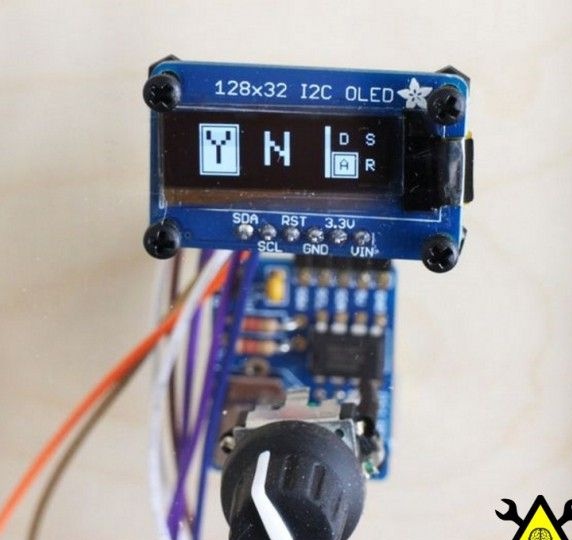
Afin que l'appareil puisse être contrôlé, un petit écran de taille 128 x 32. Un capteur rotatif sert d'entrée principale pour l'utilisateur. Les sorties du capteur sont connectées aux contacts numériques du processeur.
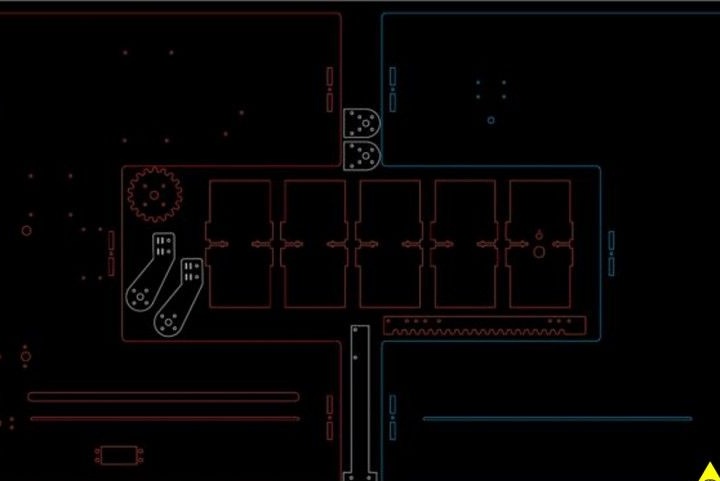
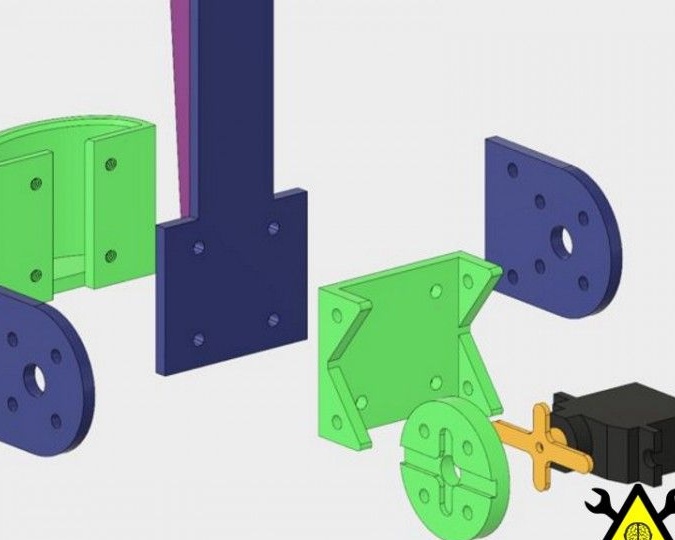
Troisième étape Assemblage du corps
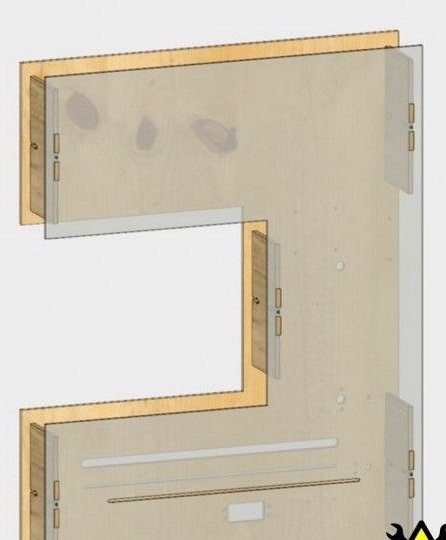
La partie arrière sert de support au boîtier, elle est en contreplaqué d'une épaisseur de 6 mm. Quatre vis sont utilisées pour fixer le PWM et le processeur. Edison est monté à l'avant et PWM à l'arrière.
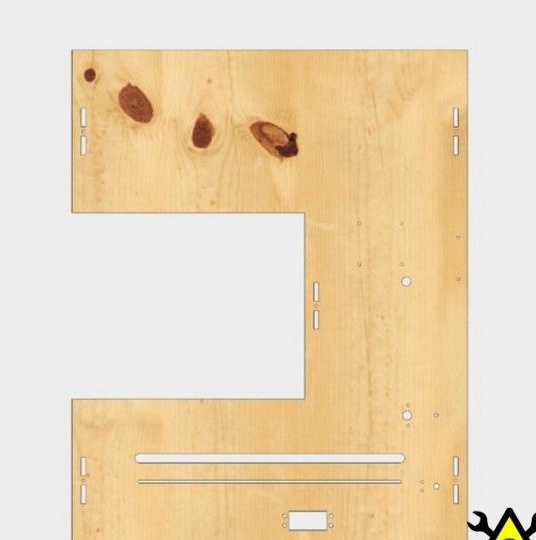
Cinq plaques d'espacement sont utilisées pour connecter les panneaux avant et arrière. Les entretoises sont fixées aux plaques avec des vis et des écrous appropriés. Les plaques sont presque symétriques, mais les protubérances sur un bord sont plus courtes, elles ne s'étendent pas vers l'avant. L'interrupteur, ainsi que le connecteur d'alimentation, est fixé à l'entretoise inférieure.

Quant au panneau avant, il est nécessaire principalement pour protéger l'appareil pendant son fonctionnement. Quatre vis sont utilisées pour fixer l'écran; le capteur rotatif est également fixé avec des écrous.
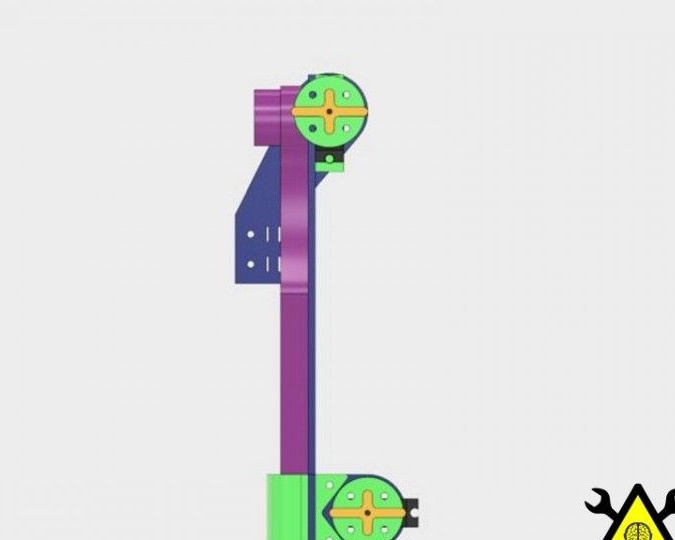
Quatrième étape Support pour brosse à dents
Il y a deux servos sur le porte-brosse à dents, qui sont entraînés par plusieurs unités - la base et la «tête». Dans l'image, vous pouvez voir les éléments bleus et verts. Ce qui a été coupé avec un cutter laser est coloré en bleu et les éléments imprimés sur une imprimante 3D sont colorés en vert.

Grâce à la tête, la brosse à dents ne tombe pas. Les aiguilles sont entraînées par un seul servomoteur, elles sont fixées avec deux joints. Un adaptateur 3D et deux vis sont utilisés pour fixer le servomoteur à la plaque principale. Il y a quatre fentes dans la plaque, à travers elles, à l'aide de bandes de caoutchouc noir, une brosse à dents est fixée.
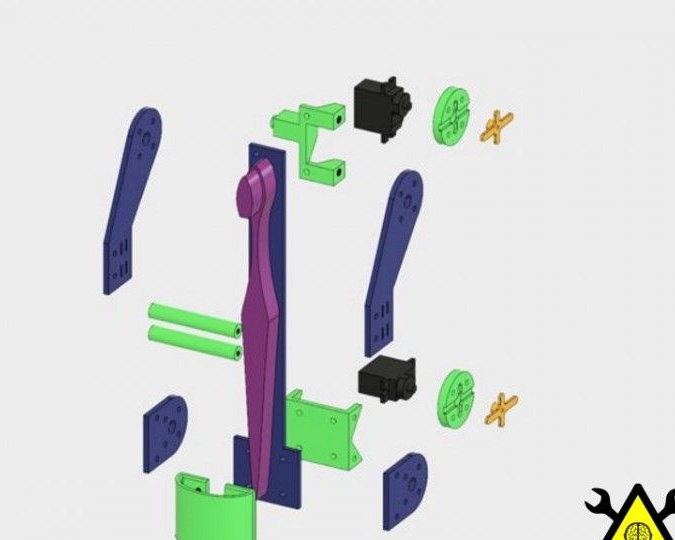
La base est une petite tasse 3D, elle empêche la brosse de tomber. Une fois la brosse à dents chargée dans l'assemblage, le servo-entraînement la tient et tourne vers le bas. Huit vis sont utilisées pour connecter les plaques.


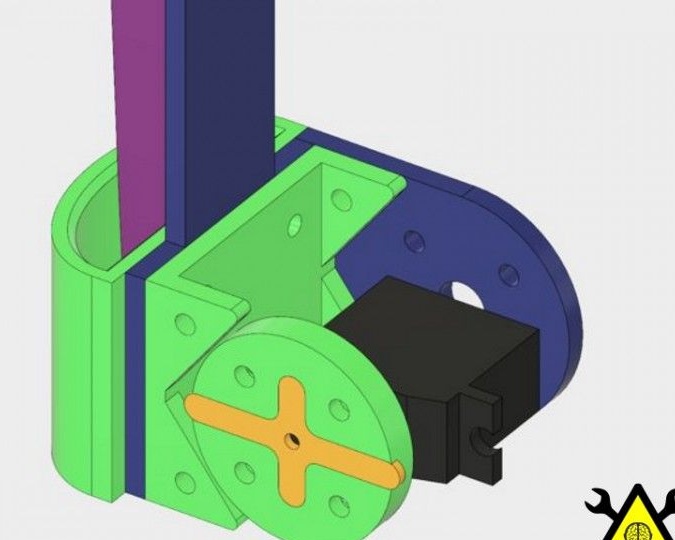
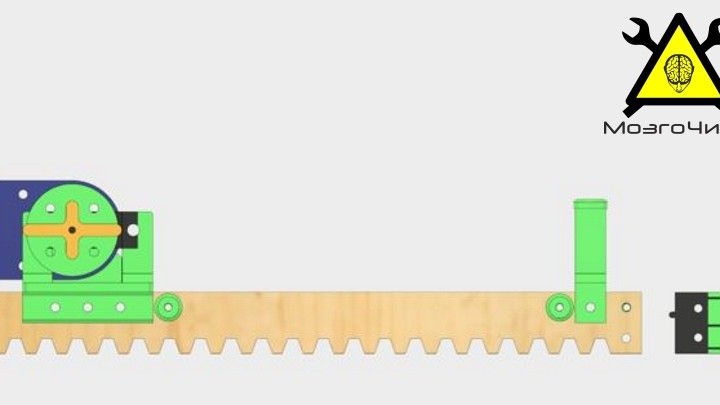
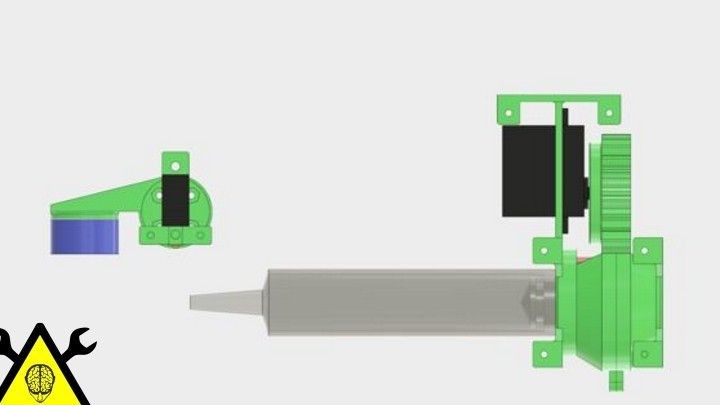
Cinquième étape Montage sur rail
Le cadre se compose de trois parties uniques, c'est un appui-tête, un chariot et des jambes de force. À l'aide du chariot, le support de cadre est fixé. Le chariot lui-même est fixé avec trois vis. L'appuie-tête est nécessaire afin de réduire la charge sur le support de servo principal, il est monté plus loin sur le chariot sur le châssis.
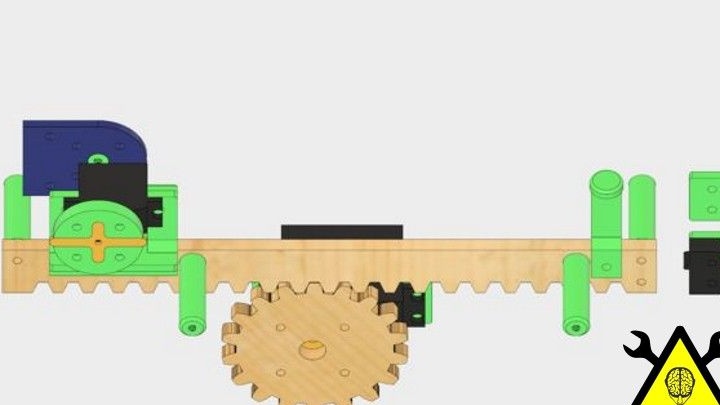
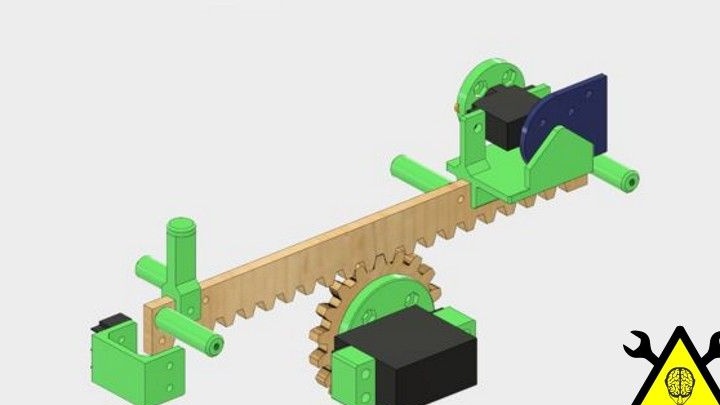
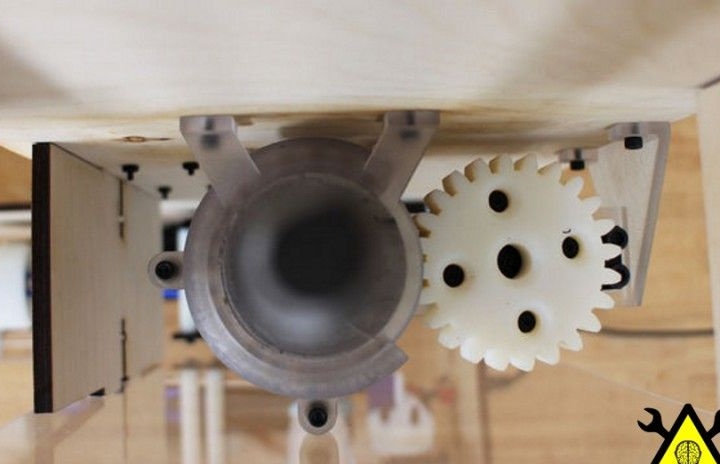
L'engrenage est monté sous le châssis. Il est découpé en contreplaqué de 6 mm d'épaisseur et fixé à un arbre de servo standard. La servocommande elle-même est placée légèrement décalée par rapport à la plaque de base, en relation avec cela, il y a des entretoises rectangulaires identiques sur elle. Le servo lui-même est fixé à la base avec quatre vis.
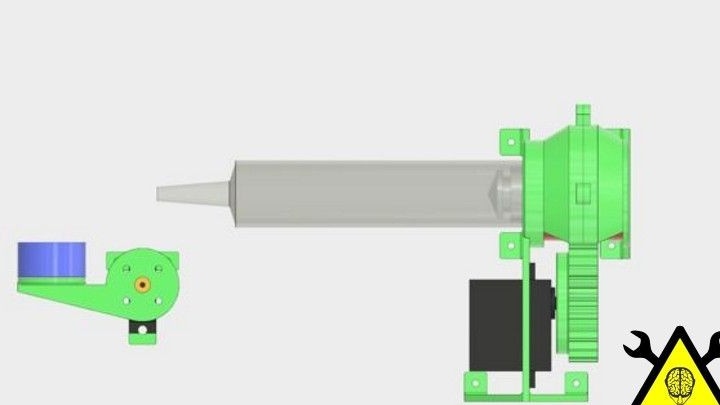
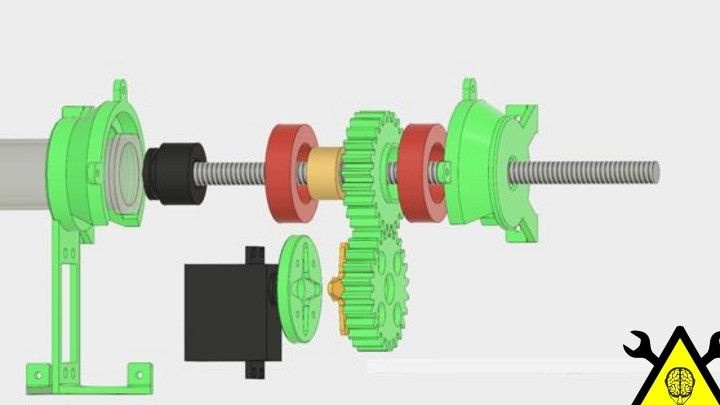
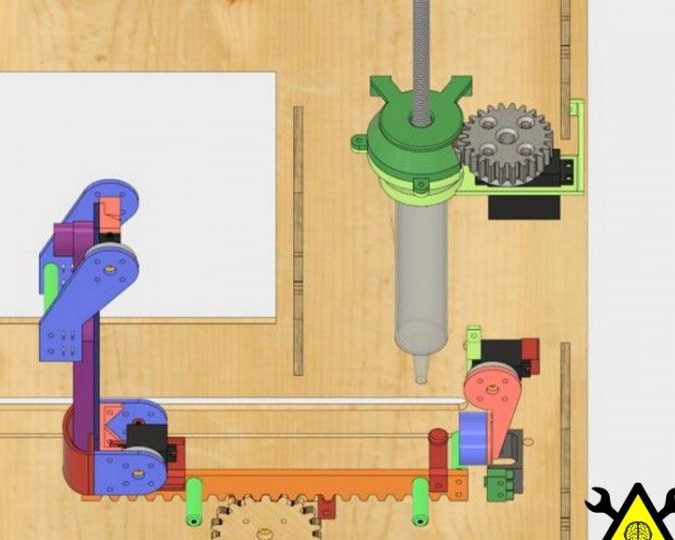
Étape six Montage du distributeur
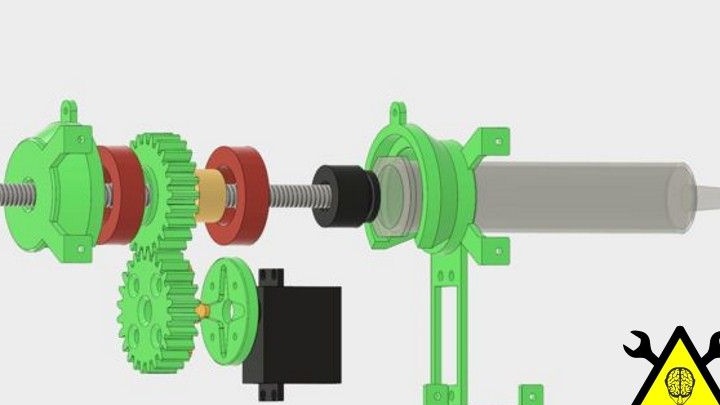
Le mécanisme le plus complexe de l'appareil est un entraînement linéaire. Grâce à lui, le dosage de la pâte a lieu. Le noyau de l'appareil est une tige filetée et un écrou, à l'aide de cela, le tube est comprimé. Six vis sont utilisées pour fixer le lecteur.
Septième étape. Logiciels
Au total, le programme a trois fonctions: régler l'heure, régler "l'alarme", et aussi la fonction de démarrage de l'appareil.
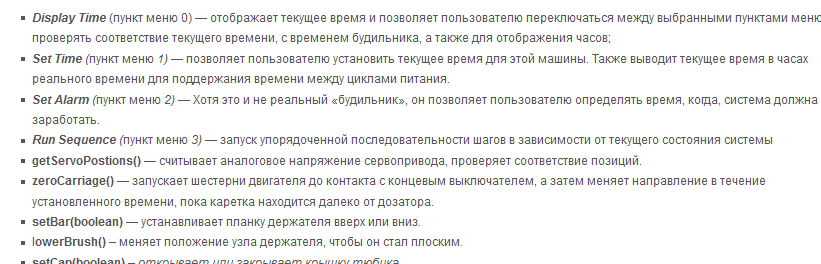
C'est tout, après avoir clignoté et configuré l'appareil est prêt à l'emploi.