


Mais d'abord, découvrons ce que c'est et pourquoi c'est nécessaire. En fait, son nom nous dit son but. Il est formé du mot latin curvus, qui signifie courbe ou ondulé. Autrement dit, un curvimètre est un compteur de distance à roues ou à rouleaux. Deux types de courbures sont distingués: les petits (cartographiques), qui sont généralement utilisés pour les mesures sur la carte, et les grands (route), qui sont généralement utilisés pour mesurer la longueur des sections courbes des autoroutes déjà existantes. Ils peuvent être utilisés partout où cela est gênant ou impossible à mesurer avec la roulette standard, donc le projet promet d'être intéressant.
La première chose à prendre en compte lors de la construction du curvimètre est une roue ou un rouleau. Elle doit être suffisamment petite pour que la précision de l'instrument soit élevée, en même temps, elle doit être suffisamment grande pour que la valeur des lectures ne soit pas grandement affectée par l'inégalité de la surface mesurée. Dans mon cas, la roue a un diamètre de 14 centimètres.

Vous devez maintenant déterminer le matériau et la taille de la structure. J'ai utilisé un arbre.

Sur les barres, j'ai fait un marquage et fait les coupes et les trous nécessaires.

J'ai ensuite assemblé les pièces usinées à l'aide de petites vis autotaraudeuses.
Maintenant, s'écartons un peu du curvimètre lui-même et réfléchissons à la façon dont cette chose peut même déterminer la distance? Tout est assez simple. Nous avons juste besoin de calculer le nombre de tours de la roue et de le multiplier par la longueur de sa circonférence extérieure, et il est encore plus facile d'ajouter une valeur de longueur à chaque fois que la roue fait une autre révolution.
Pour compter chaque révolution dans le cas le plus simple, vous pouvez utiliser le "contact coulissant". Cependant, je ne recommande pas d'utiliser un tel mécanisme de référence. Il est préférable d'utiliser un interrupteur à lames ou un capteur à effet Hall.
Il est temps d'essayer sur une roue. Je vais le fixer avec un long boulon. Nous trouvons un endroit sur le cadre où la jante de roue est aussi proche que possible de celle-ci et marquons avec des traits. Autour de cette zone, nous devons installer le commutateur à lames.

Sur la roue, vous devez installer un petit aimant.Assurez-vous que sa force sera suffisante pour fermer les contacts du commutateur à lames.
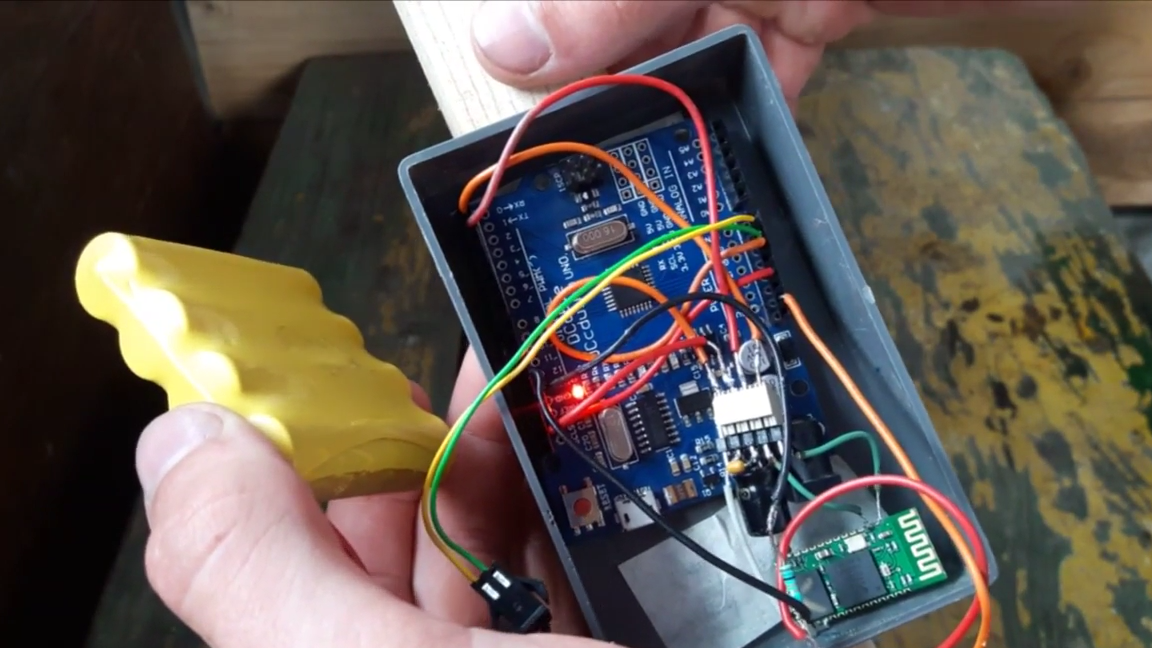
Maintenant, nous serons engagés dans des "cerveaux" de système. Dans mon cas, ce sont des frais Arduino UNO. Il lira l'état du commutateur à lames et transmettra des données via la connexion Bluetooth, en utilisant le module HC-05, au téléphone. À propos, l'interrupteur à lames est connecté à la carte comme un bouton ordinaire. Je pense que la connexion du module Bluetooth ne devrait pas poser de problème.
Quant au code lui-même, il est très simple. Et j'ai essayé de le commenter pour que tout soit le plus clair possible.
int gercon = 12; // connecté l'interrupteur reed à 12 broches
double distance = 0; // a créé une double variable pour stocker la distance
void setup () {
Serial.begin (9600); // connecté une connexion série
}
boucle vide () {
/ * Ensuite est la boucle if. Si l'interrupteur à lames est fermé, le calcul de distance suivant a lieu. La valeur 0,46472 est déjà la longueur calculée d'un tour de roue. Pour éviter les données "supplémentaires", ajoutez un délai de 200 millisecondes et affichez les lectures
* /
if (digitalRead (gercon) == HIGH)
{
distance = distance + 0,46472;
retard (200);
Serial.println (distance);
}
} 
Voici notre curvimètre et prêt!
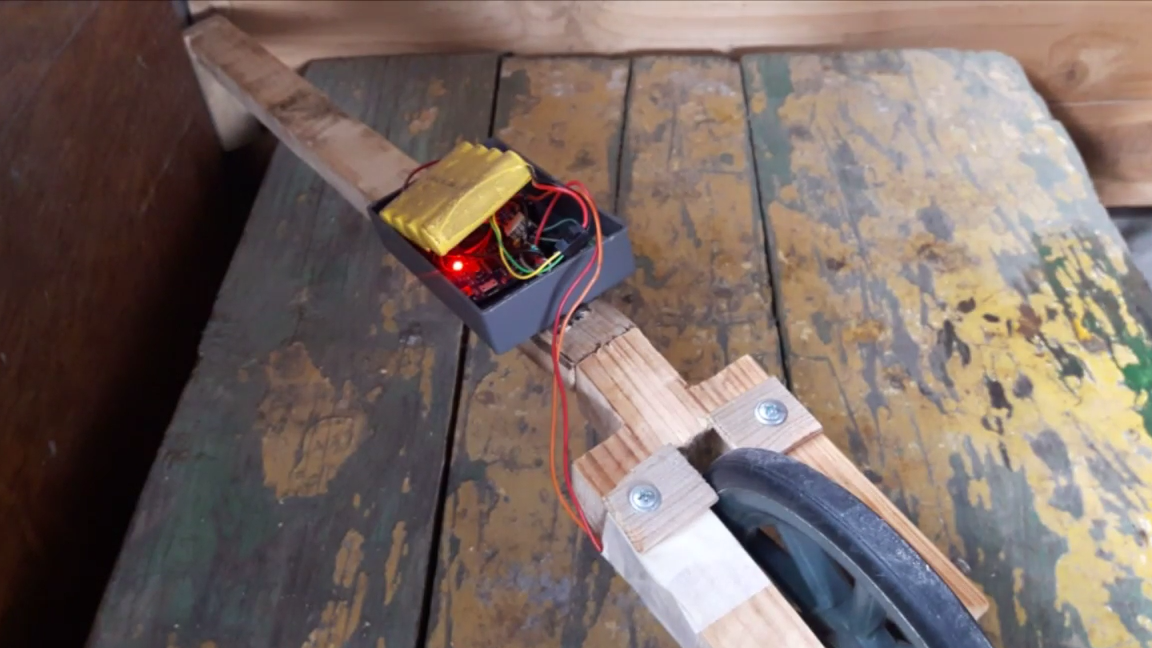
Faisons quelques courses d'essai. Tout fonctionne très bien!

Vous pouvez regarder une vidéo sur l'assemblage de cet appareil, peut-être y trouverez-vous quelque chose d'intéressant.
[media = https: //youtu.be/kx_7ztPsLws]
Bonne répétition du projet!