


J'ai pris une partie de ma conception à partir des instructions de montage pour Lego Technic 42029. Le reste est mon improvisation. Il nous faut donc:
- Lego Technic 42029
- Arduino Nano 382P
- DRV 8833 (mieux que Populus, mais vous pouvez également avoir un homologue chinois)
- 2 servo variateurs SG-90
- Récepteur IR
- Motoréducteur 200 tr / min
- 2 LED
- 2 résistances 150 ohms
- Condensateur 10v 1000uF
- 2 peignes à une rangée PLS-40
- 2 connecteurs PBS-20
- Inductance 68mkGn
- 6 batteries NI-Mn 1.2v 1000mA
- Connecteur papa-maman deux broches à câbler
- Homutik
- Fils de différentes couleurs
- souder
- Colophane
- couteau de papeterie
- fer à souder
- Boulons 3x40 et écrous et rondelles pour eux
- Boulons 3x60
- Batteries Ni-Mn 1.2v 1000mA 6pcs.
Étape 1, nous récupérons l'arrière de la suspension.
Tout d'abord, vous devez assembler la suspension arrière selon les instructions du Lego 42029 partie 1, à partir de 3 pages et 8 inclus. Ensuite, ajoutez quelques détails pour pouvoir installer le moteur et la boîte de vitesses.

Étape 2 suspension avant.
Nous assemblons la partie avant de la suspension selon les instructions de Lego 42029 partie 1, de la page 21 à 23. Nous prenons le trapèze de la deuxième partie des instructions Lego de la page 6 à 11. Nous assemblons le treuil de la deuxième partie de la page 14-22. Et la deuxième partie du pare-chocs est de 34-36 pages.
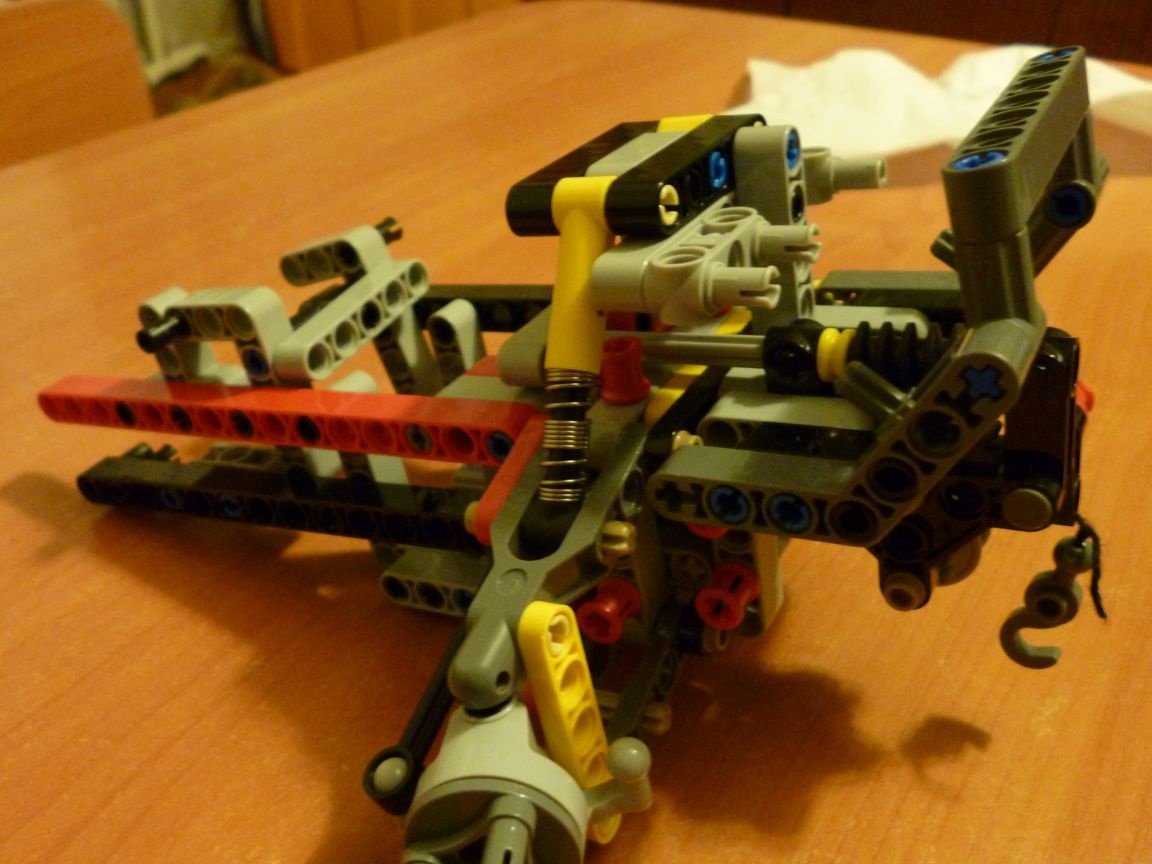
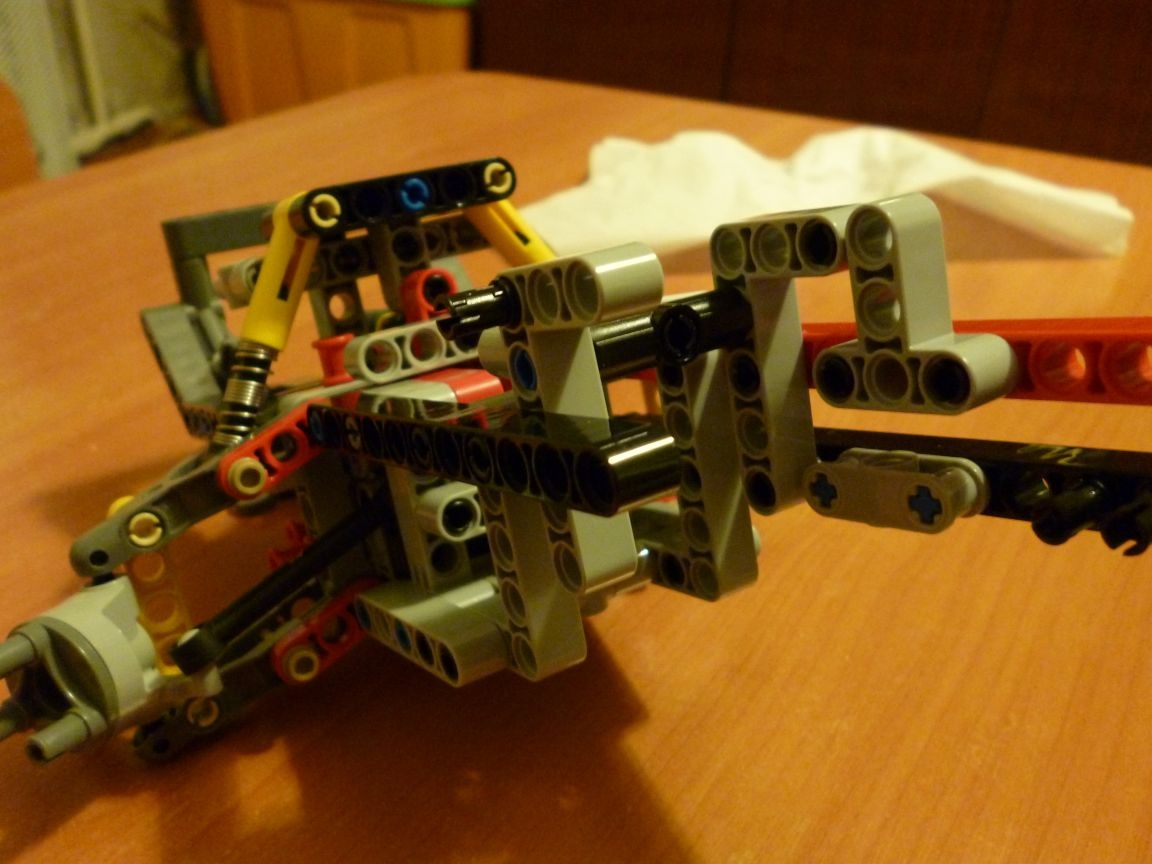
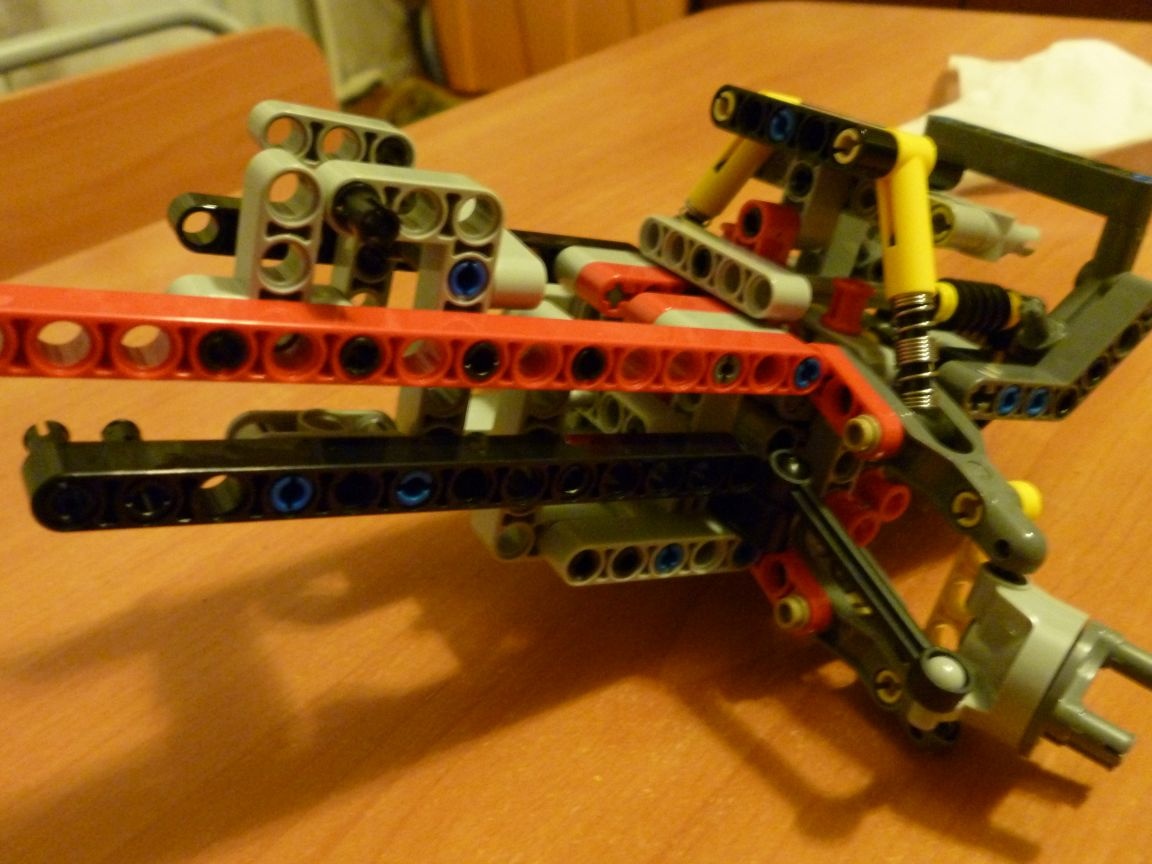

Étape 3 assemblez le châssis.
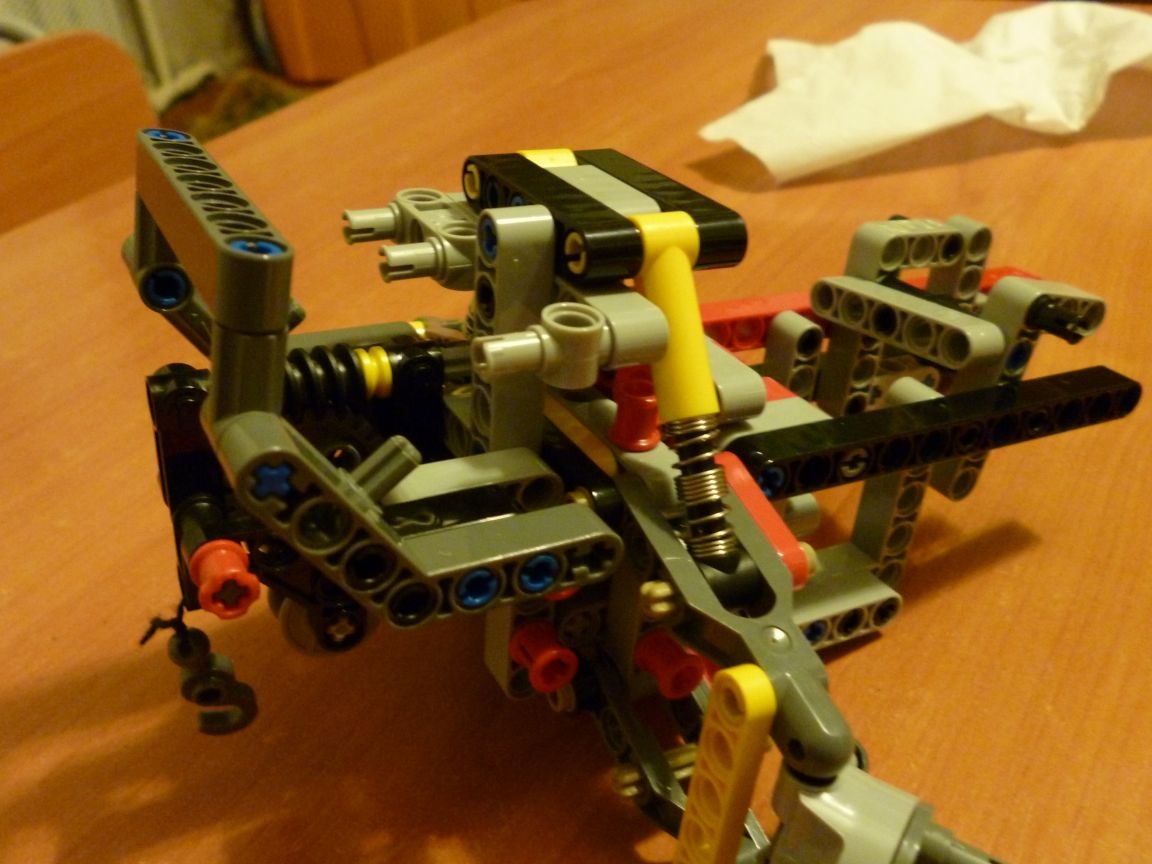
Nous connectons les deux parties comme indiqué sur la photo:

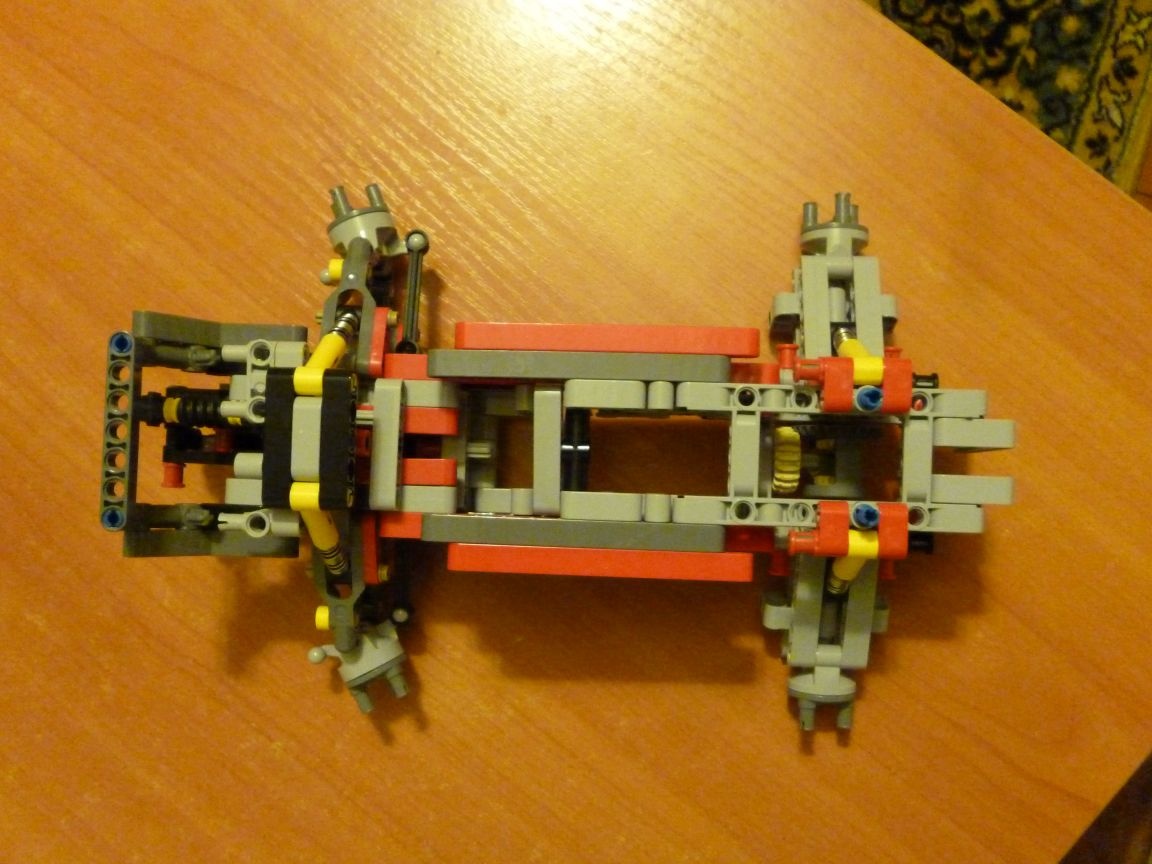
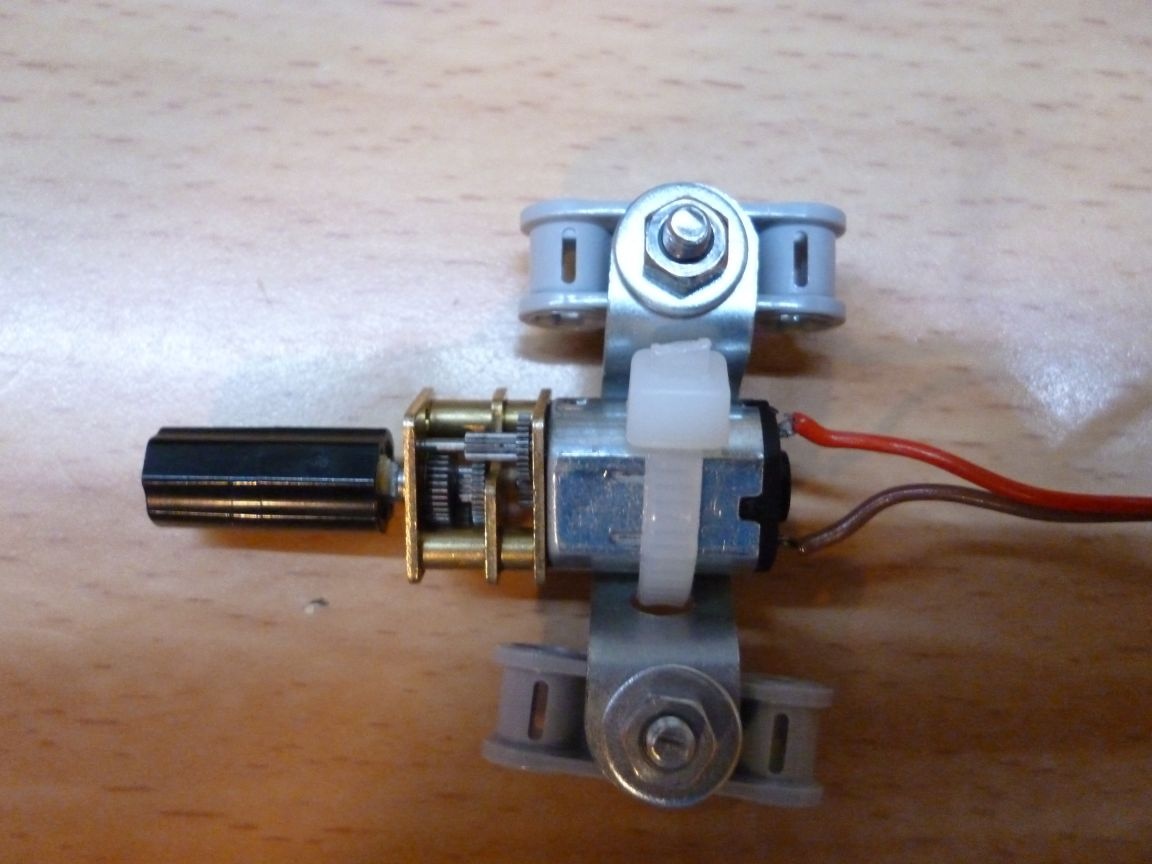
J'ai résolu le problème de la connexion du motoréducteur avec les pièces du concepteur comme suit: j'ai mis le manchon de connexion sur l'axe du motoréducteur et inséré une pièce d'allumette pour la fixation. Pour le montage du motoréducteur, utilisez du plastique métallique d'un concepteur de fer et une pince.
Il s'est avéré ce qui suit:
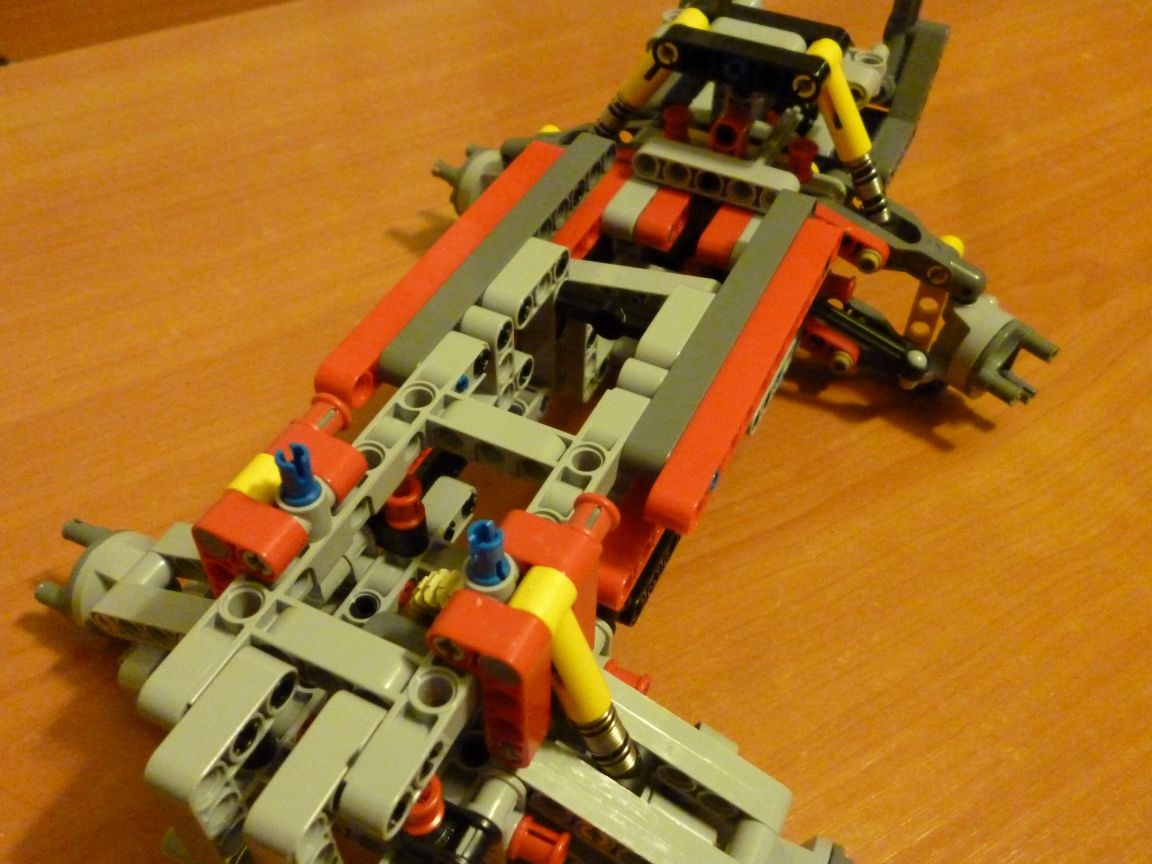
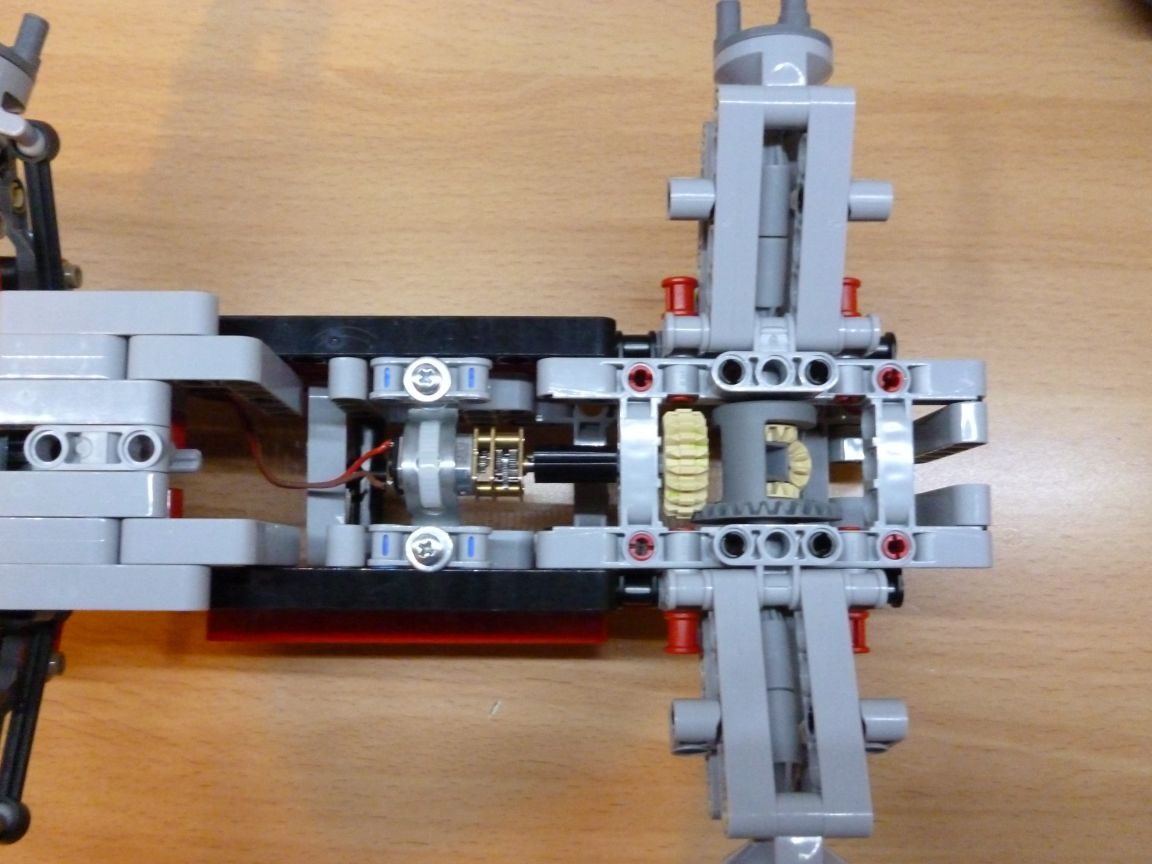
Monter sur le châssis:
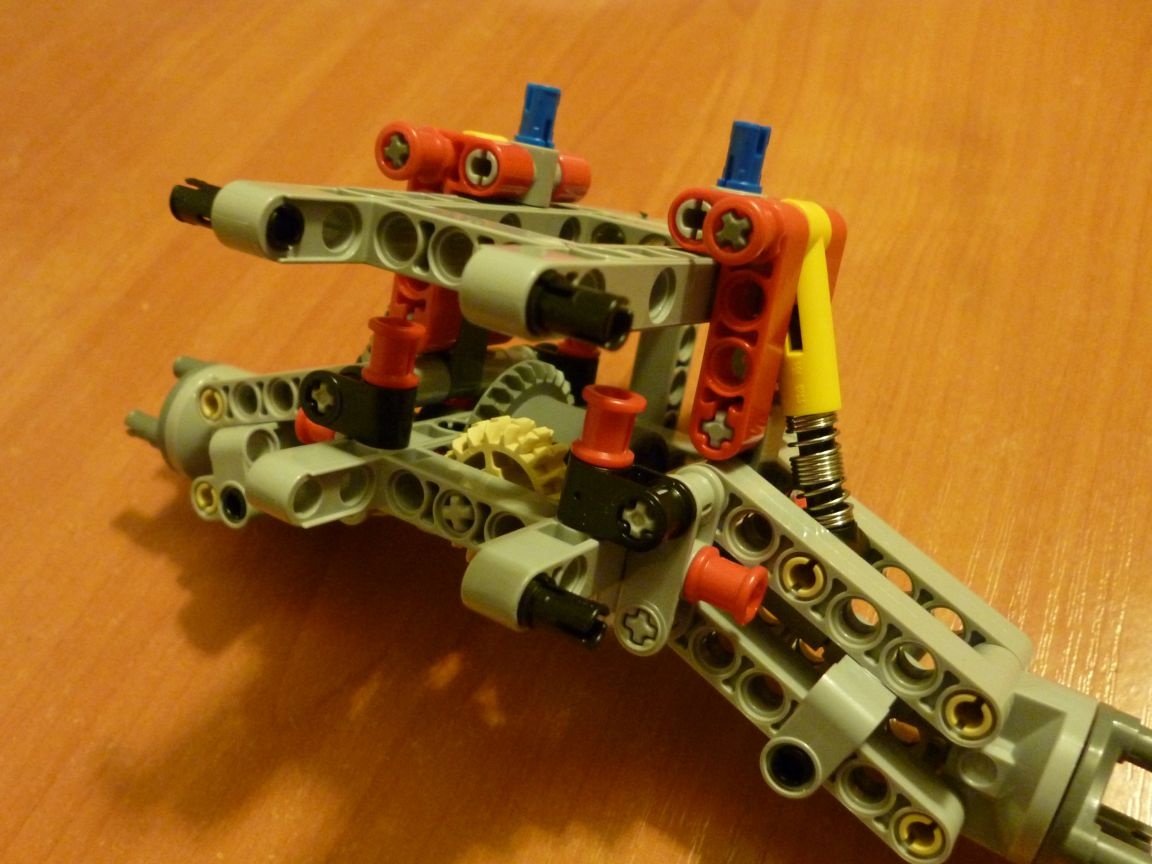
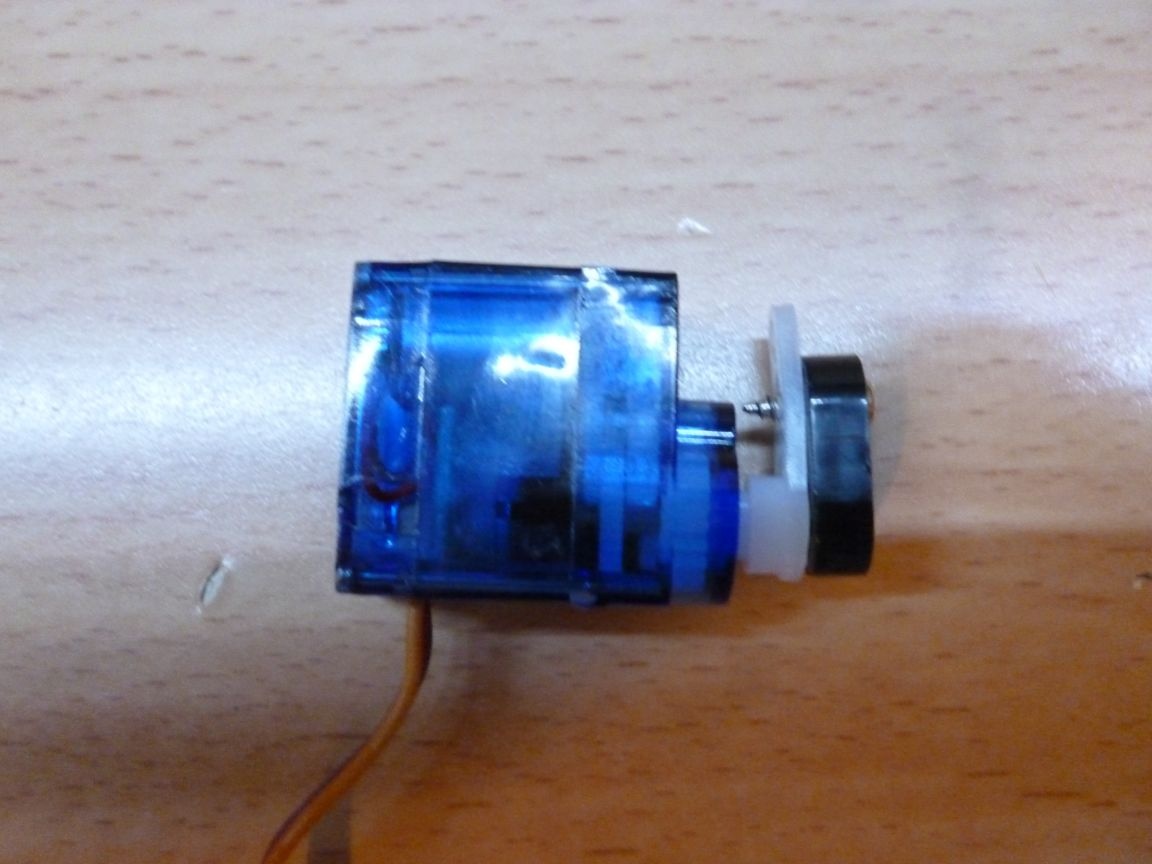
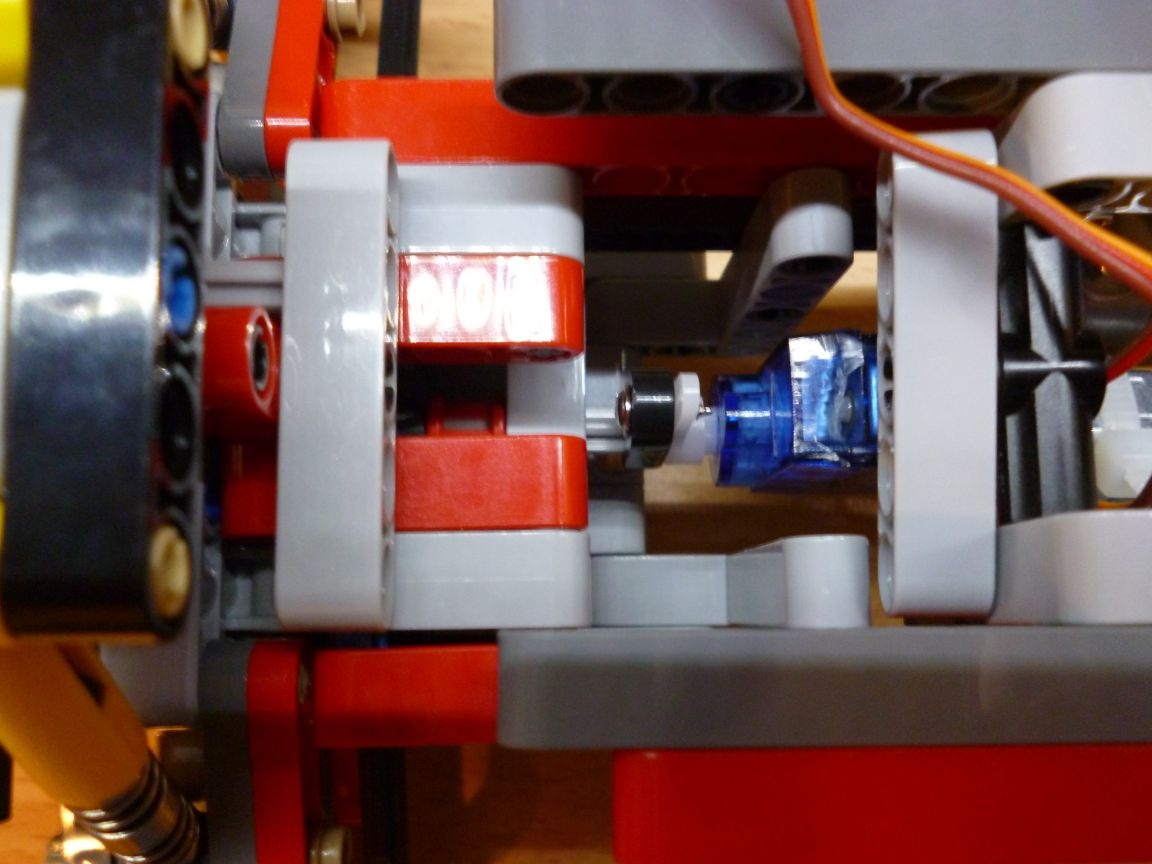
Pour effectuer la rotation a pris le servo SG-90. Il est nécessaire de percer soigneusement, afin de ne pas toucher les pièces internes, un trou traversant d'un diamètre de 3,2 mm ou tout simplement coupé avec un couteau à papeterie. Et également couper les parties saillantes («ailes» pour la fixation). Nous insérons un boulon dans le trou fait et le fixons avec des écrous. Sur l'arbre de servo, nous avons mis un levier avec une partie vissée de lego:
Installer:
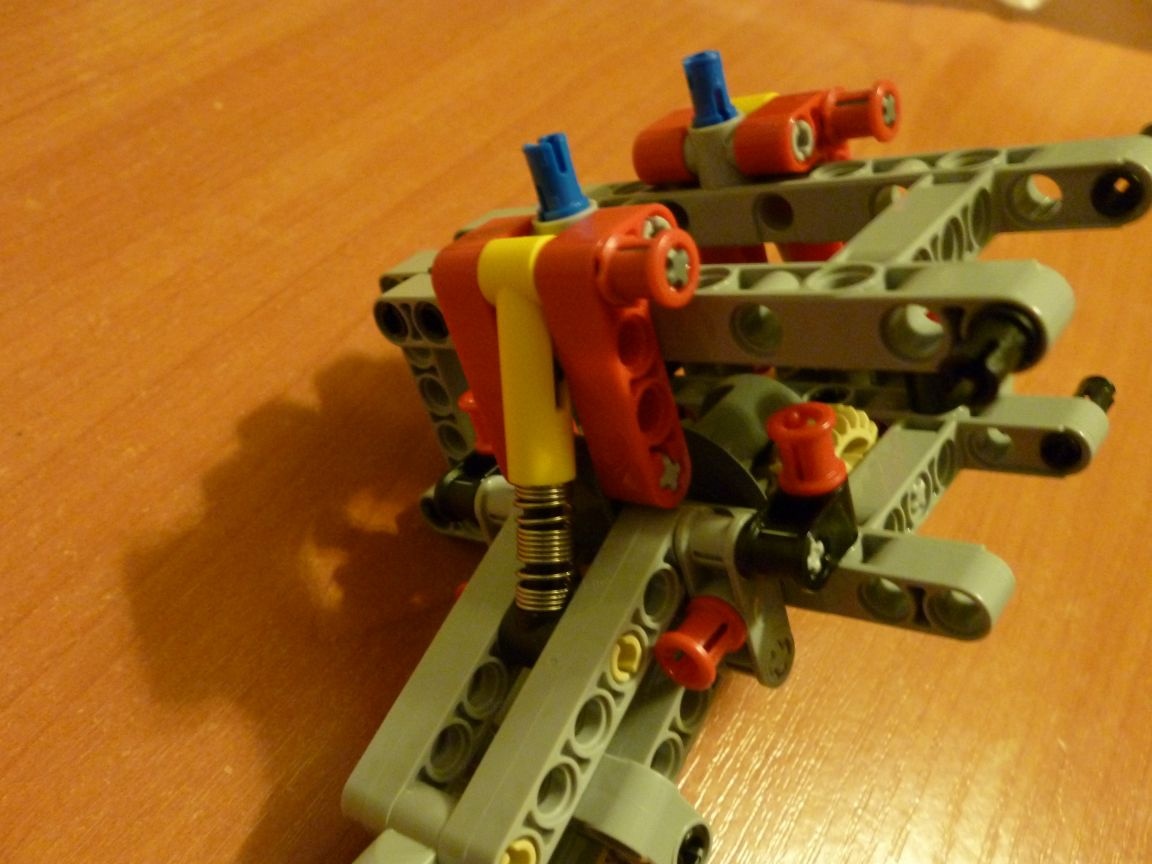
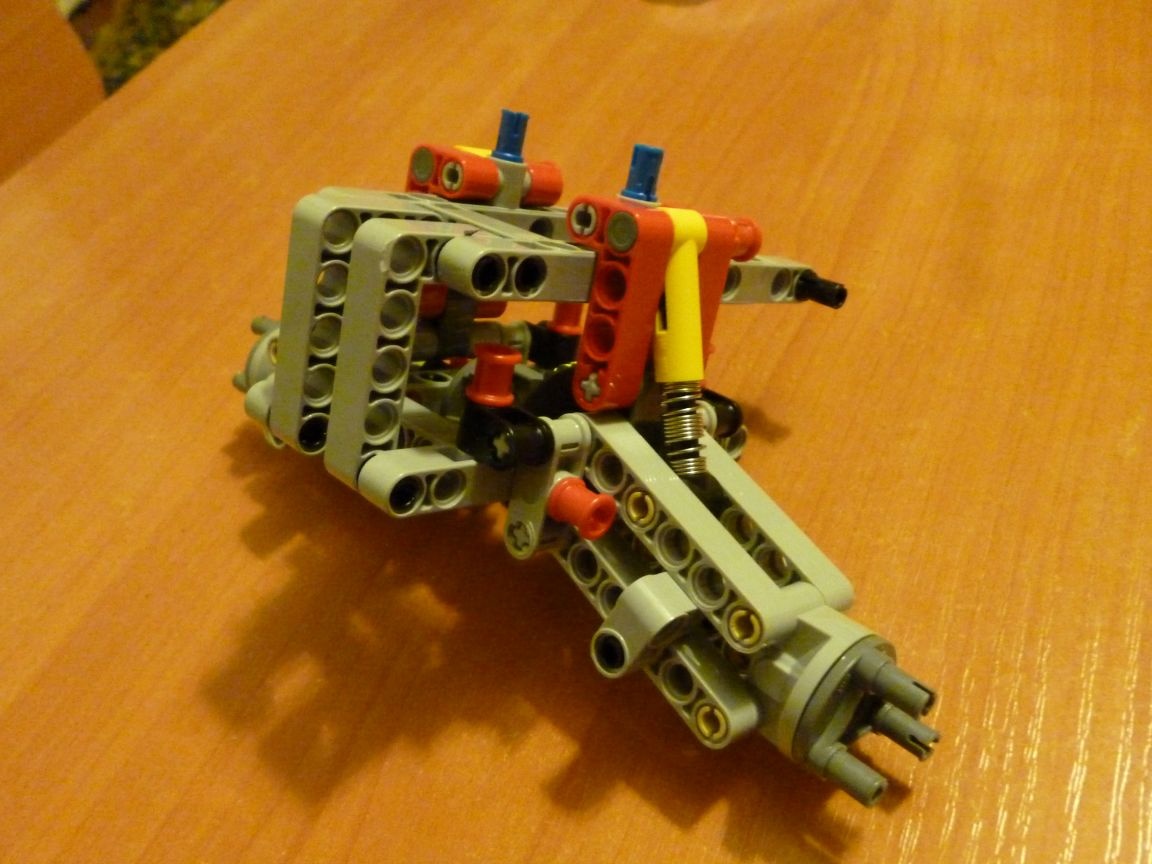
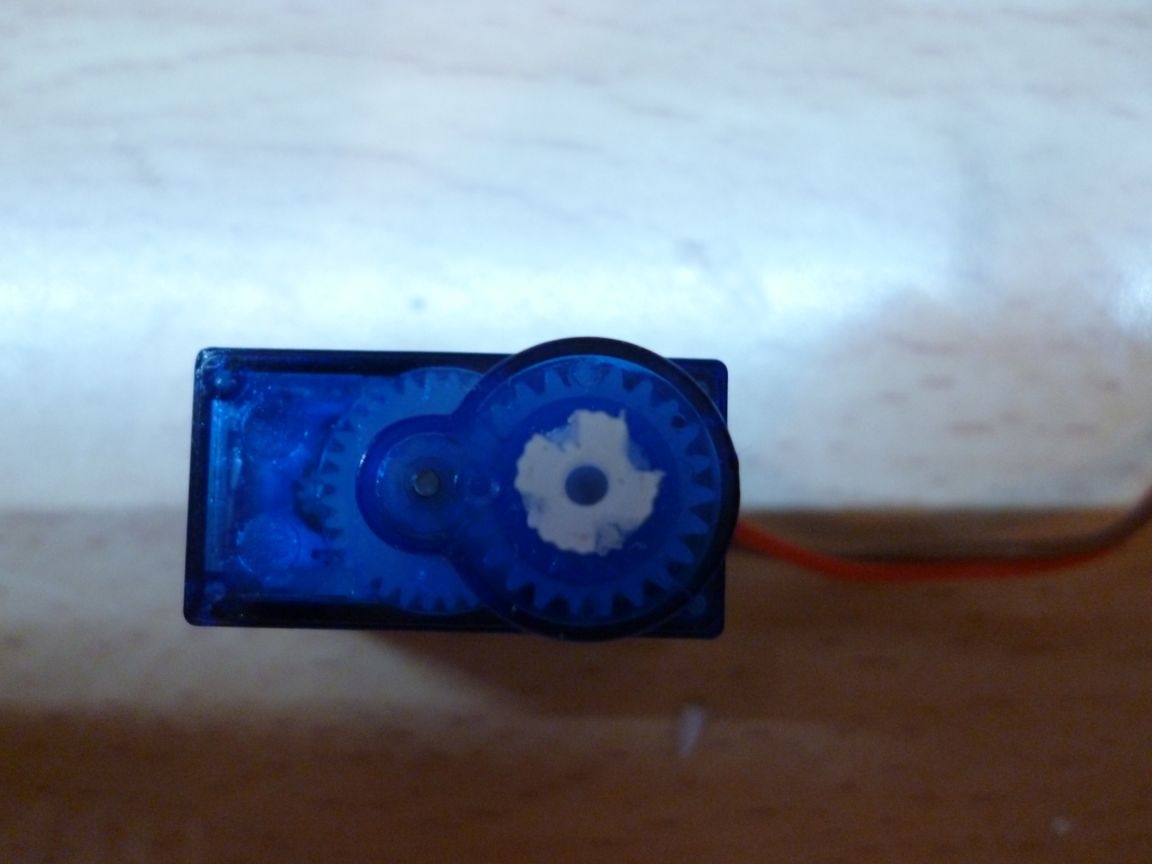
Nous utiliserons le deuxième servo pour le treuil. Nous faisons de même qu'avec le premier. Et maintenant, il doit être modernisé pour pouvoir tourner librement. Pour ce faire, nous démontons le servo variateur, retirons la carte et soudons les fils directement au moteur. Nous sortons le train principal et coupons ses arrêts de voyage.Et enfin, nous faisons une fente avec un couteau de bureau sur le train principal comme sur la photo:
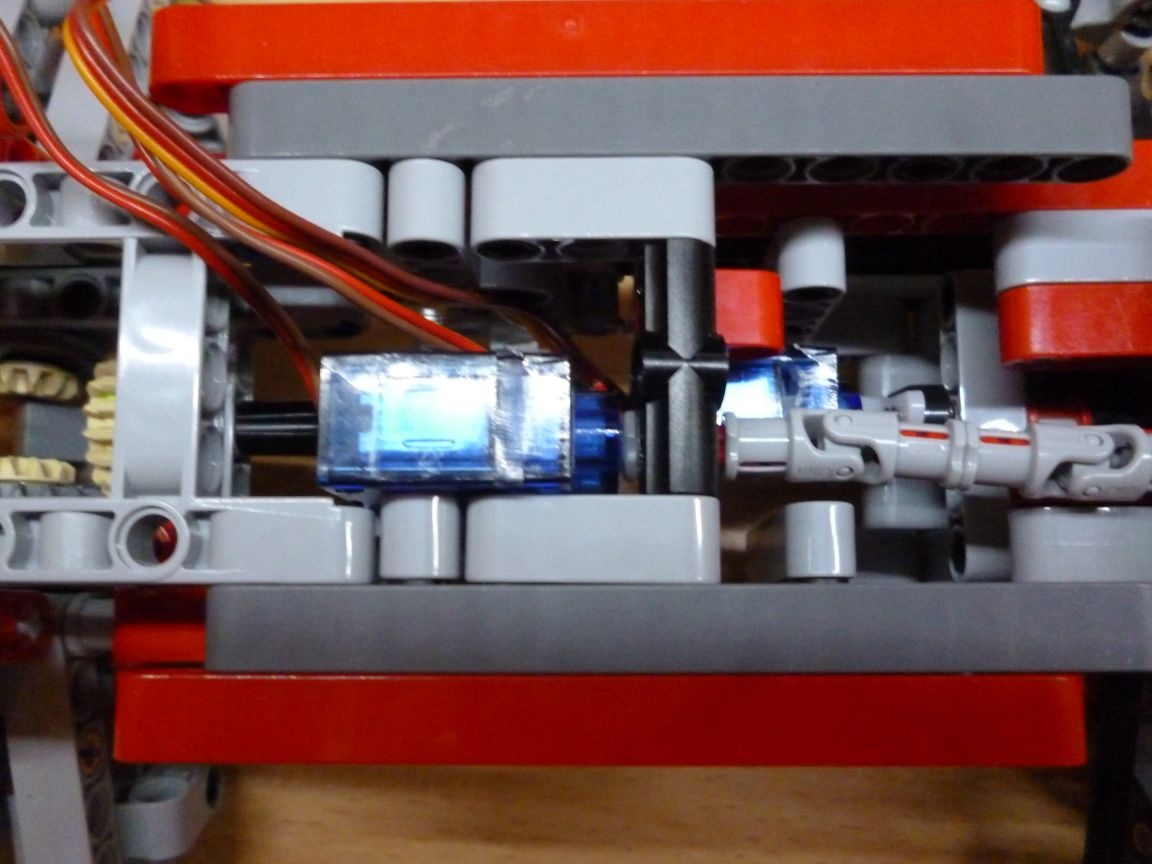
Nous nous connectons à notre treuil et installons le châssis:

Étape 4 Gérer le contrôleur
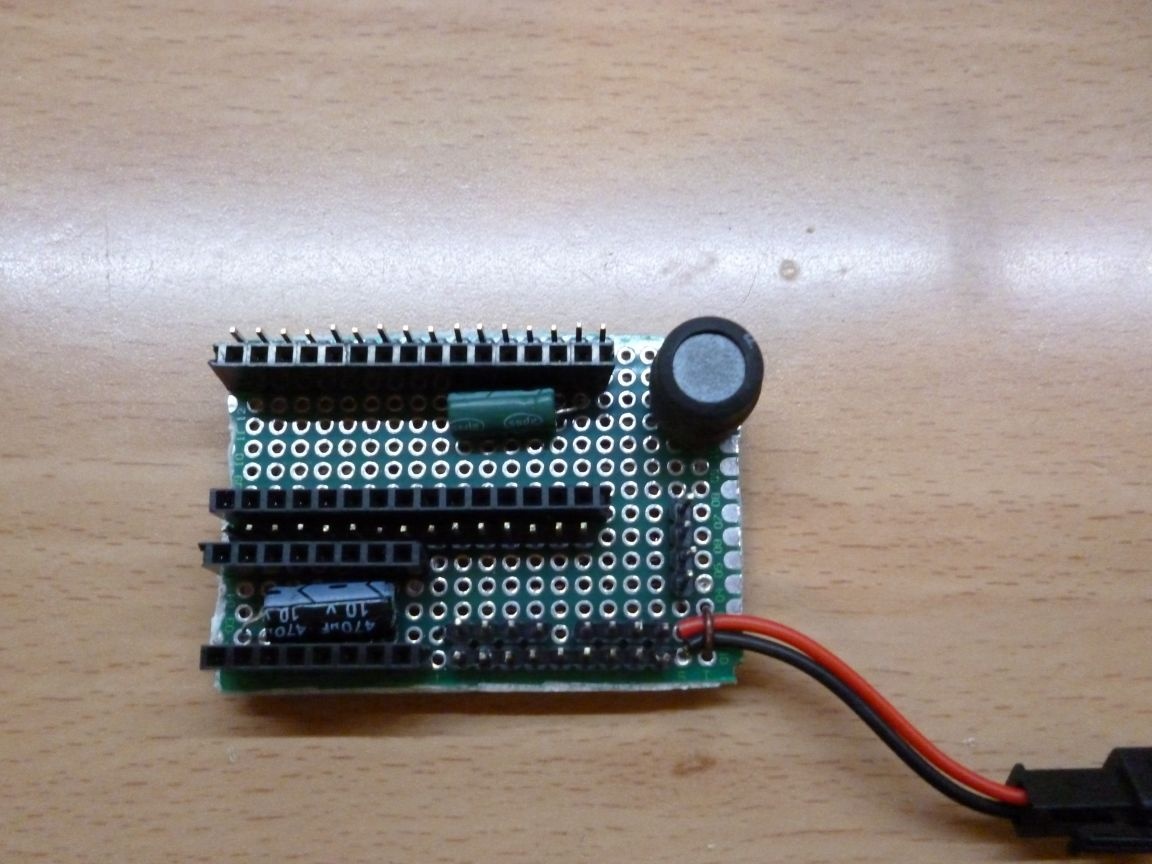
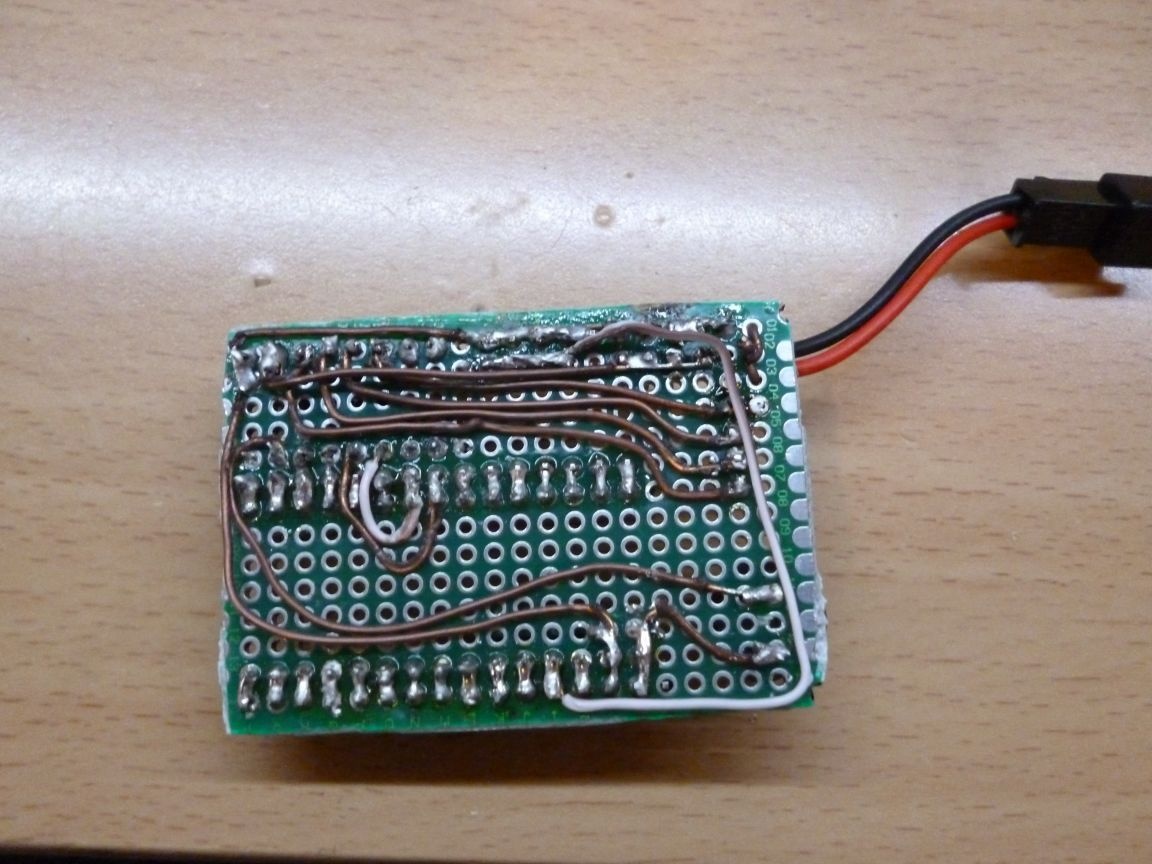
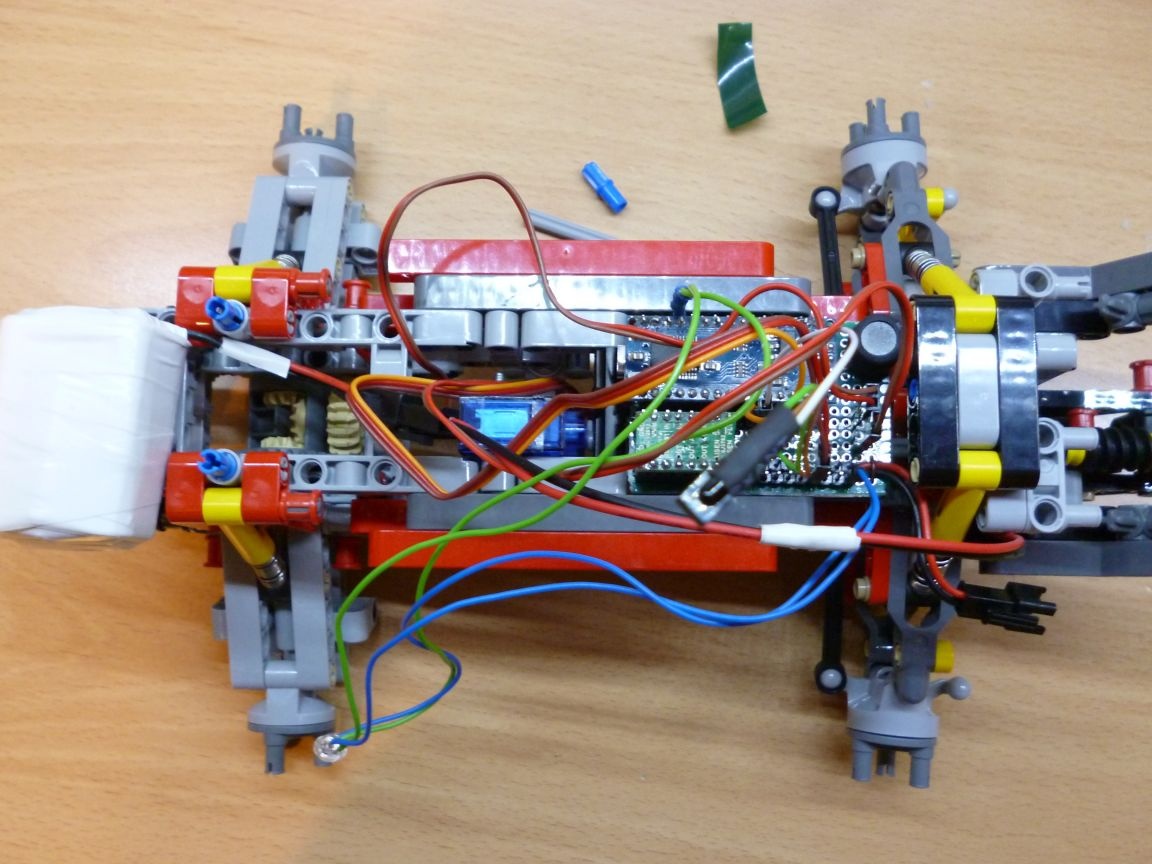
Pour le contrôle, nous utiliserons Arduino et un récepteur IR. Nous prenons un fer à souder et assemblons les éléments suivants sur le circuit imprimé:
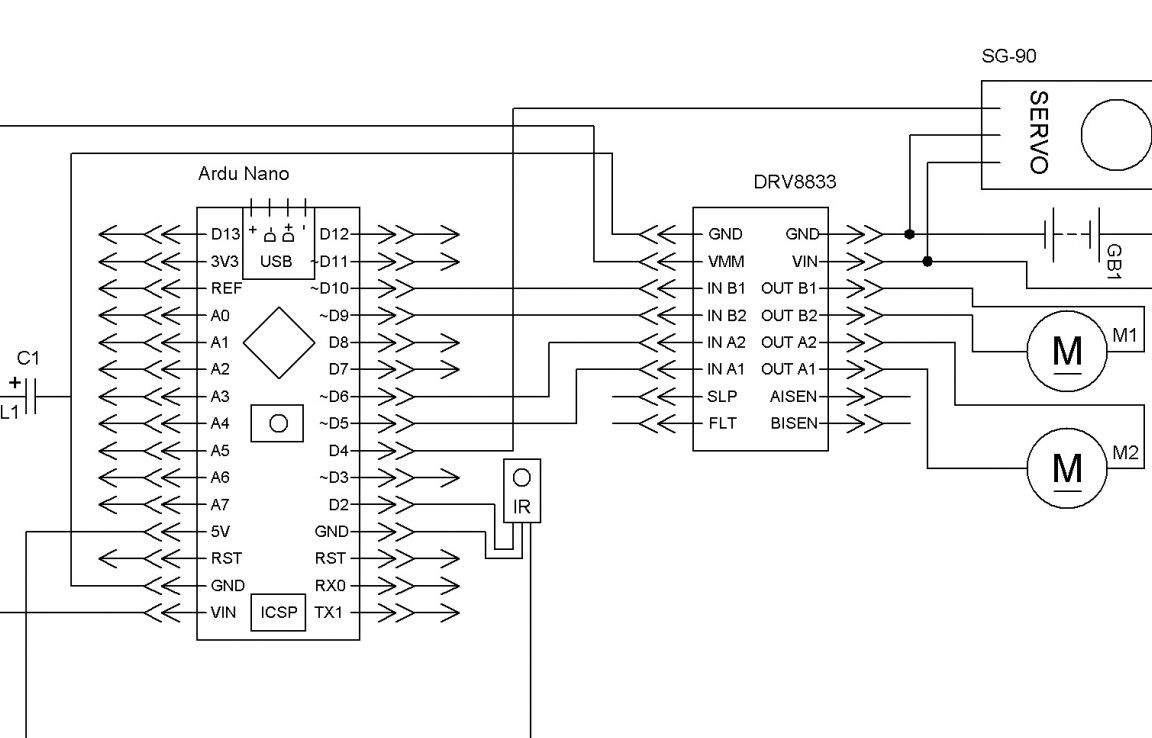
J'explique: tout condensateur de faible puissance, la bobine d'inductance que vous trouverez également, vous devez stabiliser la tension du microcontrôleur. Les résistances sont sélectionnées pour les LED utilisées. Le récepteur IR ou TSOP peut être retiré d'un vieux jouet ou acheté dans un magasin de radio. S'il y a de fortes interférences, ajoutez un condensateur au circuit d'alimentation du récepteur IR.
En conséquence, nous obtenons:
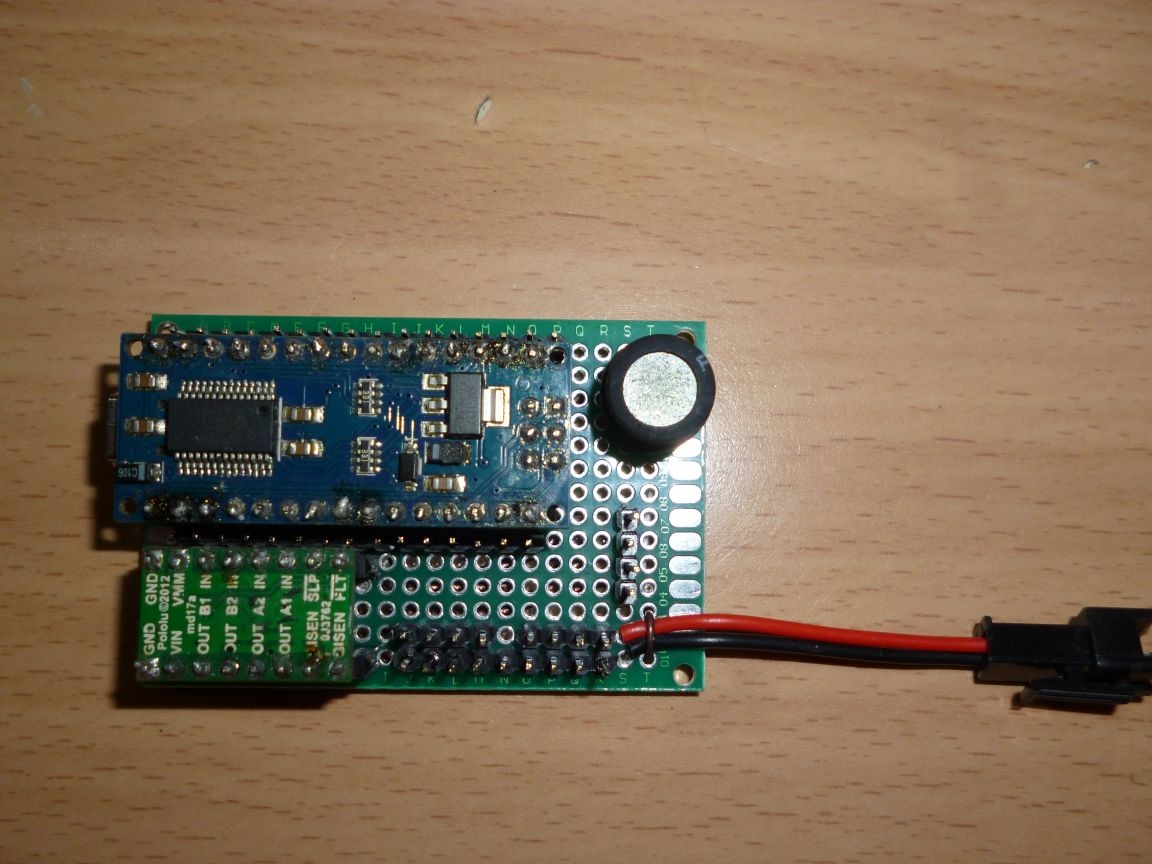
Nous installons Arduino Nano et DRV 8833 à leur place:
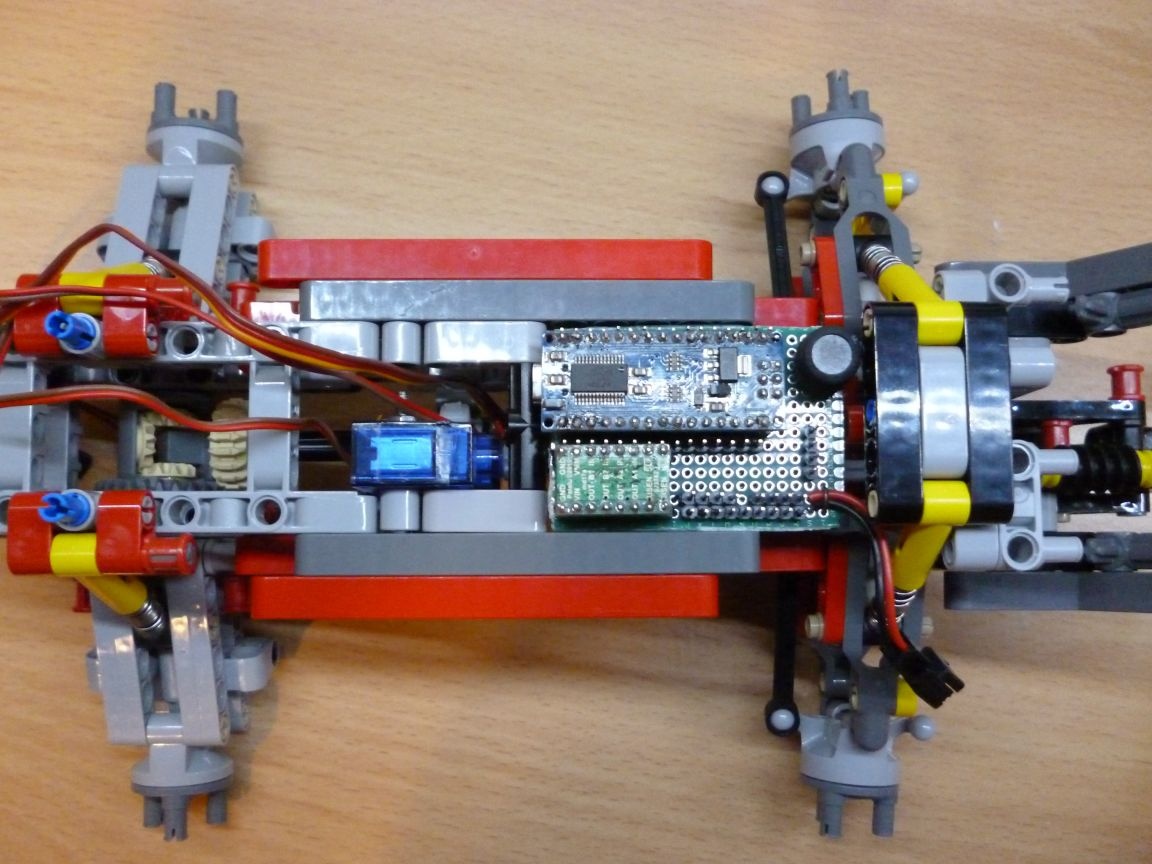
Et placez la carte sur le châssis:
Alimentation - 6 batteries Ni-Mn 1.2v 1000mA. Il faut les souder en série et les enrouler avec du ruban électrique. Collez du ruban adhésif double face à l'arrière du châssis.
Nous connectons l'ensemble de notre structure:
Étape 5 cabine
La cabine est personnellement mon improvisation, il n'y a pas d'instructions prêtes à l'emploi, vous devez donc collecter à partir de photographies.



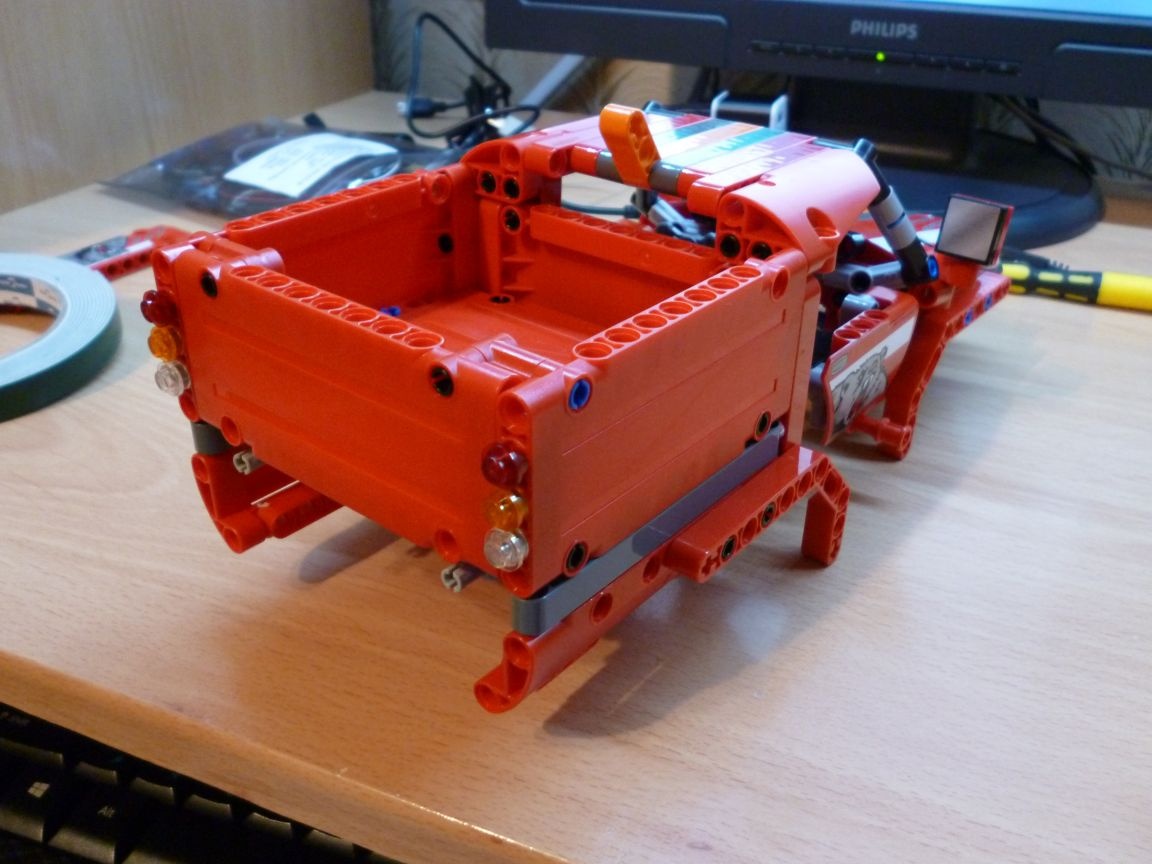
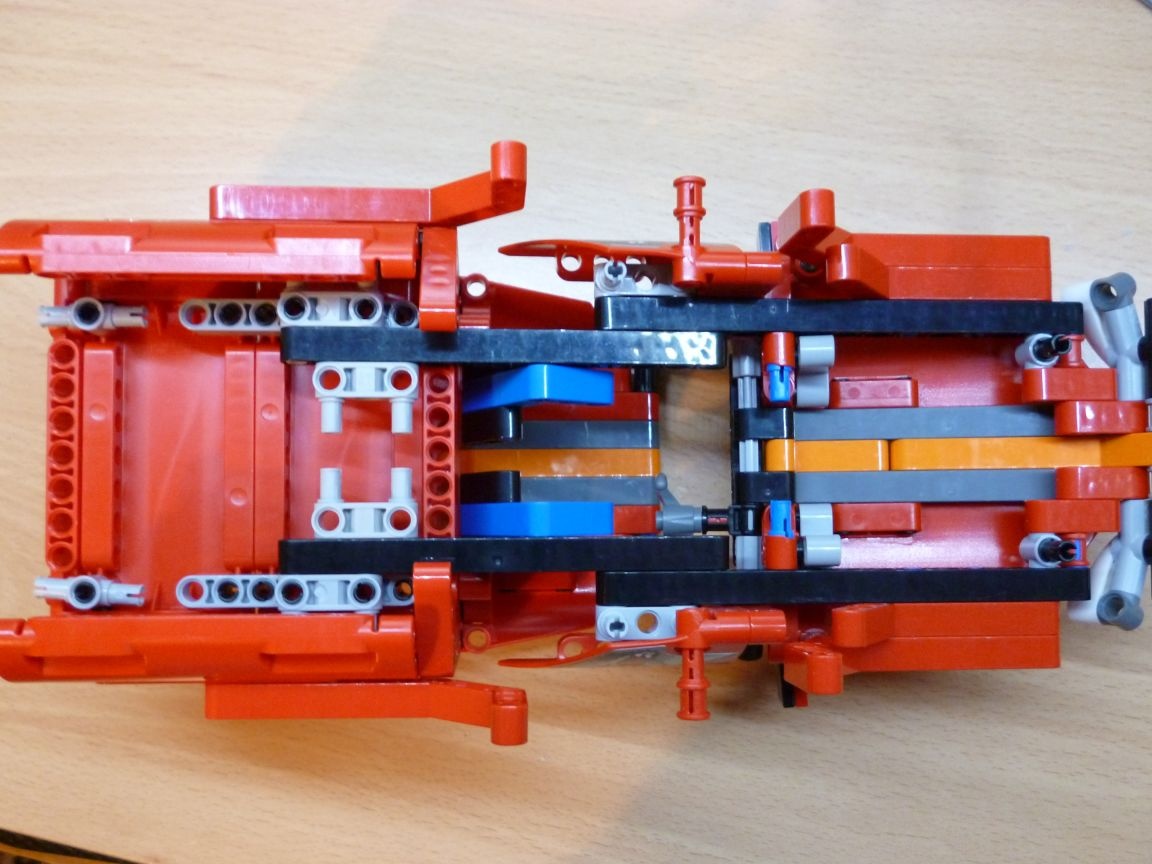
Vous pouvez assembler votre propre version, il vous suffit de la placer sous le châssis. L'essentiel ici est de faire correspondre le montage avec le châssis. Il y en a quatre et ils sont clairement visibles sur la photo depuis le bas de la cabine.
Étape 6 du firmware.
Aujourd'hui, cependant, comme toujours, je programme dans l'IDE Arduino. Vous devez d'abord remplir mon firmware et à travers le terminal, regardez les codes de télécommande que vous allez utiliser. Vous pouvez prendre n'importe quelle télécommande infrarouge, par exemple à partir d'un téléviseur, d'un lecteur DVD ou assembler le vôtre (j'ai une télécommande maison du joystick Sega). En appuyant sur un bouton, dans le terminal, nous verrons le code du bouton enfoncé, l'écrire sur un morceau de papier. Nous le faisons avec tous les boutons sur lesquels nous voulons programmer les actions. Modifiez ensuite l'esquisse. Nous y inscrivons nos codes pour les actions nécessaires et les clignotons à nouveau. Ce firmware est configuré sur ma télécommande joystick Sega. En jouant avec la machine, j'ai remarqué quelques nuances ou inconvénients. Il est difficile d'obtenir une réception fiable des commandes IR pendant le mouvement. Et cela se passe comme ceci: appuyez sur la flèche vers l'avant, la machine a reçu une commande pour aller, et s'est précipitée en avant, a relâché la flèche, mais elle n'a pas reçu de commande d'arrêt, et continue de conduire jusqu'à ce qu'elle se bloque ou se coince, elle est lourde de pannes. En partie, ce problème peut être résolu en augmentant le nombre de tentatives d'envoi d'une commande, cependant, cela n'est possible que lorsque vous utilisez la télécommande vous-même. Mais je choisirai une solution plus cardinale - je passerai à l'utilisation d'un émetteur-récepteur à 433 MHz. J'écrirai à ce sujet dans le prochain article.
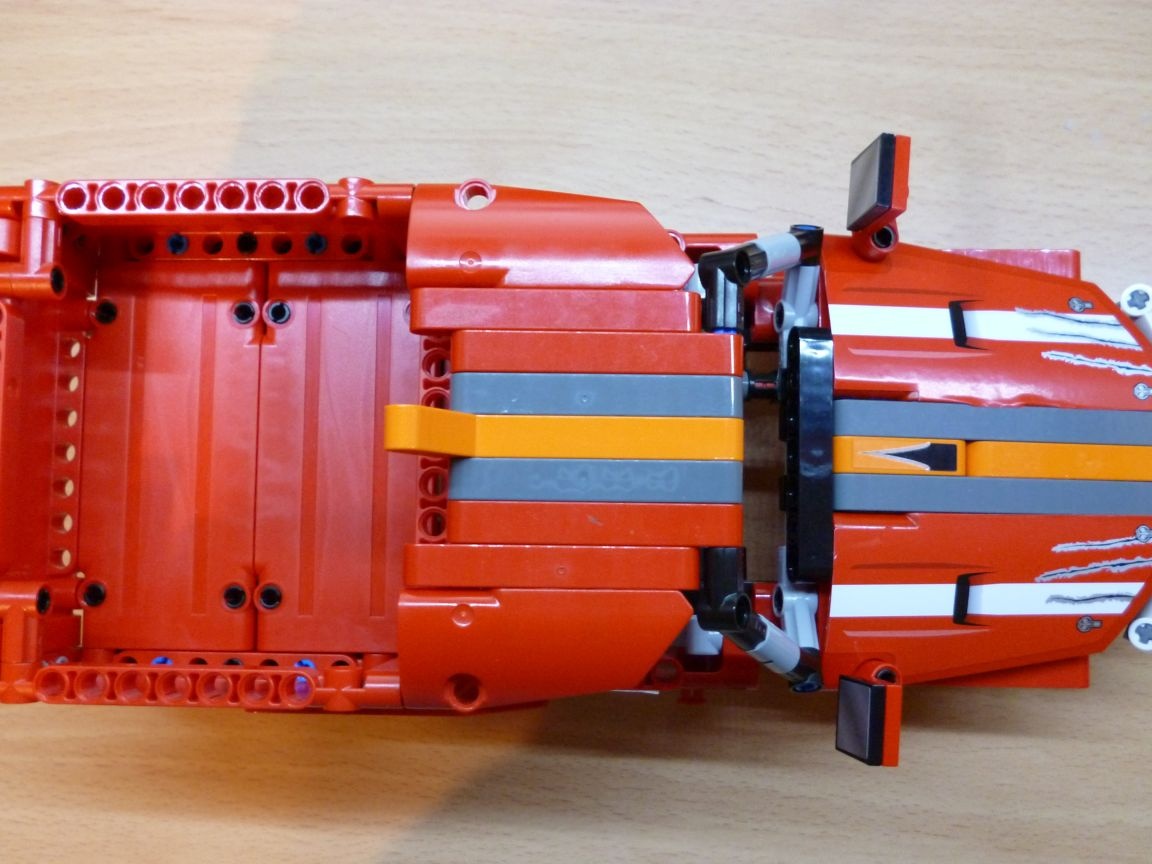
Étape 7 mettre sur roues.
Il suffit donc de mettre la cabine sur le châssis, de mettre les roues et de vérifier notre SUV en action.

