

Bonjour les amoureux d'Arduino! Sur Internet, j'ai vu un robot (ou appareil, plutôt intéressant et spectaculaire) qui "joue" le jeu Stak, en utilisant les mêmes principes de fonctionnement que vous pouvez faire un robot qui peut jouer à des jeux tels que géométrie, piano et autres où vous avez juste besoin Piquez dans l'écran avec une certaine séquence. Ce que j'ai fait, veuillez évaluer dans le sondage ci-dessous.
Si quelqu'un est intéressé, voici une vidéo du travail de ce robot:
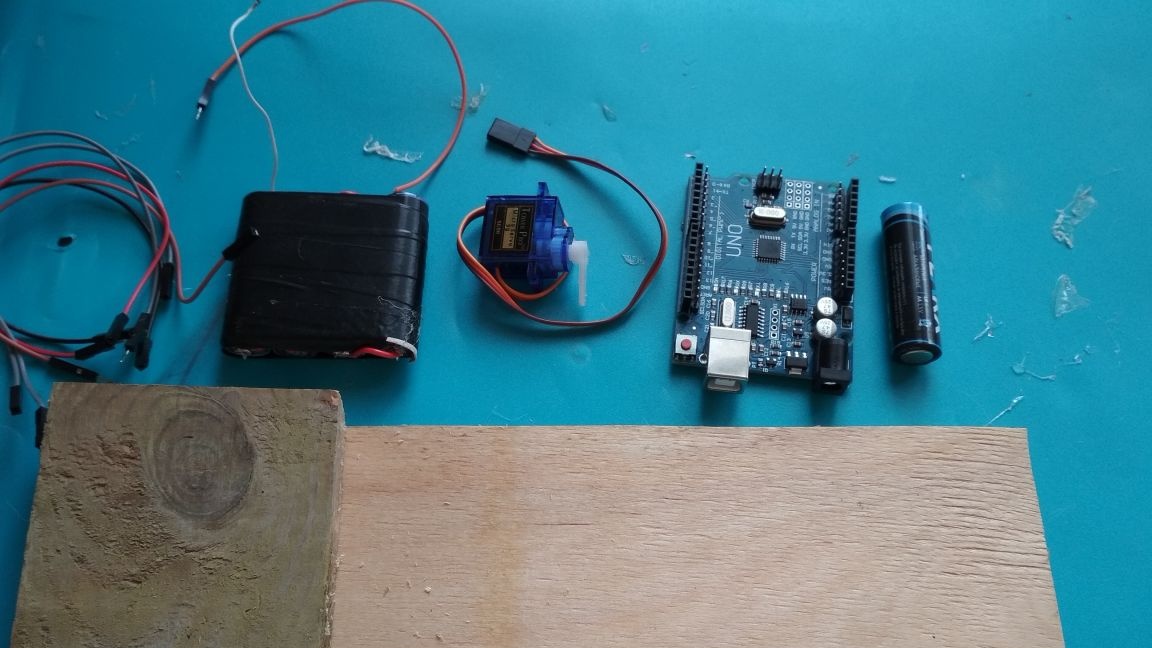
Et donc pour ce "robot" il nous faut:
paiement Arduino Uno
- fils de connexion comme "père-mère" ou "père-père"
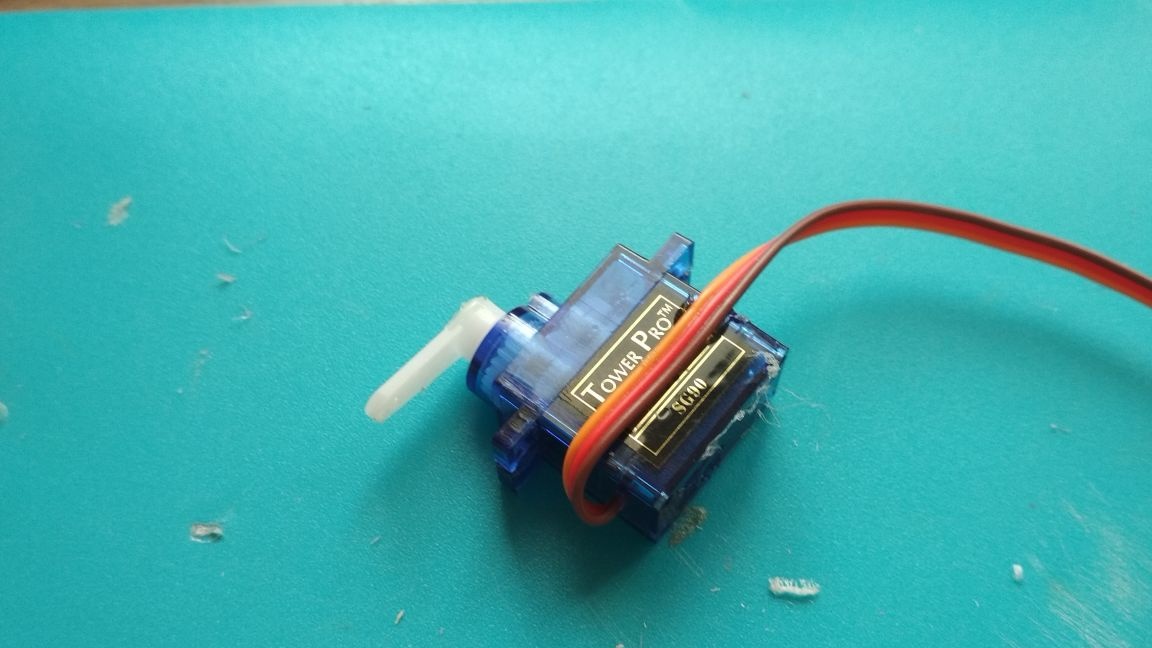
-service
- un morceau de contreplaqué
- un morceau de planche d'environ 1 cm d'épaisseur, l'essentiel est que deux fois plus épais que le contreplaqué
bâton de crème glacée
stylet
Feuille (s'il n'y a pas de stylet)
-batterie (s'il n'y a pas de stylet)
- alimentation pour 6-12 volts (j'utilise 4 piles digitales connectées en série)
Des outils dont nous avons besoin:
des ciseaux
colle thermique
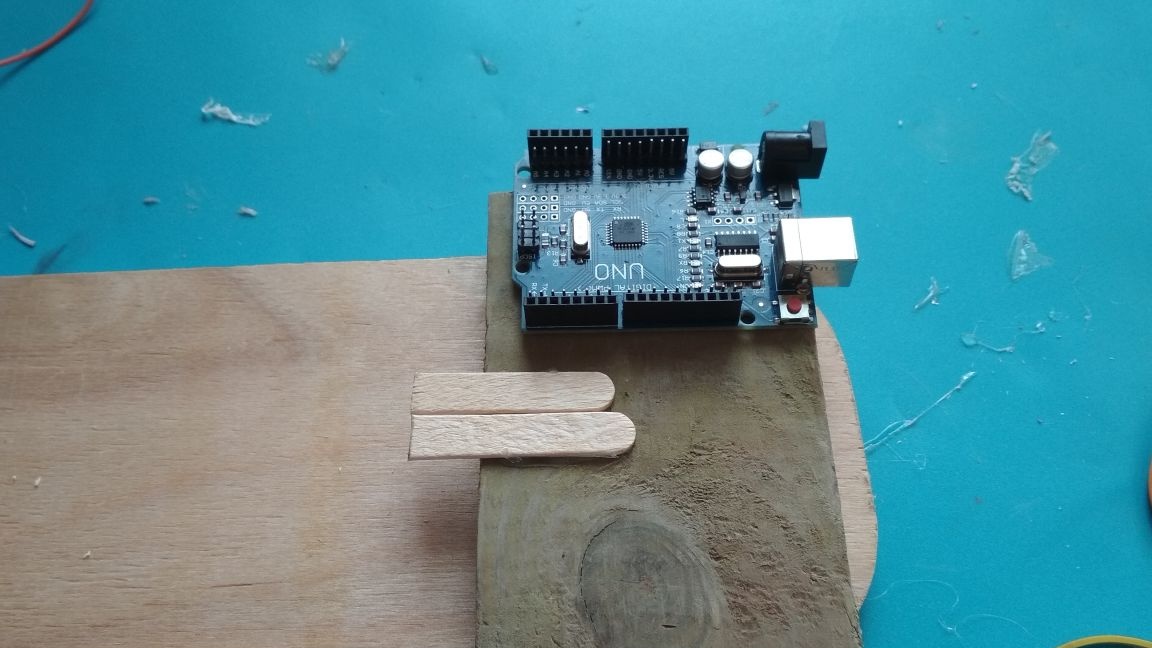
Et donc la première chose à faire est de couper un morceau deux fois plus grand que votre téléphone à partir d'un morceau de contreplaqué, vous pouvez plus grand, et vous devez couper un morceau de la taille de votre téléphone à partir de la planche (j'ai fait des tailles légèrement différentes, mais ce n'est pas critique du tout). Ensuite, nous collons nos blancs comme indiqué sur la photo:

Prenez le bâton de crème glacée et coupez-le en deux:

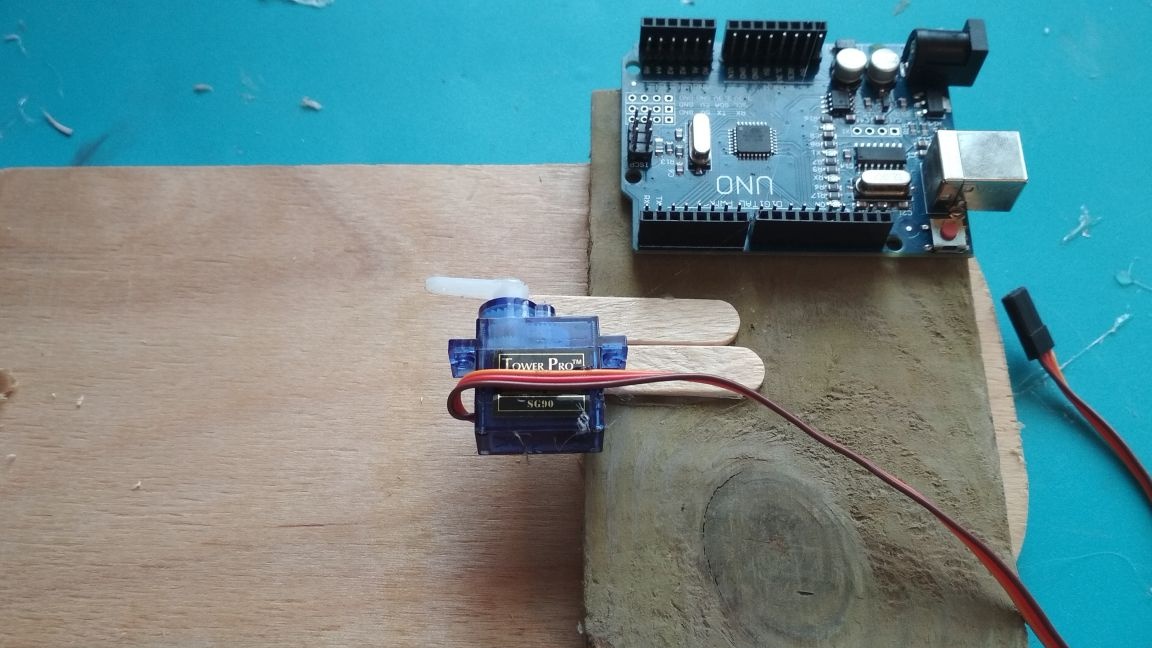
Collez-les au centre de la planche, du côté contreplaqué, comme indiqué sur la photo:

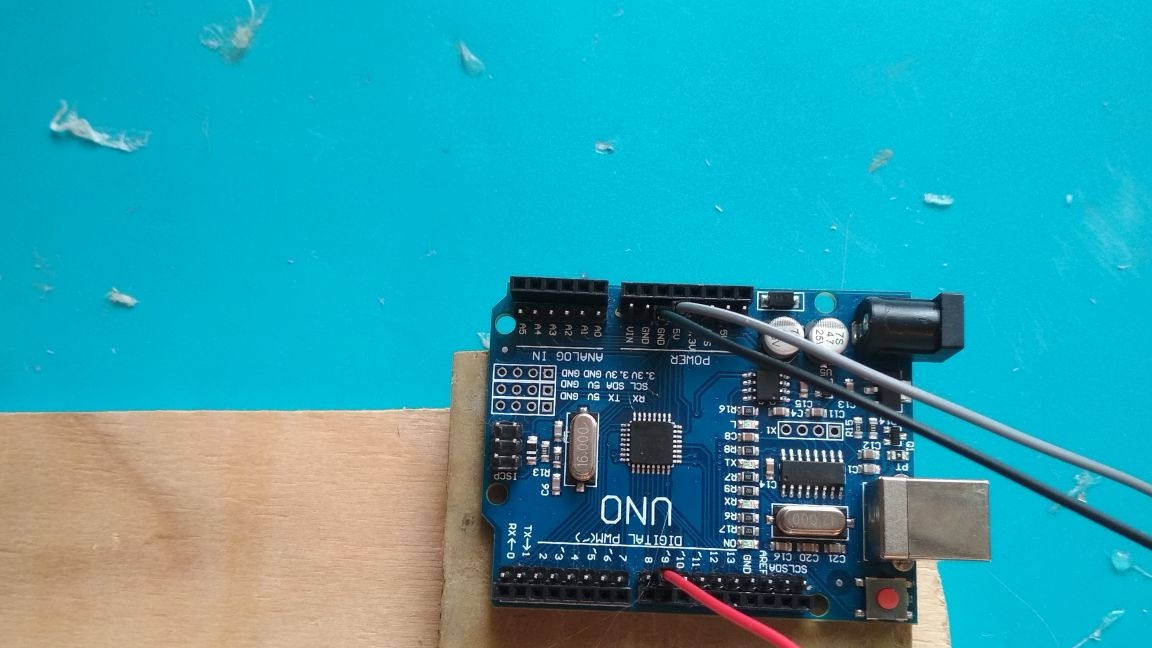
Nous collons la carte Ardino Uno depuis le bord de la carte:
Nous prenons le servomoteur et collons les fils pour qu'ils n'interfèrent pas:
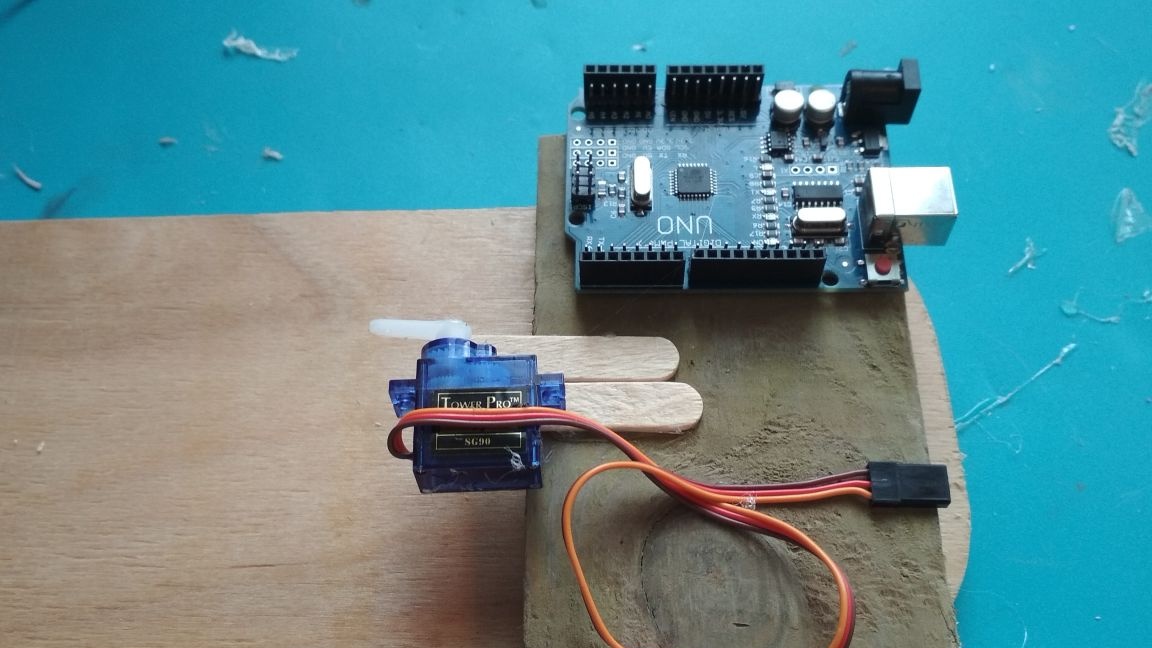
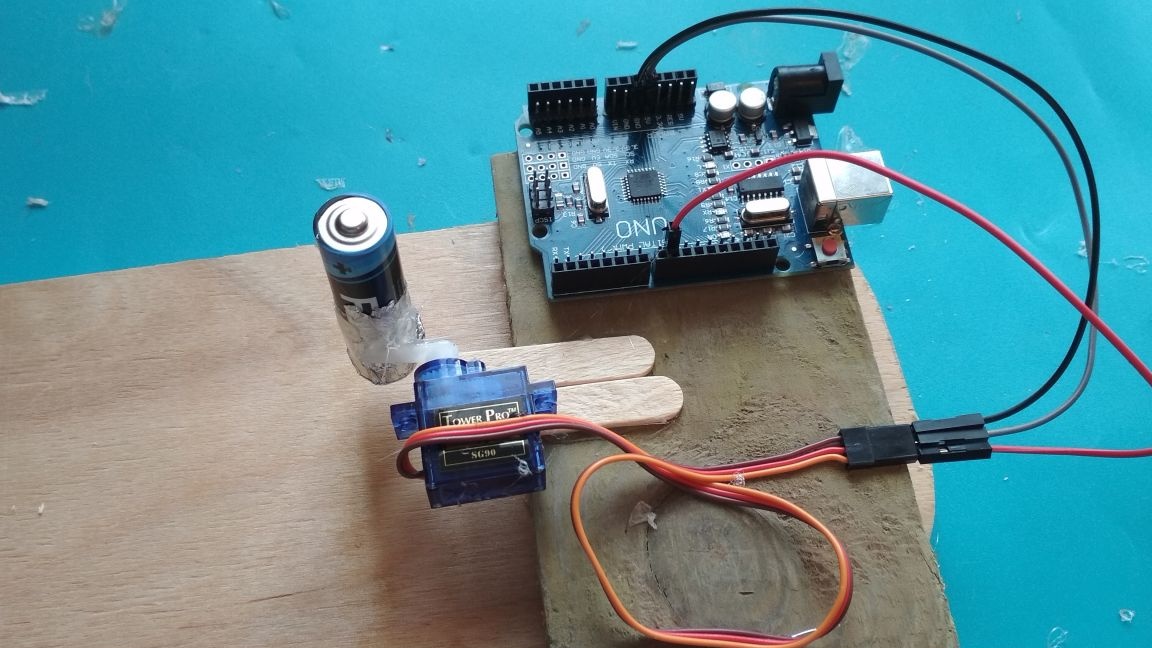
Collez le servomoteur à l'extrémité des moitiés des bâtonnets de crème glacée:
Nous posons les fils et collons la sortie du servomoteur au bord de la carte:
Ajoutez 3 fils papa-maman, de préférence de différentes couleurs, afin de ne pas vous confondre
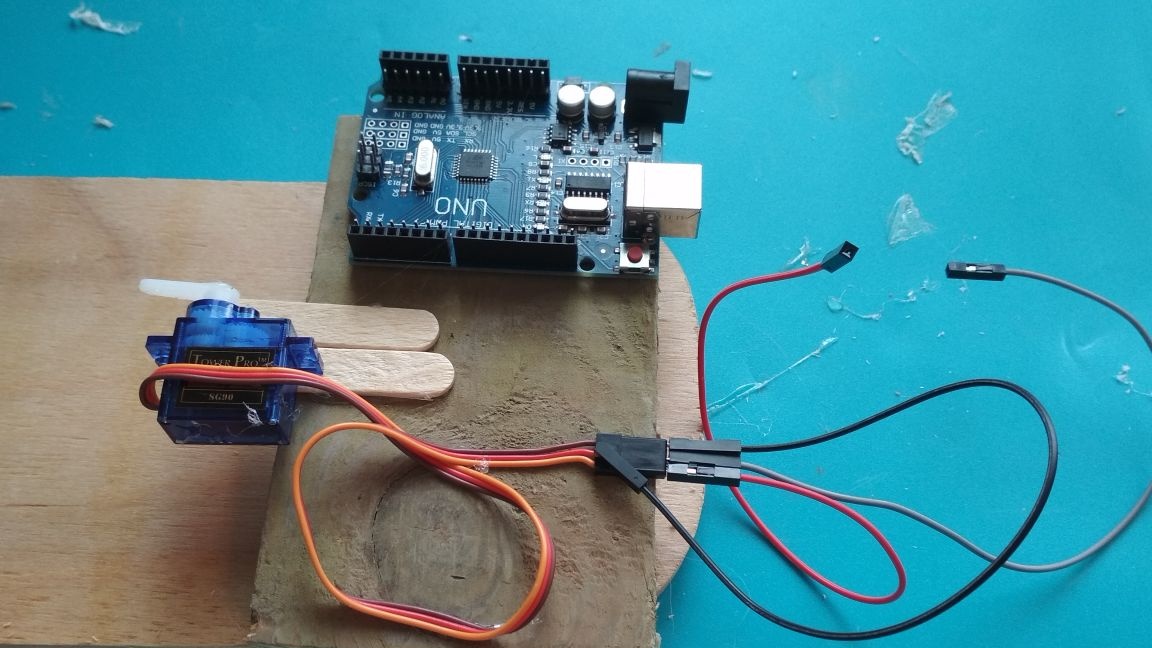
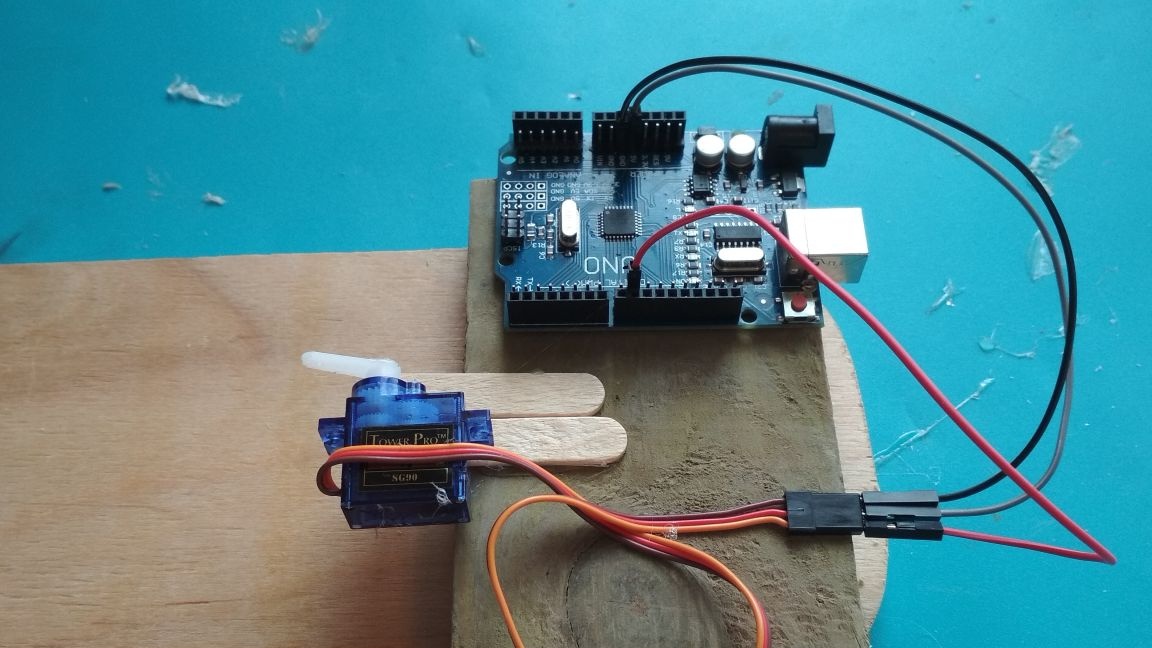
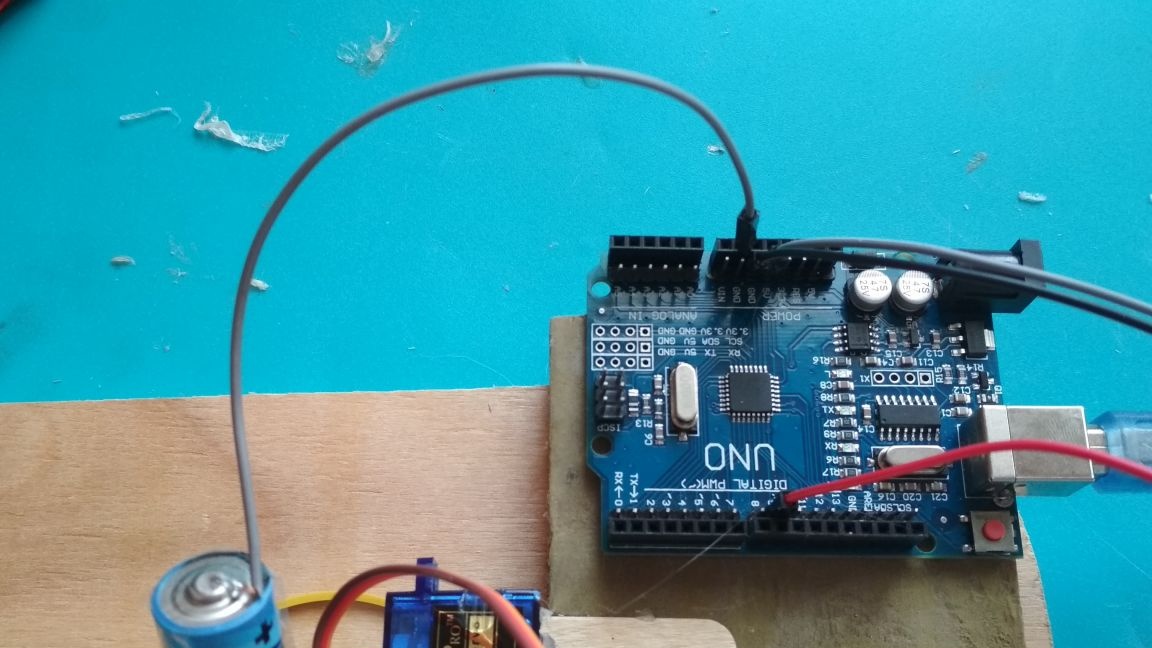
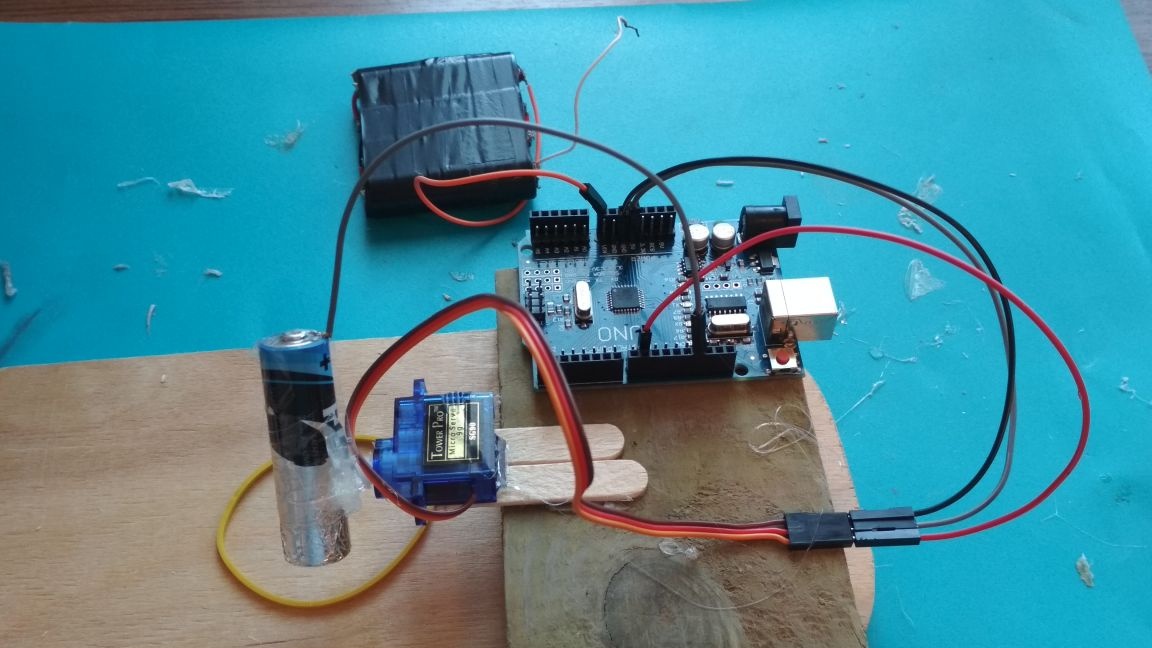
Nous connectons le servo variateur à la carte Arduino comme suit:
fil marron à gnd
-Fil rouge à 5v
- fil orange à 9 "pin numérique"
Si vous n'avez pas de stylet, comme le mien, alors ne désespérez pas, c'est très simple à faire.
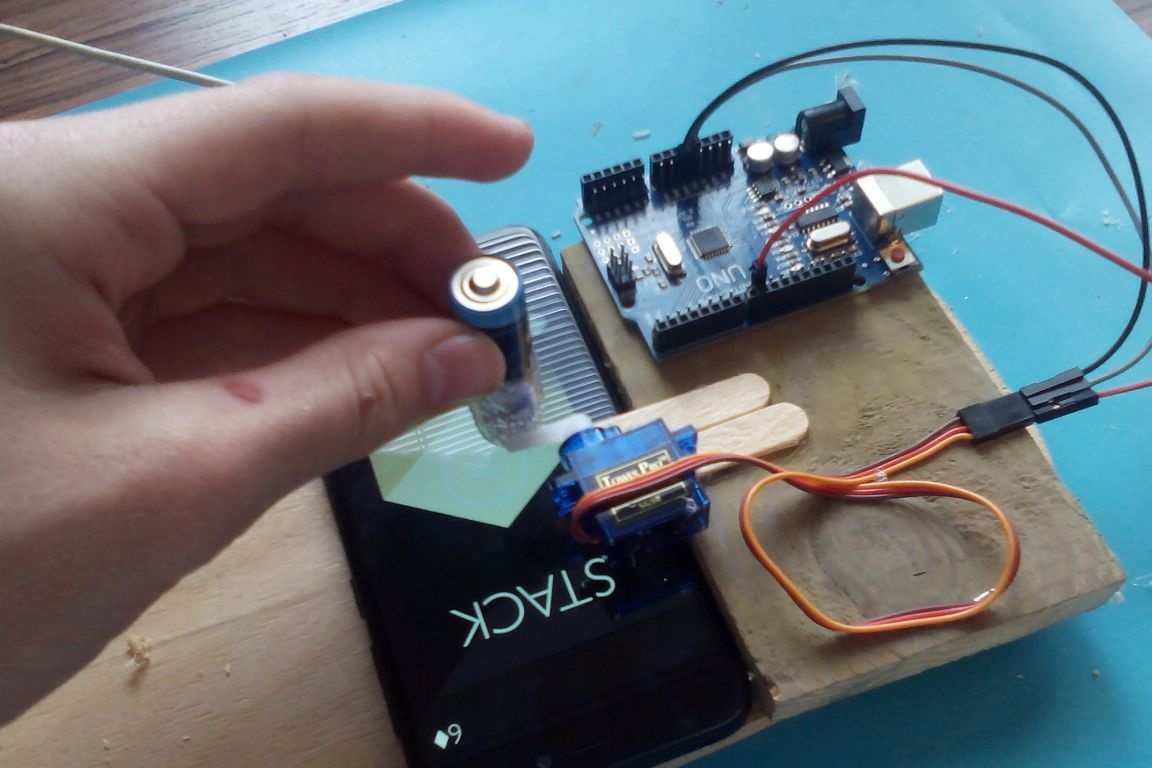
Nous prenons une pile de doigts ordinaire et le côté négatif aussi étroitement que possible, l'enveloppons de papier d'aluminium, puis nous la collons très étroitement:

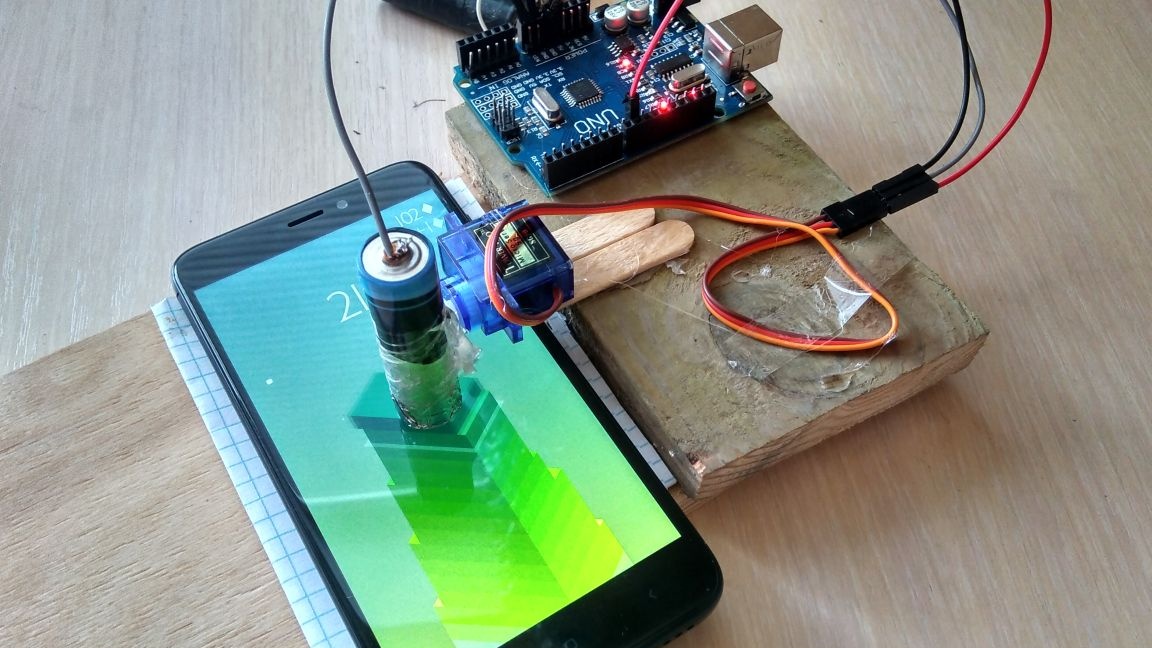
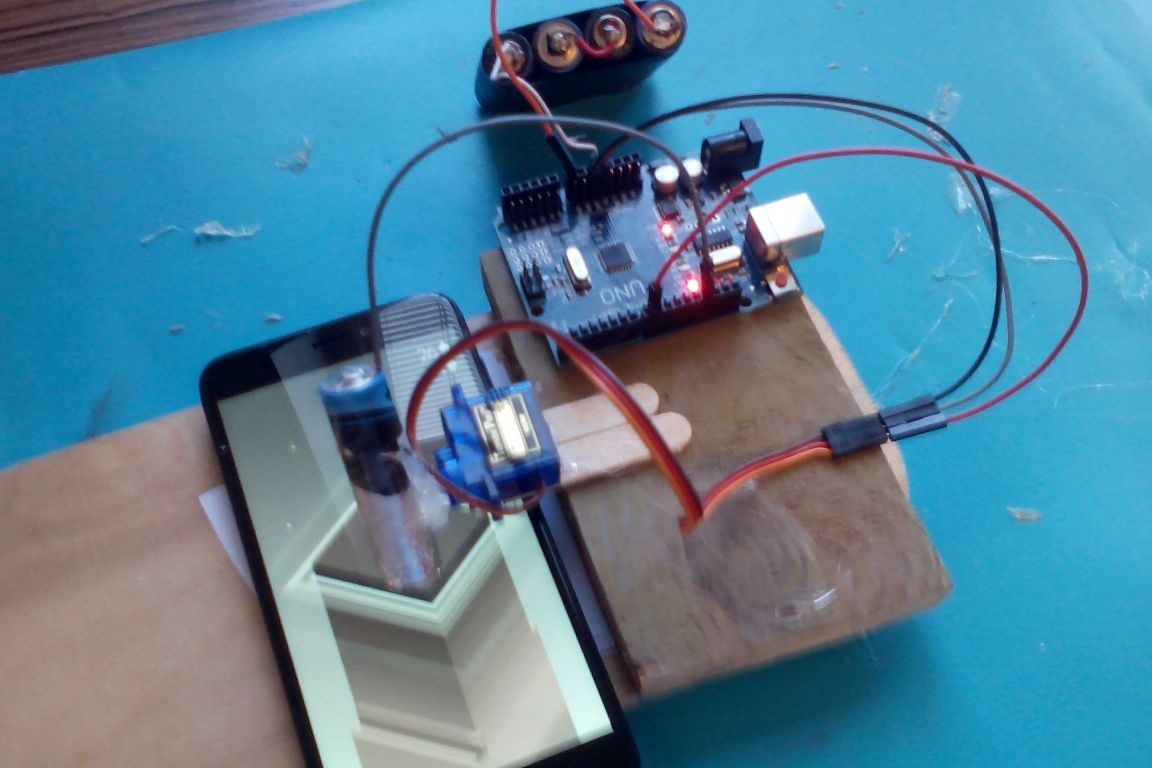
Maintenant, vous devez mettre le téléphone sur le contreplaqué sous le servomoteur, attacher la batterie sur le dessus et noter à quel niveau nous allons coller notre "stylet". Après avoir tout noté, collez fermement le «stylet» au levier du servomoteur, strictement à un angle de 90 degrés (le même angle devrait être lors de l'application du «stylet» au téléphone lorsque nous l'avons mesuré). Tout devrait fonctionner comme indiqué sur la photo:

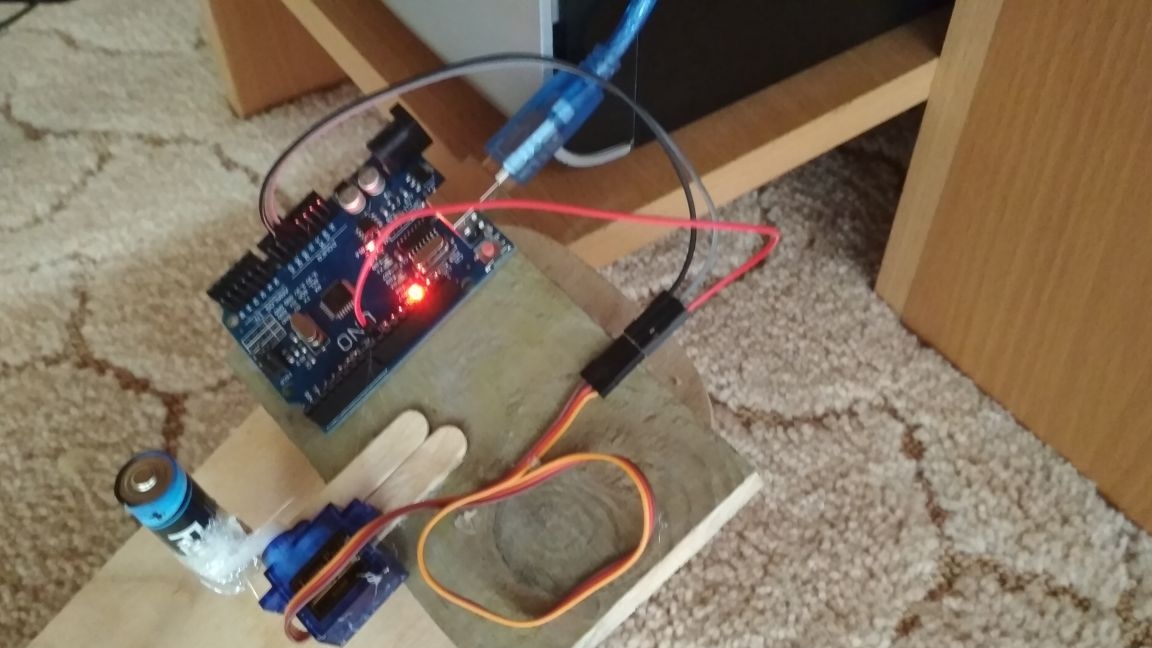
Maintenant, nous connectons notre "robot" à l'ordinateur via le port configuré dans l'IDE Arduino, exécutons l'IDE Arduino précédemment nommé et copions l'esquisse ci-dessous, puis cliquez sur le bouton "Télécharger". Si tout est fait correctement, l'esquisse se chargera sans erreur et après quelques secondes le servomoteur commencera son travail. Si vous avez des différences importantes dans les tailles du stylet et du servomoteur, faites ce croquis par vous-même, c'est assez simple.
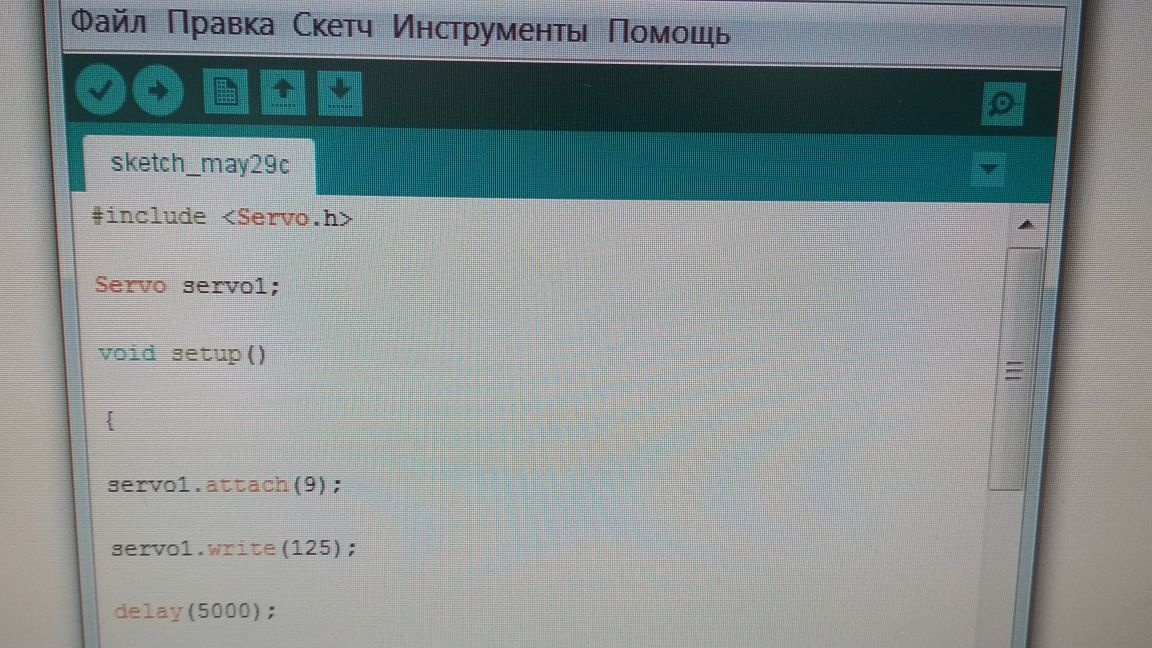
Voici un croquis:
#include
Servo servo1;
void setup ()
{
servo1.attach (9);
servo1.write (125);
retard (5000);
servo1.write (90);
retard (200);
servo1.write (125);
retard (750);
}
boucle vide ()
{
servo1.write (90); // 1
retard (200);
servo1.write (125);
retard (600);
}En utilisant du ruban adhésif ou du ruban électrique, nous enroulons le côté dénudé d'un fil de type «mère à mère» avec une sortie «mère» coupée vers le côté positif de notre «stylet» et sortons ce fil vers Gnd sur Arduino:
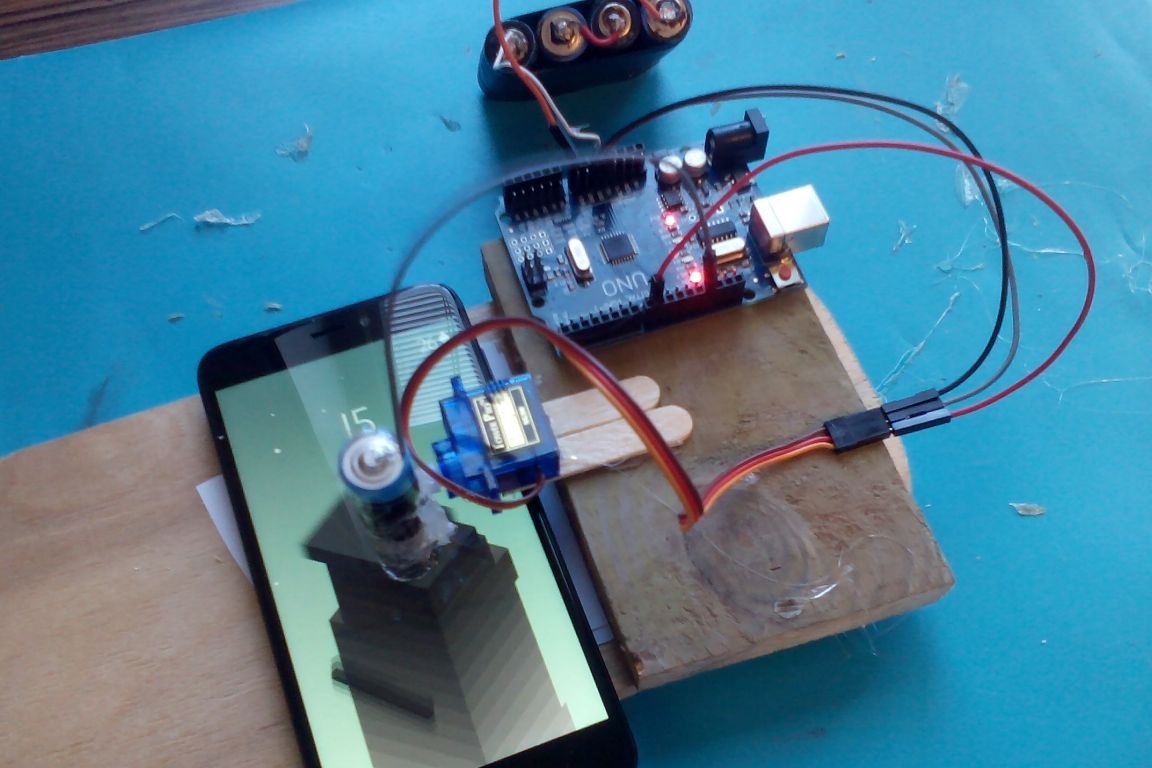
Eh bien, c'est tout! Notre simple le robot prêt et il ne reste plus qu'à le tester! Pour ce faire, placez le téléphone sous le stylet, lancez l'application Stak et placez le téléphone de sorte qu'il se trouve au-dessus du bouton "jouer", qui est indiqué par une flèche, nous connectons l'alimentation à l'arduino soit à l'aide d'un adaptateur spécial, soit nous sortirons le plus de notre "batterie" vers Uin sur Arduino, et moins au gnd. après avoir connecté l'alimentation, notre robot commence immédiatement à "jouer". Et bien que, du fait que je n'ai pas utilisé un stylet normal, mais une batterie, notre robot n'a pas souvent suivi le rythme et l'a raté, il "a joué longtemps".

Merci à tous pour votre attention!