

Ayant en stock tous les détails et les outils d'un tel robot, vous pouvez assembler en seulement 2 heures. Bien sûr, ces le robot Il ne remplacera pas un véritable aspirateur, mais vous serez agréablement surpris de la quantité de poussière qu'il peut recueillir sur un sol apparemment propre.
Matériaux:
- Arduino
- Module de contrôle moteur Motor-shield (H-Bridge)
- Deux moteurs à engrenages
- Une paire de roues
- Banque d'alimentation 5 volts ou autre source d'alimentation
- Turbine de refroidissement pour un ordinateur de 5 volts (pas un ventilateur)
- Aimants puissants
- Câble USB
- Câble d'alimentation pour Arduino
- Fils pour connecter les broches Arduino
- Carton épais
- pistolet à colle
- Un morceau d'étain (par exemple, à partir d'une boîte de conserve)
- Boîte en plastique (sert de bac à poussière)

Sur le carton, l'emplacement des pièces est déterminé approximativement et un cercle de taille appropriée est découpé (châssis de l'aspirateur).
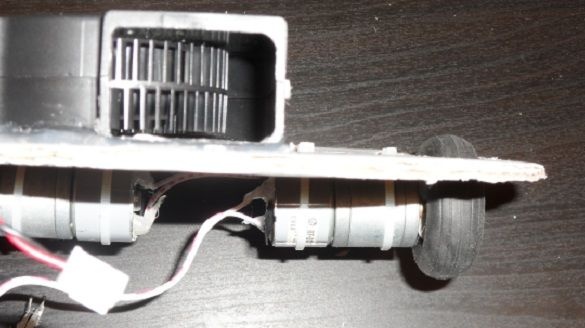
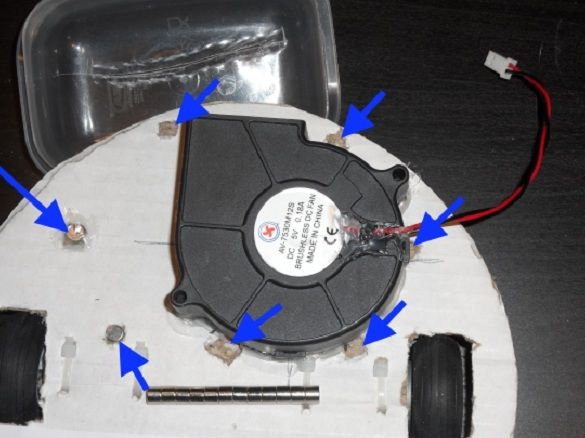
Au fond du futur robot, des trous sont percés sous les roues et sous la turbine. Les moteurs sont attachés au carton avec des attaches en plastique.

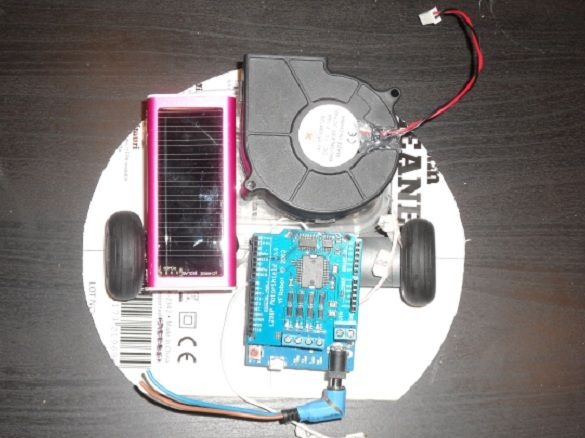
En outre, une turbine est fixée au châssis avec un adhésif thermofusible.
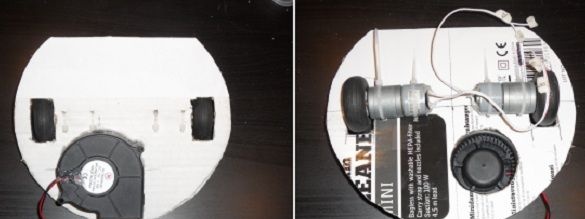
Il s'avère que la turbine est en haut du carton, les moteurs sont en bas.
Le contour de la boîte en plastique (qui collectera la poussière) est marqué sur la face inférieure, l'auteur fait des trous à travers ce contour et note l'emplacement des aimants. Les aimants maintiendront la boîte sur le châssis.
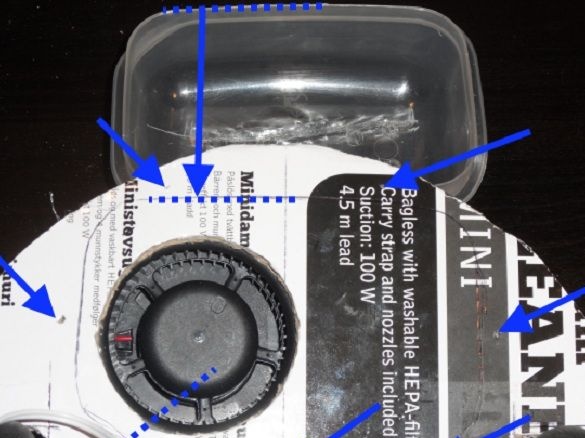
Sur le côté supérieur du châssis, les aimants sont collés aux emplacements précédemment marqués.
Maintenant, avec des aimants appliqués par le bas, pré-placez une feuille de papier sous eux.

Un bac à poussière est installé entre les aimants et collé sur eux.
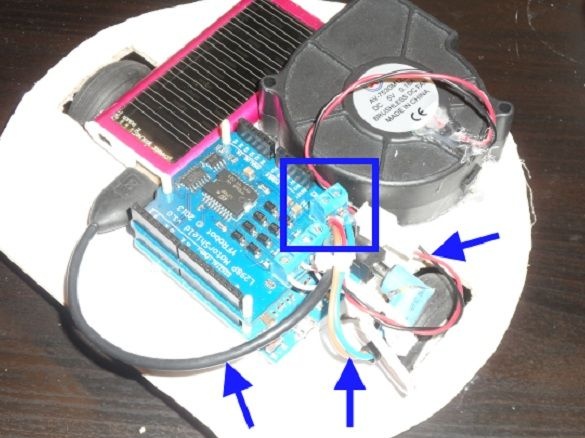
De plus, la batterie et les supports pour l'Arduino sont déjà collés sur le côté supérieur du carton. L'auteur utilise des morceaux de brochettes en bois comme attaches.

Vous pouvez maintenant installer le bouclier moteur et l'Arduino dans les supports. Les fils d'alimentation et l'Arduino sont coupés à la taille. Il est recommandé de souder et d'isoler les fils d'alimentation. Ensuite, ils sont connectés à l'Arduino, à la turbine, à la batterie et au moteur-bouclier.
À partir des bandes de carton existantes, les pare-chocs sont pliés et collés en demi-cercle.

Les pare-chocs sont collés sur les côtés du châssis. De plus, le châssis a été préalablement coupé un peu afin que les pare-chocs installés puissent y être écrasés en cas de collision.

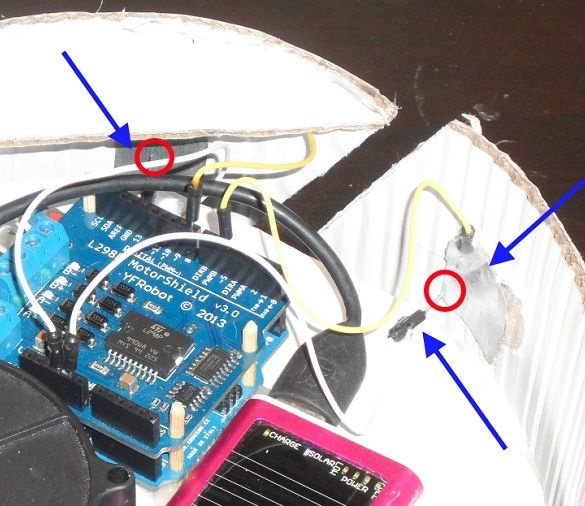
Ensuite, prenez deux conducteurs et connectez-les avec des morceaux d'étain avec de l'adhésif thermofusible.
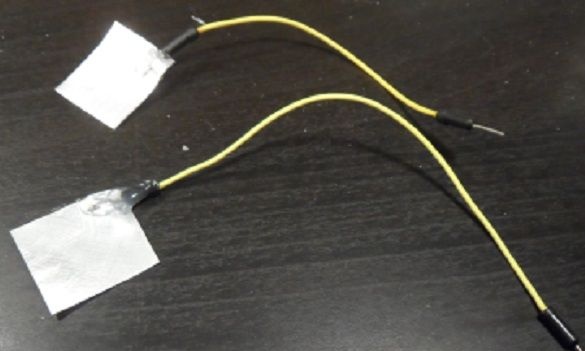
Des morceaux d'étain sont collés aux pare-chocs et leurs fils sont connectés à l'Arduino (aux broches 5 et 8). De plus, devant eux, la colle fixe les contacts de deux autres conducteurs qui se fixent aux contacts GND Arduino.
Un rectangle coupé d'une serviette de cuisine est utilisé comme filtre à poussière. Le filtre est placé en bas du châssis et fixé avec une boîte d'aimants.

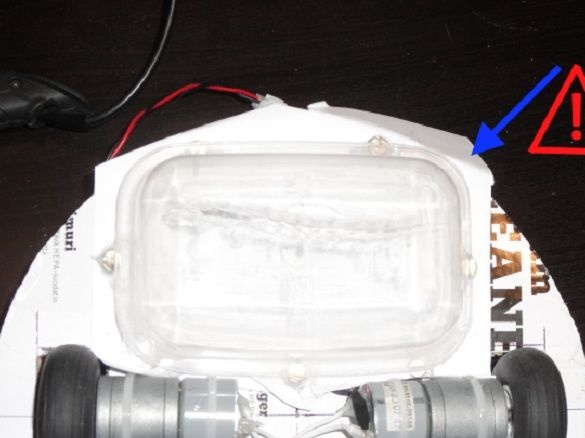
Dans la boîte, faites un long trou avec les bords incurvés vers l'extérieur. De plus, un support arrondi (morceau de plastique) est collé à la boîte de sorte que le bord du trou soit à 1 mm au-dessus du sol lorsque le robot est sur roues et repose sur le support. La hauteur de ce support contrôle la perméabilité du robot.

Les parois hautes du caisson peuvent être raccourcies par le collage d'aimants.

Programme pour bouclier moteur et Arduino
Exemple de fonctionnement de l'aspirateur: