


J'ai pris une partie de ma conception des instructions de montage du Lego Technic 42049. Le reste est mon improvisation. Pour la gestion, j'utiliserai un module Bluetooth connecté à un appareil Android ou un ordinateur.
Il nous faut donc:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- 2 pilotes de moteur L9110S
- 1 servo variateur SG-90
- Module Bluetooth HC-05 ou équivalent
- USB-UART pour le firmware Arduino
- Mini motoréducteur 50 tr / min
- Mini motoréducteur 100 tr / min
- Motoréducteur 6v 150 tr / min
- 2 LED
- 2 résistances 150 ohms
- Condensateur 10v 1000uF
- 2 peignes à une rangée PLS-40
- Inductance 68mkGn
- 6 batteries NI-Mn 1.2v 1000mA
- Connecteur papa-maman deux broches à câbler
- Homutik
- Fils de différentes couleurs
- souder
- Colophane
- fer à souder
- Boulons 3x20, écrous et rondelles pour eux
- Boulons 3x40
- Boulons 3x60
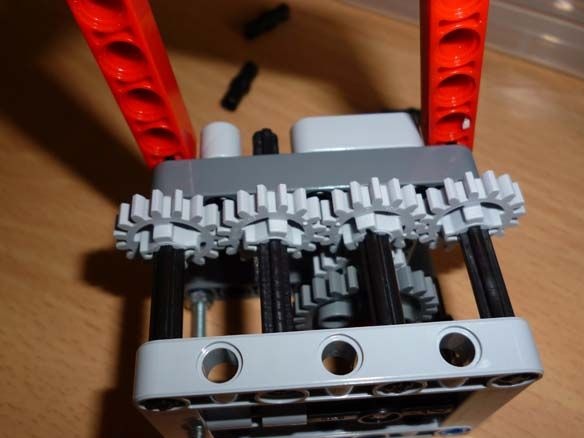
Étape 1 Assemblage de l'essieu arrière
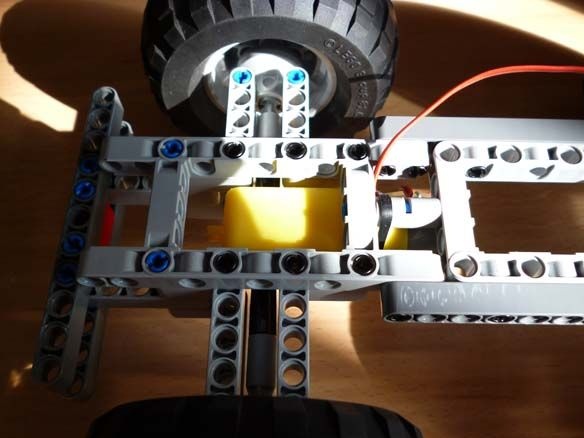
Pour le mouvement, nous utiliserons un motoréducteur avec un moteur 6 volts à une vitesse de 150 tr / min. L'axe de la boîte de vitesses doit être coupé des deux côtés et placé sur des pièces lego. L'essieu arrière est assemblé comme suit:
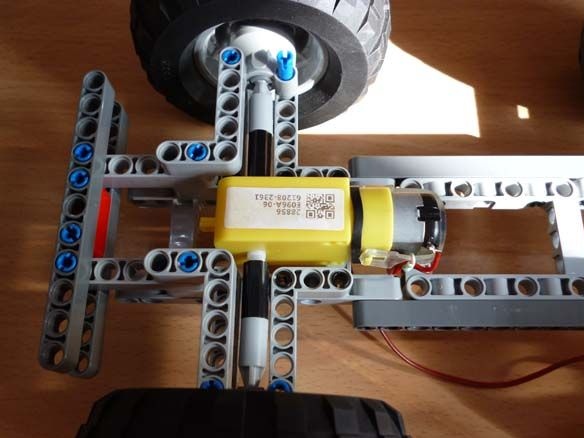
Et d'un autre côté:
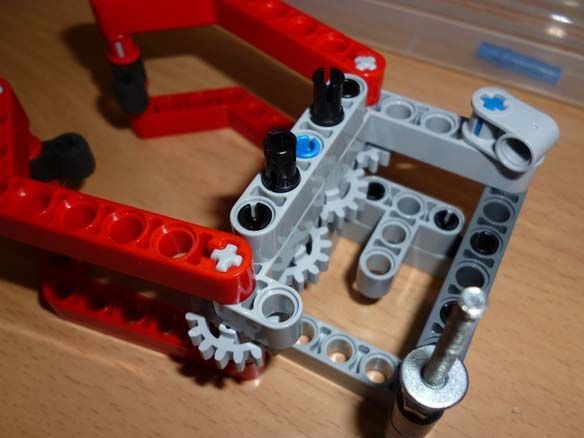
Étape 2 Assemblage de l'essieu avant
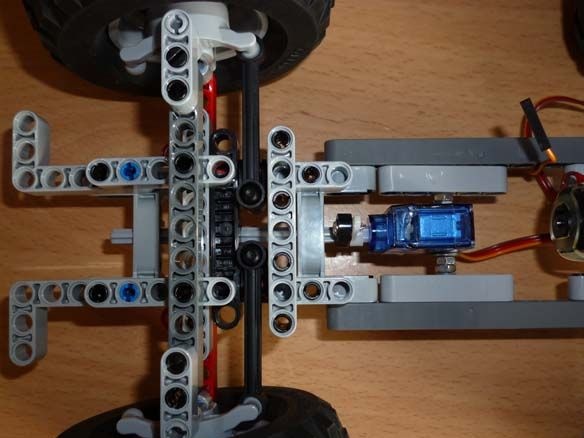
Pour la rotation des roues, le servo SG-90 est bien adapté. Pour le fixer sur notre modèle, il est nécessaire de percer soigneusement, afin de ne pas toucher les parties internes du servo, un trou traversant d'un diamètre de 3,2 mm ou tout simplement coupé avec un couteau à papeterie. Et également couper les parties saillantes («ailes» pour la fixation). Nous insérons un boulon dans le trou fait et le fixons avec des écrous. Sur l'arbre de servo, nous avons mis un levier avec une partie vissée de lego:

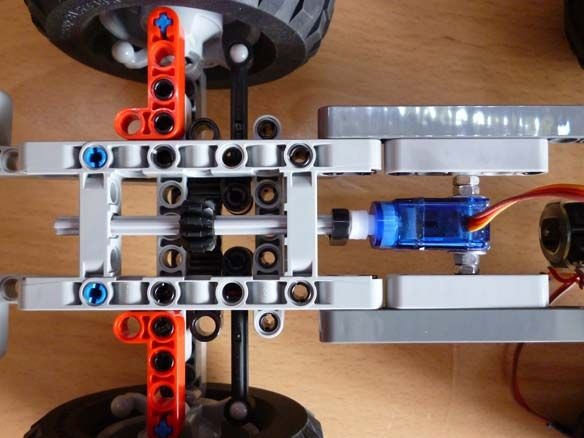
Et d'un autre côté:
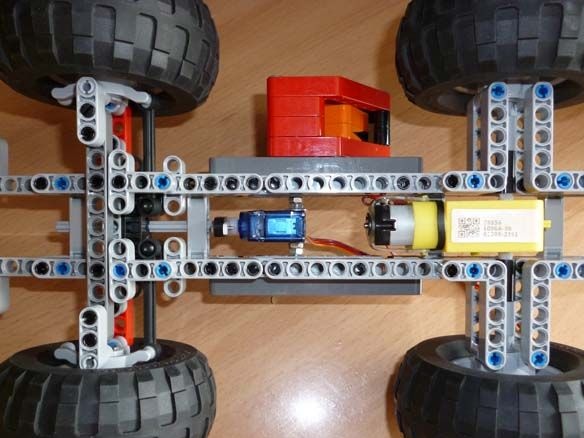
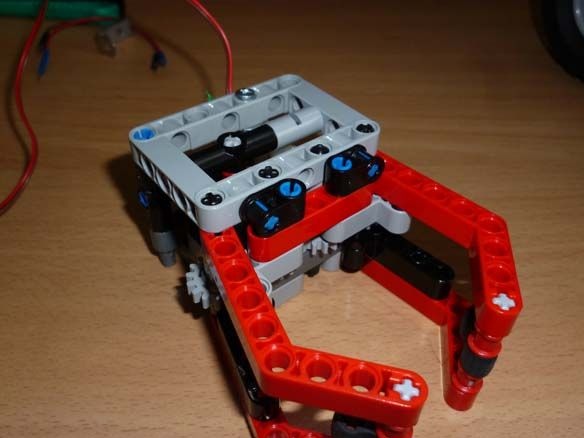
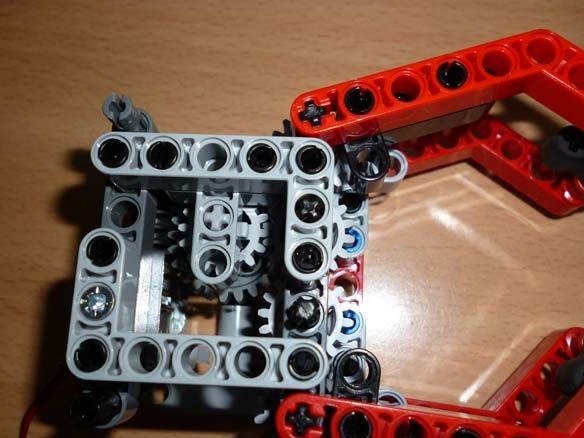
Étape 3 Assemblage de la base et de la cabine
Nous connectons les deux ponts comme indiqué sur la photo:

Nous assemblons la cabine (nécessaire pour la beauté):
Nous mettons la cabine sur la base de:

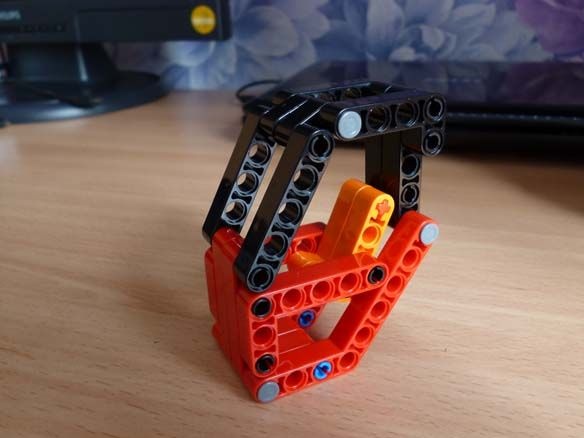
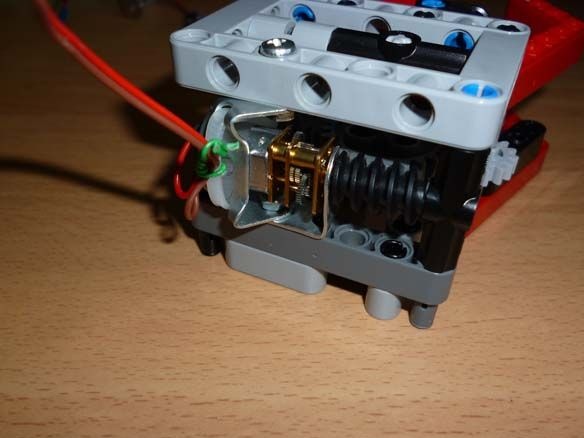
Étape 4 Mettre un capuchon ou une griffe
La griffe est entraînée par un mini moteur à une vitesse de 50 tr / min. J'ai résolu le problème de la connexion du motoréducteur avec les pièces du concepteur comme suit: j'ai mis un manchon de connexion sur l'axe du motoréducteur et inséré un morceau d'allumette pour la fixation. Pour le montage, le motoréducteur a utilisé du plastique métallique d'un concepteur de fer et une pince. Il s'est avéré ce qui suit:

Ensuite, nous récupérons la griffe elle-même sur la photo:

Nous le fixons à la base:
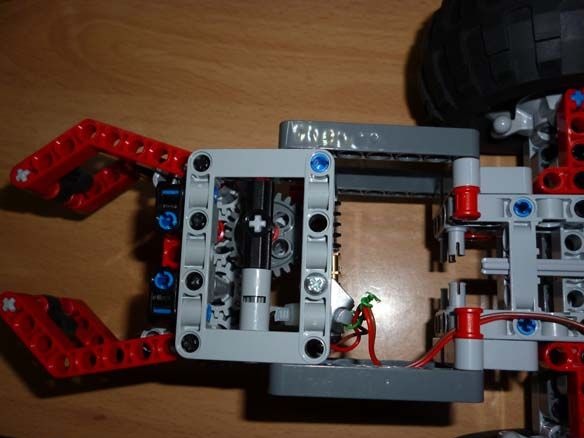

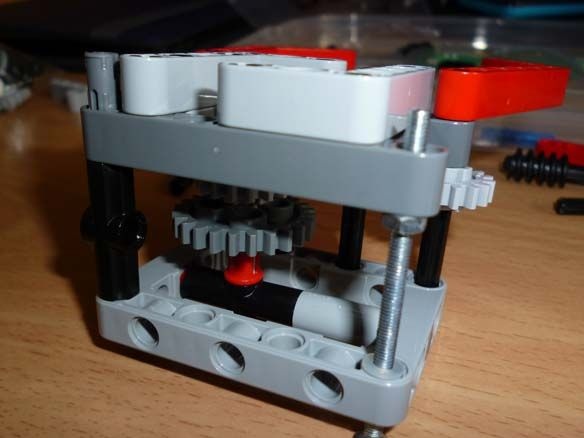
Une mini boîte de vitesses à moteur avec une vitesse de 100 tr / min convient pour soulever une griffe:


Étape 5 Électricien
Pour le contrôle, nous utiliserons l'Arduino Pro Mini et le module Bluetooth. Des pilotes de moteur sont nécessaires pour connecter les moteurs.
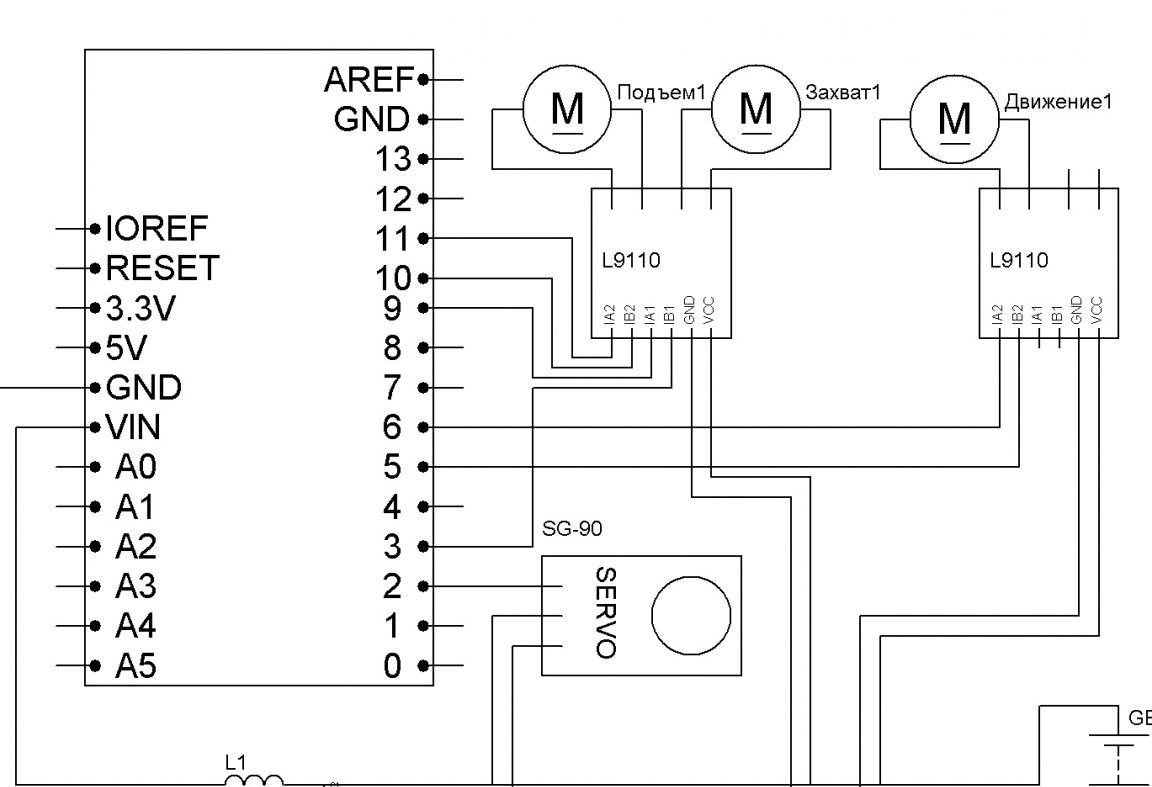
Connexion de tous les composants avec des fils mère-mère Dupont.Alimentation - 6 batteries NI-Mn 1.2v 1000mA connectées en série. Un condensateur de toute faible puissance, une inductance que vous trouverez également, vous devez stabiliser la puissance du microcontrôleur. Les anodes des deux LED sont connectées à Arduino 4 broches, les cathodes à GND. Les résistances sont sélectionnées pour les LED utilisées. Pour plus de commodité, enroulez les piles avec du ruban adhésif.

Nous collons le tout sur un ruban adhésif double face sur la base de:

Étape 6 Configuration Bluetooth
Les modules Bluetooth les plus abordables aujourd'hui sont les HC-05 et HC-06. Ils sont abondants dans les magasins en ligne chinois. Les différences entre eux sont que le premier peut fonctionner à la fois en mode maître (esclave) et en mode esclave (maître). Le second est un appareil purement esclave. En d'autres termes, le HC-06 ne peut pas détecter un appareil couplé et établir une connexion avec lui, il ne peut qu'obéir au maître.
Brève caractéristiques des modules:
- Puce Bluetooth - BC417143 fabriqué par
- protocole de communication - Spécification Bluetooth v2.0 + EDR;
- rayon d'action - jusqu'à 10 mètres (niveau de puissance 2);
- Compatible avec tous les adaptateurs Bluetooth qui prennent en charge SPP;
- La quantité de mémoire flash (pour stocker le firmware et les paramètres) - 8 Mbit;
- la fréquence du signal radio - 2,40 .. 2,48 GHz;
- interface hôte - USB 1.1 / 2.0 ou UART;
- consommation d'énergie - le courant pendant la communication est de 30 à 40 mA. La valeur de courant moyenne est d'environ 25 mA. Une fois la communication établie, la consommation de courant est de 8 mA. Il n'y a pas de mode veille.
Habituellement, les modules sont vendus comme deux cartes soudées ensemble. Le plus petit est un module d'usine, largement utilisé dans divers électronique appareils. Large - une planche à pain spéciale pour le bricolage. Il ressemble à une carte plus petite avec une puce BC417:

Et donc les modules DIY HC-05 et HC-06 eux-mêmes:
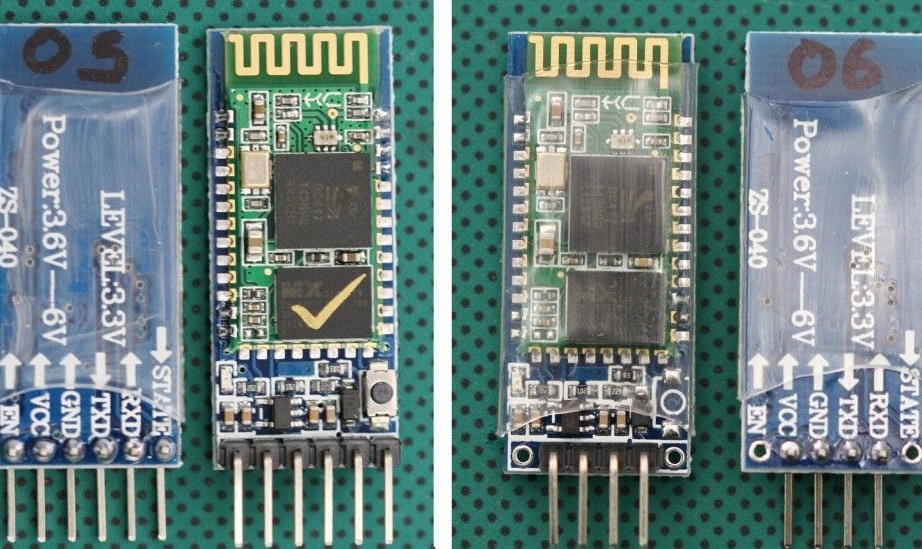
En principe, vous pouvez utiliser n'importe quel module que vous aimez. Un module sans carte d'essai coûte moins cher, mais vous devrez alors vous occuper de l'alimentation 3,3 V du module et vous tourmenter en soudant les fils au module. J'ai choisi l'optimale, à mon avis, dans le rapport prix / fonctionnalité HC-06.
Nous nous connectons comme suit:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
Pour un fonctionnement correct, le module doit être configuré. Nous allons configurer les commandes AT entrées dans la fenêtre du terminal. Je donne un exemple de configuration du module HC-05. Si vous avez un paramètre différent peut être différent. Pour que notre module reçoive des commandes, nous flashons d'abord l'Arduino avec le firmware suivant:
Dans ce cas, Arduino agit comme un pont entre les ordinateurs et le module. Dans le firmware, j'utilise la bibliothèque SoftwareSerial. À haute vitesse, il fonctionne de manière instable. Si vous voulez une vitesse élevée, vous pouvez connecter le module directement aux contacts Arduino RX et TX et réécrire le firmware. Mais dans mon cas, nous travaillerons avec le module à une vitesse de 9600. Donc après le firmware, ouvrez le terminal et entrez:
"AT" (sans guillemets) la réponse "OK" devrait venir (cela signifie que tout est correctement connecté et que le module fonctionne)
"AT + BAUD96000" (sans les guillemets) la réponse "OK9600" devrait venir.
Si vous avez la bonne réponse, passez à l'étape suivante.
Étape 7 Firmware
Pour écrire le firmware et le firmware lui-même, j'utilise l'IDE Arduino. La version actuelle pour aujourd'hui est 1.8. En fait le firmware:
Étape 8 Configurez votre téléphone.
Sur un téléphone Android, vous devez installer un programme pour contrôler le robot via Bluetooth. Il y en a beaucoup. Vous pouvez entrer «Bluetooth Arduino» dans Google Play et choisir à votre goût. J'ai aimé le BT Controller. Téléchargez et installez sur votre téléphone ou tablette Android. Ensuite, via les paramètres Android, vous devez établir une connexion avec notre module. Le mot de passe pour la connexion est «1234» ou «0000». Ensuite, configurez le programme pour les commandes appropriées. La liste est ci-dessous.
Étape 9 Configuration de l'ordinateur (si nécessaire)
Si nécessaire, ou simplement pour plus de contrôle, vous pouvez utiliser un ordinateur ou un ordinateur portable. Pour ce faire, l'ordinateur doit disposer de Bluetooth. Nous établissons la communication avec notre module via les commandes de l'ordinateur. Ensuite, nous avons besoin d'un terminal pour envoyer des commandes. Tout pratique pour vous. Après avoir enregistré le firmware, le contrôle est effectué par les boutons (commandes) suivants:
W - avant
S - arrière
A - gauche
D - à droite
F - arrêter
G - volant
K - phares
L - phare éteint
R - soulever
E - descente
Q - arrêter l'ascenseur
T - capture
Y - Libération
H - Stop Claw
Entrer constamment des commandes n'est pas pratique, je recommande donc d'utiliser le programme pour envoyer des commandes. J'utilise Z-Controller.Dans le programme, sélectionnez le port (port com via lequel la connexion est établie) et configurez les clés des commandes. Configuration inactive et intuitive.
