


Bonjour, aujourd'hui, je veux partager des instructions sur la fabrication d'un réservoir. Il y aura deux options pour le contrôleur interne: ESP -8266 et Arduino Pro Mini. Dans la première version, le contrôle s'effectue via les communications Wi-Fi. Dans le second - télécommande IR. Fabriqué sur la base du TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35), il est entraîné par un kit de boîte de vitesses à deux moteurs Tamiya 70097 et les moteurs fournis avec la boîte de vitesses.
Nous aurons besoin de:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- colle modèle (TAMIYA Cement par exemple)
- Kit de boîte de vitesses à deux moteurs Tamiya 70097
- ESP 8266 -12E ou Arduino Pro Mini 8 MHz 3,3 V
- stabilisateur de tension AMS 1117 3.3v 8000mA (si option avec ESP 8266-12E)
- Pilote moteur Qifei L9110
- condensateur 10v 1000uF
- LED bicolore (rouge, verte)
- LED bleue
- 2 LED rouges
- Récepteur IR
- photorésistance
- 2 compartiments pour 2 piles AAA ou 4 piles NI-MN AAA 1.2V 1000mA
- 2 résistances 2ohm
- 4 résistances 75 ohms
- 6 résistances 10 kOhm (si option avec ESP 8266-12E)
- bouton
- photorésistance
- USB - TTL
- fer à souder
- fils multicolores
Étape 1 Logement et mécanique.
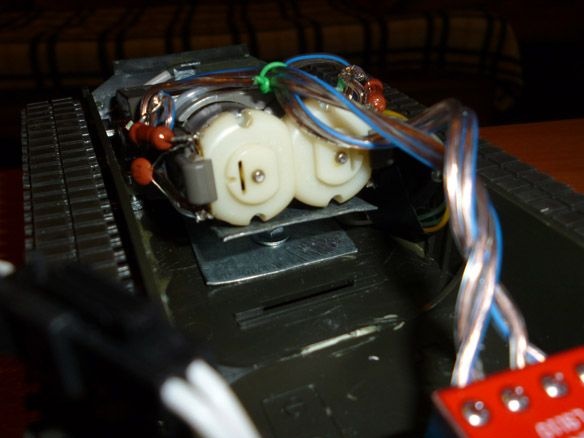
Vous devez d'abord collecter le modèle TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35). Nous collons la partie inférieure selon les instructions, à l'exception des parties recouvrant les ouvertures de sortie des arbres de boîte de vitesses. Les étoiles principales ne collent pas non plus. Collez la partie supérieure selon les instructions sans modifications. Après avoir collé tout cela, laissez sécher et procédez à la collecte de la boîte de vitesses. Comme le montrent les instructions, le Tamiya 70097 peut être assemblé en deux versions différentes.
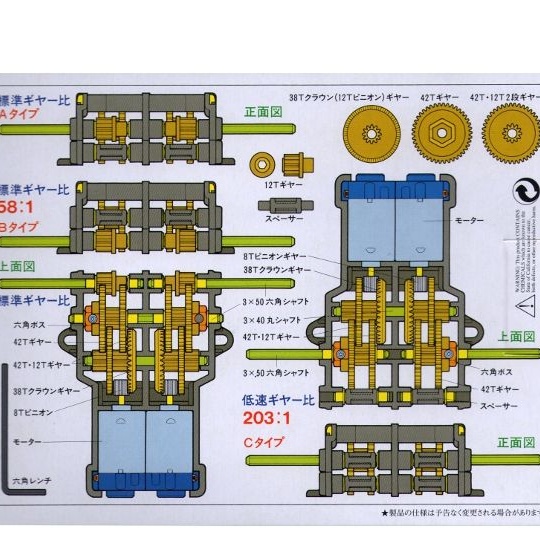
La première option avec un rapport de démultiplication de 58: 1, la seconde - 203: 1. Nous avons besoin de la première option. Et ici aussi, ce n'est pas si simple. Dans ce cas, la sortie de l'axe peut être plus proche du bas de la boîte de vitesses ou au milieu. Les axes doivent être expirés dans le trou central! Après avoir monté la boîte de vitesses, nous procédons à son installation sur le modèle. En théorie, tout devrait être simple, car à la fois le modèle et la boîte de vitesses d'une entreprise. En pratique - la boîte de vitesses devait être poussée là-bas. En position horizontale de la boîte de vitesses, les arbres des roues motrices se gonflaient vers le haut, j'ai donc dû couper une plaque métallique, ce qui a permis de fixer la boîte de vitesses dans la position souhaitée.

Les axes des boîtes de vitesses devront être coupés de 3 mm. Collez ensuite les roues motrices dessus.

Dans la partie supérieure plus près de l'arrière, nous faisons des trous pour une LED bicolore et un récepteur IR.

Plus près de l'avant se trouve un trou pour une LED bleue qui servira de lampe de poche.

Et à l'intérieur de la trappe - pour une photorésistance.

Au verso, collez les LED rouges pour l'éclairage.

Pour tout ce qui précède, vous devez souder les fils. Il est plus pratique de le faire avant l'installation.
Étape 2 Électricien
Ici, je fournirai un choix d'options pour un assemblage ultérieur.
Si vous avez choisi ESP 8266. Le module Wi-Fi intégré facilite grandement le processus de contrôle et de connexion.Il peut être facilement programmé dans l'IDE Arduino. Il est préférable de choisir un module avec 4 Mo de mémoire. Dans ce cas, il est nécessaire de collecter le faisceau minimum pour démarrer et flasher l'ESP-8266. Seule la broche VCC est connectée directement à l'alimentation, les broches restantes: CH_PD, RESET, GPIO0, GPIO2, doivent être tirées sur l'alimentation (VCC) via une résistance. Les résistances de 10kOm peuvent être remplacées par d'autres, de 4,7kOm à 50kOm, sauf pour GPIO15 - sa valeur doit aller jusqu'à 10k. Directement, au moins (GND) de l'alimentation, nous connectons uniquement GND, et nous tirons également le GPIOO à travers la résistance à 10kOm, pour mettre le module en mode de téléchargement du firmware, à GND. Le bouton est nécessaire pour redémarrer et flasher le module. Connecteur USB-TTL - pour le firmware.
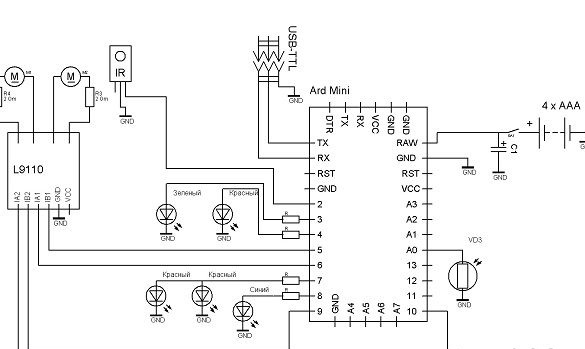
Voici un schéma
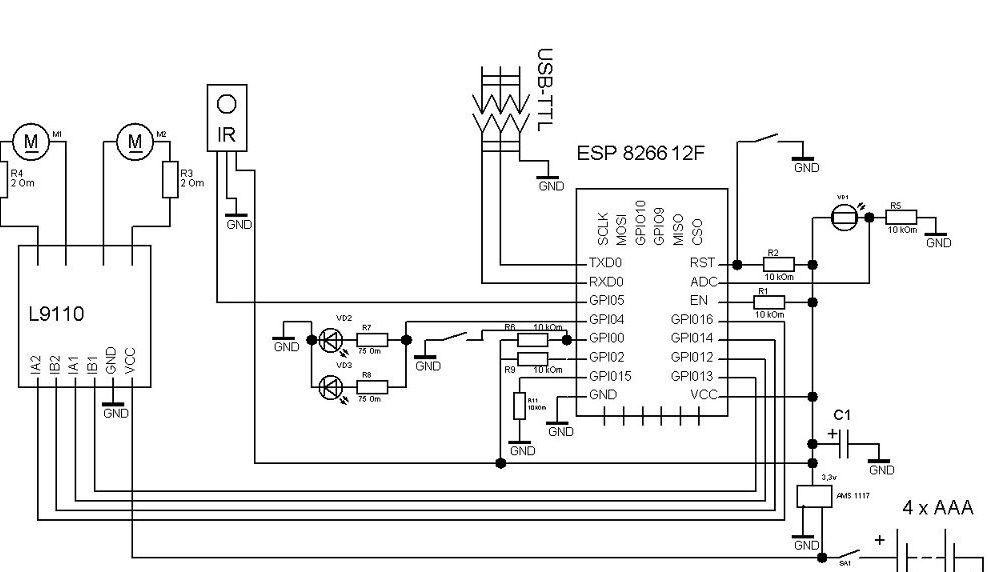
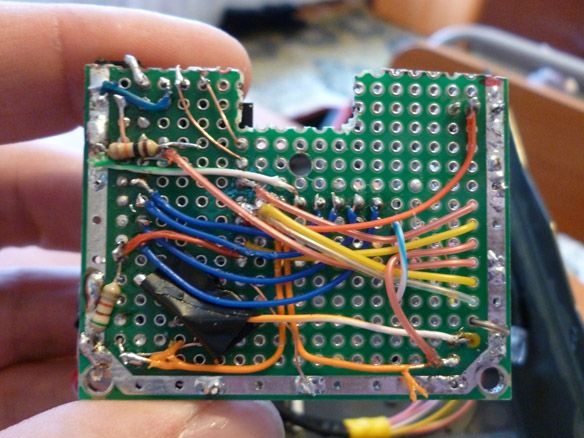
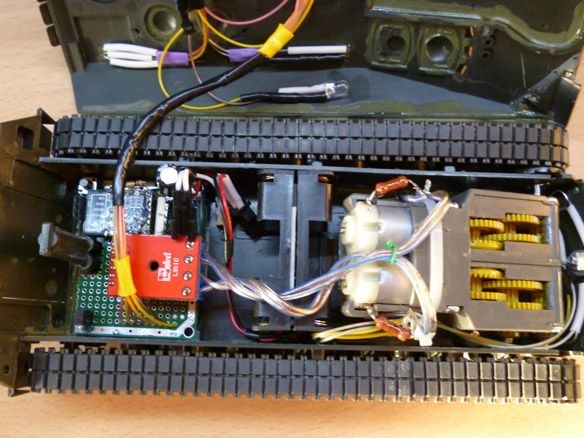
Je vais expliquer un peu, les LED bleues et deux rouges sont nécessaires pour le rétro-éclairage (il est visible et beau dans l'obscurité), la photorésistance est connectée à l'ADC du contrôleur et est nécessaire pour déterminer l'éclairage (lorsque le rétro-éclairage devient sombre). Résistances de rappel de 10 kOhm, 75 Ohm pour les LED, limiteur de courant de 2 Ohm pour les moteurs (sans eux, en essayant de se déplacer, le contrôleur est surchargé). Nous soudons tout selon le circuit sur la carte de circuit imprimé. Pour l'alimentation, vous pouvez utiliser 4 "petites" piles ou quatre piles de taille AAA, soudées en série. Nous collons deux compartiments de deux batteries avec du ruban adhésif double face et nous connectons en série. Les compartiments à piles et les accumulateurs sont placés entre la boîte de vitesses et la carte de circuit imprimé.

Si votre choix s'est porté sur l'Arduino. Seul Arduino Pro MINI rentre à l'intérieur. Cela vaut la peine de choisir une carte de 3,3 volts, car les moteurs sont conçus pour 3 volts, et vous ne voulez pas alimenter séparément les moteurs et l'Arduino. Arduino est plus facile. L'ensemble du faisceau du contrôleur et du régulateur de tension sont déjà sur la carte elle-même. Il reste à dessouder la prise Arduino et le pilote du moteur sur la carte de circuit imprimé.

Étape 3 Préparation de l'environnement de programmation.
Pour modifier le firmware et remplir le croquis dans ESP, vous devez installer l'IDE Arduino à partir du site officiel de Arduino.cc, ainsi que l'installation du module complémentaire pour ESP via Boards Manager. Pour ce faire, démarrez l'IDE Arduino, puis Fichier - Paramètres - dans le champ URL du gestionnaire de cartes supplémentaires, insérez le lien
http://arduino.esp8266.com/package_esp8266com_index.jsoncliquez sur OK (vous pouvez saisir plusieurs liens séparés par une virgule dans ce champ). Next Tools - Board - Boards Manager, entrez esp8266 dans le champ de filtre et cliquez sur ESP8266 par ESP8266 Community Forum. Cliquez sur Installer et attendez la fin du téléchargement. Il ne reste plus qu'à sélectionner la carte - Generic ESP8266 dans le menu Outils et régler la fréquence de votre module sur 80 ou 160Mhz, la taille de la mémoire flash et sélectionner le port série auquel l'adaptateur USB-TTL est connecté.
Pour Arduino, installez simplement l'IDE Arduino à partir du site Web officiel Arduino.cc.
Étape 4 Firmware
Il reste à éditer l'esquisse et à la remplir d'ESP.
Dans le champ "String _ssid =" ";" entre guillemets indique le point d'accès auquel vous souhaitez vous connecter.
"String _password =" ";" est le mot de passe de ce réseau.
"String _ssidAP =" Mardella ";" le nom du réseau que l'ESP lèvera s'il ne se connecte pas au réseau existant.
"String _passwordAP =" 12345678 ";" - le mot de passe du réseau que l'ESP lèvera s'il ne se connecte pas au réseau existant.
"String SSDP_Name =" Mardella ";" Nom SSDP
Après le démarrage, ESP essaie de se connecter au point d'accès spécifié dans l'esquisse, en cas de succès, vous devez déterminer l'adresse IP de notre robot et vous connecter à cette adresse via un navigateur. Vous pouvez également passer par un ordinateur à l'infrastructure réseau, y trouver notre réservoir et double-cliquer pour vous y connecter. Si la connexion échoue, l'ESP devient le point d'accès. Ensuite, l'accès peut être obtenu en se connectant à un nouveau point d'accès et en entrant 192.168.1.1 dans le navigateur.
L'interface Web se compose de deux pages. Le premier à contrôler. Le second est pour la personnalisation. Sur la deuxième page, vous pouvez spécifier le point d'accès auquel vous souhaitez vous connecter, ainsi que le nom du réservoir et le nom et le mot de passe du point d'accès que l'ESP soulève. Toutes les modifications prennent effet après un redémarrage. Vous pouvez également redémarrer le module via l'interface Web.
Pour Arduino, vous devez modifier tous les champs «results.value». Après avoir écrit les codes IR de la console que vous allez utiliser là-bas.

Vidéo du char: