
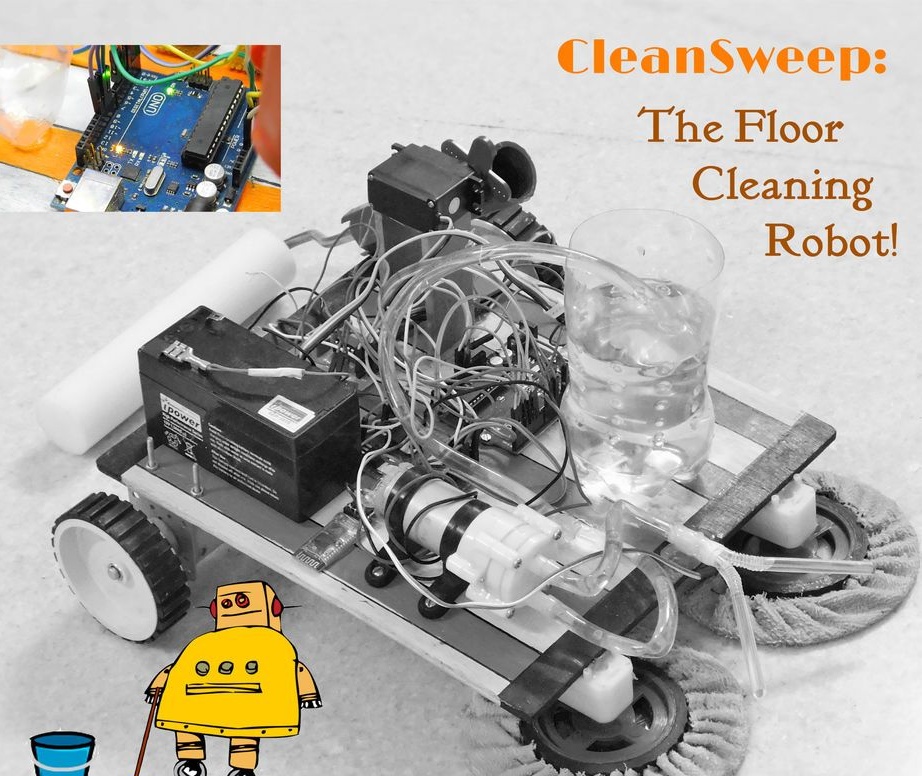
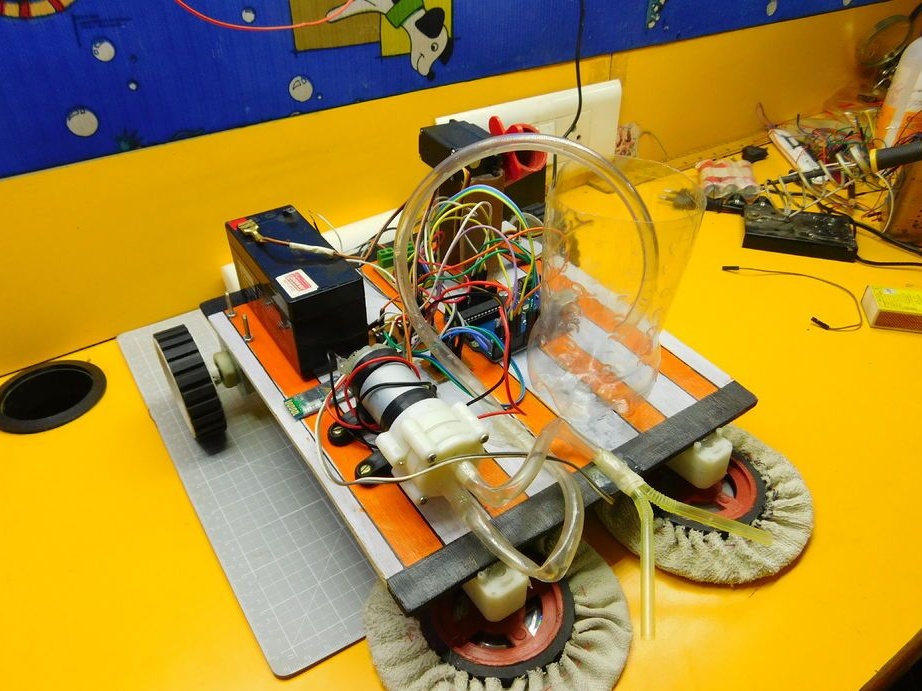


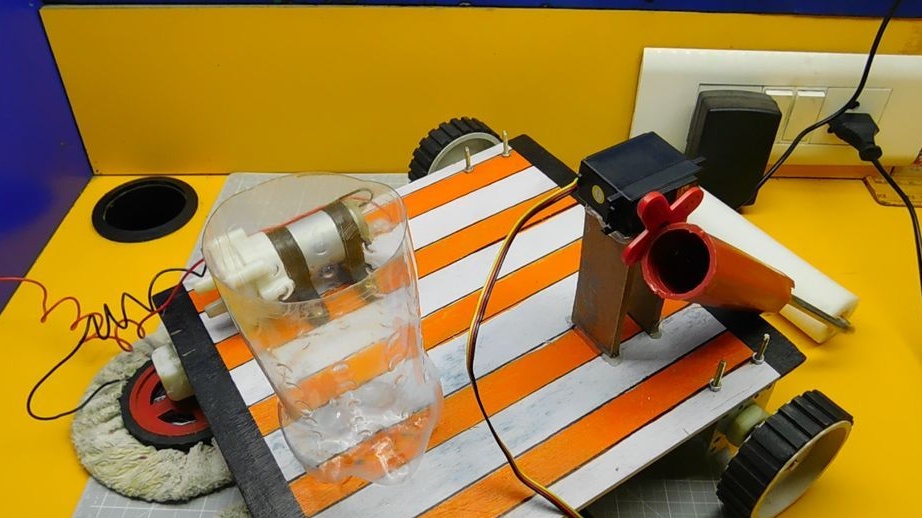
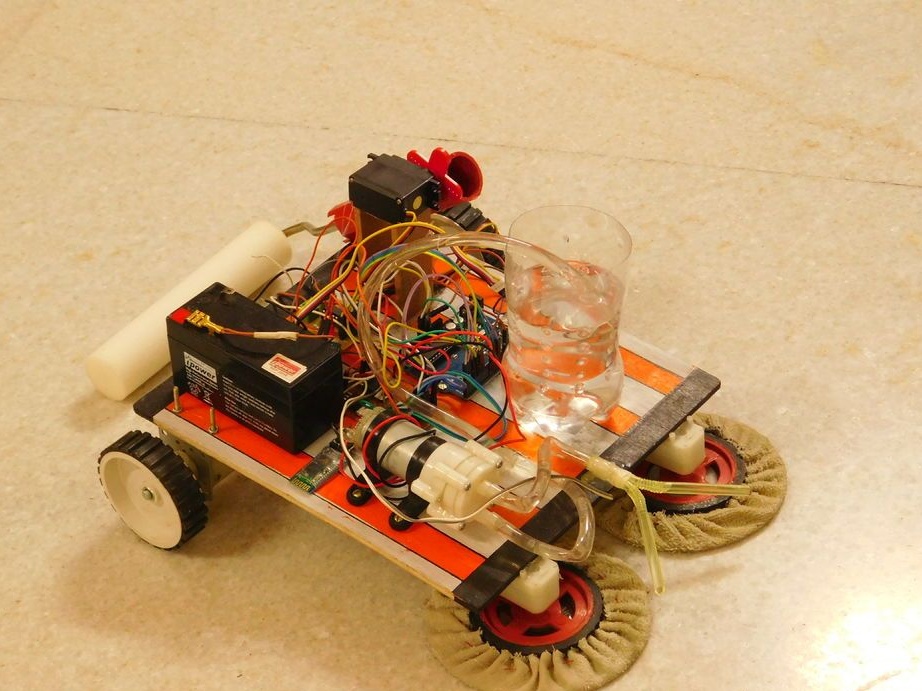
Le robotLa moissonneuse a dans son arsenal deux brosses rotatives montées à l'avant de l'arbre du motoréducteur. La boîte de vitesses tourne à une vitesse de 75 tr / min. Le robot a un réservoir d'eau à bord. Un rouleau est fixé à l'arrière du robot. Le robot est mélangé à l'aide de roues fixées sur l'axe du motoréducteur. Le nettoyeur est contrôlé par smartphone via Bluetooth. À l'avenir, le Master prévoit de rendre le robot entièrement autonome. Voyons comment fonctionne cet appareil.
Outils et matériaux:
-Motor gear 100 rpm -2 pcs;
-Jantes pour le moteur -2 pcs;
-Motor-réducteur avec une roue de 75 tr / min - 2 pièces;
-Arduino UNO;
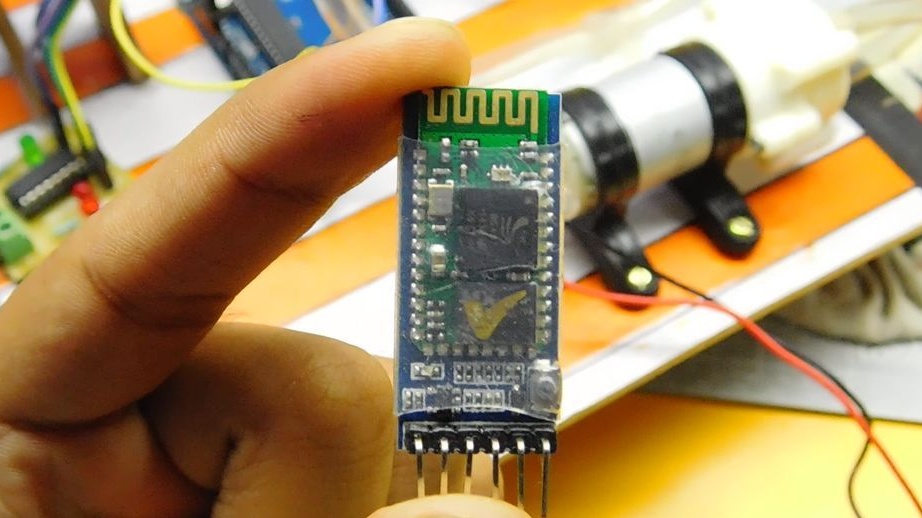
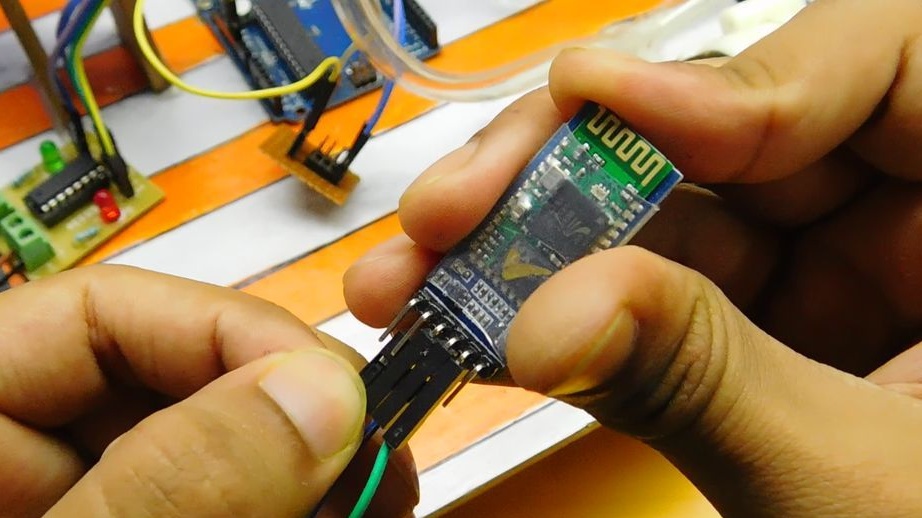
- Module Bluetooth HC-05/06;
-Driver L293D;
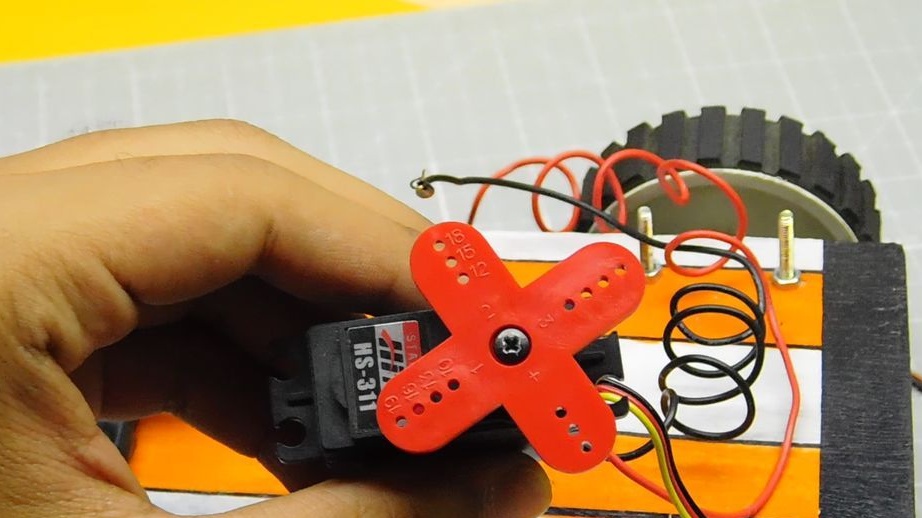
- Servomoteur (rotation à 180 degrés);
-12V batterie;
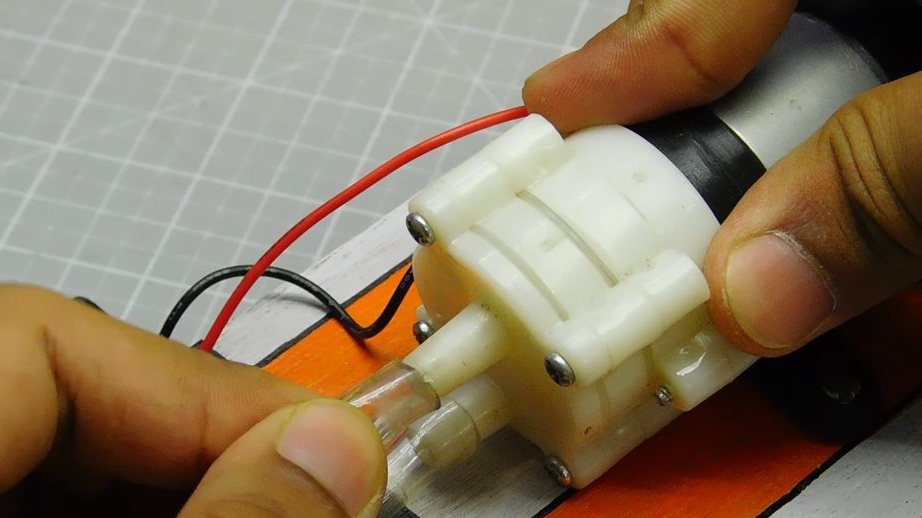
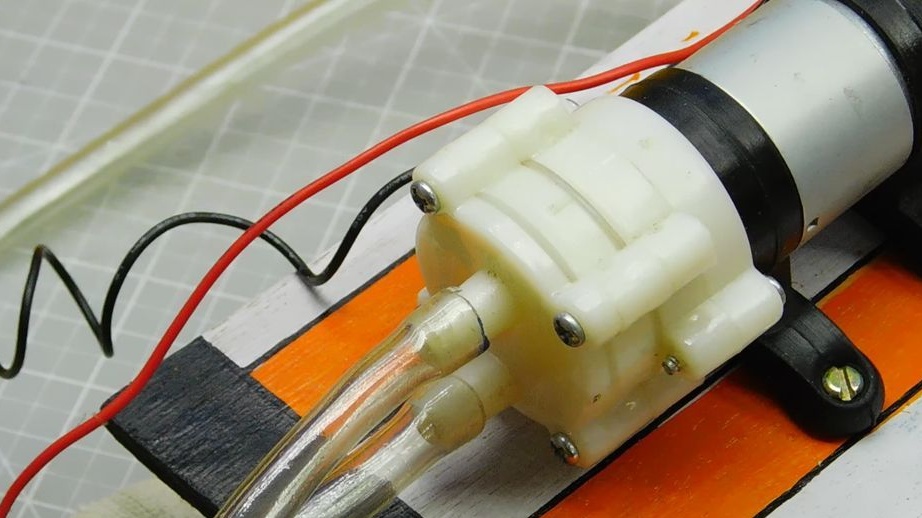
- Pompe 12 V;
Transistor TIP31C;
Transistor TIP122;
- Lecteur de CD - 2 pièces;
- Rouleau à peinture;
- Serviettes en tissu;
- Aiguille avec fil;
-Tube;
-Fil;
- Cavaliers;
-Conseil de montage;
-Fixations;
-Contreplaqué;
-Bouteille en plastique;
-Fer à souder;
-Pistolet à colle;
-Drill;
- Pinces;
-Dremel;
- brosse;
-Peindre;
-Marqueur;
- ciseaux;











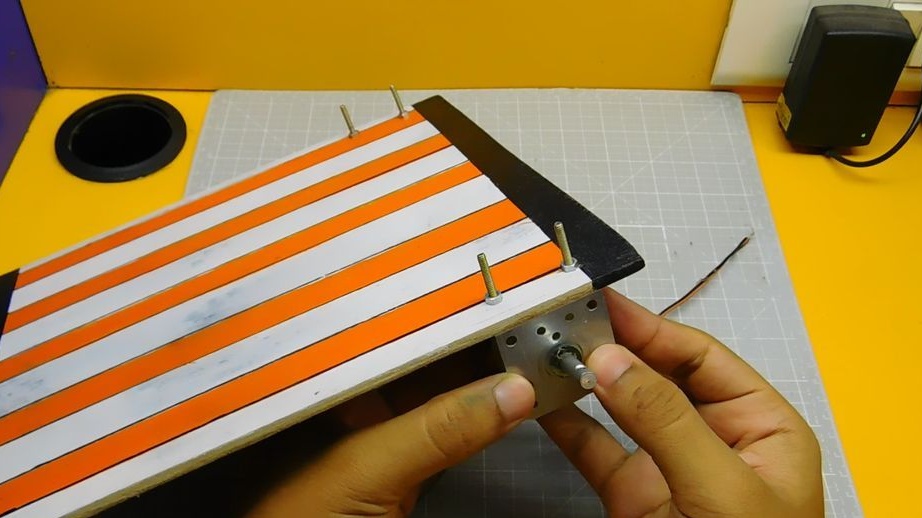
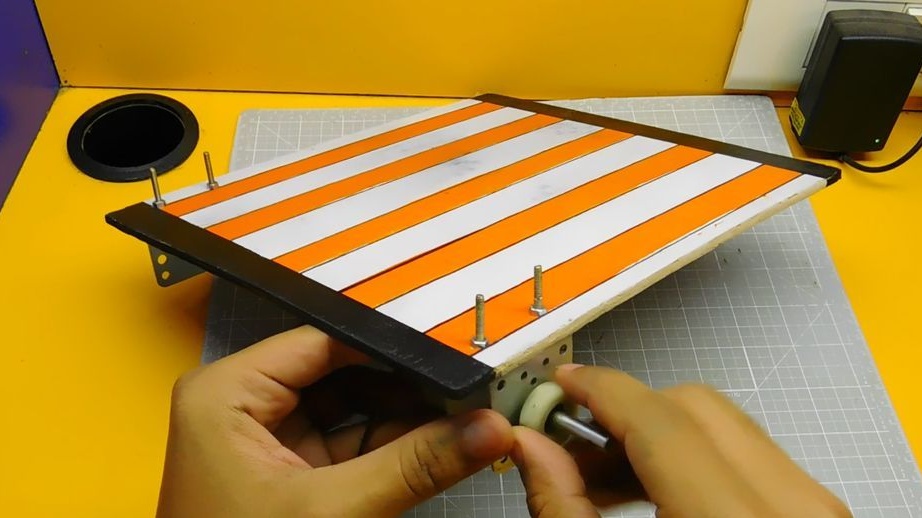
Première étape: Fondation
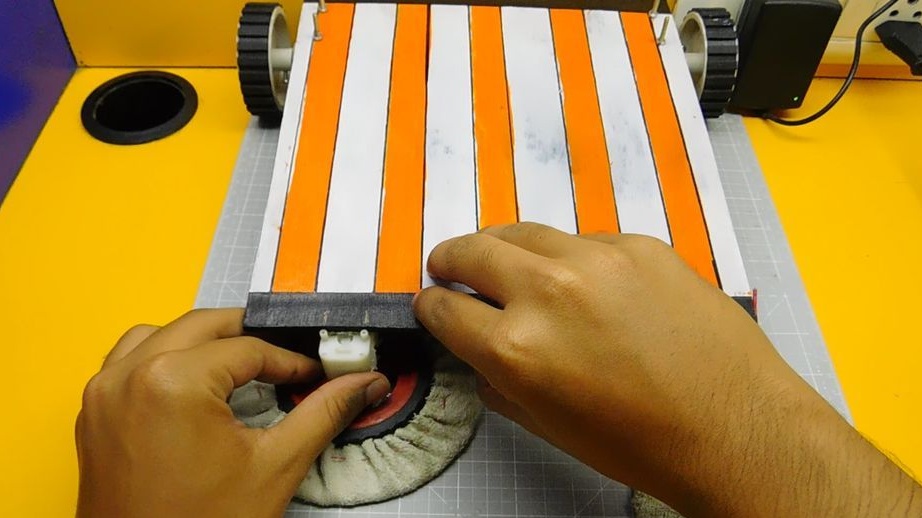
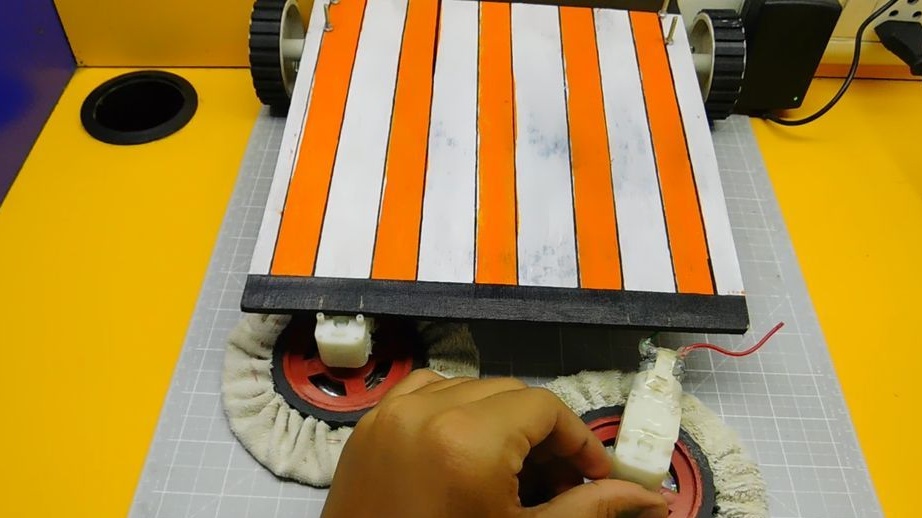
Du contreplaqué coupe la base. Les dimensions de la base sont de 30 * 22 cm. D'une part, il fixe le motoréducteur. Fixe coaxialement le motoréducteur de l'autre côté de la base.



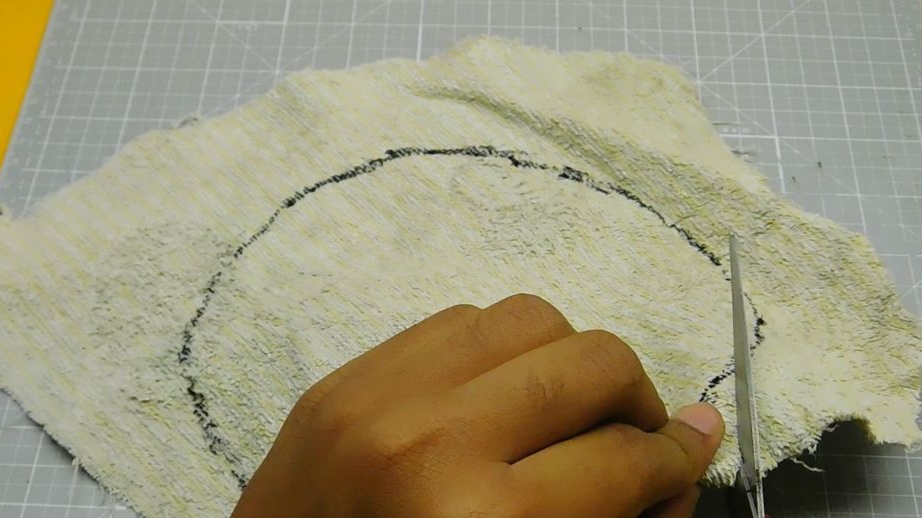
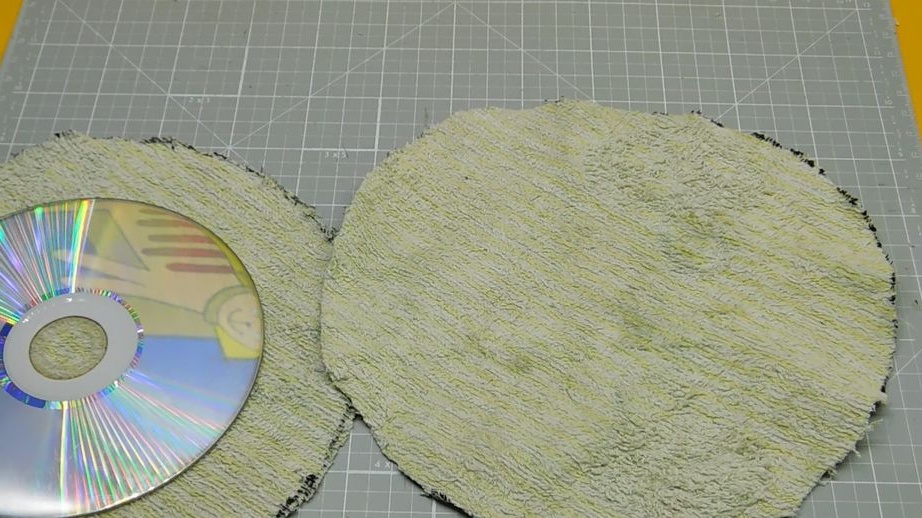
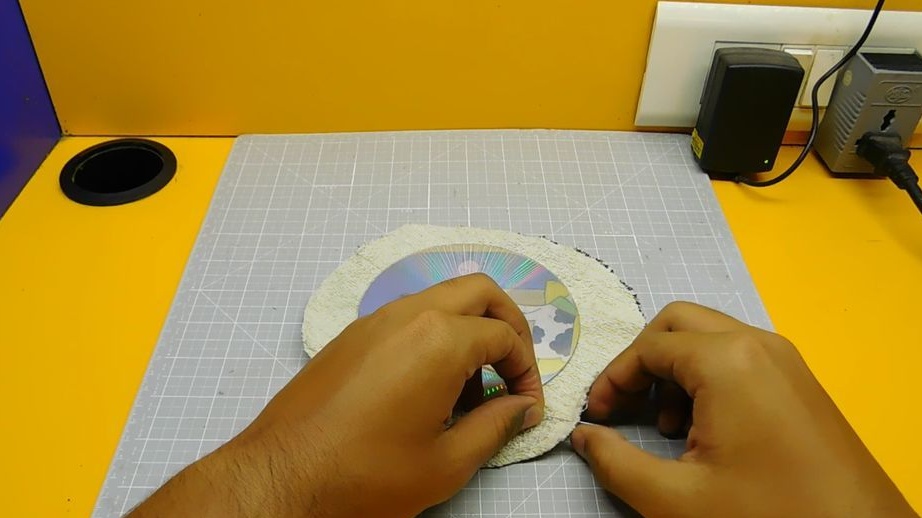
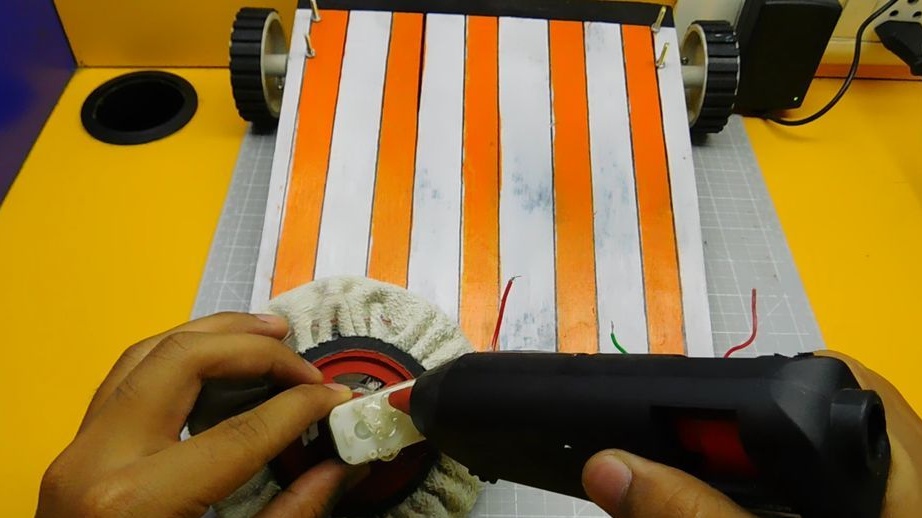
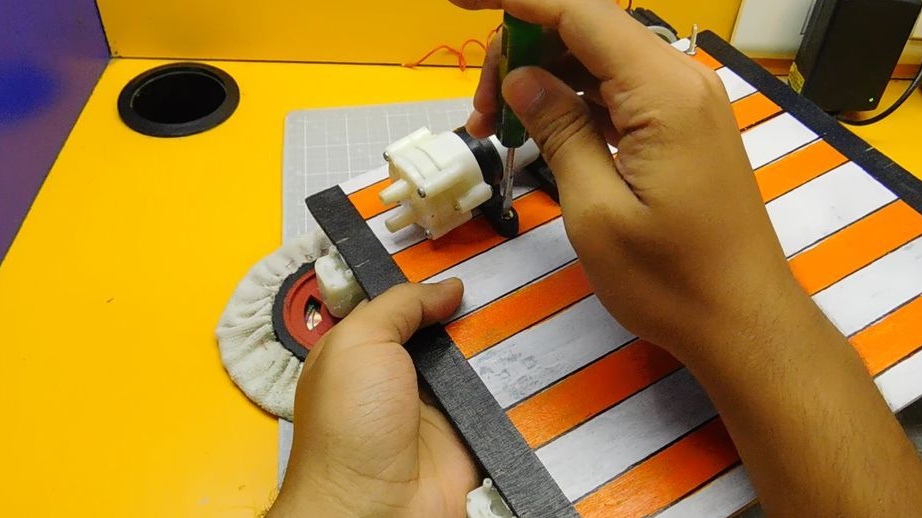
Deuxième étape: brosses
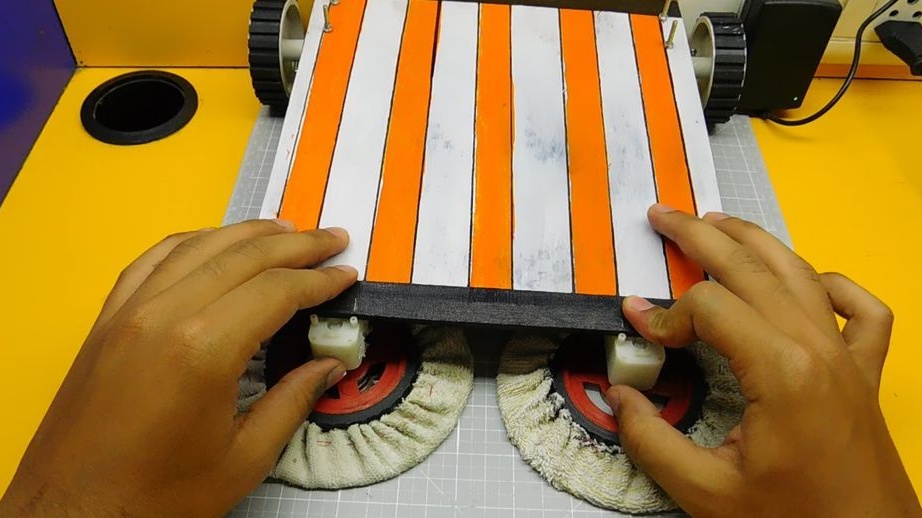
Le maître a fait des pinceaux à partir de vieux CD. Coupez un chiffon. Gaina son lecteur. Opération répétée avec un autre disque. Fixez les disques avec de l'adhésif thermofusible sur la roue du motoréducteur. Fixation des deux motoréducteurs devant la plate-forme.








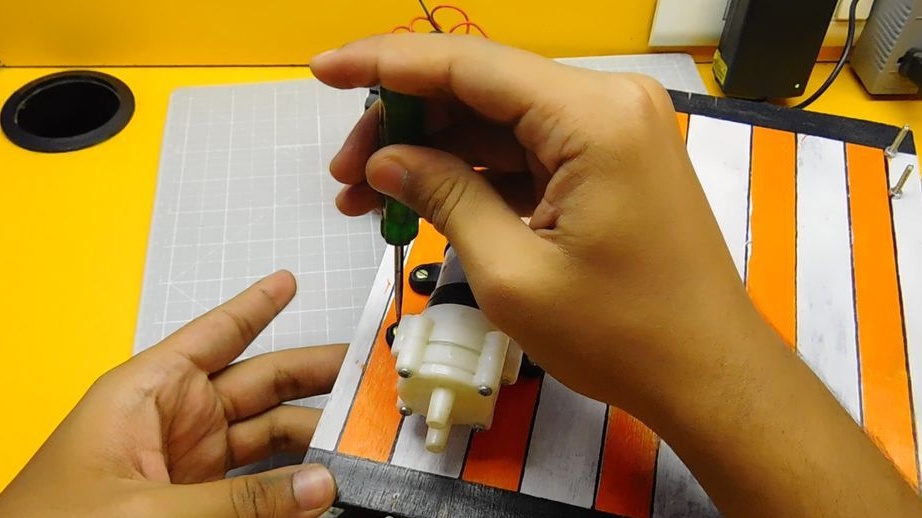
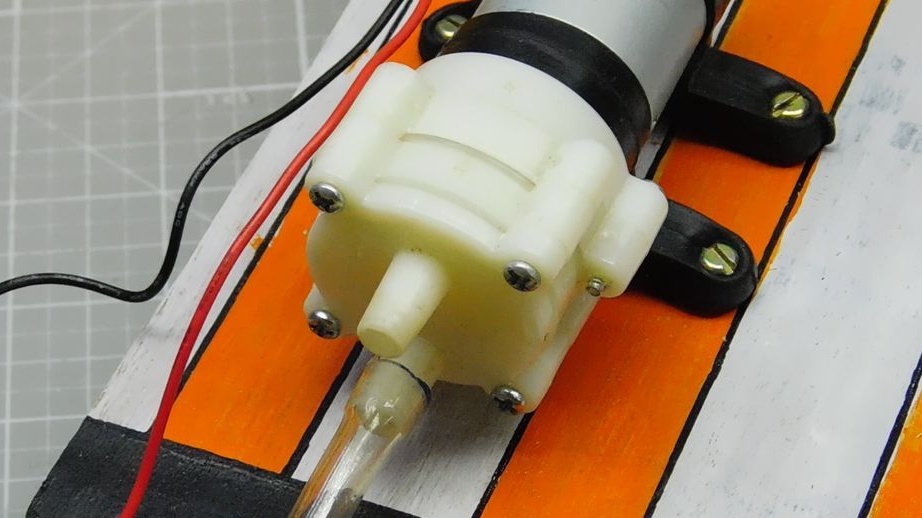
Deuxième étape: l'approvisionnement en eau
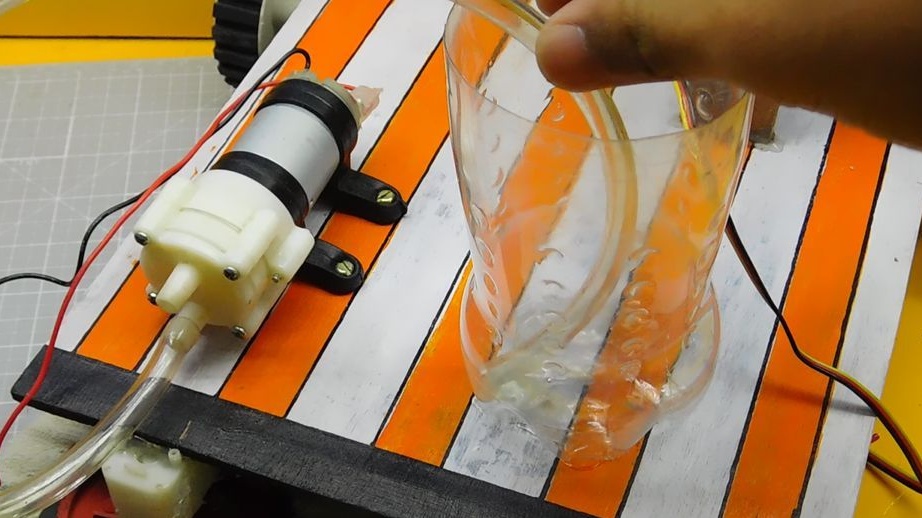
Fixe la pompe à la plate-forme. Coupe le haut d'une bouteille en plastique. Fixe la bouteille à la plate-forme. Installe un tuyau d'admission d'eau. Plus tard, le tuyau d'alimentation en eau des brosses sera réparé.




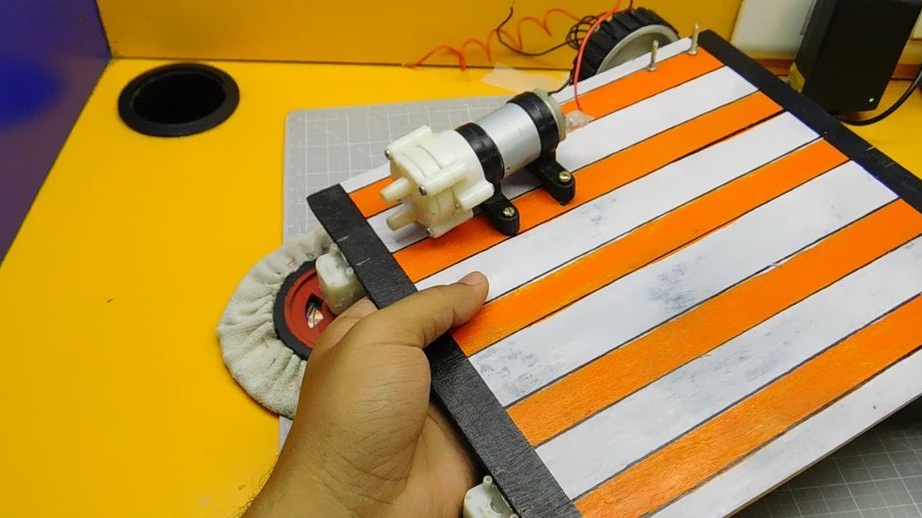




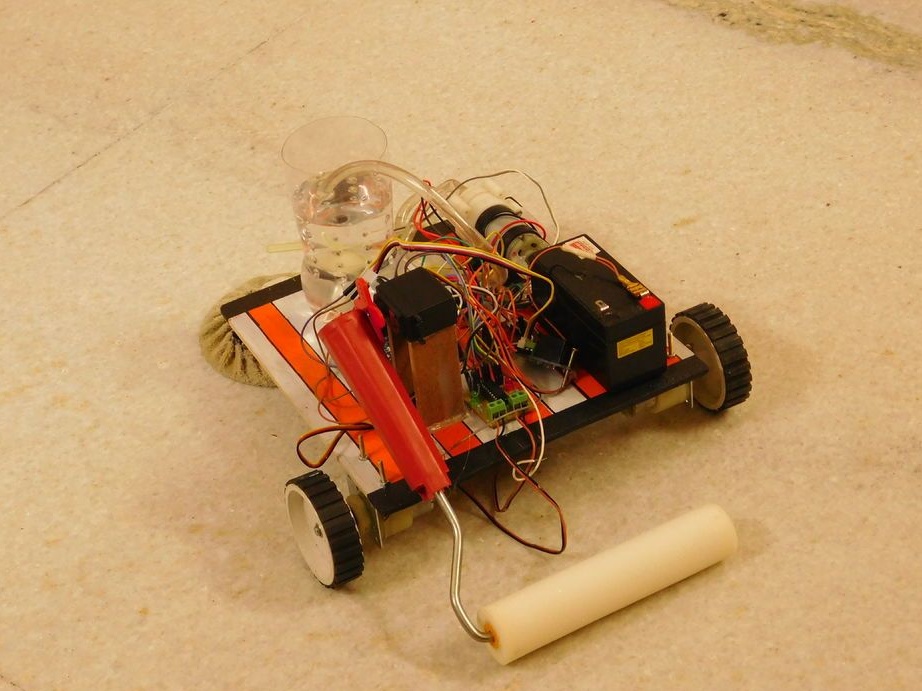
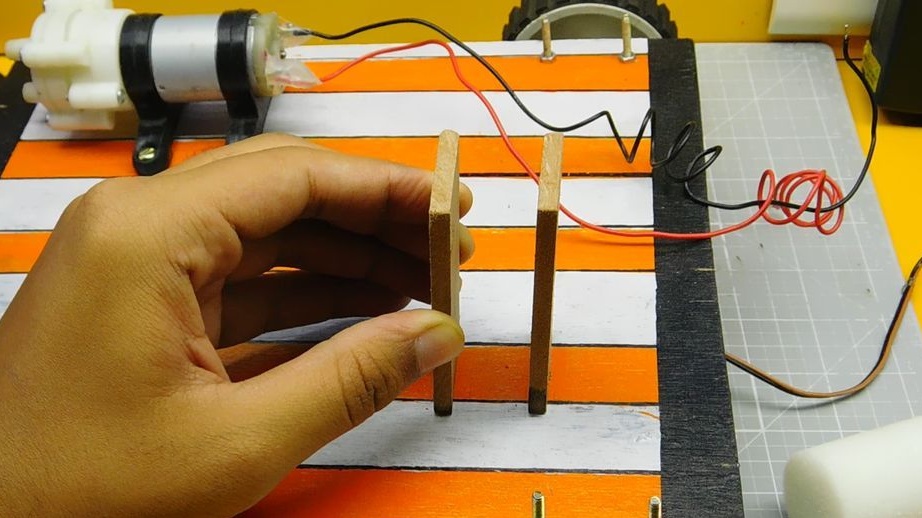
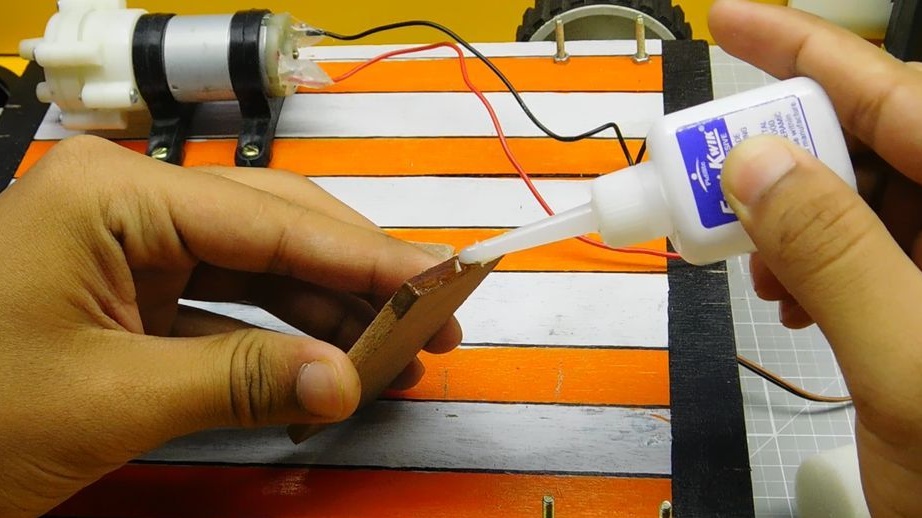
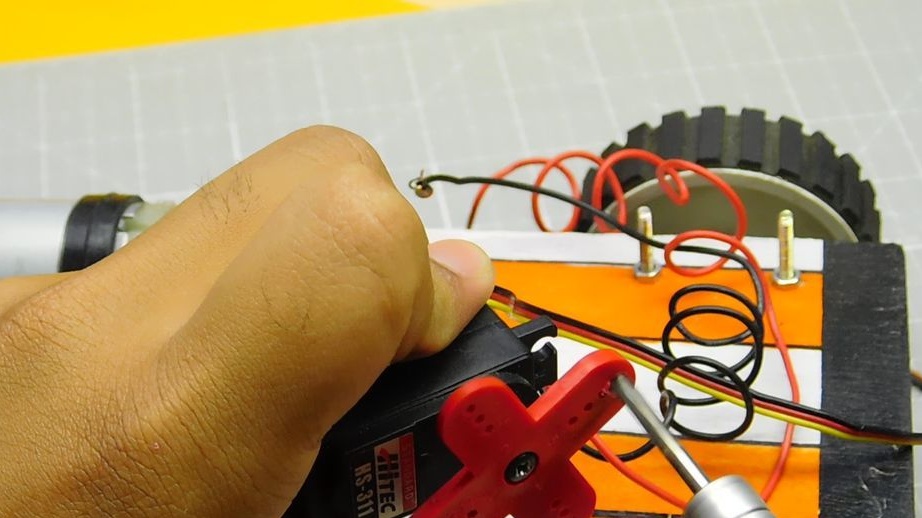
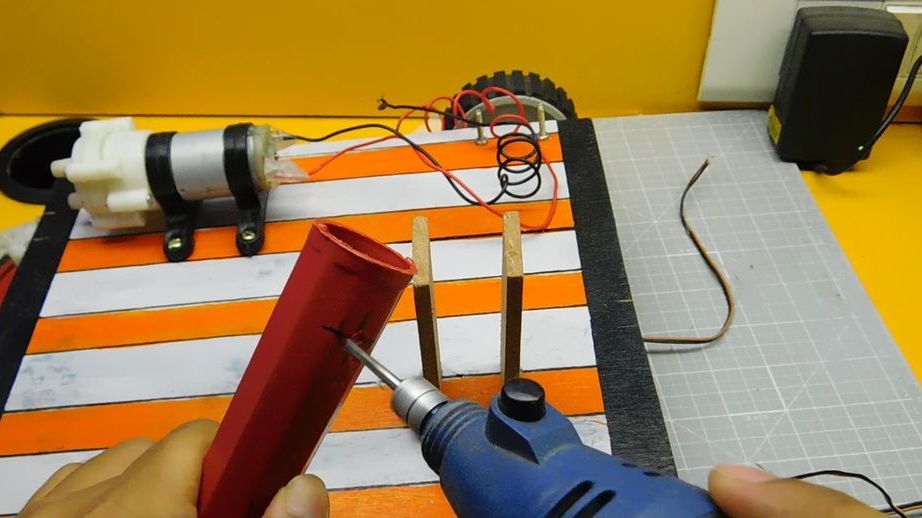
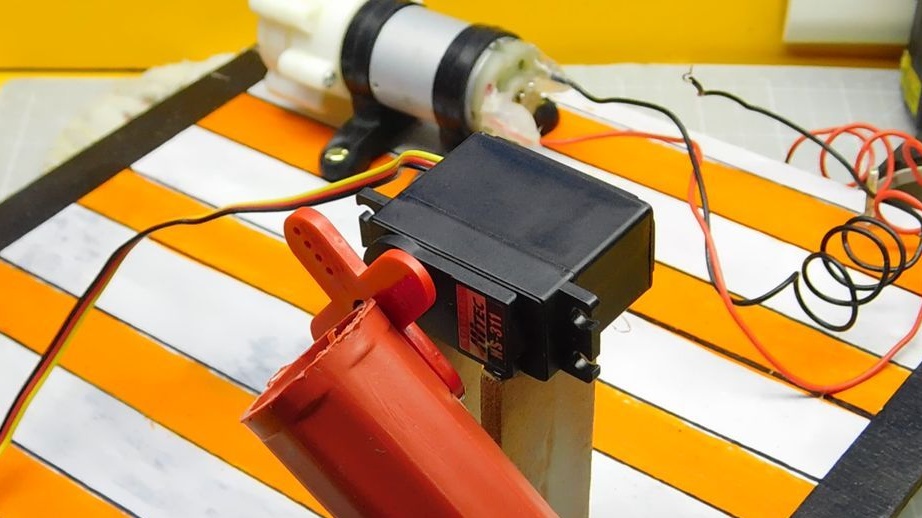
Troisième étape: mécanisme de levage à rouleaux
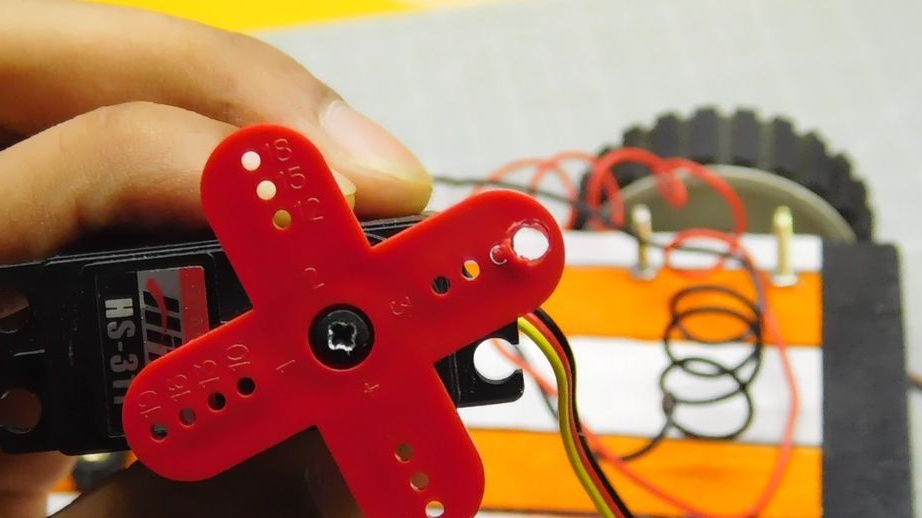
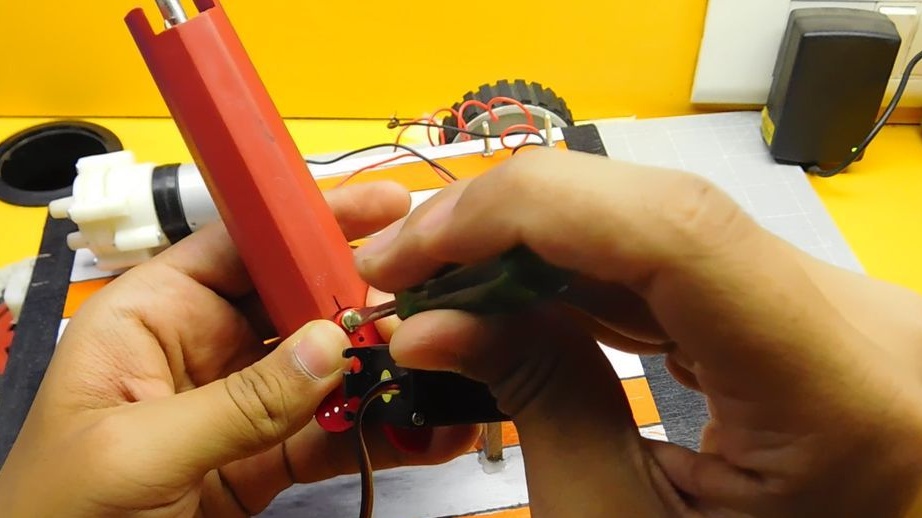
La tâche du rouleau est de recueillir les poussières fines. Comme le rouleau est parfois nécessaire, le capitaine a décidé de créer un mécanisme pour soulever et abaisser le rouleau. Fixe deux lattes sur la plateforme parallèlement l'une à l'autre. Fait deux trous, un dans le levier du servo, le second dans la poignée du rouleau. Vis la poignée du rouleau au levier. Fixe le servo aux lattes.


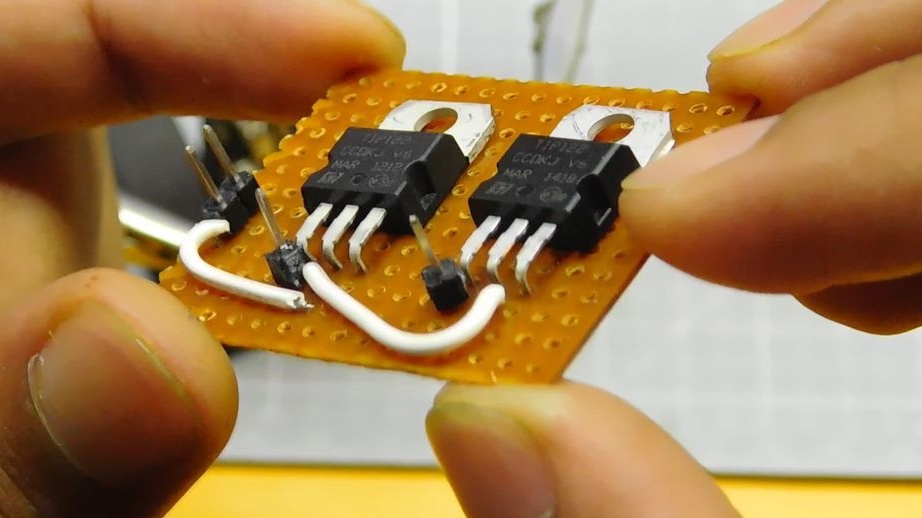
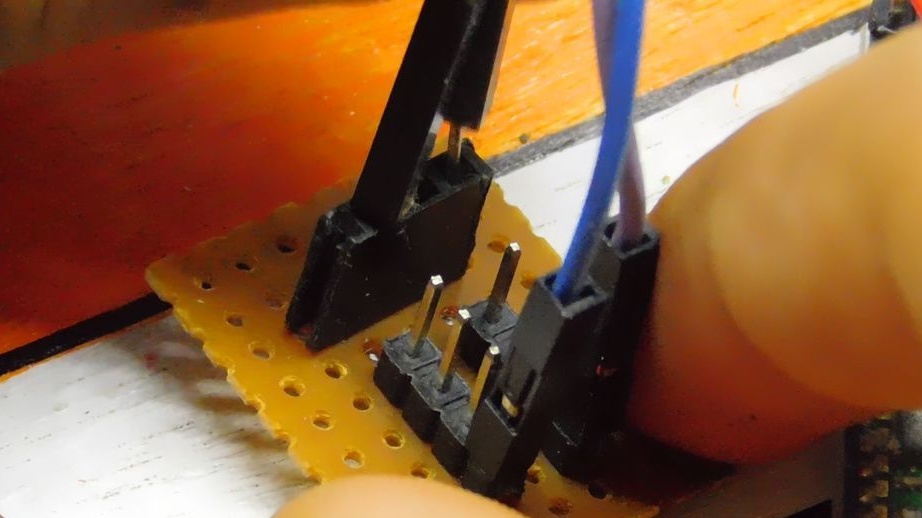
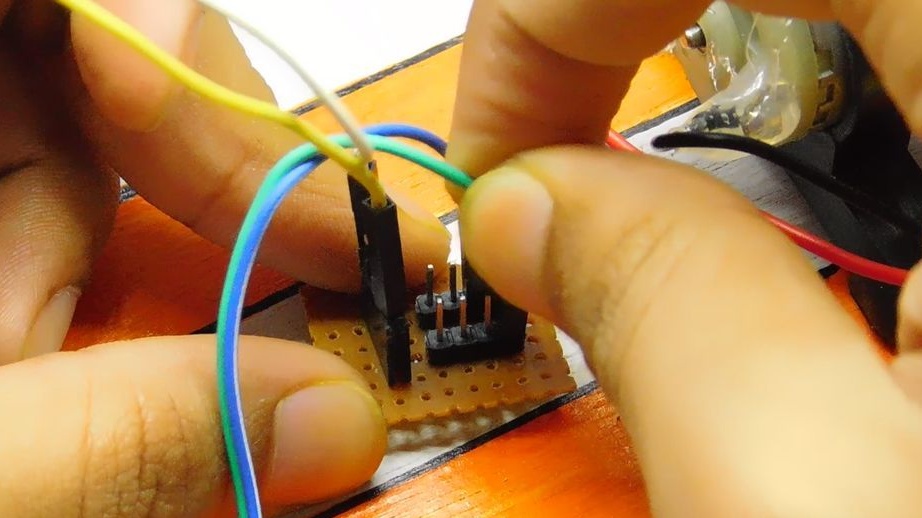
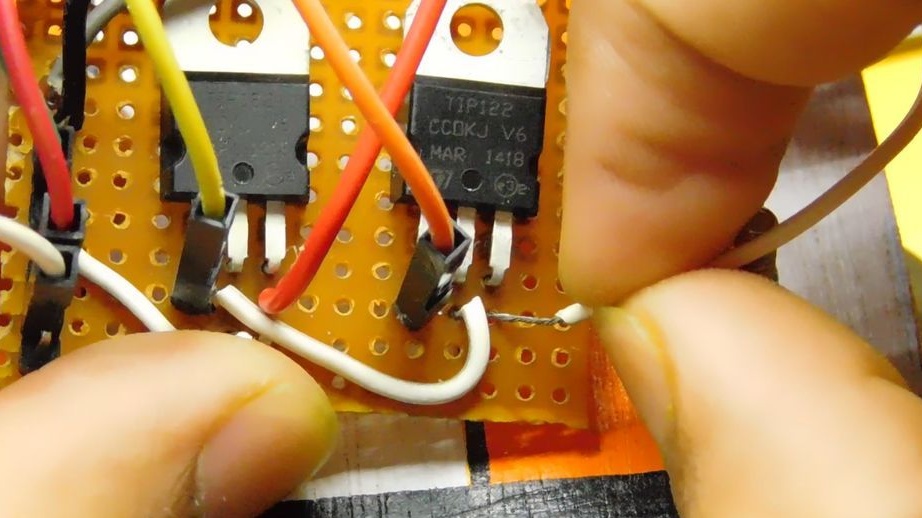
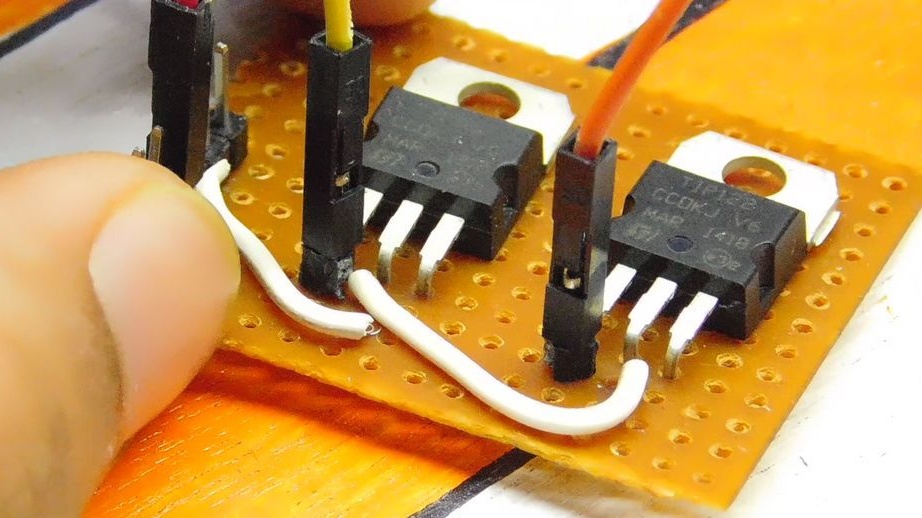
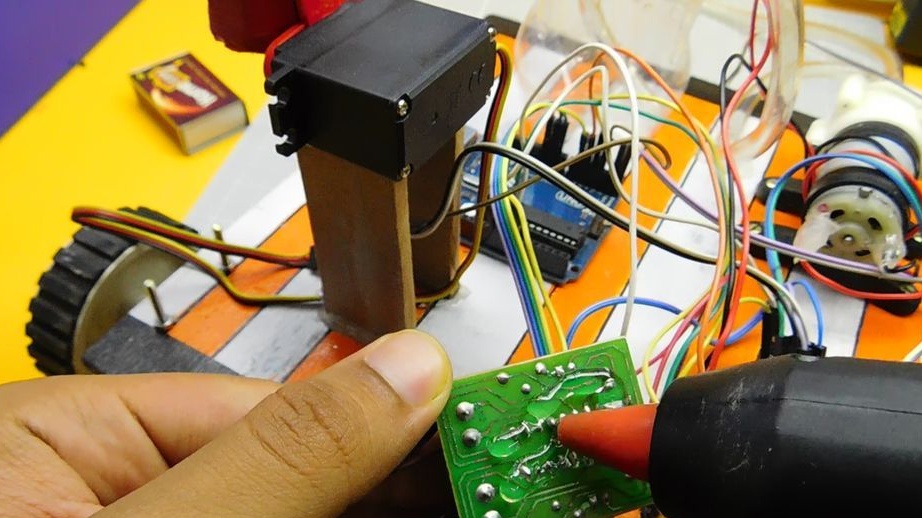
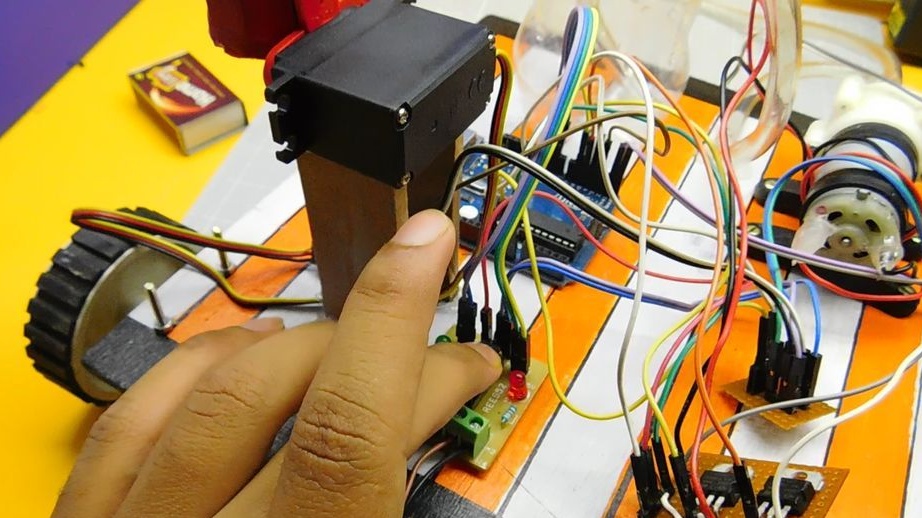
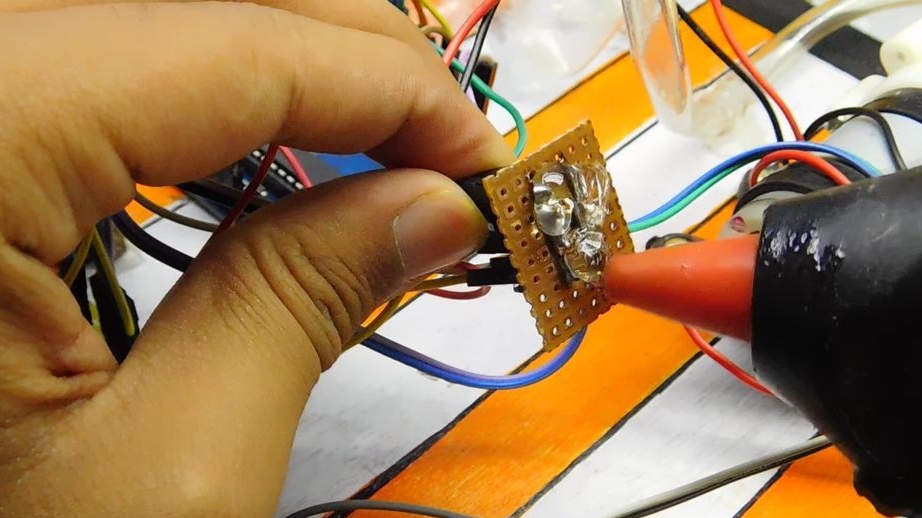
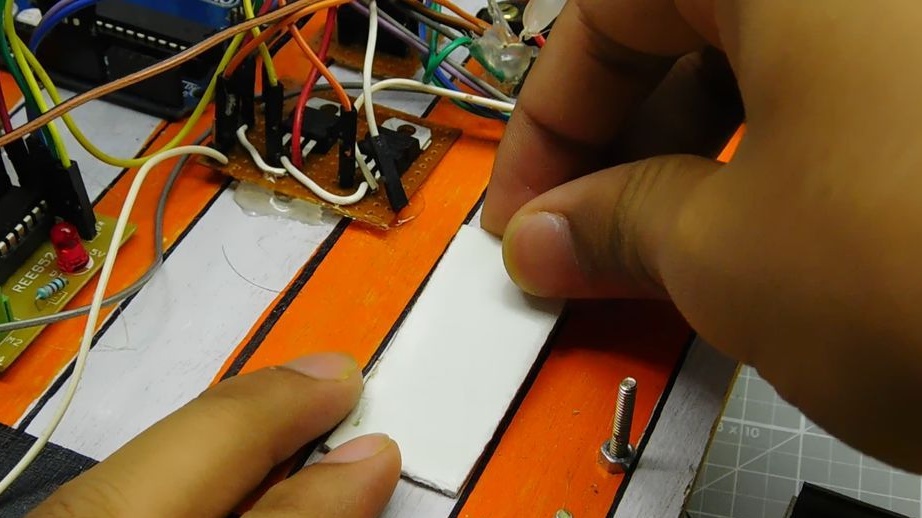
Quatrième étape: transistor
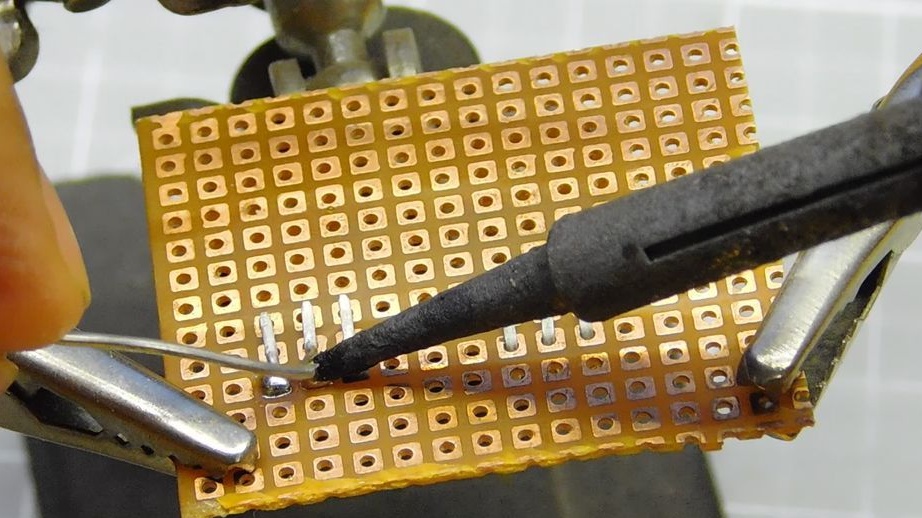
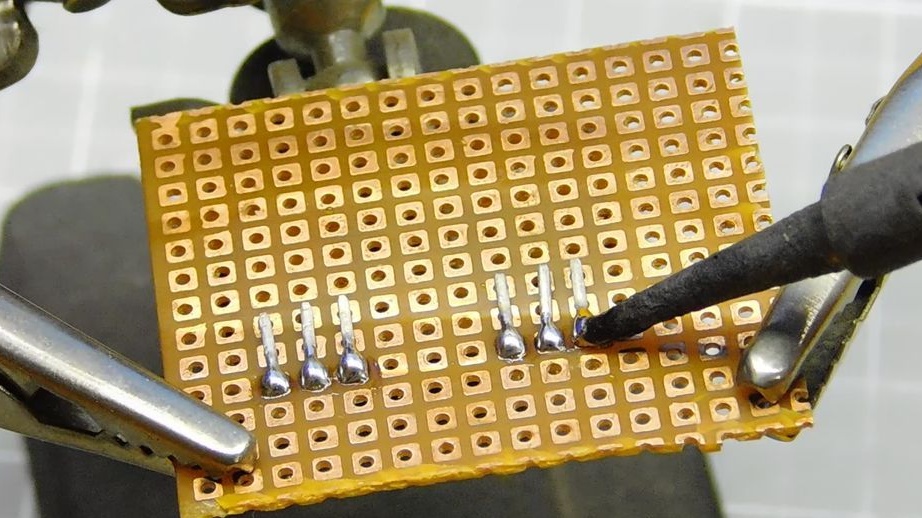
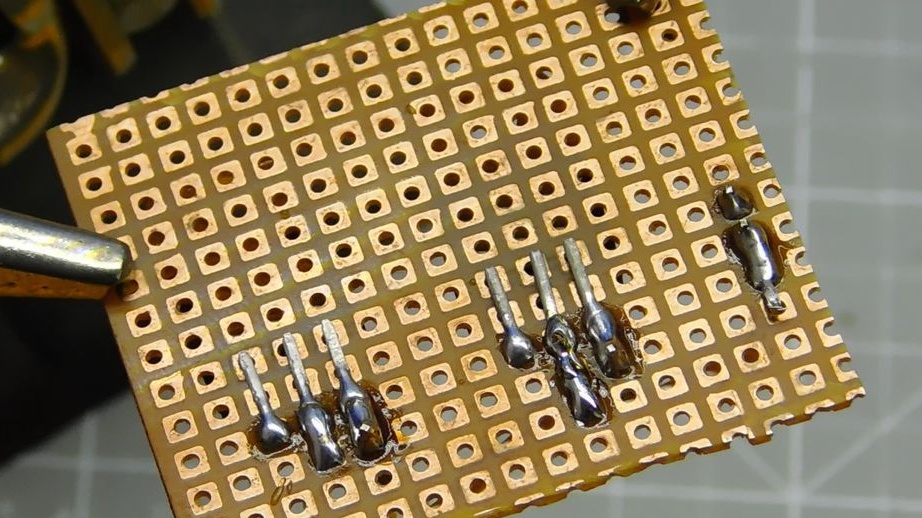
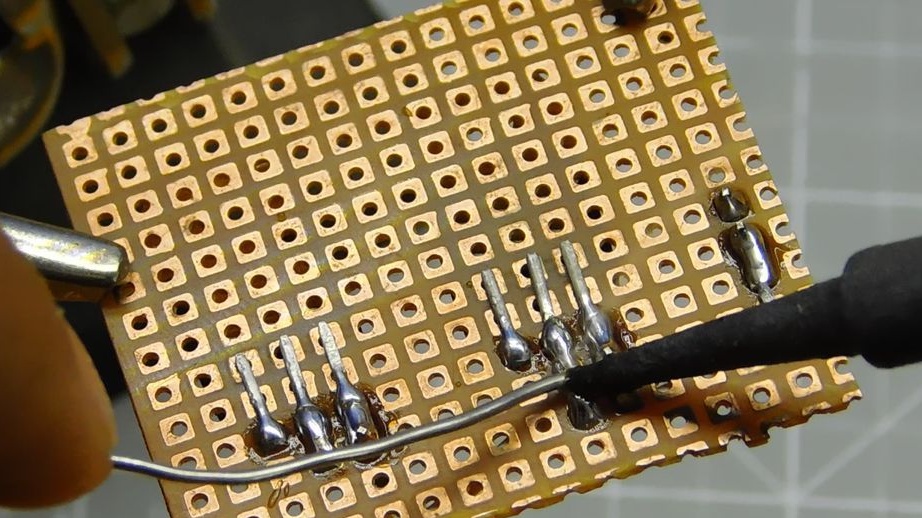
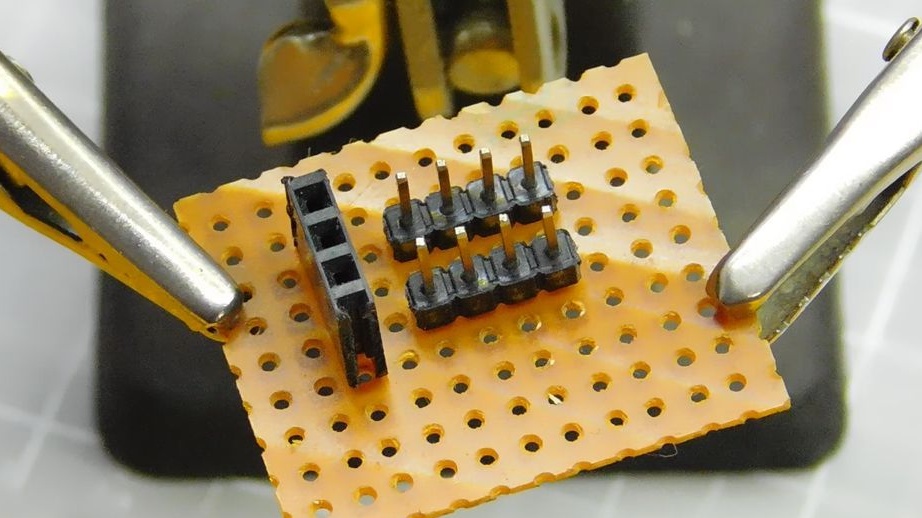
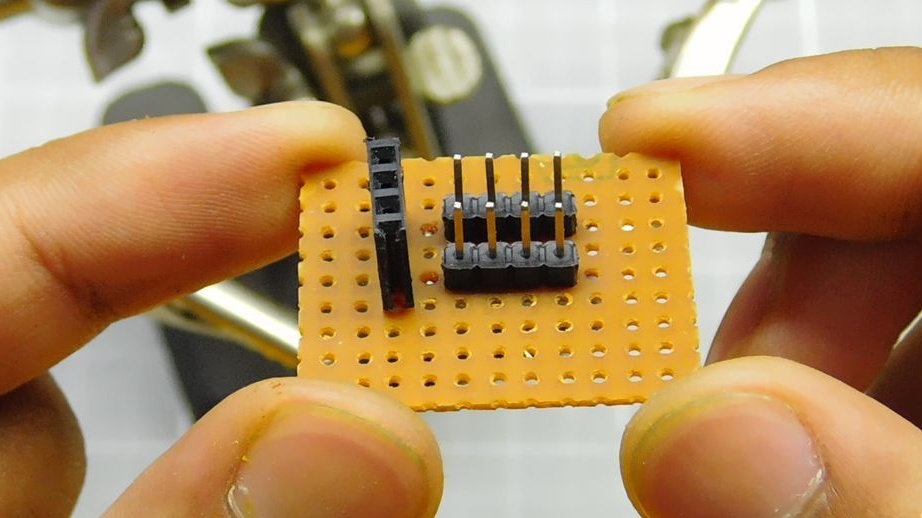
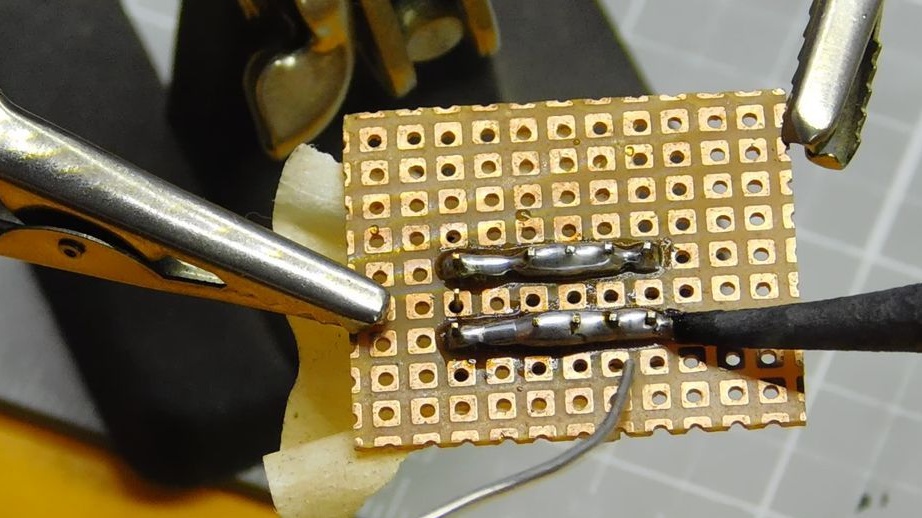
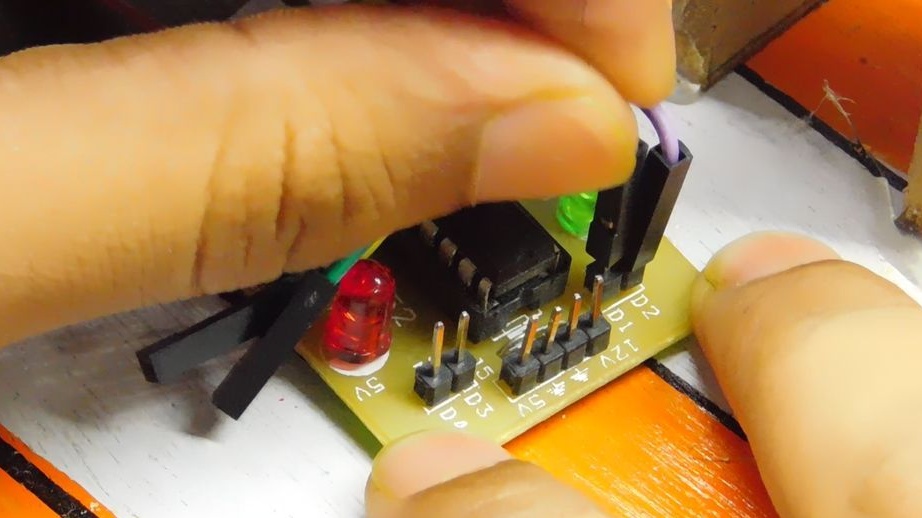
Pour une pompe à eau et des moteurs, une alimentation de 12 V est nécessaire, mais comme Arduino ne fournit que 5 V, le maître récupère le circuit sur le transistor TIP122.De plus, l'assistant ajoute plusieurs broches + 5V et Gnd à la carte de circuit imprimé.
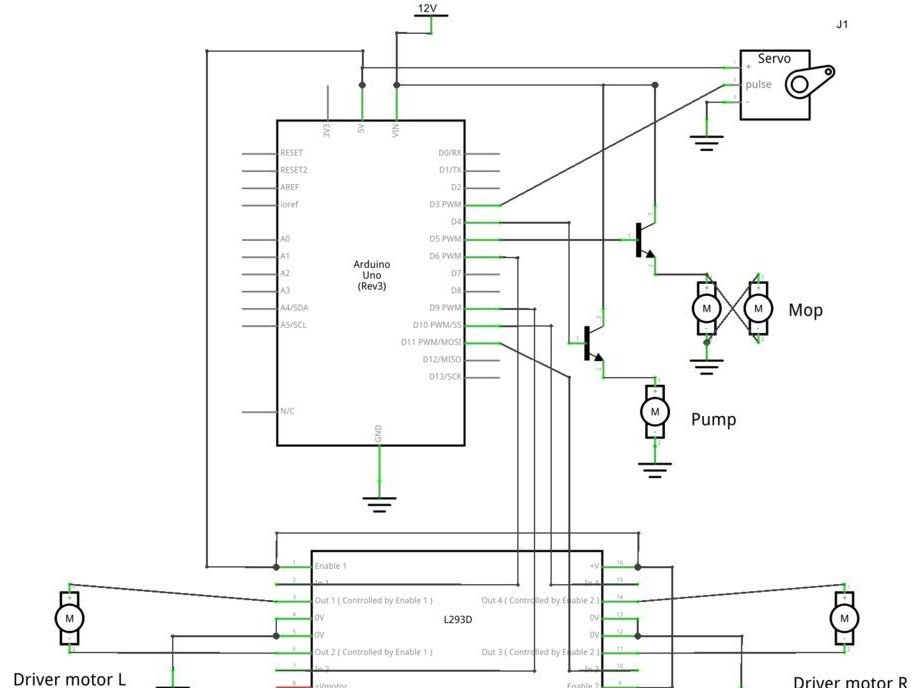
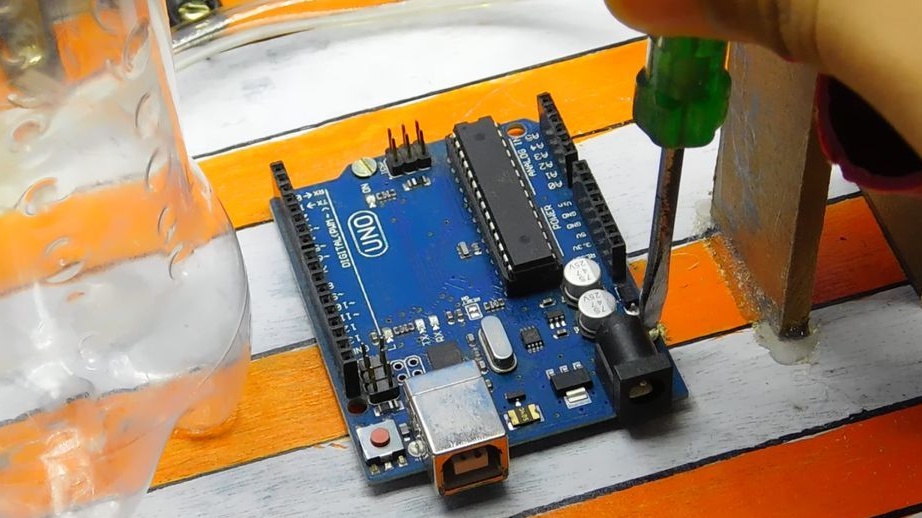
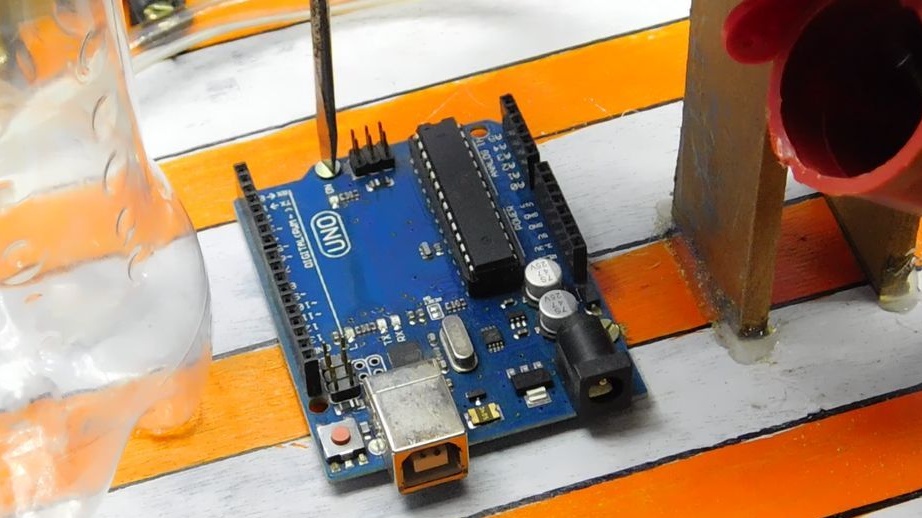
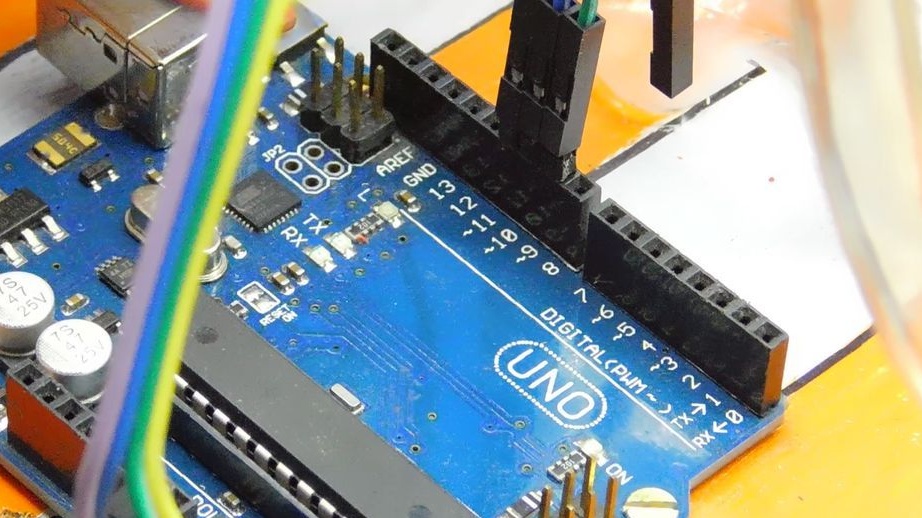
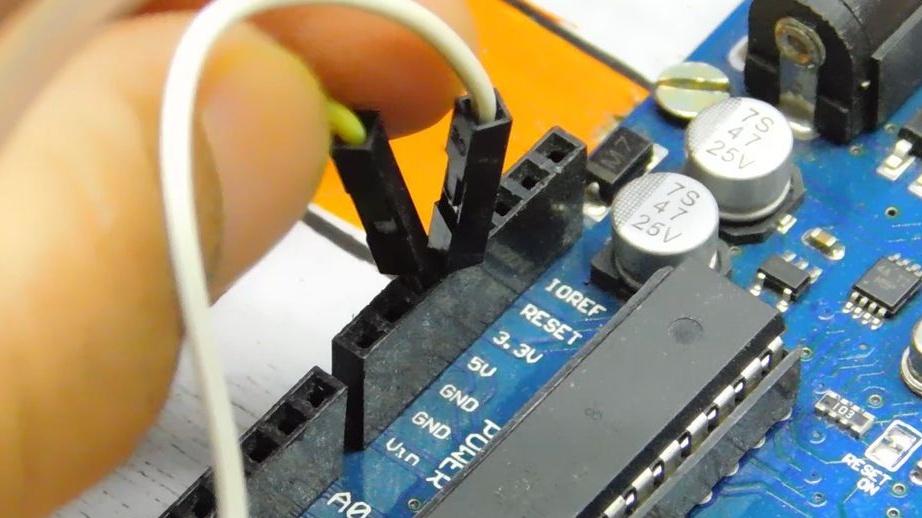
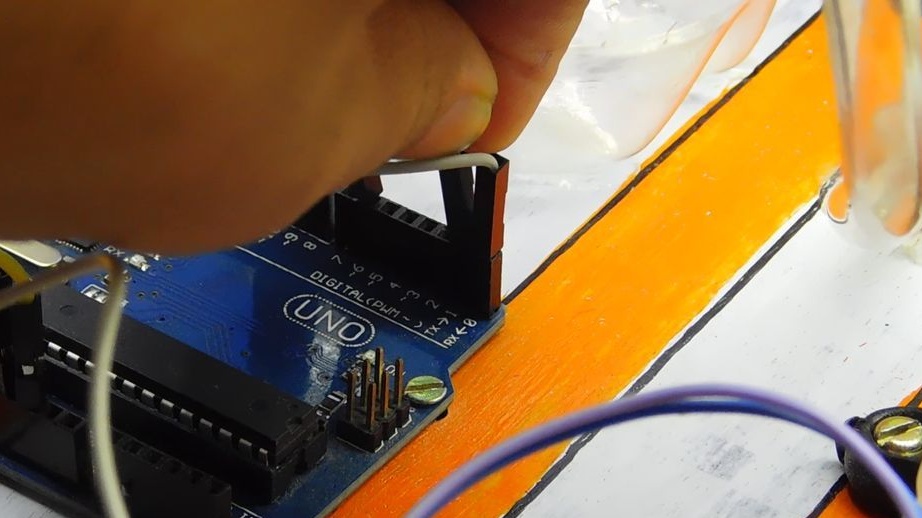
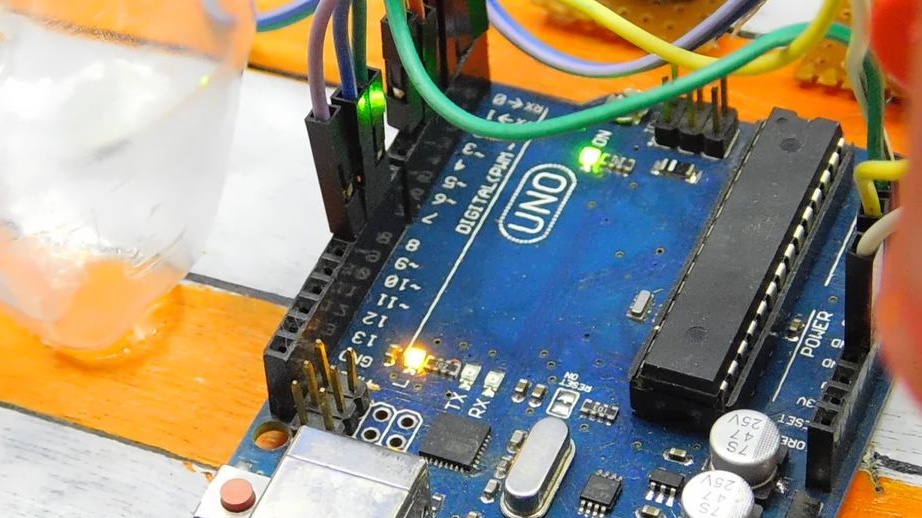
Étape cinq: Installation du circuit Arduino
Fixe Arduino à la plate-forme et connecte les appareils électriques à la carte.
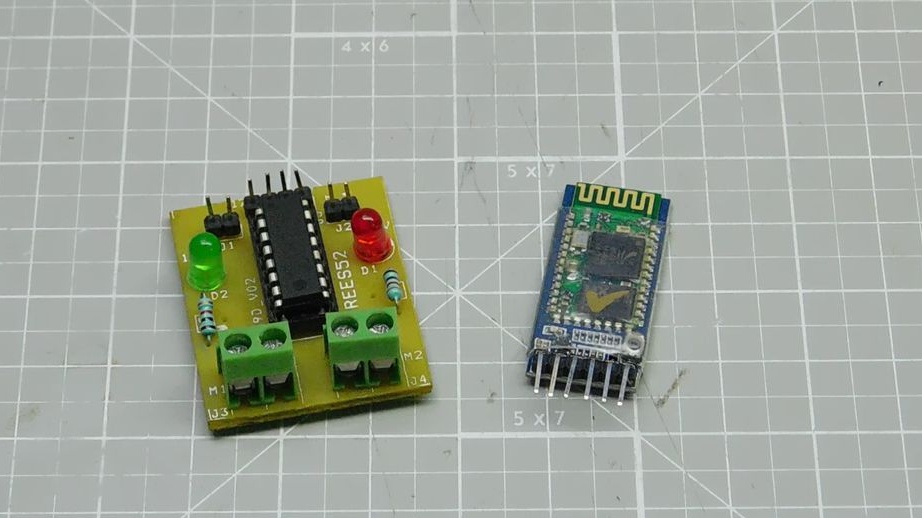
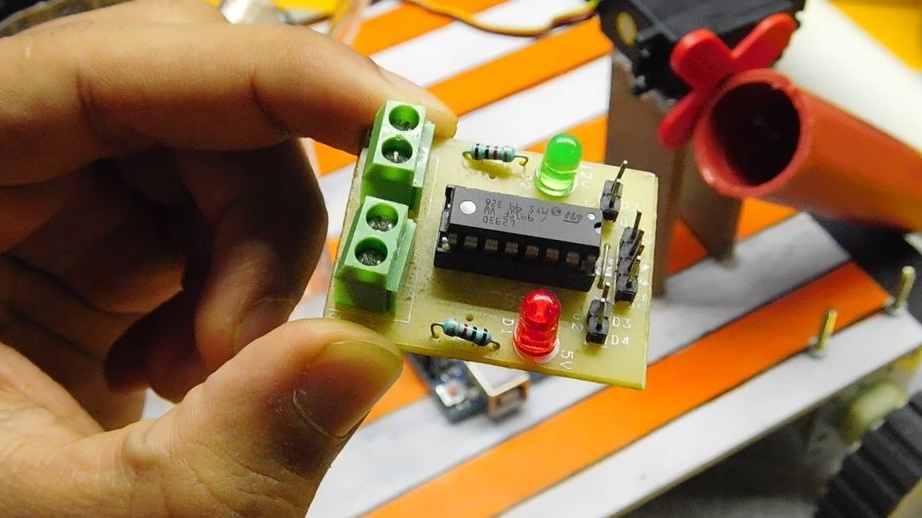
Module de contrôle moteur.
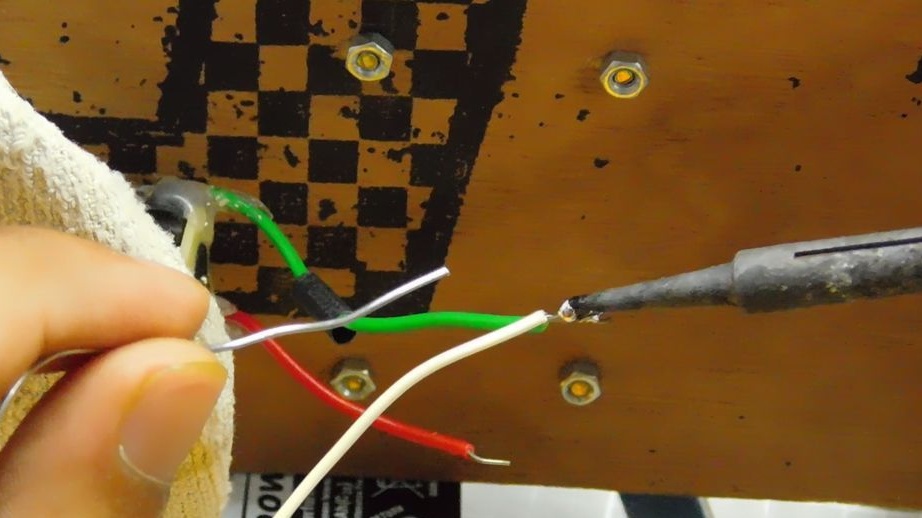
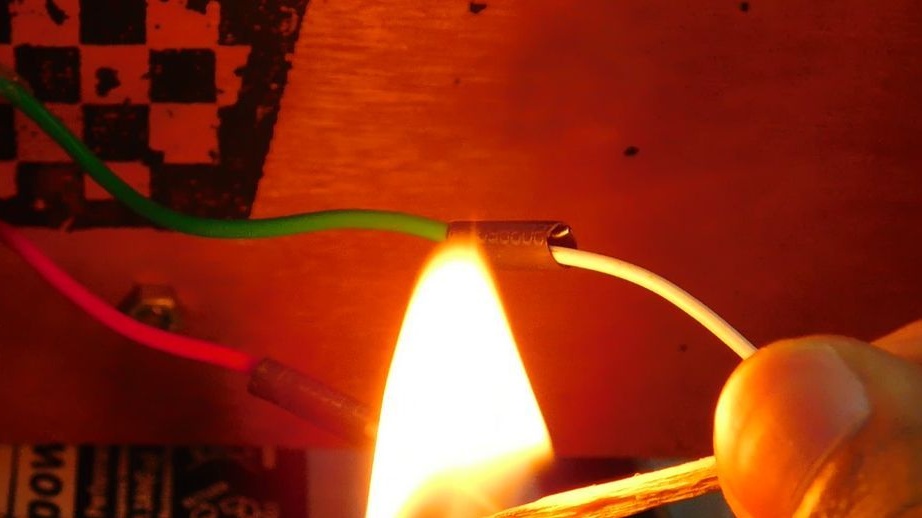
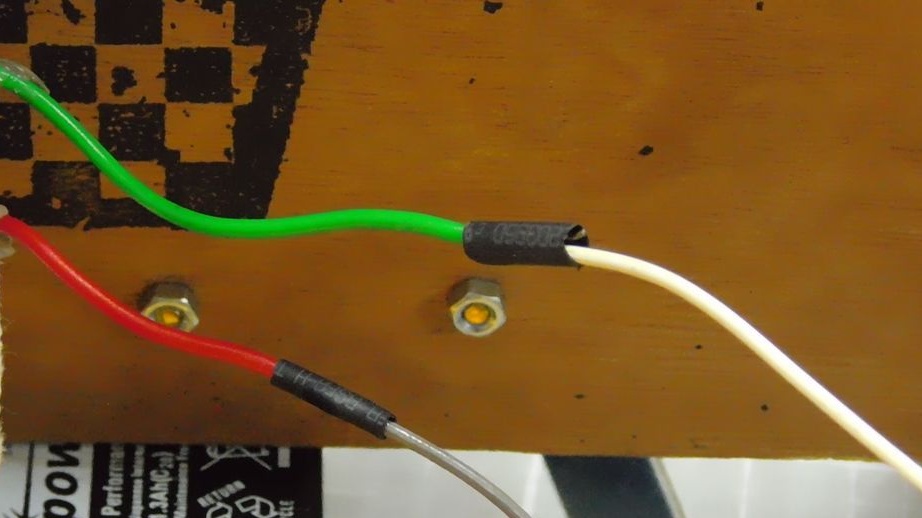
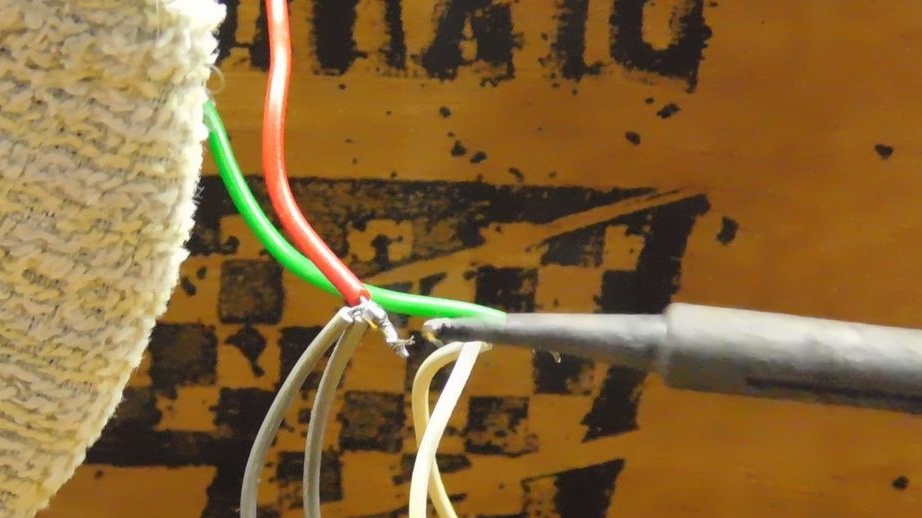
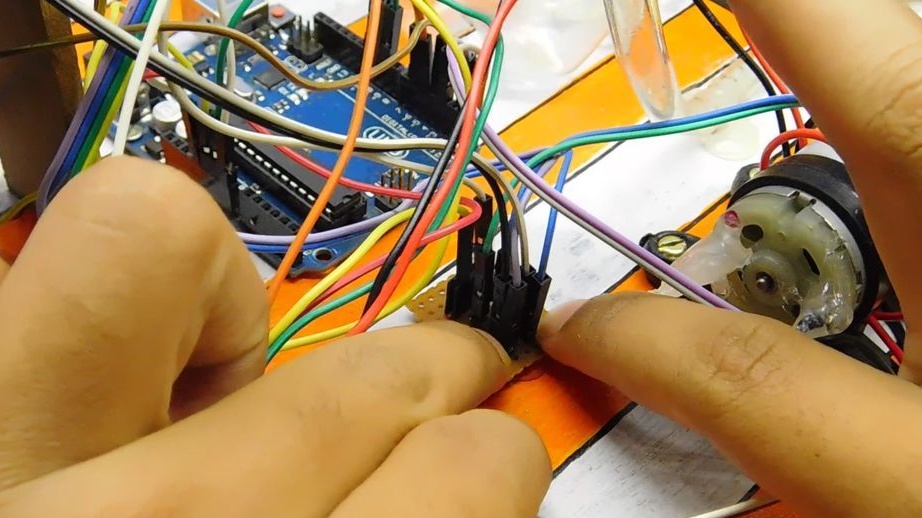
Il soude aux moteurs (sur lesquels les roues sont fixées pour le mouvement, pas les brosses) les fils. Fixe les fils dans les prises de montage du module. Ensuite, connectez le module à Arduino comme suit.
Module ::: Arduino
1 - D6
2 - D9
3 - D10
4 - D11
+ 5V - + 5V
Gnd-gnd
Le module + 12V sera connecté à la batterie.
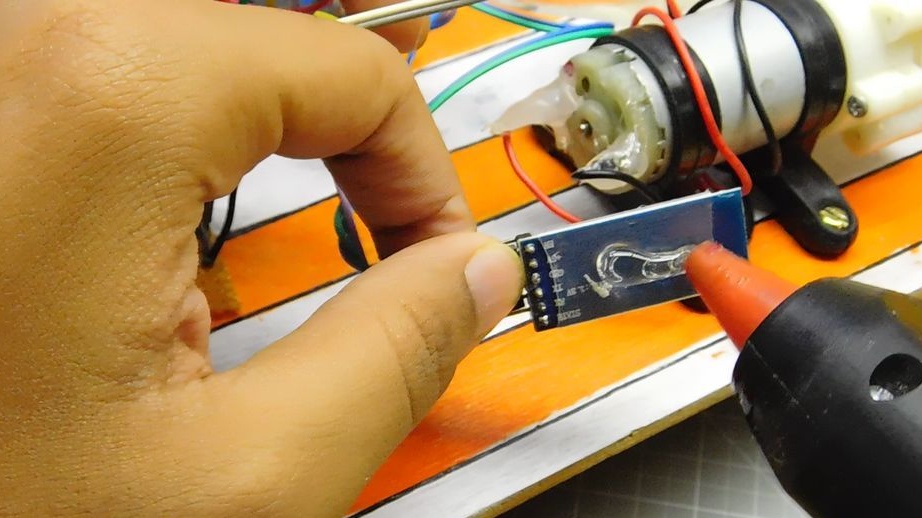
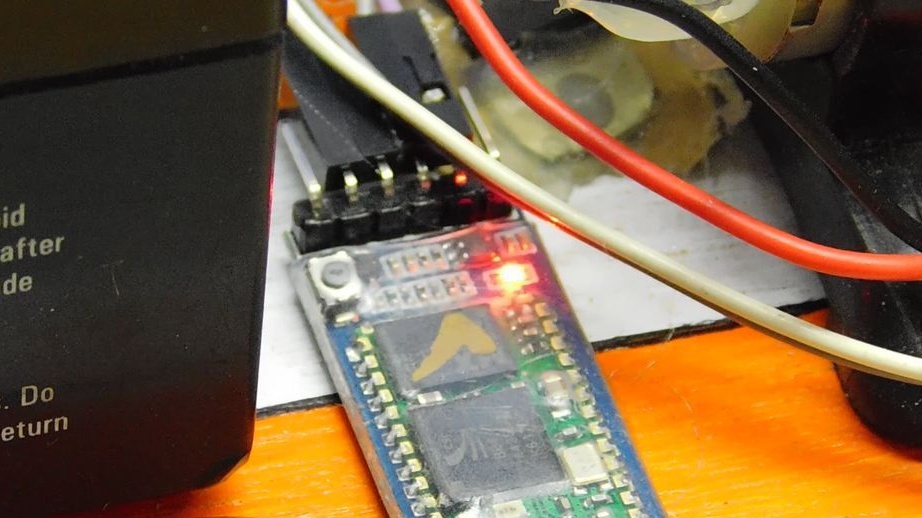
Connexion Bluetooth.
Bluetooth ::: Arduino
Vcc - + 5V
Gnd - gnd
Rx - Tx
Tx - Rx
Servomoteur ::: Arduino
Vcc - + 5V
Gnd - gnd
Signal - D3
Ensuite, il relie les moteurs de pompe et de brosse selon le schéma. Les moteurs à balais sont connectés en parallèle et tournent dans des directions différentes, à droite dans le sens horaire et à gauche dans le sens antihoraire.

Étape six: Fixations de pièces de robot
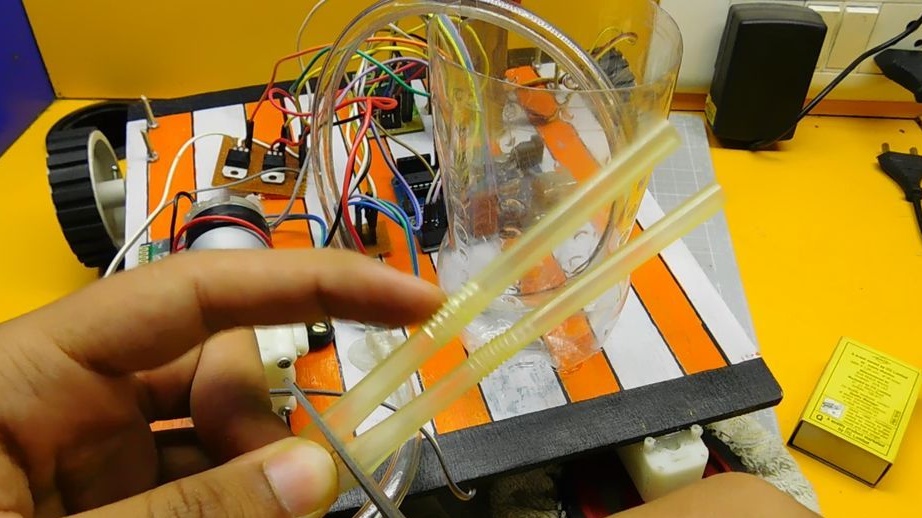
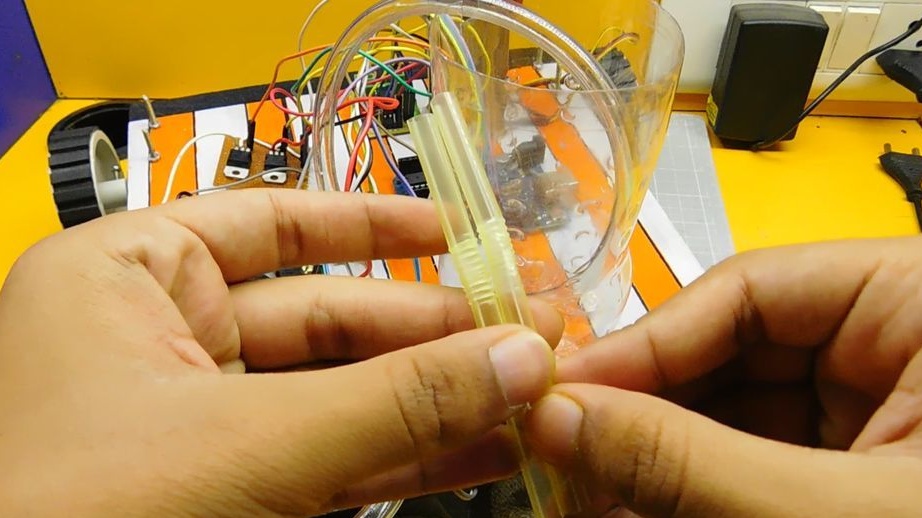
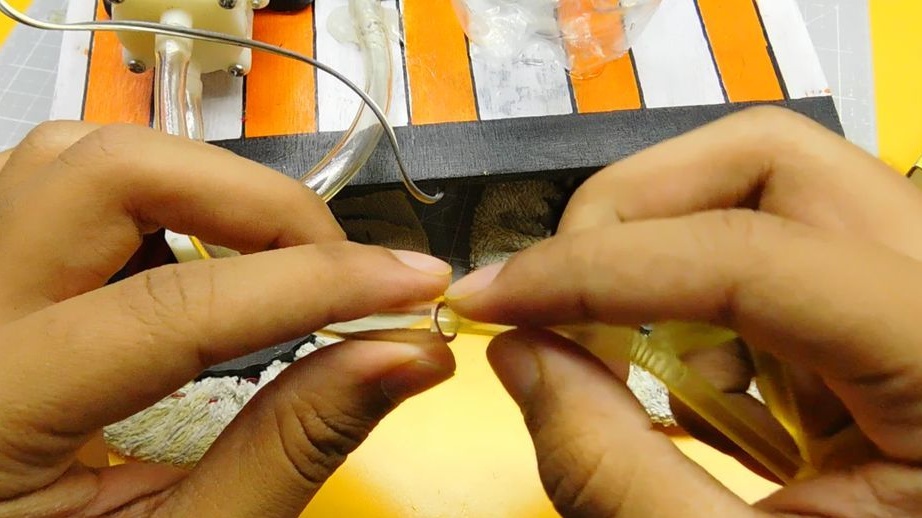
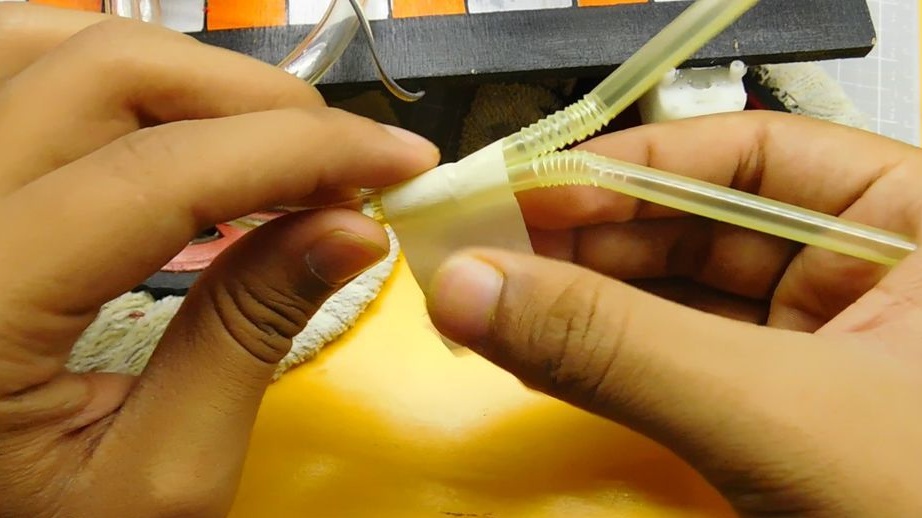
Trancher deux pailles à cocktail d'environ 7 cm chacune et insérer les pailles dans le tuyau d'arrivée d'eau. Fixe les pailles devant les brosses.




Serrures sur la plateforme électronique composants.

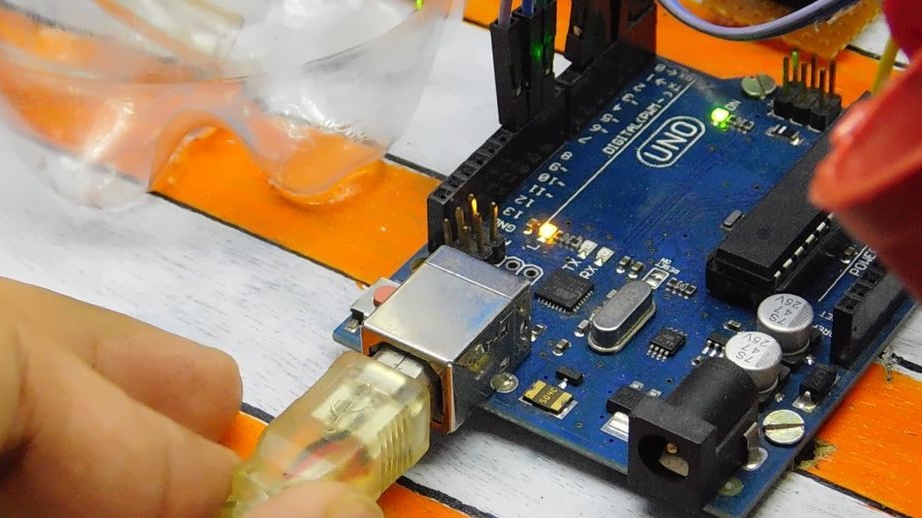
Étape 7: téléchargez le code
Supprime les cavaliers Rx et Tx de la carte Arduino. Connecte la carte à un ordinateur. Charge le code. Met les cavaliers en place. .
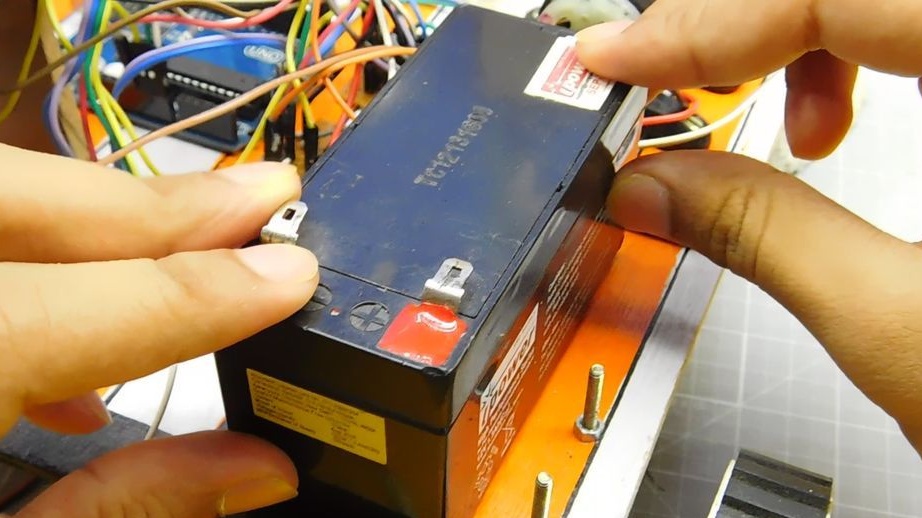
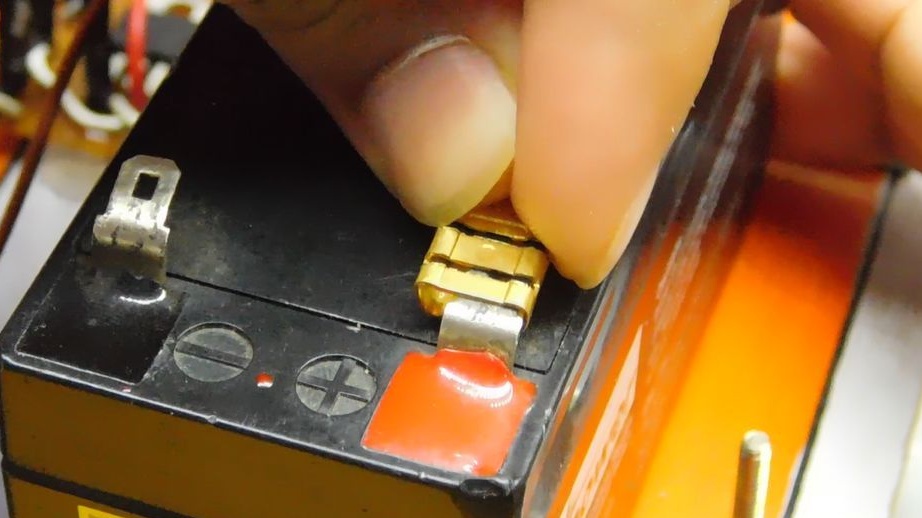
Étape huit: Batterie
Fixe, à l'aide de ruban adhésif double face, la batterie sur la plate-forme. Connecte des appareils électroniques à la batterie. Le maître Arduino conseille de se connecter via un diviseur de tension. Vous pouvez également ajouter un interrupteur au circuit.

Étape neuf: contrôler le robot
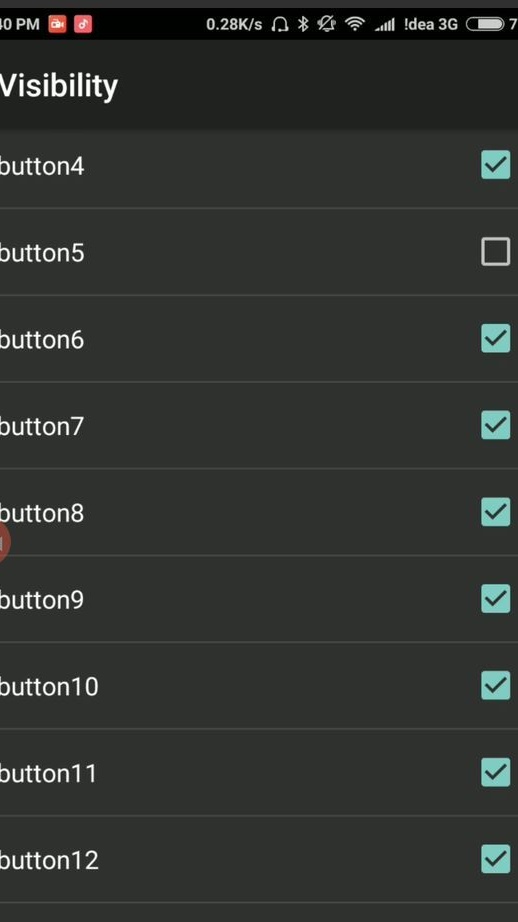
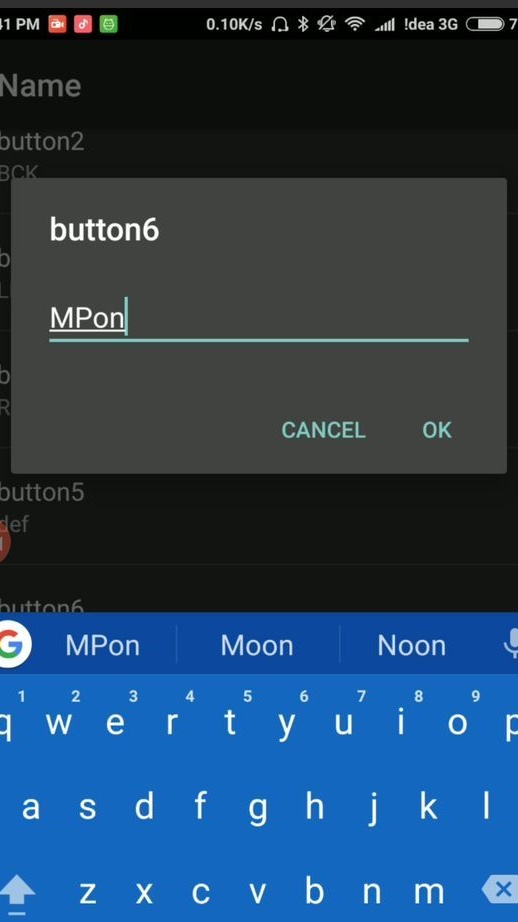
À partir de Google Play, l'assistant télécharge l'application «Bluetooth Serial Controller». Ouvre l'application. Accède à paramètres> visibilité. Désactive les boutons 5, 9, 12. Va aux noms. Attribue un bouton de 2-3 lettres à chaque bouton. Voir photo ci-dessous.
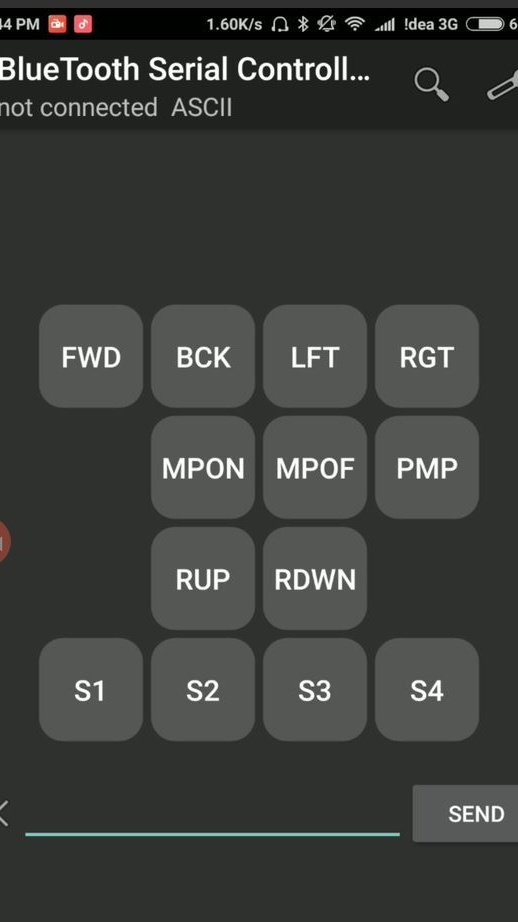
Ensuite, chaque bouton définit une commande (les guillemets doivent être supprimés, ne changez pas la casse):
Bouton 1 (FWD): 'F'
Bouton 2 (BCK): 'B'
Bouton 3 (LFT): 'L'
Bouton 4 (RGT): 'R'
Bouton 6 (MPON): 'M'
Bouton 7 (MPOF): «m»
Bouton 8 (PMP): 'P'
Bouton 10 (RUP): 'U'
Bouton 11 (RDWN): «u»
Bouton 13 (S1): '1'
Bouton 14 (S2): '2'
Bouton 15 (S3): '3'
Bouton 16 (S4): '4'
Dans les commandes d'arrêt> commandes, affecte des commandes uniquement à ces boutons:
Bouton 1: «S»
Bouton 2: «S»
Bouton 3: «S»
Bouton 4: «S»
Bouton 8: «p»

Reste maintenant à se connecter au module Bluetooth ("HC-05"), entrez le mot de passe (1234 ou 0000) et vous pouvez essayer de nettoyer la pièce -)))
Merci au maître-maître, et nous lui souhaitons d'améliorer le robot et d'en tirer un travail complètement autonome.
L'ensemble du processus d'assemblage du robot nettoyeur peut être vu dans la vidéo.