


Bonjour, aujourd'hui, je veux partager des instructions pour fabriquer un réservoir de jouets contrôlé par l'accéléromètre d'un téléphone Android. La base du réservoir sera en contreplaqué coloré de 3 mm d'épaisseur. Chenilles et motoréducteur à double engrenage de la célèbre société Tamiya. Produire des pièces de qualité et peu coûteuses.
Pour le réservoir, nous avons besoin de:
- Double vitesse Tamiya 70168
- Jeu de rouleaux et chenilles Tamiya 70100
- Tamiya 70157
- Contreplaqué 10 mm (une petite pièce)
- Arduino Pro Mini 5V AtMega 328
- DRV 8833
- Module Bluetooth HC-06 ou équivalent
- USB-UART pour le firmware Arduino
- LED rectangulaires rouges et vertes
- LED blanches 5 mm 2pcs.
- Résistances 3x 150 Ohms
- Batteries Li-ion 18650
- Connecteurs papa-maman Dupont
- Fils de différentes couleurs
- souder
- Colophane
- fer à souder
- Boulons 3x40, 3x20, écrous et rondelles pour eux
- 2x10 vis à bois
- Forets à bois 3 mm et 6 mm
- Scie à chantourner électrique
- Peinture acrylique
Étape 1 Assemblage du motoréducteur.
J'aime utiliser les motoréducteurs Tamiya. Ils sont acceptables, s'assemblent facilement. Le Tamiya 70168 a quatre options de construction. En fonction du rapport d'engrenage souhaité et de la position des arbres de sortie.
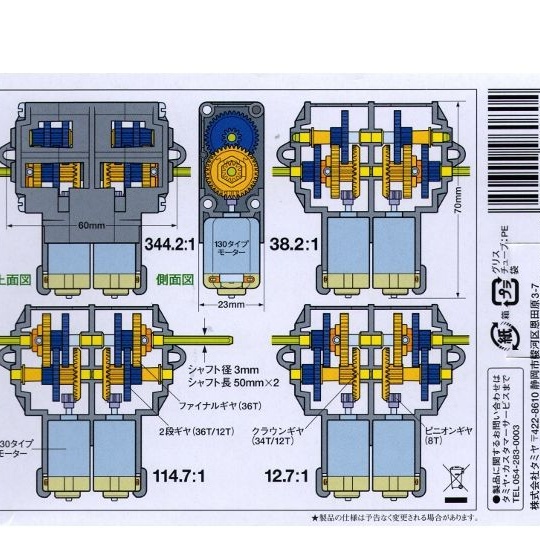
Des instructions détaillées sont incluses à l'intérieur de la boîte de vitesses. Nous avons besoin que les arbres de sortie soient plus proches des moteurs et le rapport de transmission 114,7: 1. Nous sélectionnons l'option dont nous avons besoin et collectons tout selon les instructions, à l'exception de l'installation des moteurs. Il est plus pratique de mettre les moteurs plus tard, de plus, les fils et les condensateurs doivent leur être soudés avant l'installation.
Étape 2 Production de parties du corps.
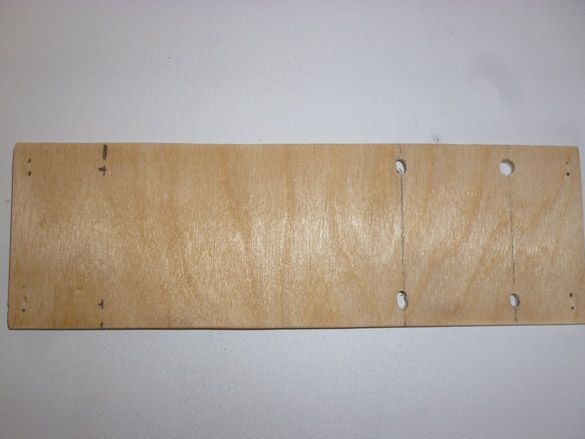
Le boîtier sera en contreplaqué de 3 mm d'épaisseur. Téléchargez l'image suivante et imprimez-la sur une feuille A4 à une échelle de 102%.
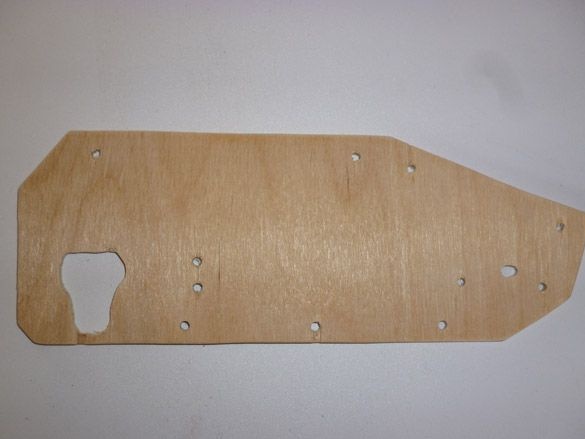
Maintenant, nous prenons deux morceaux de contreplaqué de taille suffisante, mettons l'un sur l'autre, appliquons notre photo sur le dessus. Des trous de 3 mm doivent être pratiqués dans les zones marquées d'un point gras. Pour que les deux parties soient identiques, nous forons d'abord une feuille et deux contreplaqués à l'un des points, y insérons un boulon et tournons l'image et deux morceaux de contreplaqué ensemble. Ensuite, le deuxième trou, et y insérer également un boulon. Après cela, nous forons tout le reste. Faites attention au trou le plus à gauche, il est nécessaire de lui donner une forme ovale. Cela est nécessaire pour contrôler la tension des pistes. Maintenant, nous prenons une scie sauteuse et découpons immédiatement deux parties latérales du boîtier, en suivant la ligne en gras de l'image. Deux de ces détails devraient se révéler:
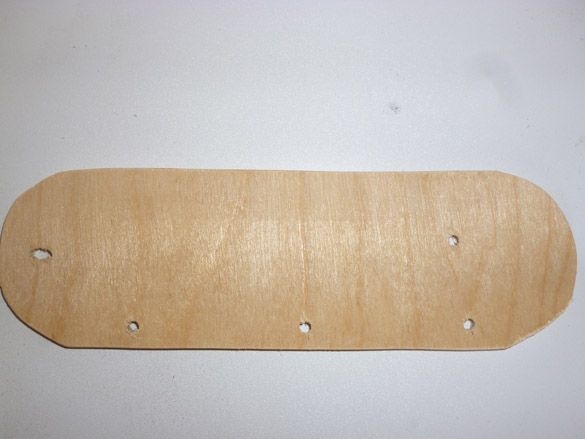
Ensuite, vous devez faire tout ce qui précède, mais cette fois, nous avons coupé deux détails couvrant les pistes. Il faut couper sur le petit ovale dessiné sur la photo. En conséquence, nous obtenons deux autres détails:
Maintenant, nous prenons une feuille de contreplaqué en une seule couche et coupons un rectangle avec des dimensions de 168 x 54 mm. Ce sera le fond de notre réservoir et la pièce à laquelle est fixé le motoréducteur:
Pour démarrer l'assemblage, nous avons besoin de tous les détails décrits ci-dessus:

Vous pouvez laisser tous les détails tels quels, mais je préfère les peindre. La peinture acrylique convient à la peinture. Il sèche rapidement et ne sent pas, ce qui signifie que vous pouvez peindre dans n'importe quelle pièce sans crainte d'empoisonnement. Donc, nous peignons les détails découpés:

Nous avons maintenant besoin de contreplaqué de 10 mm ou d'un bâton en bois approprié. Il faut couper un rectangle mesurant 54 x 15 mm et une épaisseur de 10 mm. Cette partie est nécessaire pour connecter le boîtier ensemble. Après avoir fait un rectangle, nous forons deux trous à une distance de 15 mm du bord, d'abord avec un foret de 3 mm, puis 6 mm, mais pas à travers et à travers, mais seulement la moitié de la profondeur. Insérez les écrous dans les trous obtenus et fixez-les avec de la colle. Nous avons besoin de quatre de ces détails:

Encore une fois, nous prenons du contreplaqué de 3 mm d'épaisseur. Coupez un rectangle de 107 x 60 mm. En reculant de 15 mm des bords du trou de forage de 3 mm, ce sera le couvercle supérieur:

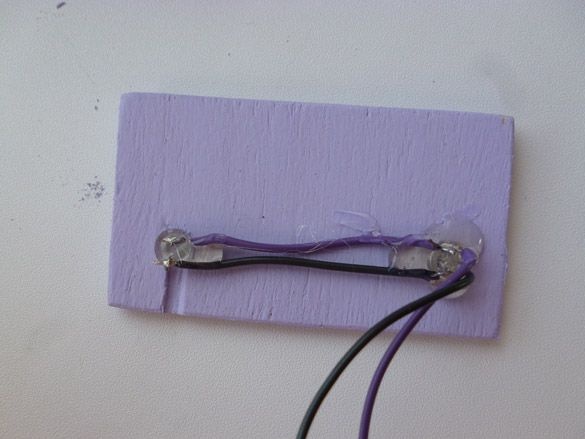
Nous avons coupé le rectangle suivant mesurant 33 x 60 mm. Soutenant à 15 mm des bords, nous forons deux trous d'un diamètre de 5 mm. Couper et dénuder une pièce nous la peignons. Ensuite, nous insérons des LED blanches de 5 millimètres dans les trous réalisés. Nous les soudons en parallèle et les fixons à l'aide d'un adhésif thermofusible:
Étape 3 Assemblage du boîtier.
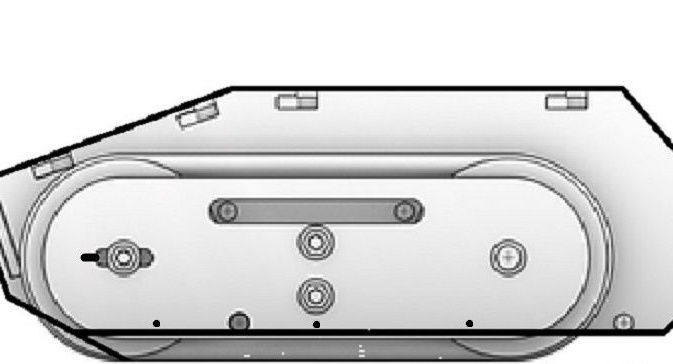
Après avoir préparé le motoréducteur et les pièces, nous procédons au montage de tout ensemble. Pour commencer, prenez la partie inférieure du boîtier et fixez-y le motoréducteur:
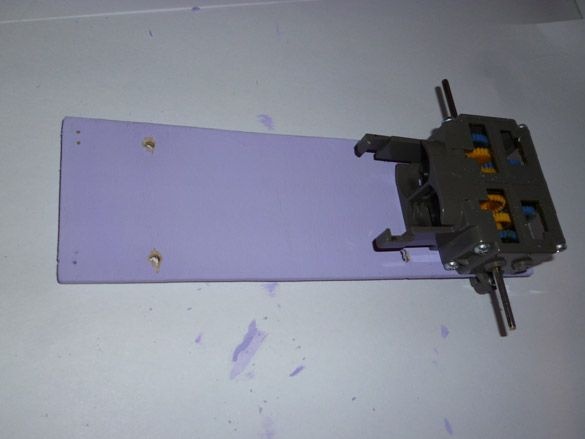
Et un peu plus gros:

Ensuite, nous fixons les parties latérales, en utilisant les coins d'un constructeur de fer pour enfants et des boulons 3x20 mm pour cela:

Maintenant, nous devons installer les pistes. Nous prenons les détails des pistes de fermeture. Nous insérons des boulons de 3x40 mm dans les trous. On met une grosse roue sur le boulon avant, sur les trois petites du bas, puis les rondelles et on serre les écrous, mais pas serrés, pour que tous les rouleaux tournent librement. Nous plaçons de grands pignons sur les arbres du motoréducteur. Nous combinons tous les boulons avec des rouleaux avec des trous sur les parties latérales. Après avoir passé les boulons, nous enroulons et resserrons les écrous de l'intérieur du boîtier. Nous mettons les rails, vérifions s'ils sont assez serrés. Les chenilles ne doivent pas s'affaisser, mais trop de tension les endommagera. Le réglage est effectué par la roue avant, en la déplaçant ou vice versa, en l'éloignant du motoréducteur. Après toutes les manipulations, nous obtenons:

Nous prenons les moteurs fournis avec les rouleaux et les chenilles. Nous soudons aux plots de contact du fil, et en parallèle avec eux un condensateur de 0,1 microfarad. Ensuite, installez les moteurs dans le motoréducteur:

Passons aux batteries. Nous soudons nos batteries Li-ion 18650 en parallèle et sortons les fils pour plus de commodité. Tordez-les avec du ruban électrique:

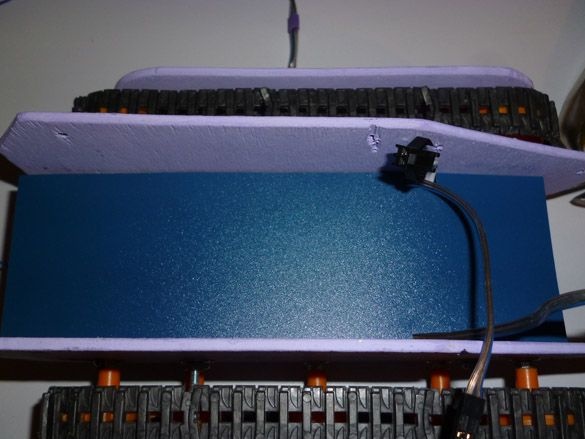
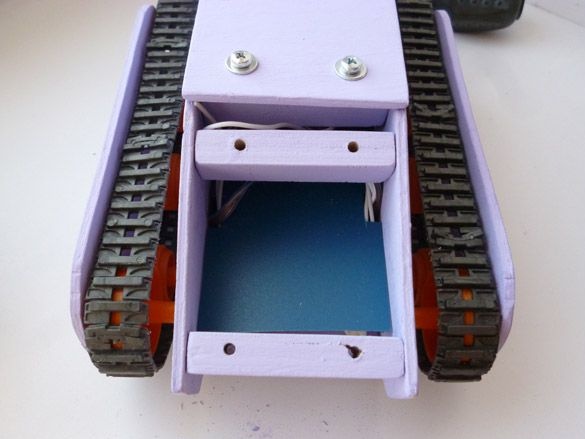
Nous les plaçons au fond du boîtier, à côté des moteurs:

Pour plus de commodité, ainsi que la séparation des éléments mécaniques et e pièces, découpez un rectangle de 100 par 54 mm en plastique fin ou en carton. Placez-le sur le motoréducteur et les batteries:
Nous prenons les attaches et les installons comme indiqué sur la photo. Nous fixons les parties latérales à l'aide de vis:
À l'arrière du réservoir, nous attachons des LED rectangulaires à de la colle chaude. Rouge et vert:

J'utilise également de la colle chaude pour fixer la partie avant avec les phares:

Étape 4 Électricité
Les moteurs électriques interfèrent avec leur fonctionnement et une chute de tension se produit lors du démarrage. Pour qu'à chaque démarrage des moteurs l'Arduino ne surcharge pas, on va diviser l'alimentation. L'Arduino est alimenté par une batterie 9 volts du type couronne et des moteurs à partir de batteries. Nous avons déjà placé les piles, nous placerons la couronne devant le réservoir:

Après avoir installé la batterie, fermez-la avec le couvercle supérieur:

Nous connectons tout ensemble selon le schéma:

Je vais vous expliquer un peu. Le moteur gauche via le pilote est connecté aux broches 5 et 6. Droite - à 9 et 10. Plus de la LED rouge à travers la résistance à 3 broches, moins à GND. Plus de la LED verte, également à travers la résistance, à 4 broches. Phares à 2 broches.
Le fonctionnement du module Bluetooth s'effectue via la bibliothèque SoftwareSerial.Nous utiliserons le port com du logiciel. Les contacts de connexion peuvent être modifiés dans l'esquisse. Nous connectons le module comme suit:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
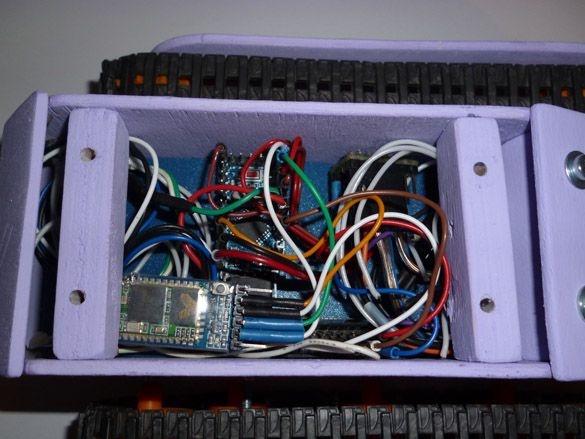
En mettant tout cela ensemble, nous plaçons un électricien dans la partie centrale:
Étape 5 Logiciel.
Pour travailler avec l'esquisse, vous devez télécharger l'IDE Arduino. Nous continuons et téléchargeons la dernière version:
Ensuite, vous devez ajouter la bibliothèque. SoftwareSerial devrait déjà être dans l'IDE Arduino. Mais juste au cas où, je le posterai:
Si l'IDE Arduino, lors de la compilation de l'esquisse, donne une erreur et jure sur la bibliothèque manquante, décompressez l'archive téléchargée dans le dossier «bibliothèques» situé dans le dossier avec l'IDE Arduino installé.
Étape 6 Préparez le module Bluetooth.
Les paramètres par défaut du module Bluetooth sont différents de ceux dont nous avons besoin. Par conséquent, vous devez d'abord établir la connexion du module Bluetooth avec l'ordinateur et modifier les paramètres. Remplissez le croquis Send_ AT_Bluetooth dans l'Arduino:
Arduino agira comme un lien entre Bluetooth et l'ordinateur. Lancez l'IDE Arduino, ouvrez le moniteur de port. Pour HC-06, sélectionnez 9600 dans les paramètres du moniteur de port, NL et CR ne sont pas nécessaires. Si une connexion Bluetooth n'est pas établie avec le module, il est en mode d'entrée de commande AT. Peut-être la première fois que le module ne répondra pas. Ensuite, essayez de le surcharger en déconnectant et reconnectant le fil plus. Toutes les commandes sont saisies sans guillemets, n'oubliez pas d'appuyer sur entrée pour envoyer. Nous entrons les commandes suivantes:
"AT" - sans guillemets, la réponse "OK" devrait venir.
"AT + NAME
«AT + BAUD7» - réglez la vitesse sur 57600.
«AT + RESET» - nous surchargeons le module.
Si quelque chose ne va pas ou si vous ne vous souvenez pas des paramètres:
«AT + ORGL» - ramène le module aux réglages d'usine.
Étape 7 Remplissez le croquis.
Après avoir configuré le module Bluetooth, remplissez le croquis principal:
Étape 8 Préparez votre téléphone Android.
Avant utilisation, assurez-vous que votre téléphone ou tablette Android dispose d'un accéléromètre. Pour commencer, ajoutez un appareil Bluetooth tanchika dans Android. Nous allons dans les paramètres Bluetooth, trouvons le module Bluetooth que vous avez nommé et connectez-vous. Le mot de passe pour la connexion est «1234» ou «0000», il peut être différent pour différents modèles. Installez maintenant le programme de contrôle. Nous aurons besoin d'une voiture RC Arduino Bluetooth ou d'un contrôleur BT. Les deux programmes sont gratuits, ils ont la possibilité de contrôler le périphérique Bkuetooth via l'accéléromètre et ils sont dans Google Play. Téléchargez le programme que vous aimez sur votre téléphone ou votre tablette. Dans le menu des paramètres du programme, entrez les commandes suivantes:
W - avant
S - arrière
A - gauche
D - à droite
F ou G– arrêt
K - phares
L - phare éteint
Vous pouvez également utiliser le joystick pour contrôler le réservoir. Il peut être fait selon mon autre instructions.
Et ajoutez-y un module Bluetooth, en suivant un autre instructions.

