L'article expliquera comment fabriquer un vibro-robot miniature fais-le toi-même. Ces des robots lorsqu'ils sont allumés, ils commencent à danser sur une surface lisse, enroulant des cercles sur la table. En effet, un poids déséquilibré est installé sur le moteur, ce qui crée des vibrations. Tout le monde peut assembler un tel robot à la maison, cela nécessite un minimum de compétences et de matériel.
Plus précisément, cette le modèle Le robot s'appelait Itty Bitty. Ici, un moteur vibro d'un ancien téléphone mobile est utilisé ici, et le robot est alimenté par une pile d'horloge 3V.
Matériaux et outils pour créer un robot:
- Batterie plate 3V;
- moteur de vibration d'un ancien mobile;
- un grand trombone;
- fer à souder avec soudure et flux;
- ruban électrique;
- colle chaude;
- marqueur de couleur foncée.

Parmi les outils dont vous avez besoin, une lime, de l'alcool et une pince.
Le processus de fabrication du robot:
Première étape. Créez les jambes du robot
La création des jambes du robot est le moment le plus crucial de tout cela. Le fonctionnement de l'ensemble du robot dépendra de la façon dont ils sont correctement fabriqués. Tout d'abord, les jambes doivent être solides, car avec les vibrations, le robot sautera assez fortement. Ils sont fabriqués à partir d'un seul morceau de fil. Un trombone est le mieux adapté à ces fins. Tout d'abord, il doit être redressé puis divisé en 6 parties égales. En conséquence, la longueur de chaque pièce individuelle sera de 1/16 de pouce.



Un point important lorsque vous travaillez avec un trombone est la fluidité du mouvement. Si vous pliez le clip trop rapidement, il peut se casser. Si les angles dépassent 90 degrés, ils doivent être arrondis.
Maintenant, vous devez prendre une marque et plier le clip à 90 degrés à cet endroit, à l'autre marque, vous devez vous pencher dans la direction opposée. Si l'extrémité du clip est arrondie pendant le pliage, cela réduit considérablement la probabilité d'une fracture.



Sur la troisième marque, vous devez faire un coude à 90 degrés, mais l'emplacement du coude doit être aussi éloigné que possible de la fin.
À la quatrième marque, un virage de 180 degrés est fait, la fin doit être derrière.
Une flexion de 90 degrés est effectuée sur la cinquième jambe, et elle doit être aussi éloignée que possible des deux autres jambes adjacentes. En conclusion, les jambes doivent être ajustées pour que tout le monde ne touche pas uniformément le sol.


Deuxième étape Installation du moteur
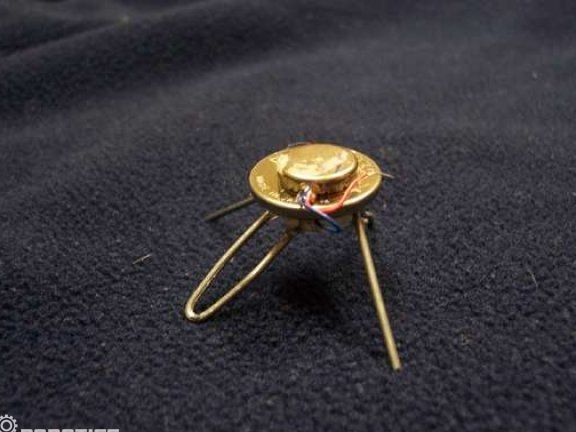
La batterie agit comme un élément de support dans un tel robot. Vous devez prendre un tremblement et y coller un vibromoteur. Après cela, l'un des fils du moteur doit être soudé au contact de la batterie, ce sera le contact supérieur. Afin de fixer la soudure, la batterie doit être légèrement rayée, cela peut être fait avec un fichier.

Troisième étape Collez les jambes
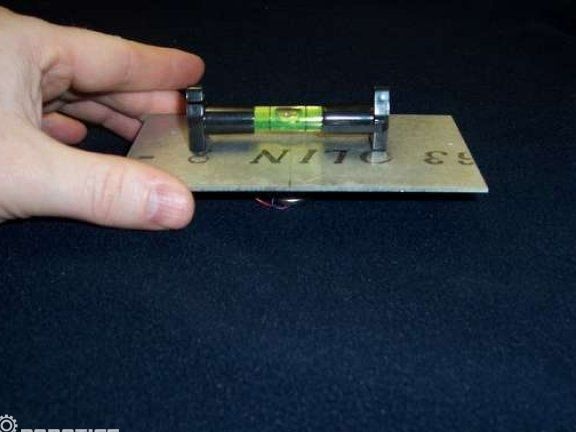
Il ne reste plus qu'à coller les jambes au robot. Pour ce faire, vous devez mettre la batterie sur la table et, au-dessus, mettre les jambes du robot. Ensuite, les jambes doivent être enfoncées; pour cela, un niveau linéaire ou un morceau d'aluminium peut être appliqué sur les jambes. Avant d'appliquer de la colle, il est conseillé de dégraisser la surface de la batterie avec de l'alcool. Il n'est pas nécessaire de regretter la colle, car lors des travaux sur les jambes, une force suffisamment importante agit. Si vous collez mal les pieds, le robot peut se désagréger pendant le fonctionnement.
Pas besoin de se précipiter pour faire fonctionner le robot, la colle doit être solidifiée. L'auteur recommande de mettre la pièce au réfrigérateur, pour que la colle sèche plus rapidement.


C'est tout, le robot est prêt et vous pouvez le vérifier. Pour allumer le robot, vous devez prendre un morceau de ruban électrique et coller le deuxième fil du moteur à la borne de la batterie. En plaçant le robot sur une table lisse, vous pouvez maintenant observer ce qu'il fera.