

Les pultoïdes sont appelés de tels robots qui peuvent être contrôlés à distance à l'aide de la télécommande. Par exemple, une télécommande de télévision peut être utilisée à ces fins. La tâche principale que l'auteur s'est donnée dans la fabrication d'un tel robot est la simplicité de son assemblage. Considéré le robot ne nécessite pas la fabrication d'une carte de circuit imprimé, l'installation est très simple et se produit uniquement sur du carton.

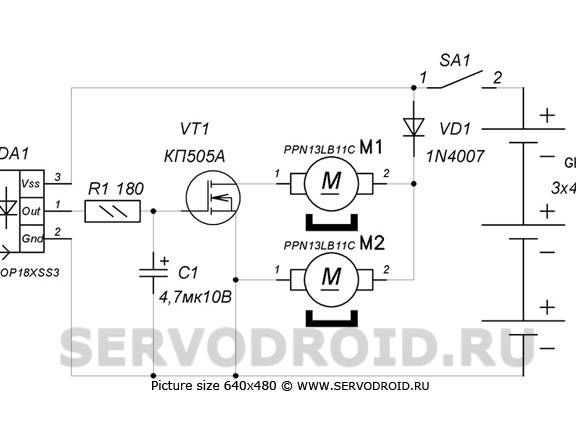
Électronique Le circuit du robot se compose de seulement quatre composants: une diode, un transistor, un photodétecteur et un condensateur. Pour la fabrication de la pièce mécanique, un minimum de matériaux sera également nécessaire, par exemple, un CD-ROM est utilisé pour réaliser le boîtier.
Un robot ainsi conçu ne comprendra qu'une seule équipe. Il vaut la peine d'appuyer sur n'importe quel bouton du panneau de commande et le robot commencera à tourner. Si vous continuez à maintenir le bouton, l'angle de rotation deviendra plus grand, en conséquence, le robot peut tourner à 360 degrés.
Appareil robot
Un disque compact est utilisé comme base pour la fabrication du robot. Quant aux éléments de puissance, ils sont fixés à l'aide de boulons M2. La carte électronique, également le compartiment des piles, est fixée à l'aide de ruban adhésif.
En ce qui concerne les moteurs, ils sont situés à un angle et leurs arbres reposent contre la route. Ainsi, il n'est pas nécessaire de fabriquer séparément les roues. Les boulons sont fixés à l'aide de cadres constitués d'une ligne d'école.
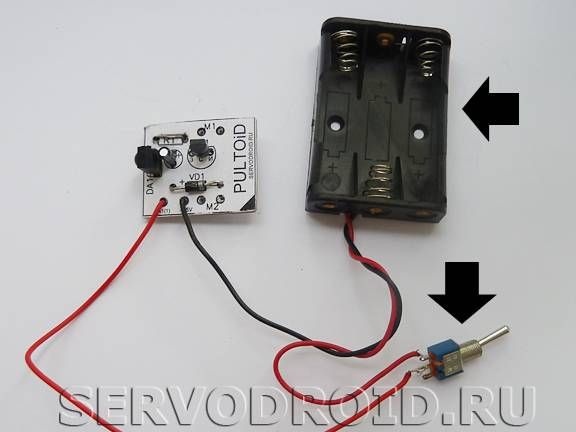
Trois batteries "petit doigt" alimentent le robot, elles sont installées dans un boîtier spécial. Au total, l'alimentation produit 4,5 V.
Et enfin, le photodétecteur, il n'en est qu'un ici, c'est le type TSOP. Il reçoit des signaux modulés de n'importe quelle télécommande, grâce auxquels le robot peut être contrôlé.
Matériaux et outils de fabrication:
- liens en nylon;
- photodétecteur type TSOP1836;
- un transistor à effet de champ (KP505A);
- un disque compact;
- fular pour les batteries en trois sections;
- trois "petites" batteries;
- règle en plastique;
- vis pour fixer le cadre;
- fils et interrupteur (type croisé).
Processus de fabrication:
Première étape. Conception de PCB
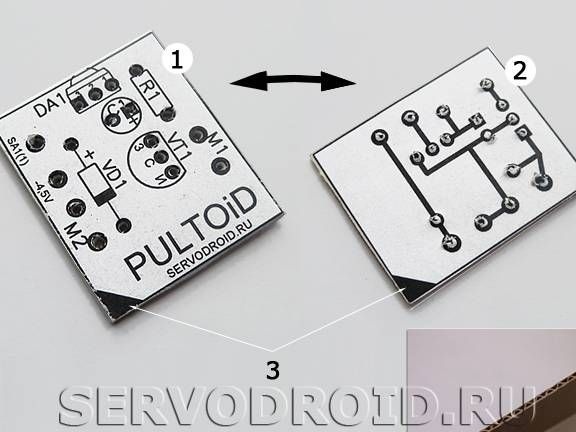
Pour faire une carte de circuit imprimé, vous devez d'abord imprimer un dessin sur papier. Vous devriez obtenir deux images, sur un dessin d'installation et de l'autre côté de la carte. Au total, le panneau sera composé de trois éléments, au centre il y aura un carton ondulé collé avec du papier de bureau des deux côtés. Pour coller la planche, il est recommandé d'utiliser un bâton de colle sèche.
Deuxième étape Installation de composants radio
Lors de l'installation de composants électroniques, il est important de ne pas oublier ou couper les bords saillants des contacts. Par la suite, ils seront pliés, et donc un circuit électrique sera créé. Tous les éléments sont connectés par soudure selon le schéma spécifié.
La résistance R1 du circuit doit être remplacée par n'importe quel cavalier. Quant au photodétecteur, l'ordre correct de sa connexion est également indiqué sur la photo.

Troisième étape Installation du châssis électrique
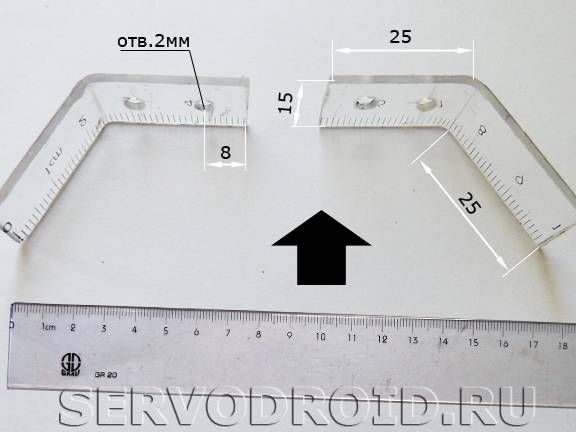
Pour installer les moteurs, vous devrez créer un cadre de puissance. Comme matériau, une règle d'école en plastique sera utilisée ici. Il doit être coupé en deux parties et plié comme indiqué sur la photo. Pour que la règle commence à se plier, vous devez amener la pointe du fer à souder chaud à un endroit de déviation à une distance d'environ 2 mm. Aussi à ces fins, vous pouvez utiliser un sèche-cheveux de construction. La règle doit être pliée en douceur à un angle d'environ 30 degrés.

Une fois le cadre créé, vous pouvez procéder à son installation. Pour ce faire, prenez le CD et les vis 2 mm avec écrous. De plus, des trous d'un diamètre d'au moins deux millimètres sont percés aux bons endroits et le cadre est fixé avec des vis. Pour que le cadre ne glisse pas, avant de l'installer, vous devez coller du ruban adhésif double face sur le disque.
Quatrième étape Installation du support avant
À l'avant du disque, vous devez percer deux trous et préparer une chape en nylon. La taille de la chape doit être de 3x150 mm. Il doit être inséré comme indiqué sur la photo. En conséquence, le support résultant se dépréciera parfaitement pendant le fonctionnement du robot et glisse le long de la route.


Cinquième étape Installation du moteur
Afin d'empêcher les arbres à moteur de glisser le long de la route, des protections doivent être placées dessus. Ils sont fabriqués à partir de gomme, que l'on retrouve sur les pâtes des stylos à hélium. Pour installer les moteurs, vous devez d'abord coller un morceau de ruban adhésif double face sur le support, cela évitera de glisser. Eh bien, les moteurs sont finalement fixés avec des attaches en nylon.

Étape six Connexion interrupteur et alimentation
Comme source d'alimentation, vous pouvez utiliser n'importe quelle batterie dont le courant ne dépasse pas 5 volts. Dans ce cas, un boîtier est utilisé pour trois piles de doigts, qui totalisent 4,5 V.
Quant à l'interrupteur, il est monté sur l'entrefer du contact positif provenant de la source d'alimentation. Le fil rouge est attaché à la carte à la broche SA1 (1) et le fil noir à la broche -4,5V.


Toujours à ce stade, vous pouvez connecter les moteurs, leurs fils sont connectés aux contacts M1 et M2.
Septième étape. Étape finale
Au stade final, tous les éléments électroniques doivent être réparés. Ils sont attachés au disque à l'aide de ruban adhésif double face. Quant au commutateur, il doit également être réparé, pour cela, vous pouvez utiliser de la colle chaude.

C'est tout, maintenant le robot est prêt. Vous pouvez essayer de l'allumer et donner une commande pour l'allumer à l'aide de n'importe quelle télécommande.