
Matériaux et outils:
- microcontrôleur Arduino (dans ce fait maison applique Arduino Uno Rev 3);
- Deux servos de Parallax;
- joystick (également de Parallax);
- circuit imprimé) petit);
- connecteurs pour connexion;
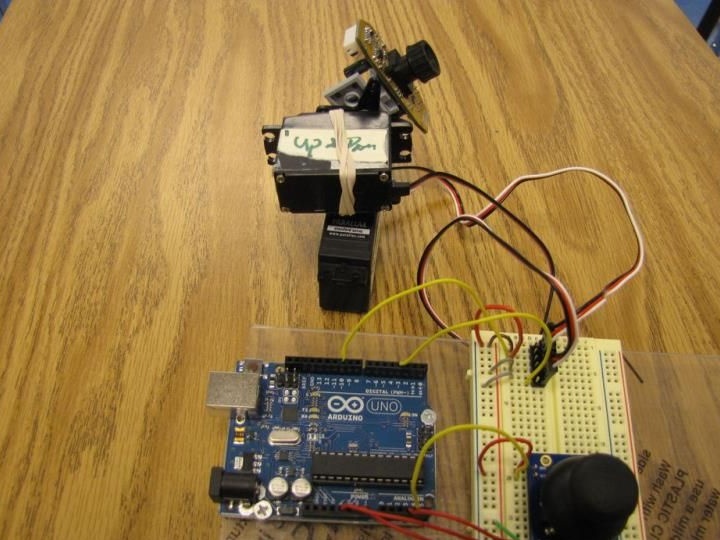
- Un appareil pour suivre le mouvement des servomoteurs (une webcam cassée et des cubes lego ont été utilisés).
Processus d'assemblage maison:
Première étape. Nous connectons des servomoteurs
Le processus d'assemblage fait maison commence par la connexion des servomoteurs. Afin d'assembler une disposition préliminaire, une carte de circuit imprimé est utilisée. Ensuite, il sera possible de faire un bouclier séparé. Dans la figure, vous pouvez voir exactement comment tout est connecté.
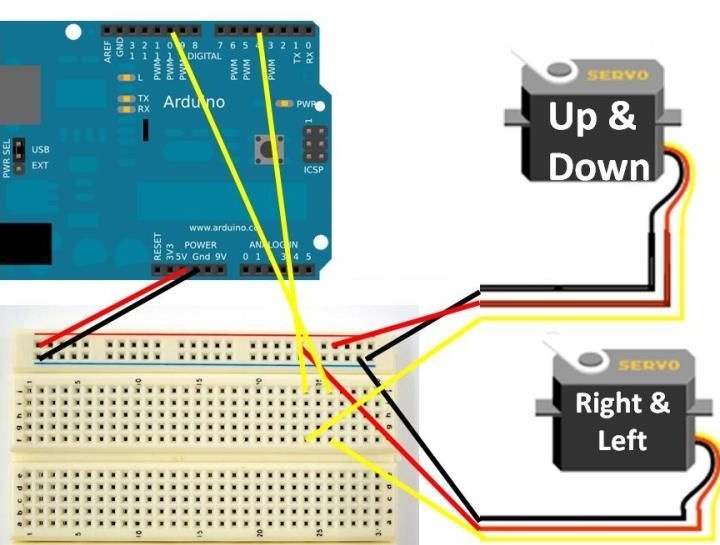
Le câble rouge est l'alimentation, il se connecte à la broche 5V sur le contrôleur Arduino.
Le fil noir est un moins (masse), il se connecte à la sortie Arduino appelée GND.
Le câble jaune du servomoteur droit et gauche doit être connecté à la broche 11. Sur certains modèles, il peut être blanc.
Un câble jaune Up & Down similaire doit être connecté à la broche 4. Il peut également être blanc sur certains modèles de moteur.
Il est important de se rappeler que les connecteurs de signaux utilisés pour contrôler le moteur proviennent des sorties PWM.
Deuxième étape Connectez le joystick
La manière dont le joystick est connecté est visible sur l'image. Au début, le schéma peut sembler assez compliqué, mais en fait il n'y a rien de compliqué ici. Comme pour les moteurs, une carte de câblage est utilisée ici.
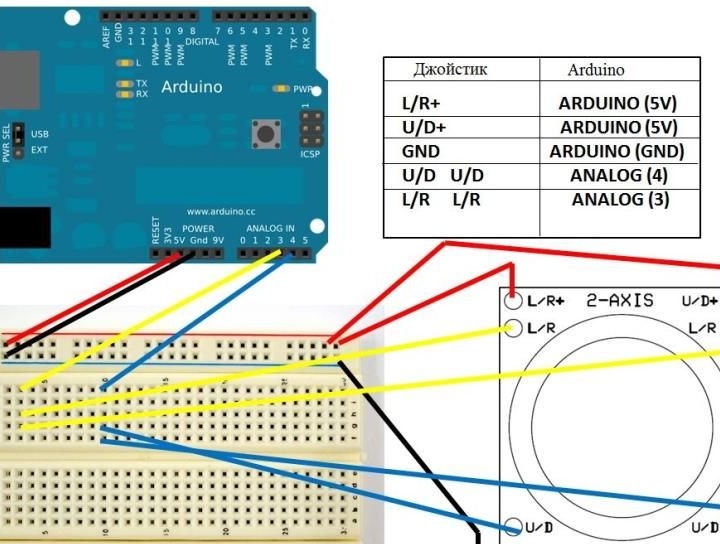
1. Sur le module joystick, vous pouvez trouver les sorties U / R + et L / R +. Par ces sorties, l'alimentation est connectée. En conséquence, vous devez appliquer une tension + 5 V de la broche correspondante à l'Arduino.
2. Il y a également deux connecteurs sous le joystick appelés L / R et deux connecteurs U / D. Ils doivent être connectés aux sorties analogiques A3 et A4.
3. Eh bien, en conclusion, la terre sur le joystick doit être connectée à la terre sur l'Arduino.
Après l'assemblage, la connexion doit être revérifiée. C'est à cause d'erreurs de connexion que dans la plupart des cas, des problèmes surviennent. Cela est particulièrement vrai lorsqu'une carte de circuit imprimé est utilisée et qu'il y a de nombreuses connexions dessus.
Troisième étapeCroquis pour Arduino
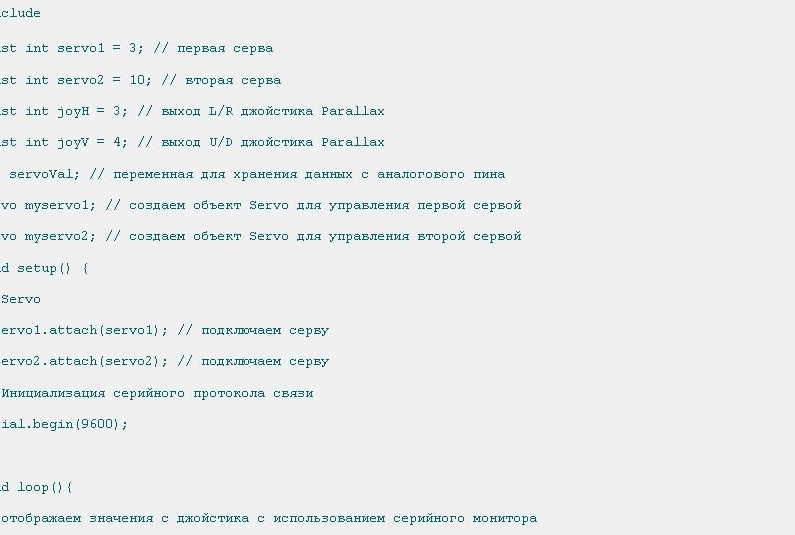
Le code est très simple et contient des commentaires détaillés. Le code ci-dessus doit juste être copié dans l'IDE Arduino. Une fois le code chargé, les moteurs ne doivent plus bouger. Ils ne devraient commencer à bouger que lorsque le bouton du joystick est enfoncé.
Problèmes qui peuvent survenir et comment les résoudre
1. Si les moteurs ne tournent pas, revérifiez la connexion. Les sorties PWM sont utilisées pour connecter les moteurs et les sorties analogiques sont utilisées pour connecter les joysticks.
2. Il arrive qu'immédiatement après le chargement du code, les moteurs commencent à vibrer. Cela se produit si vous connectez incorrectement les broches U / D + L / R +. La connexion doit être soigneusement vérifiée. Afin de ne pas brûler la carte pendant le test, elle doit être déconnectée de l'ordinateur.
3. Si tout est revérifié, mais que les moteurs ne veulent toujours pas fonctionner, vous pouvez essayer de reconnecter le joystick. Il doit être retiré de la carte de circuit imprimé, puis réinstallé avec un certain effort. Les connecteurs du joystick devraient bien entrer dans la disposition.
Si tout s'est avéré, vous pouvez maintenant commencer à créer des articles faits maison avec contrôle via le joystick. Par exemple, vous pouvez créer un robot qui peut être contrôlé avec un joystick, et bien plus encore.