

Vidéo de travail du robot
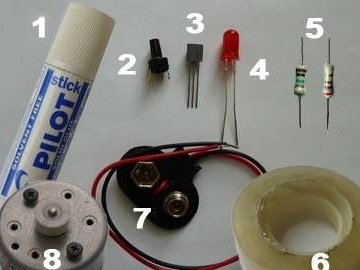
Matériaux et outils pour créer un robot:
- bâton de colle sèche;
- ruban transparent;
- bouton à deux broches non fixe;
- une LED clignotante type ARL-513URC-B;
- transistor type KP505A;
- deux résistances d'une valeur nominale de 1M et 270 Ohms;
- clip-connecteur pour connexion à une batterie de type "Crown";
- modèle de moteur RF-300CA-D / C 3V ou similaire.

Fonctionnalité et caractéristiques du robot:
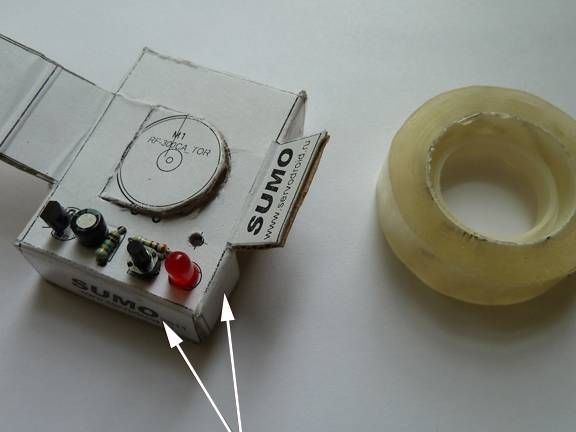
Sur la photo, vous pouvez voir déjà assemblé le robot. Pour déplacer l'appareil, un seul moteur est utilisé, il est installé verticalement, mais sous un certain angle. Lorsqu'il se déplace dans un segment court, le robot se déplace en ligne droite et crée un arc sur une section plus longue.
Un bouton est utilisé pour allumer le robot; lorsqu'il est enfoncé, le robot s'allume pendant 20 secondes. Après cela, un arrêt automatique se produit et le robot est en mode veille jusqu'à la prochaine activation.
Une autre caractéristique du robot est qu'il s'arrête automatiquement au bord de l'anneau. La réalisation de cette condition est possible si le poids de l'adversaire n'est pas inférieur au poids du robot et l'épaisseur de l'anneau n'est pas inférieure à 3 mm.
Ici, une batterie de 9 volts est utilisée comme source d'alimentation, elle est montée sur le dessus du robot. Grâce au poids supplémentaire, le robot accumule l'énergie cinétique nécessaire pour les actions nécessaires.
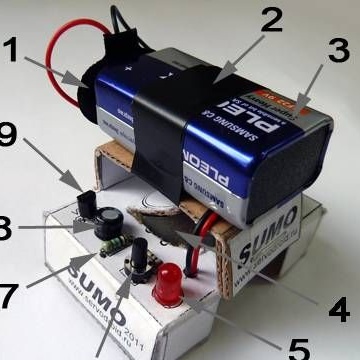
Dans l'image, les composants du robot sont marqués par des nombres:
1. Clip pour connecter la batterie.
2. Loquet de la batterie.
3. Alimentation (pile 9 V).
4. Le moteur.
5. LED clignotante (indique que l'alimentation est connectée).
6. Bouton pour allumer le robot.
7. Résistance, grâce à elle, vous pouvez régler l'heure du robot.
8. Condensateur, il est également responsable du temps du robot.
9. Transistor type KP505A, c'est un pilote de moteur.
Processus d'assemblage du robot:
Première étape. Nous plaidons
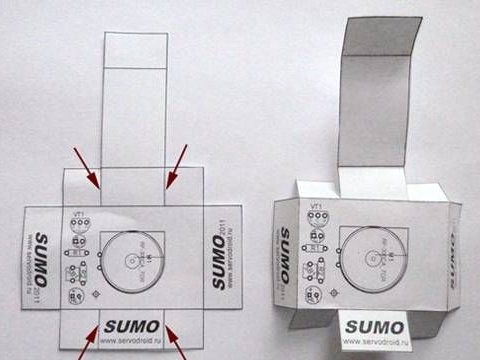
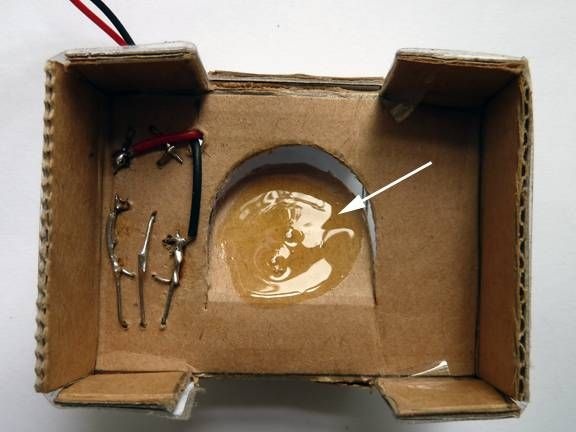
Pour faire le cas, l'auteur utilise un carton ondulé, vous devez lui appliquer un contour selon le modèle. Le modèle peut être imprimé sur une imprimante, il est attaché à l'article. De plus, après avoir fait les plis nécessaires, le motif peut être coupé le long de lignes épaisses. Pour installer le moteur, vous devez couper un demi-cercle dans le carton, puis le plier un peu, comme indiqué sur la photo.


Deuxième étape Installation d'éléments radio
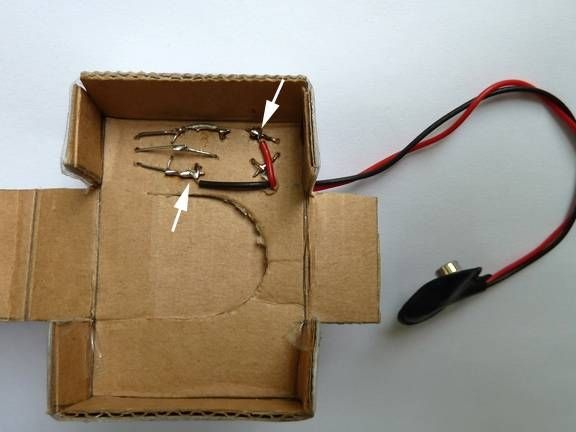
À l'étape suivante, vous devez installer tous les éléments radio nécessaires. Pour ce faire, vous devez prendre un poinçon et faire des trous dans le carton, ils doivent être faits en marques rondes. Pour réparer les composants, après avoir installé leurs conclusions, vous devez légèrement les plier. Vous pouvez également voir la marque sous la forme d'une vue sur le carton, ici vous devez faire un grand trou, un fil d'alimentation le traversera.
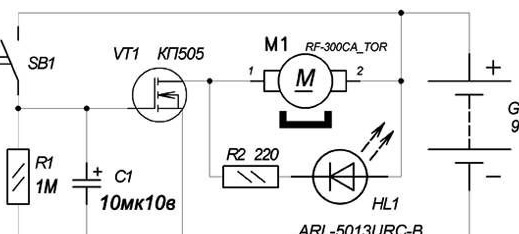
Après cela, vous pouvez prendre un fer à souder et commencer à connecter les contacts des éléments radio conformément au schéma.





Troisième étape Nous fixons les surfaces latérales inférieures
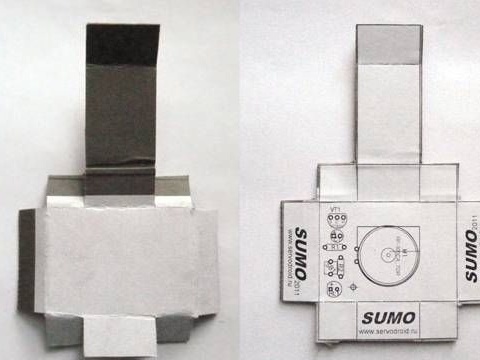
À ce stade, les surfaces latérales inférieures peuvent être jointes. Pour ce faire, vous devez plier les plans inférieurs, puis les fixer avec du ruban transparent. Également sur la photo, vous pouvez voir les éléments du boîtier inclinés vers le haut, ils sont nécessaires pour réparer la batterie.


Quatrième étape Connecter des périphériques
Pour connecter l'alimentation à la batterie, vous devez utiliser un connecteur à clip. Le fil doit être passé à travers le trou, le rouge est soudé au contact positif de la LED et le noir au moins du condensateur C1.
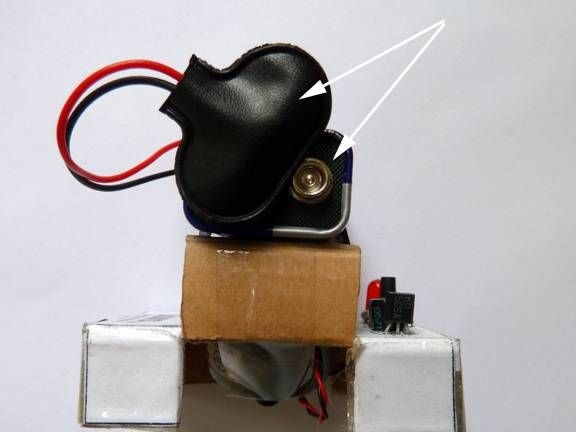
Ensuite, vous devez connecter les surfaces latérales gauche et droite, en conséquence, la lettre "P" doit être obtenue. Pour une fixation fiable des éléments, un support d'une agrafeuse est utilisé. L'endroit où installer les supports est indiqué par une flèche blanche. Les pinces peuvent être serrées avec une pince.


Cinquième étape Installer et connecter le moteur
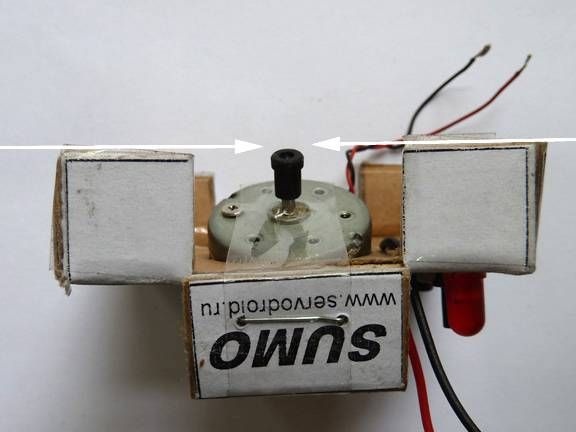
Pour que le robot se déplace tout droit, son arbre doit être à un certain angle par rapport à la surface. En d'autres termes, le robot se tiendra sur les parties latérales et son arbre ne sera en contact qu'avec la surface. Pour que l'arbre du robot ait une bonne adhérence, vous devez mettre une bande élastique dessus, il peut s'agir d'un tambour ou d'un élément de retenue en caoutchouc provenant d'un stylo à hélium.
Le moteur est monté sur de la colle, le lieu de lubrification est marqué d'une flèche blanche. Après avoir appliqué la colle, vous devez attendre un peu qu'elle devienne visqueuse, sinon de la colle liquide peut pénétrer dans le moteur et la ruiner.
Pour une fixation supplémentaire, le moteur est enveloppé de ruban adhésif.


Quant à l'angle du robot, alors tout cela est clairement visible sur les photos. Après l'installation, le moteur doit être connecté. Une broche est connectée au moins, et l'autre au drain du transistor VT1.


Étape six La dernière étape de l'assemblage
La batterie est montée sur un châssis en U, la batterie est fixée à l'aide de ruban électrique. Le cadre est pensé de telle sorte qu'en plus du support, il soit également un amortisseur pour la batterie. Si le robot doit être complètement déconnecté de l'alimentation, vous pouvez déconnecter un fil de la batterie.
Eh bien, en conclusion, pour la compétition, vous aurez besoin d'un anneau, il est fabriqué en deux couches, avec une épaisseur d'au moins 3 mm. Si cette condition n'est pas remplie, le robot ne pourra pas s'arrêter au bord de l'anneau. Le diamètre de l'anneau doit être de 250 mm. La couche inférieure est constituée d'un mince carton ondulé et la partie supérieure d'un carton mince noir. Les deux couches doivent être collées ensemble. Le montage est terminé, vous pouvez lancer la compétition. Le gagnant est le robot qui reste dans le ring.