

L'article examinera un exemple de création d'un robot légendaire appelé "Canbot". La majeure partie des détails du robot est imprimée sur une imprimante 3D. Le robot est contrôlé à distance.
Matériaux et outils pour fait maison:
- Un microcontrôleur Atmel Attiny85;
- deux microservices HXT900 ou leurs analogues;
- une batterie LiPo de 3,7 V;
- un récepteur infrarouge à 38 kHz;
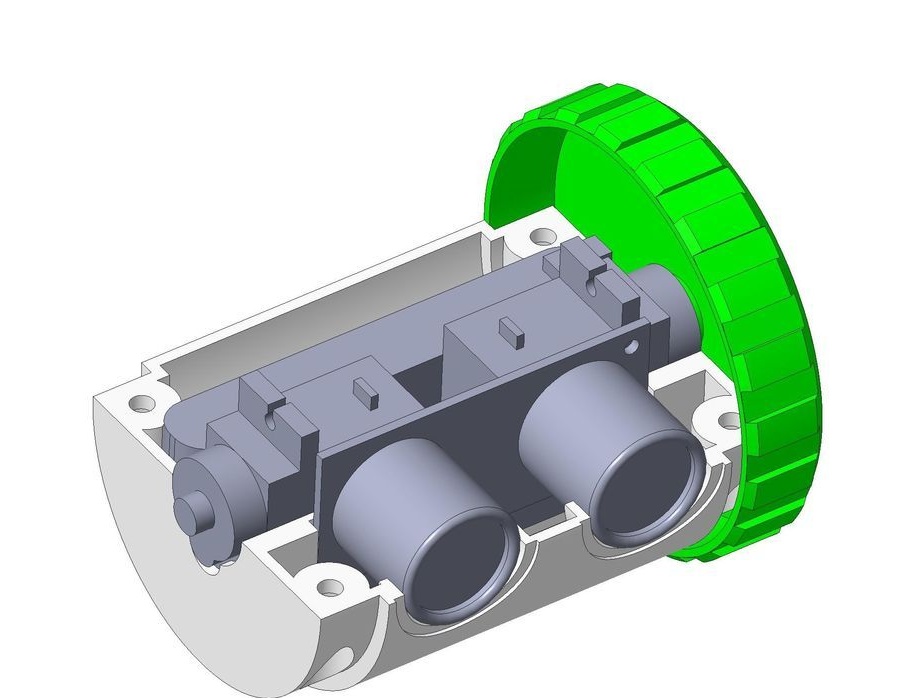
- transducteur à ultrasons type HC-SR04;
- Interrupteur ou cavalier 9x4 mm à la place;
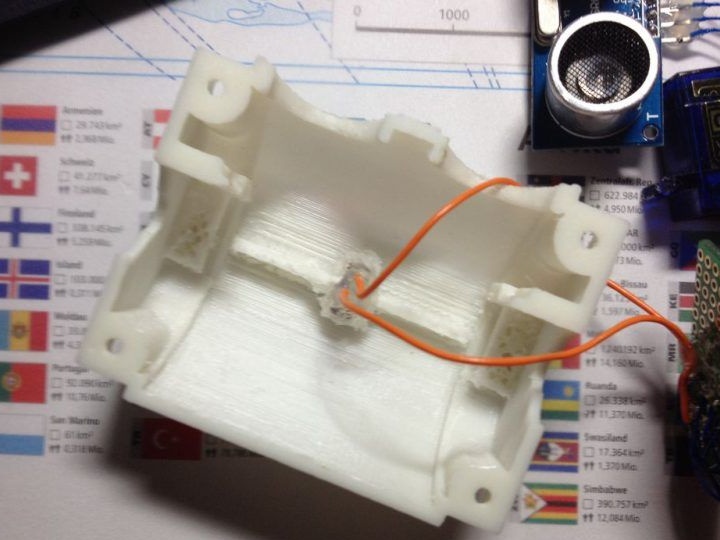
- Pièces 3D (possibles). Il faudra un haut (top.stl), un bas (bottom.stl) et deux roues (wheel.stl).
Bien sûr, des outils de soudage, de la colle chaude, des tournevis, des vis, des fils et d'autres petites choses seront nécessaires.

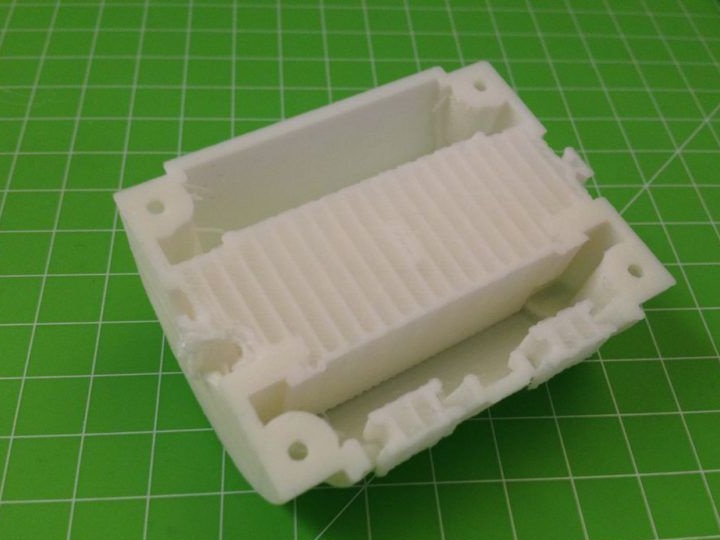
Les parties supérieure et inférieure devront être imprimées à plat vers le bas à l'aide de l'option «structures de support». Selon le type d'imprimante utilisé, les pièces finies peuvent devoir être nettoyées à la fin.
Le processus de fabrication du robot:
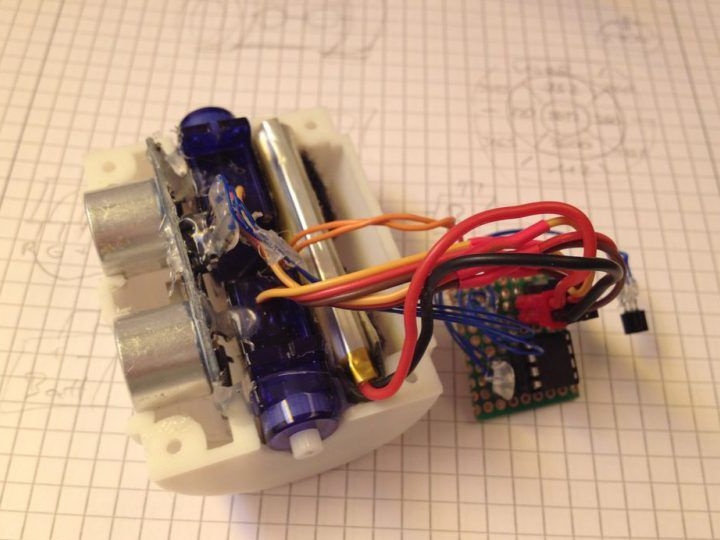
Première étape. Électronique une partie du robot
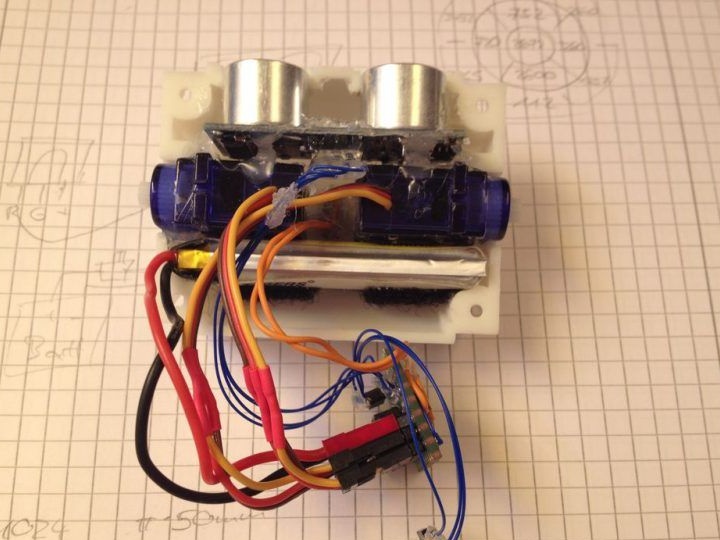
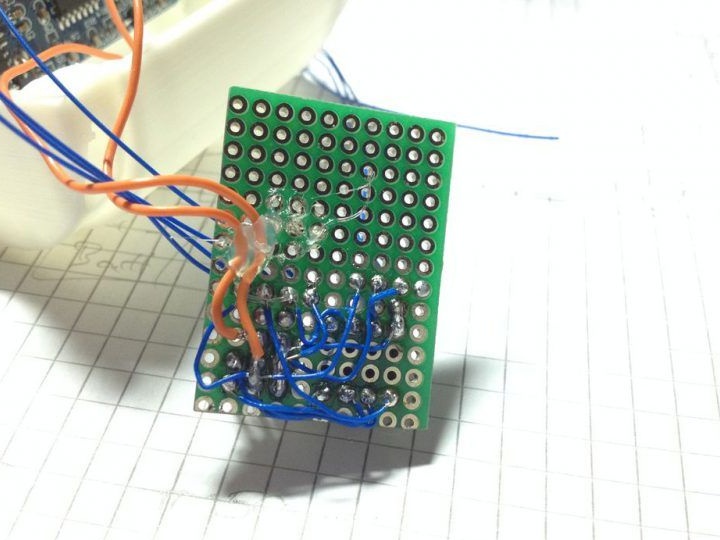
Vous devez d'abord configurer les servos, ils doivent être convertis en rotation continue. Comment faire, il y a des tonnes d'instructions sur Internet. Eh bien, tous les éléments électroniques devront être assemblés comme indiqué dans le schéma. Pour assembler la partie électronique était pratique, vous pouvez prendre un petit morceau d'une planche à pain, ainsi que des fils fins.


Deuxième étape La partie logicielle du robot
Si vous abordez le processus de création d'un robot avec le plus grand professionnalisme, la partie logicielle peut être écrite de manière indépendante. Mais pour cela, vous devrez apprendre un langage de programmation. Dans une version plus simple, vous pouvez télécharger du code prêt à l'emploi et simplement le télécharger sur le microcontrôleur.
Selon l'auteur, le meilleur le robot reçoit les signaux infrarouges des télécommandes de marque Sony. À l'avenir, il sera nécessaire de «reflasher» la partie du code Arduino et sortir les données via la fonction Serial.print (). En conséquence, il sera possible de savoir quel est l'encodage sur chaque bouton.
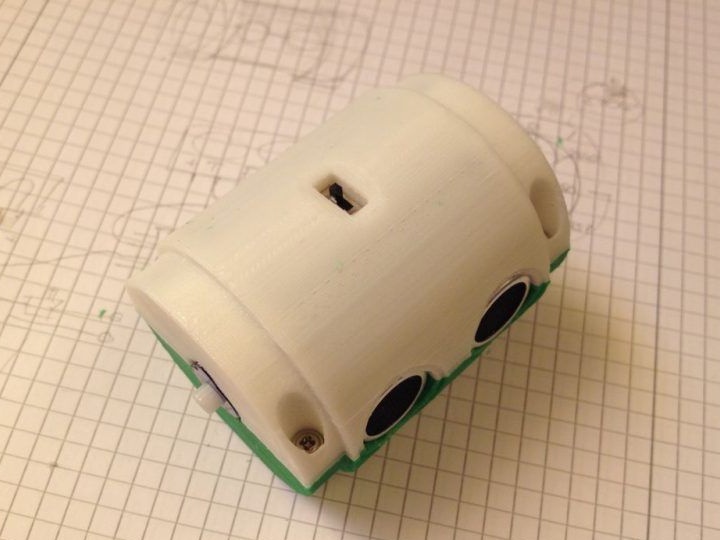
Troisième étape L'étape finale. Assemblez le robot
Eh bien, en conclusion, le robot s'en va. À ces fins, vous aurez besoin de colle chaude. Avec lui, vous devez fixer les fils afin qu'ils ne se détachent pas lorsque le robot se déplace.Il est également nécessaire de fixer l'interrupteur et de bien fixer le capteur à ultrasons. En conclusion, les couvercles du robot sont connectés à l'aide de quatre vis, de sorte que, si nécessaire, il peut être facilement démonté. Soit dit en passant, les vis pour servos sont parfaites pour le montage.

C'est tout, maintenant le robot est presque prêt. Il reste à installer les roues sur les arbres du servomoteur et vous pouvez commencer à tester le robot. Vous pouvez voir plus en détail comment le travail fait maison sur la vidéo.