Aujourd'hui, je veux partager mon prochain fait maison. Il est basé sur Lego et Arduino. Pour le contrôle, nous utiliserons une télécommande avec un émetteur 433 MHz. Cette fois, je voulais faire une course une voiture. Continuez:
- Lego Technic 42022
- Arduino Nano
- DRV 8833
- Servo SG-90
- Module de communication radio 433 MHz
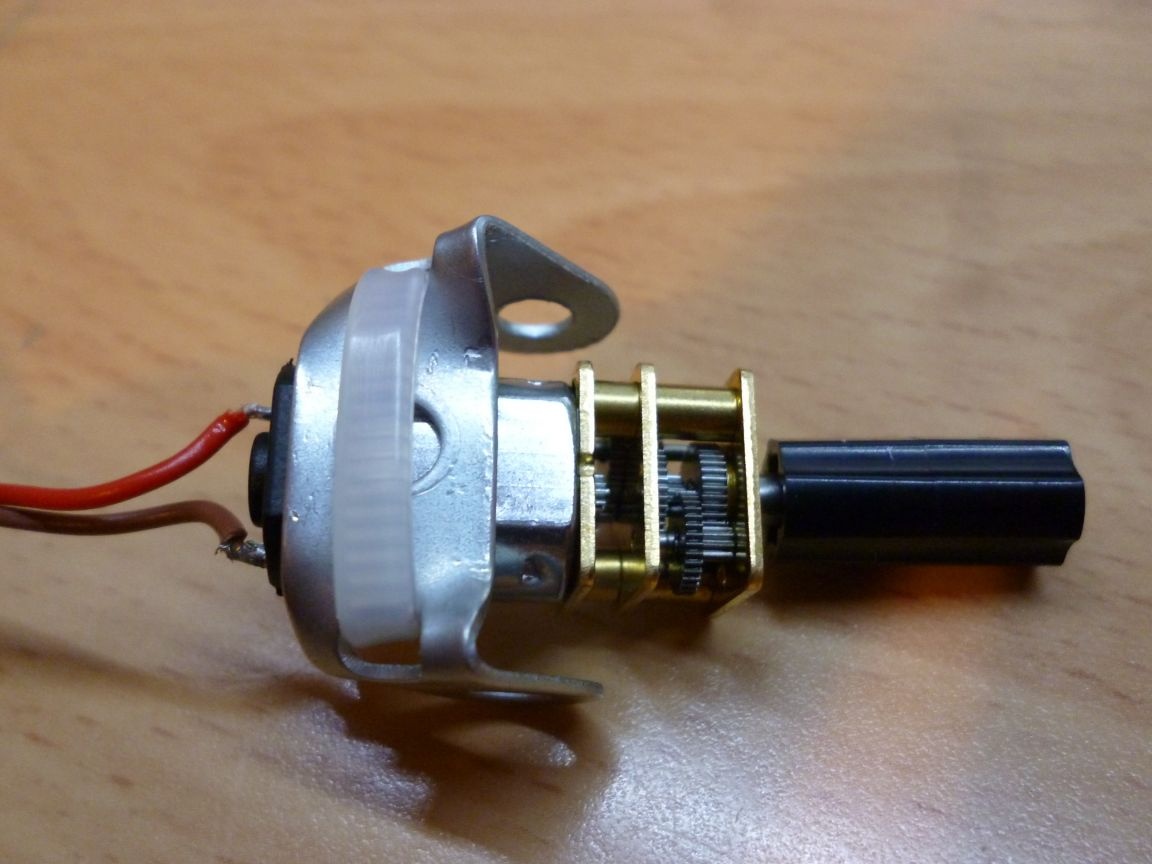
- Motoréducteur 200 tr / min, avec un diamètre d'arbre de 3 mm
- 2 LED
- 2 résistances 150 ohms
- Condensateur 10v 1000uF
- 2 peignes à une rangée PLS-40
- 2 connecteurs PBS-20
- Inductance 68mkGn
- 6 batteries NI-Mn 1.2v 1000mA
- Connecteur papa-maman deux broches à câbler
- Homutik
- Fils de différentes couleurs
- souder
- Colophane
- fer à souder
- Boulons 3x40 et écrous et rondelles pour eux
- Boulons 3x20
Étape 1 assembler le boîtier.
Il est nécessaire d'assembler notre machine selon les instructions Lego 42022 la deuxième option avec un certain raffinement. Nous effectuons toutes les actions de la page 3 à 6. Nous n'avons pas besoin d'un mécanisme d'engrenage. Le moteur Lego n'a pas non plus besoin d'être assemblé. Cependant, vous aurez besoin des supports de moteur collectés aux pages 14-19, à l'exception des engrenages et des arbres. Ensuite, nous collectons tout des pages 20 à 74, à l'exception du levier de la page 25.
Étape 2 mécaniser le corps.
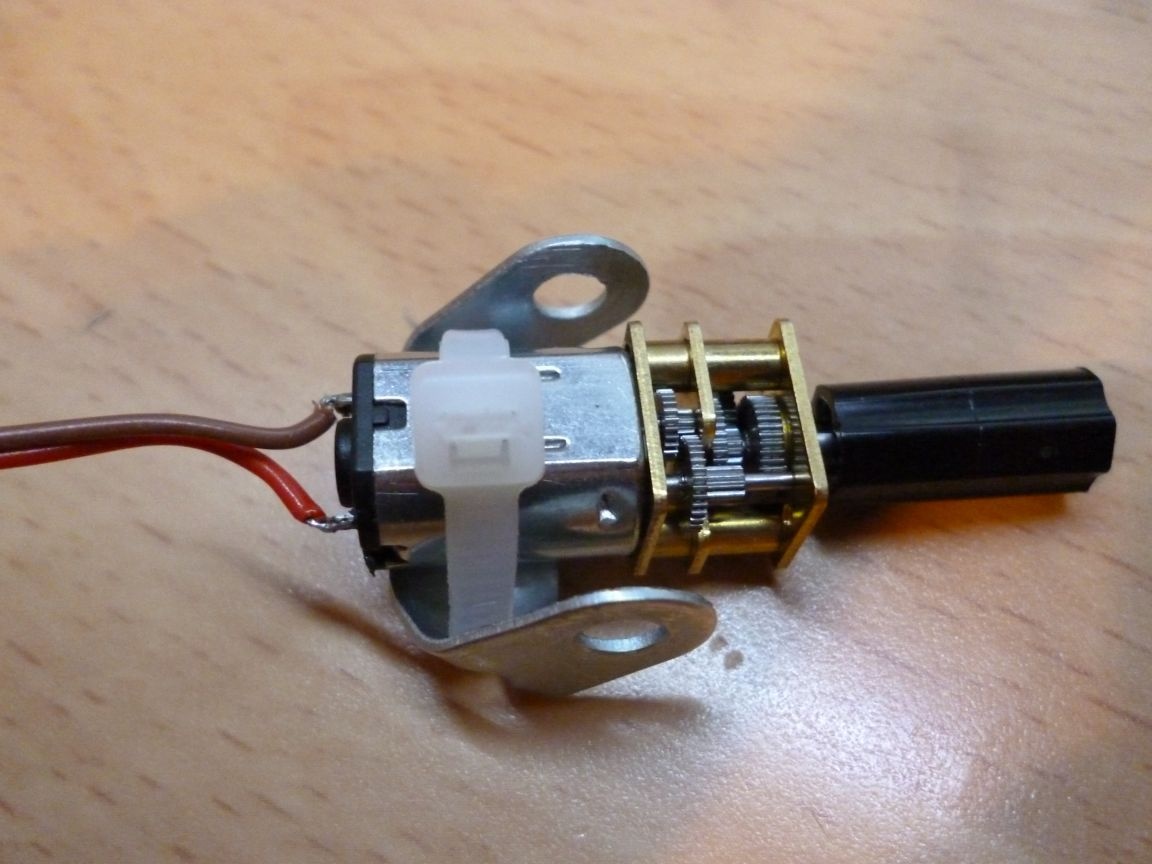
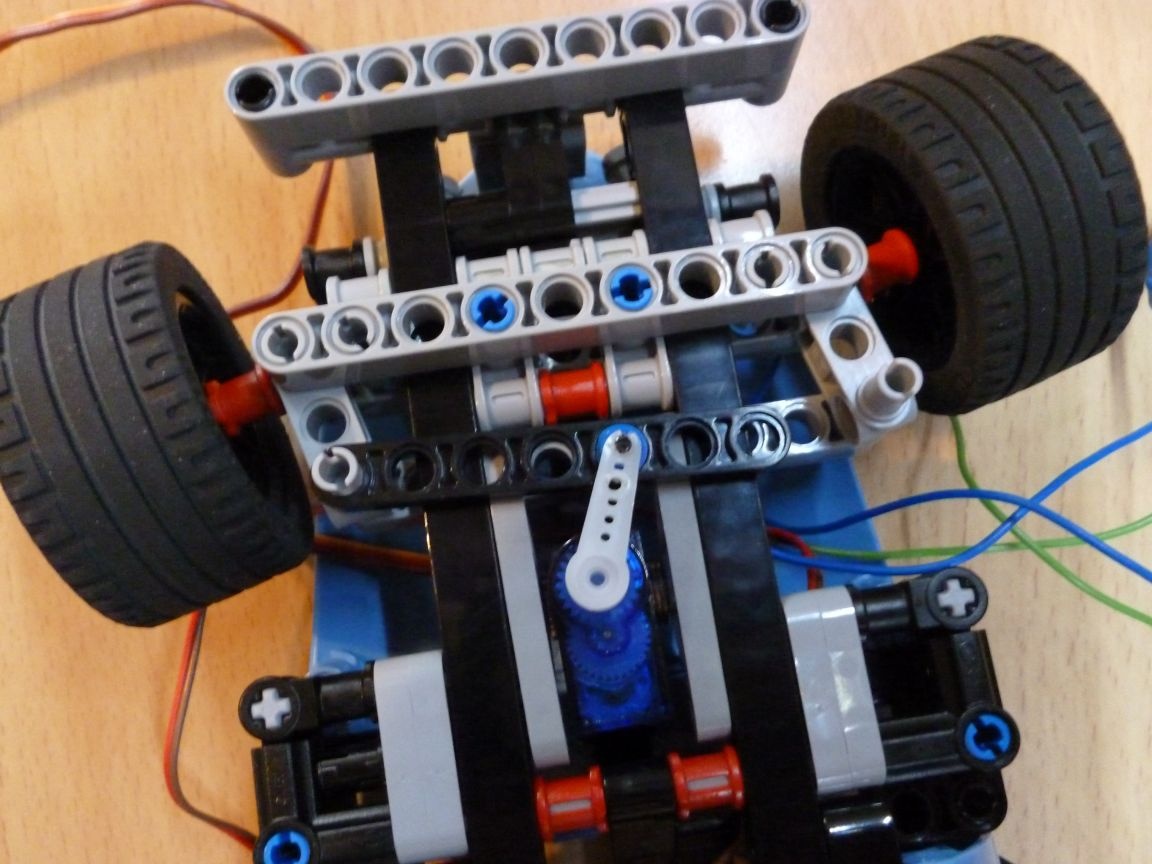
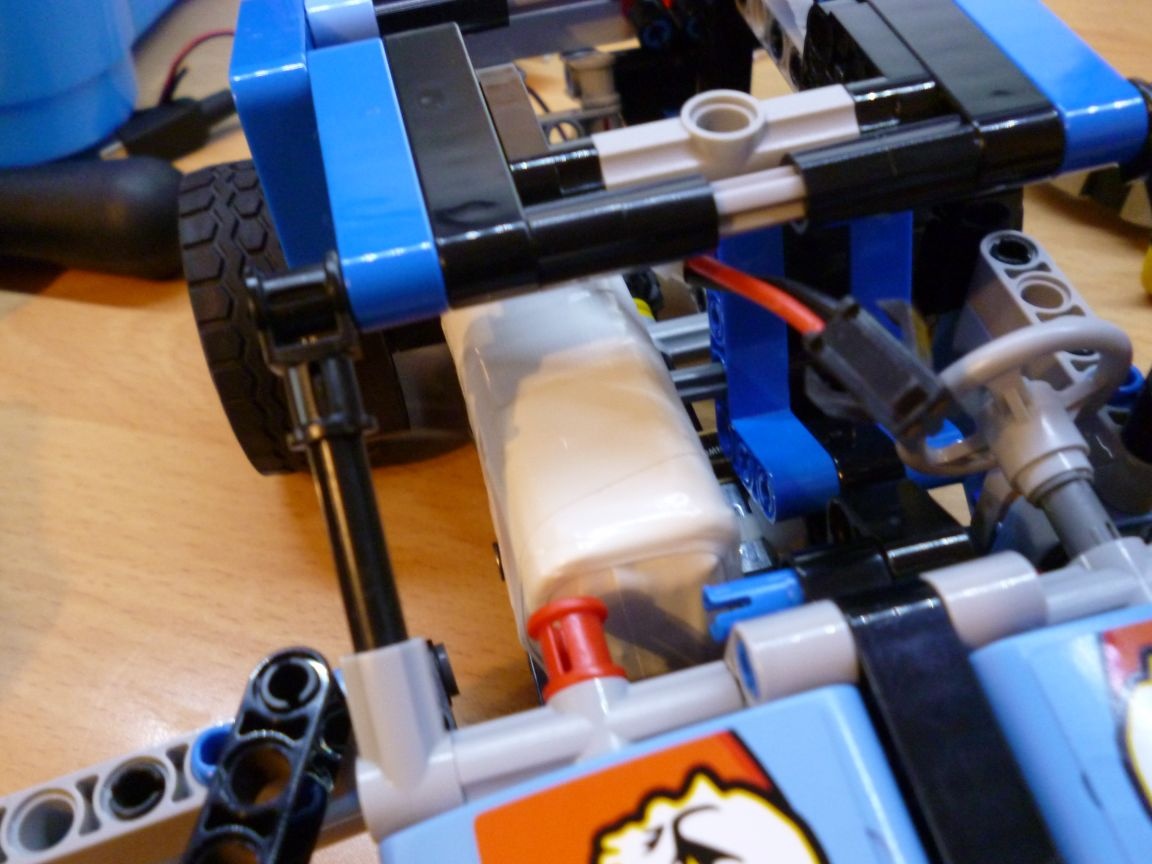
Mettez en marche notre le modèle il y aura un motoréducteur avec une vitesse de 200 tr / min. Peut être utilisé avec un rapport d'engrenage différent. Mais, à mon avis, c'est la meilleure option. À 100 tr / min - trop lentement, 300 tr / min - il n'y a pas assez de puissance et le moteur est très chaud. Sur l'arbre du motoréducteur, il est nécessaire de mettre en place le manchon de raccordement «Legovskaya» et de le bloquer contre les virages en coupant une allumette. Pour fixer notre moteur sur le modèle, il est nécessaire de plier la pièce du constructeur métallique avec la lettre "P" et de fixer le motoréducteur sur la plaque avec une pince. Le résultat doit être le suivant:
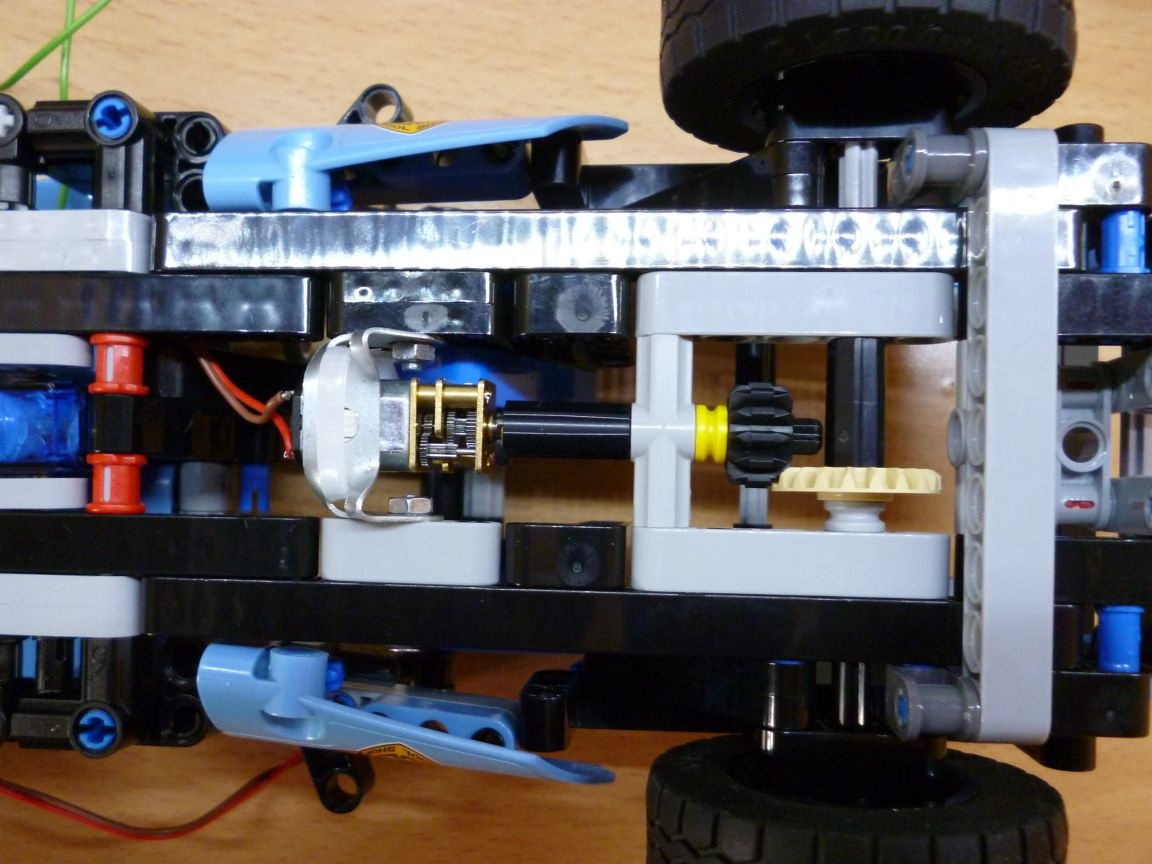
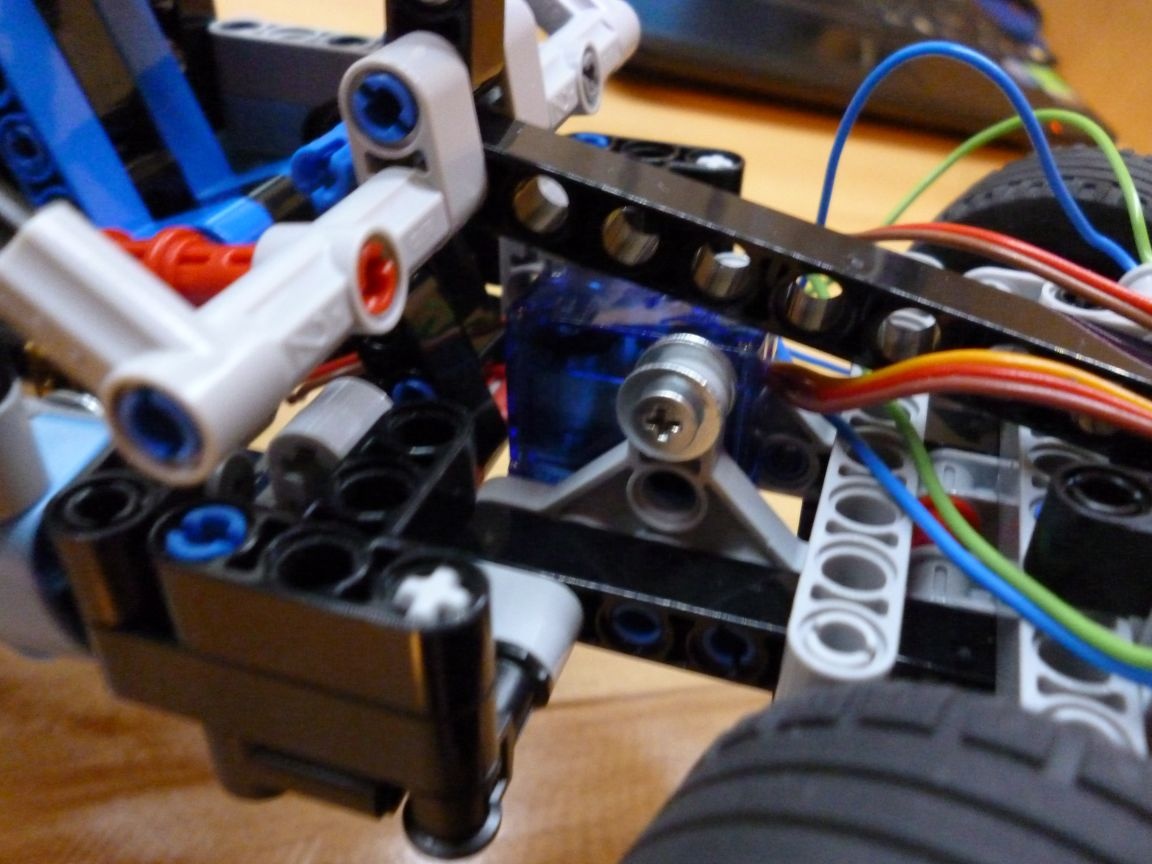
À l'aide de boulons 3x20, nous fixons notre moteur au modèle. Ne serrez pas trop! Sinon, vous pourriez endommager les pièces du constructeur Lego. Sur le modèle, cela ressemble à ceci:
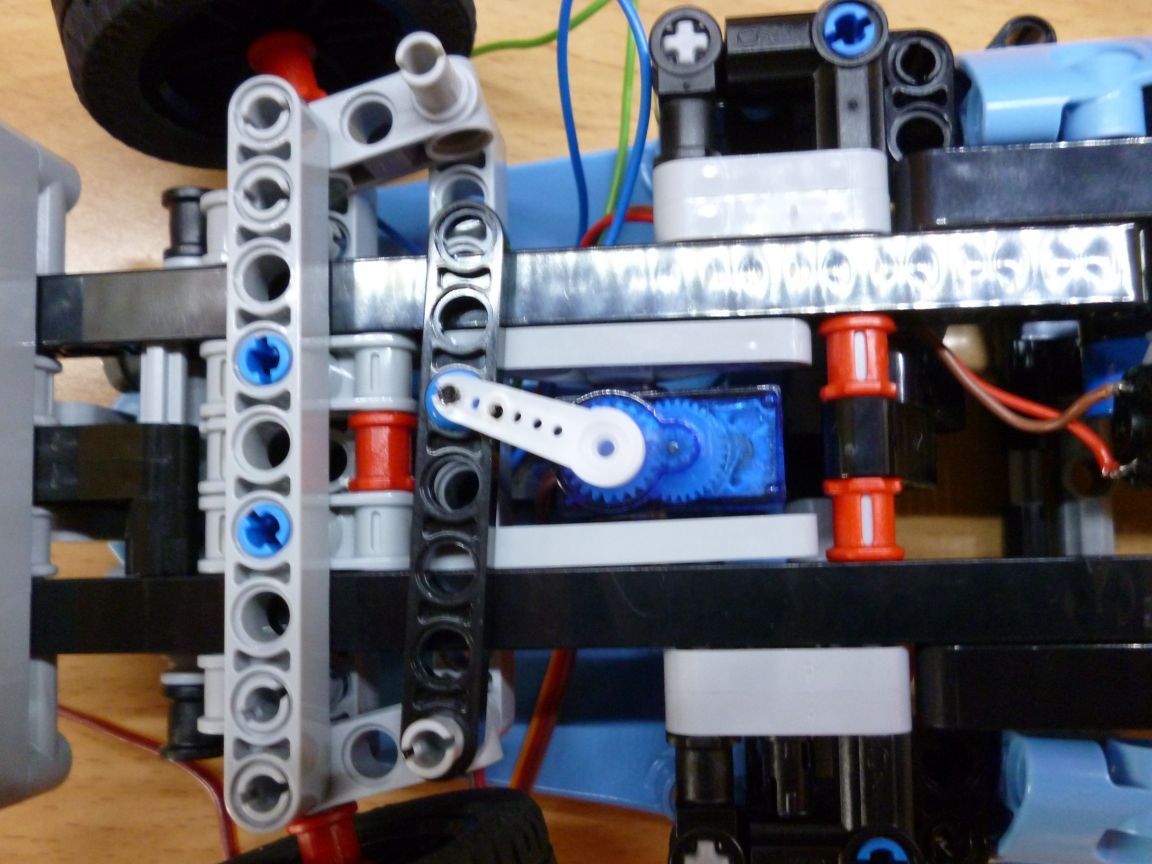
Pour faire le tour, prenez un servo SG-90 légèrement modifié. Le boîtier doit être soigneusement percé afin de ne pas toucher les pièces internes, le trou traversant d'un diamètre de 3,2 mm ou simplement coupé avec un couteau de bureau.

Nous insérons un boulon dans le trou fait, et sur les bords, nous mettons des plaques triangulaires et fixons avec des écrous. Nous plaçons le levier sur l'arbre servo et fixons la pièce au levier Lego. Sur une machine à écrire, cela ressemble à ceci:
L'étape 3 est un électricien.
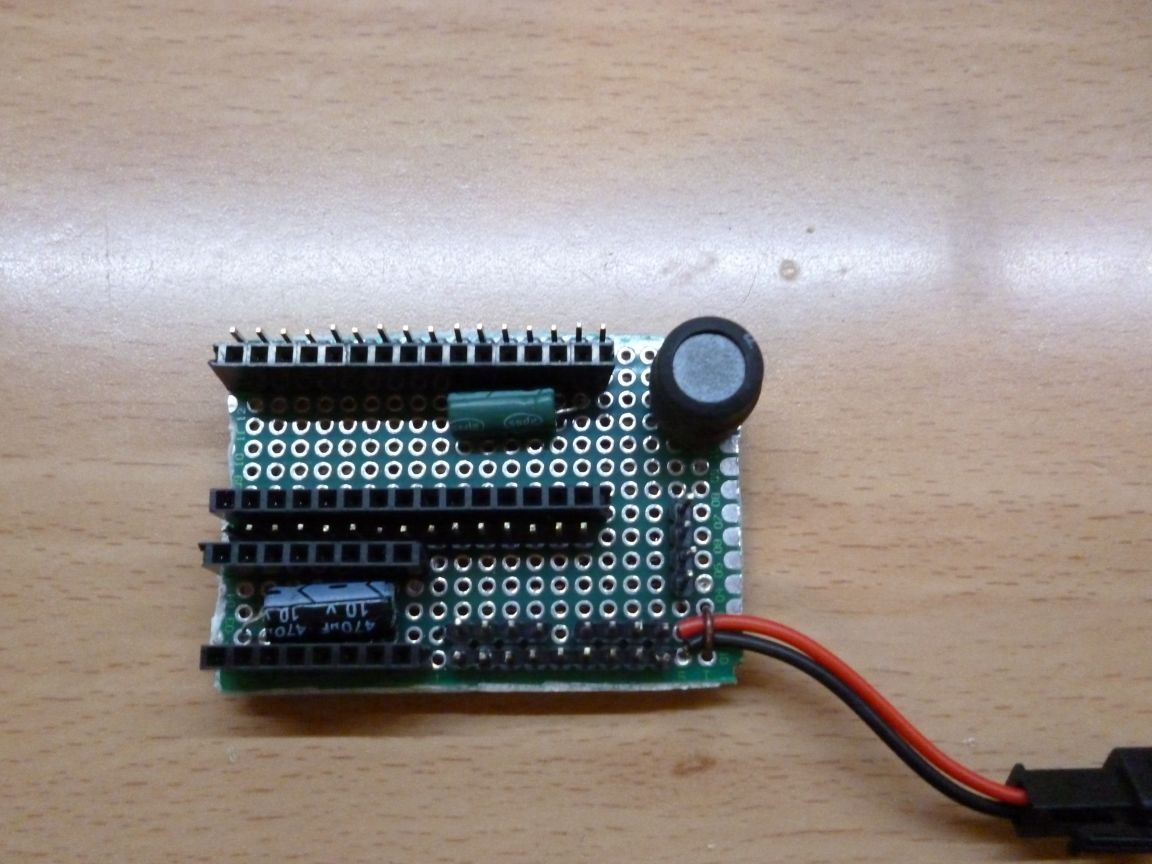
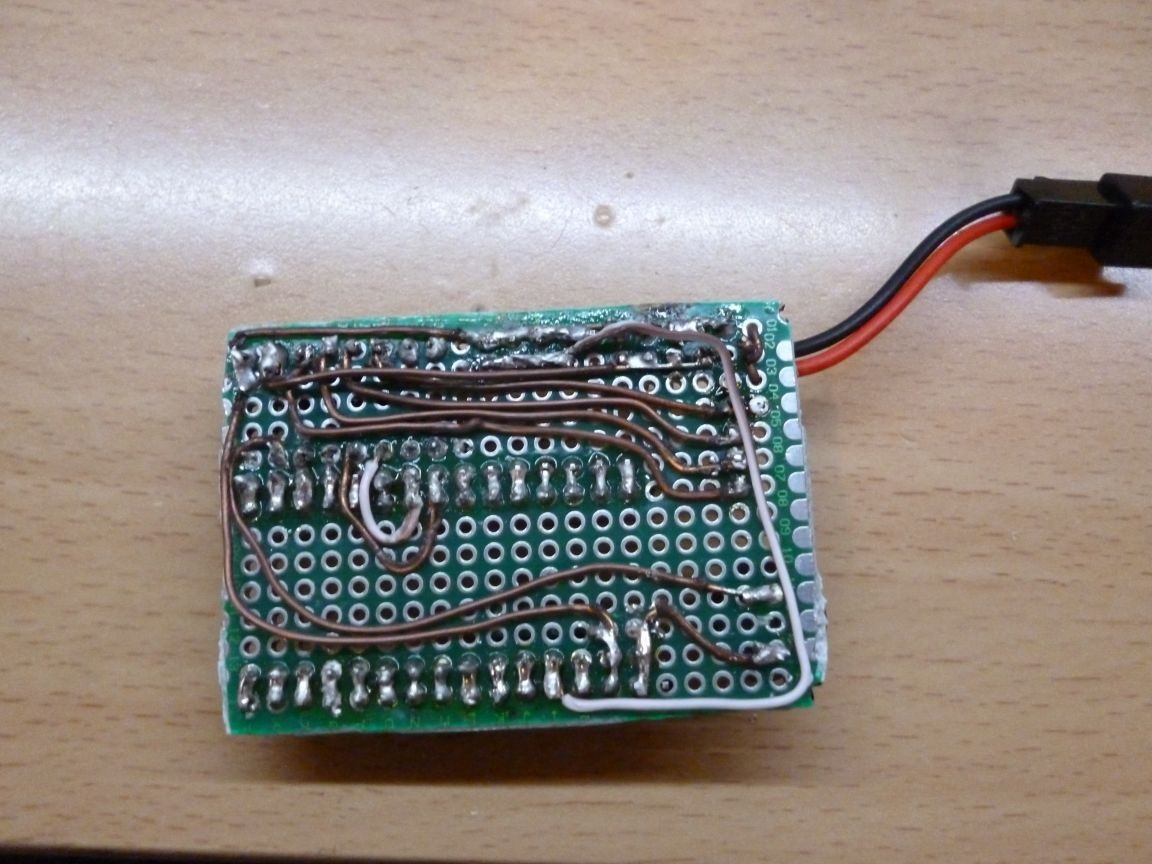
Fer à souder à la main et c'est parti. Tous les appareils électriques peuvent être assemblés simplement en connectant les fils de montage. Mais cela n'est pas pratique, car il nécessite beaucoup d'espace. En outre, il existe une forte probabilité de contacts de mauvaise qualité. Par conséquent, il est préférable de tout souder sur la carte de circuit imprimé selon le schéma suivant:
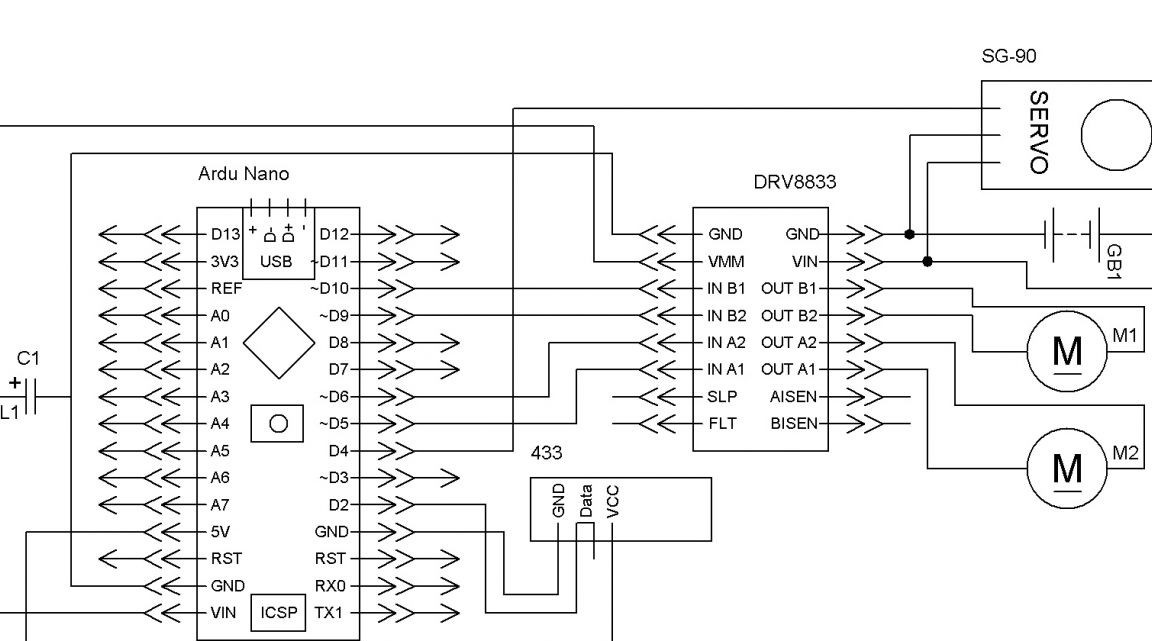
J'apporte un peu de clarté: vous pouvez prendre n'importe quel condensateur basse puissance, vous pouvez également trouver une inductance de toute nature, cela est nécessaire pour stabiliser la tension du microcontrôleur. L'antenne doit être soudée au récepteur. J'ai obtenu ce qui suit:
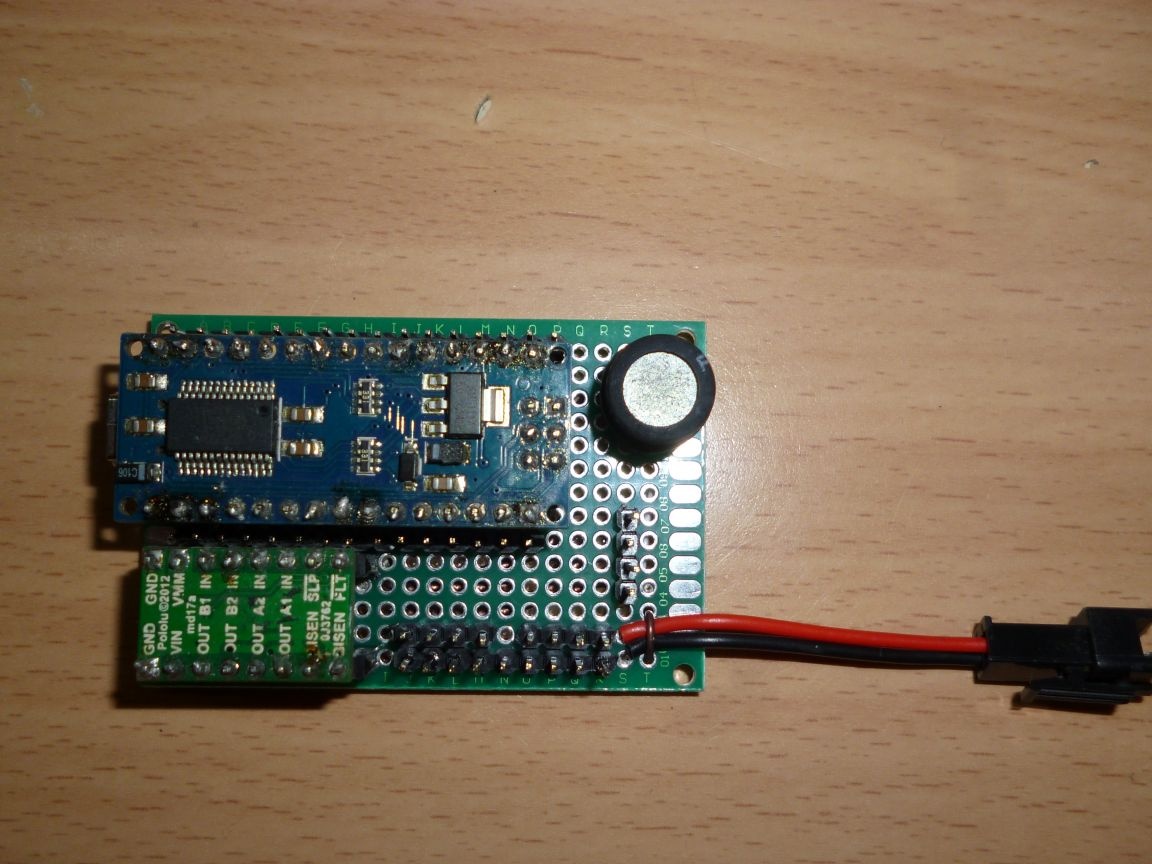
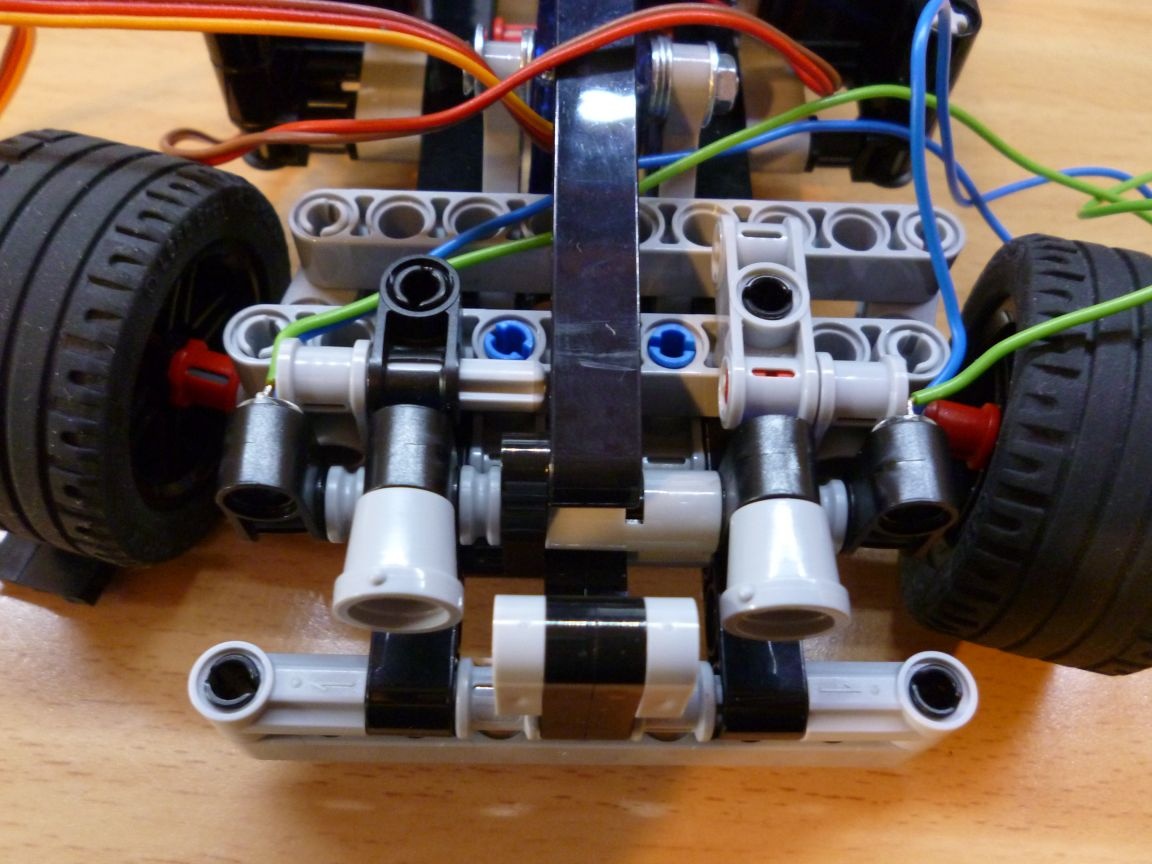
Nous avons mis Arduino Nano et DRV 8833 à leur place:
Pour l'alimentation, nous utiliserons 6 batteries Ni-Mn 1.2v 1000mA, soudées en série et enroulées avec du ruban électrique. Collez-les sur un siège passager à ruban adhésif double face.

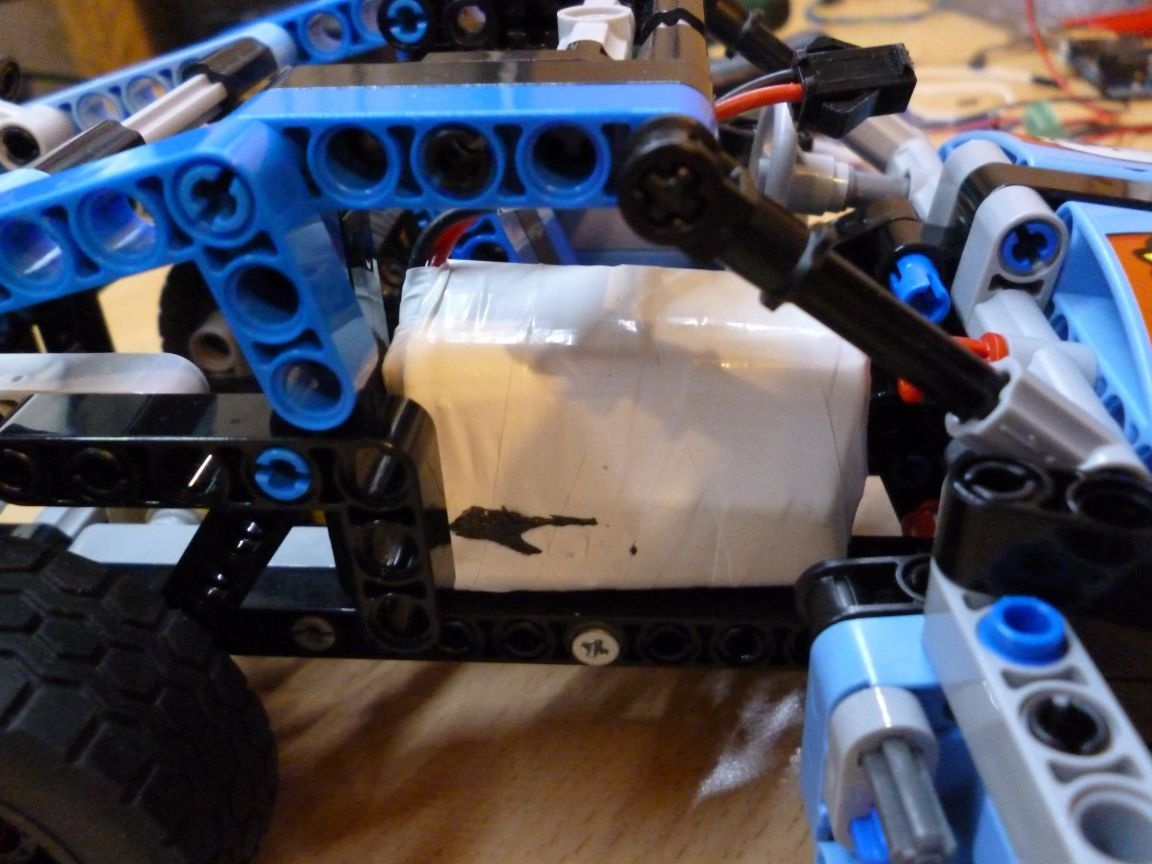
Nous connectons tout selon le schéma et installons à l'arrière de la machine. Vous pouvez également ajouter quelques LED. Mettez-les dans les phares et connectez-les à la broche 14 (A2).
Étape 4 du firmware.
Pour écrire le firmware, j'ai utilisé l'IDE Arduino. La version actuelle au moment de la rédaction est 1.8.1. Il est pratique de mettre en œuvre le protocole de communication à l'aide du module 433 MHz à l'aide de la bibliothèque rc-switch-2.52. Vous devez le télécharger et l'ajouter au dossier «bibliothèques» de l'IDE Arduino.
Nous connectons l'Arduino et le flashons avec le firmware suivant:
Pour tester les performances de notre modèle, nous avons besoin d'une seconde carte Arduino. Il est nécessaire de connecter un émetteur radio 433 MHz à la deuxième carte. L'émetteur est connecté comme suit:
VCC (émetteur) à 5+ (Arduino),
GND à GND,
DONNÉES à D10.
Écrivez-y l'esquisse SendDemo modifiée. C'est dans les exemples de la bibliothèque que nous avons installée et sert à envoyer des commandes. Avant de flasher l'esquisse, vous devez la modifier légèrement, à savoir changer les commandes transmises. Selon ce que vous devez vérifier, écrivez les commandes suivantes sur la ligne d'envoi:
"1" - mouvement vers l'avant (écrire une commande sans guillemets!)
"2" - mouvement vers l'arrière
«15» - point final
"3" - tournez le volant vers la gauche
"4" - tournez le volant vers la droite
"5" - placez le volant au milieu
"10" - allumez les phares
"11" - éteignez les phares
Faire une télécommande avec un émetteur radio 433 MHz est un sujet pour un article séparé. Je vais certainement écrire les instructions pour la fabrication d'une telle télécommande.
Je veux dire que cette option convient à presque tous les modèles de voitures Lego. Il suffit de connecter toutes les mécaniques et de trouver une place pour la planche. Et si vous incluez la fantaisie, vous pouvez mécaniser n'importe quel modèle.