


Tout d'abord, comprenons la différence entre l'octocoptère et le quadricoptère. En plus du nom, c'est aussi le nombre de moteurs sur les rails. C'est-à-dire quadricoptère - quatre moteurs, octocoptère - huit. Cela est également vrai pour l'hexacoptère - six, le tricoptère - trois, etc. Si les guides, par exemple, sont quatre (X) et huit moteurs, il s'agit toujours d'un octocoptère, mais il est désigné par X8. C'est-à-dire sur quatre rails, huit moteurs.
Fondamentalement, les numéros avec un préfixe pour les hélicoptères sont des avions qui sont contrôlés par le signal radio de l'opérateur depuis le sol. Un étudiant indien a décidé d'aller plus loin et de fabriquer un octocoptère capable d'élever une personne dans les airs. Ce n'est pas un projet bon marché. Le financement a été repris par l'établissement d'enseignement.
Outils et matériaux:
- Moteurs Turnigy CA170 Motors - 8 pièces;
- Contrôleur Turnigy Fatboy 300A - 4 pièces;
- Contrôleur Turnigy 200A HV - 4 pièces;
- Émetteur Hitech XG11 Tx / Rx;
- Contrôleur de vol DJI A3 Pro;
-Contrôleur de vol DJI Naza M V2;
- Batterie Zippy 22.2V 5Ah 40C LiPo - 16 pièces;
- Chargeur 6s LiPo Charger;
Connecteurs -XT150 - 50 pièces;
-Fil de silicone 8AWG - 10 mètres;
Servos;
-Ball pour jouer au squash (Squash Balls) - 4 pièces;
- Feuille MDF 25cm x 50cm x 2mm;
-Drill;
- Meuleuse d'angle;
- Tournevis;
- Clés;
- Pinces;
-Laser cutter ou scie à ruban;
-Assortiment d'écrous 4 mm, 6 mm et 8 mm, boulons et rondelles;
-Brûleur;
-LED LED;
-Accessoires de soudure;
- Fil d'acier de 2 et 3 mm;
-Vis Telrep 100mm-200mm - 40 pièces;
- 40 crochets et boulons à œil;
-Tachymètre Turnigy RPM;
-Analyseur de puissance (Wattmètre / ampèremètre Turnigy);
-Contrôleur de batterie;
- Tubes profilés en aluminium;
-Plaque en aluminium;
- Ruban adhésif double face;
-Machine à souder;
-Roulette;
-Ordinateur avec Fusion 360;
- Batterie 11,1 V 2200 mAh LiPo 30C;
-Tissu dense 1,2 mx 1,2 m;
- Fil et aiguille solides;
-Sécurité de la ceinture;
Première étape: conception
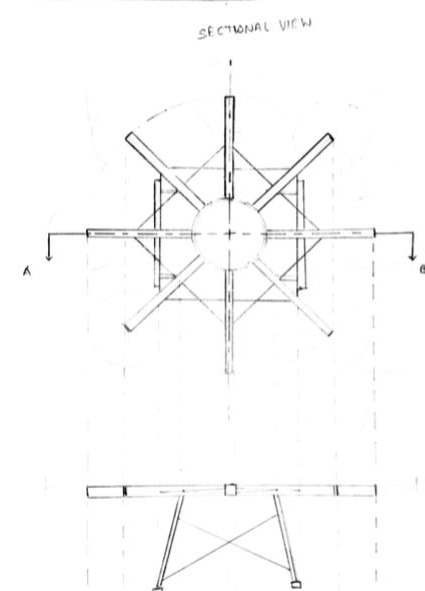
Lors du développement d'un octocoptère habité, le capitaine a envisagé diverses options de configuration, X8 et H, et T, mais est parvenu à la conclusion que le plus optimal, pour diverses raisons, serait la conception de l'octocoptère, selon le schéma traditionnel.
Il a ensuite fallu déterminer la taille de l'octocoptère. Les calculs ont été effectués à l'aide d'exemples de modèles CAO sur le Fusion 360. Les vis existantes ont été prises en compte dans les calculs. L'optimum s'est avéré être un diamètre de trois mètres, une hauteur d'un mètre. Panier intérieur, pour une personne 55x55 cm.

Deuxième étape: panier
Le cadre a été soudé à partir d'un profil carré en aluminium avec une étagère de 50 mm et une épaisseur de paroi de 2 mm.
Le profil a été coupé et soudé. Les coutures sont nettoyées.



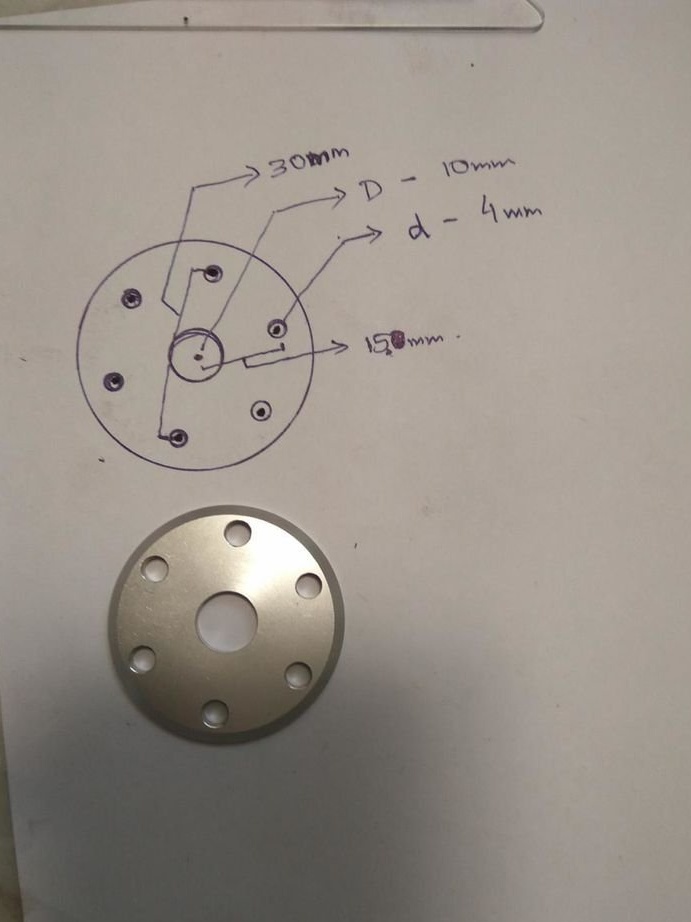
Troisième étape: plaques de montage
Pour les supports, le maître a utilisé des plaques d'aluminium de 1,5 mm. Il y a huit supports au total, quatre dans les coins et quatre au milieu du cadre. La longueur de l'épaule du bras et de la partie de support est de 15 cm chacun. Les supports ont été conçus dans le Fusion 360. Les plaques ont été coupées avec une fraise. Des trous de montage y sont percés. Ensuite, les supports ont été soudés au cadre.

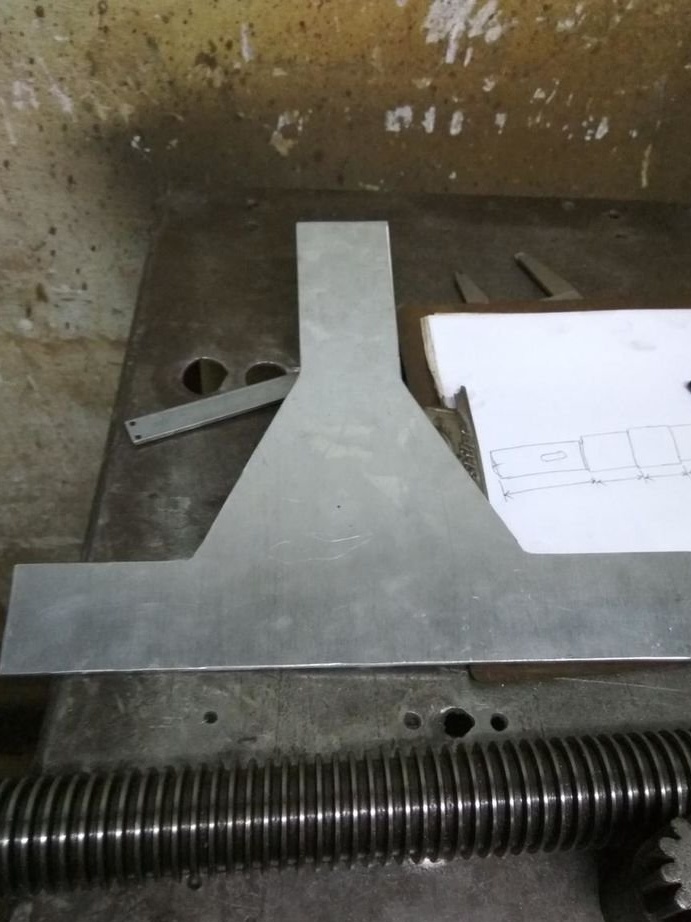





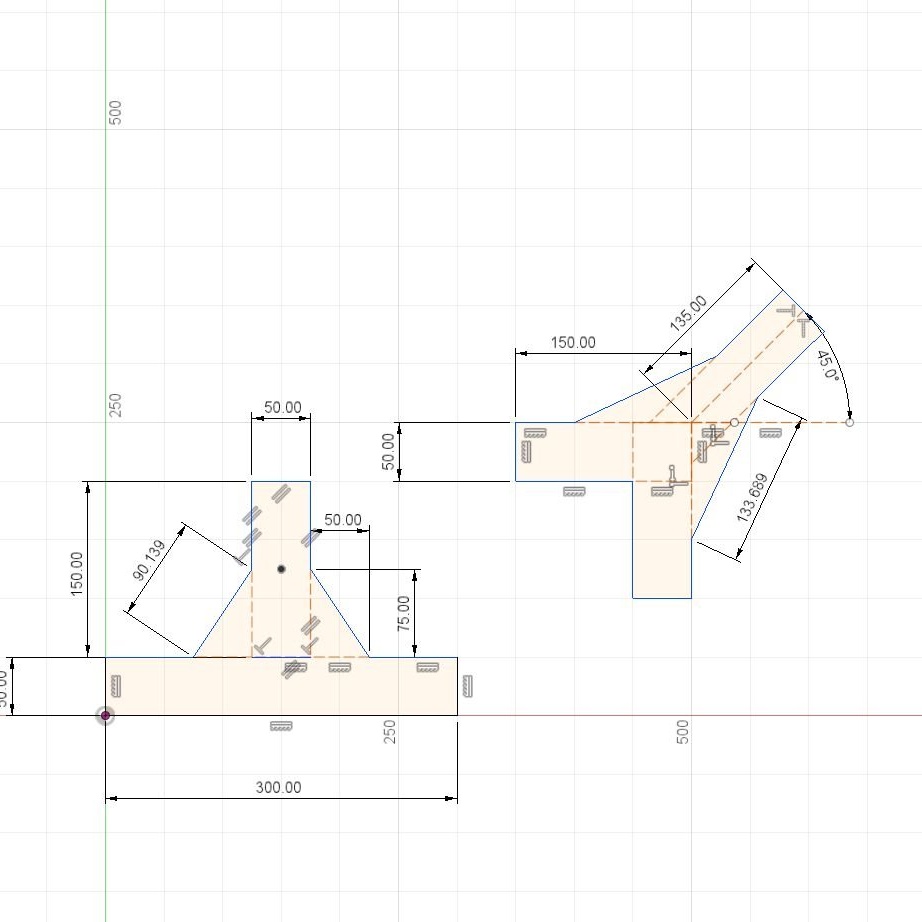
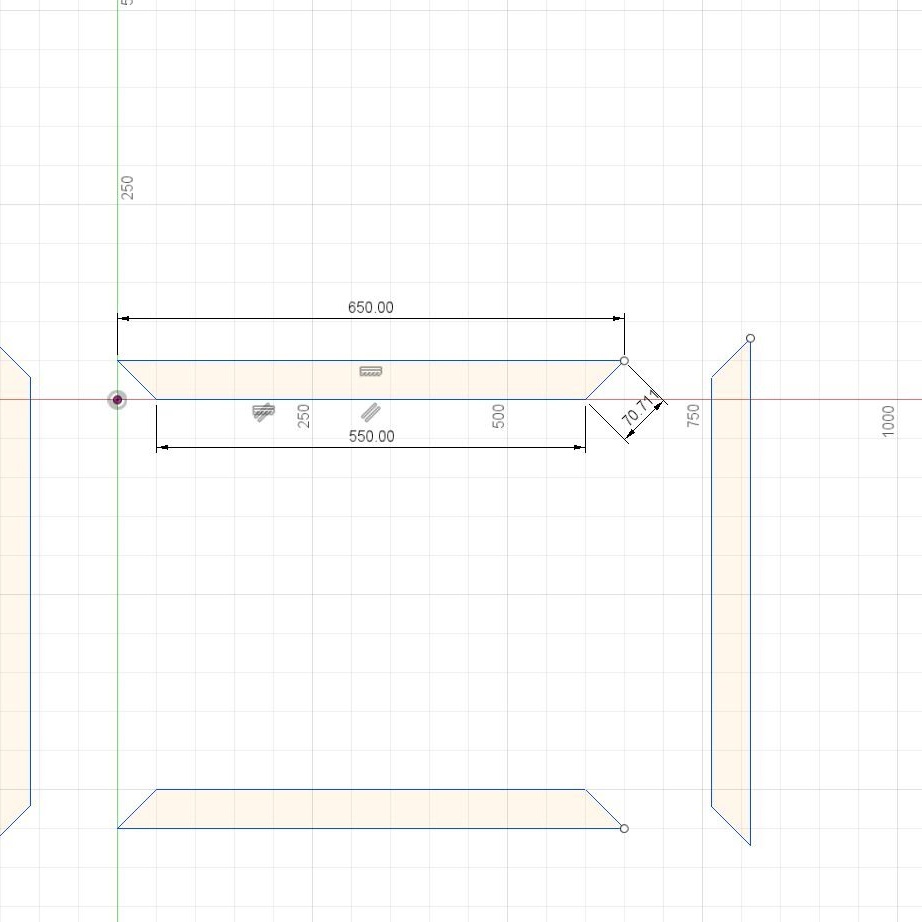
Quatrième étape: profil de l'opérateur
Ces profils sont fixés aux supports et les moteurs sont installés à leurs extrémités. Les profils sont carrés, 50 X 50 cm, et ont des longueurs différentes. Des profils de 112,5 cm de long sont attachés dans les coins, 125 cm de profil sur les côtés, une découpe est faite au niveau des profils angulaires à un angle de 45 degrés. Il faut que sa face d'extrémité soit adjacente au plan de l'angle.
Pour fixer les profils aux supports, le maître perce des trous pour les boulons.




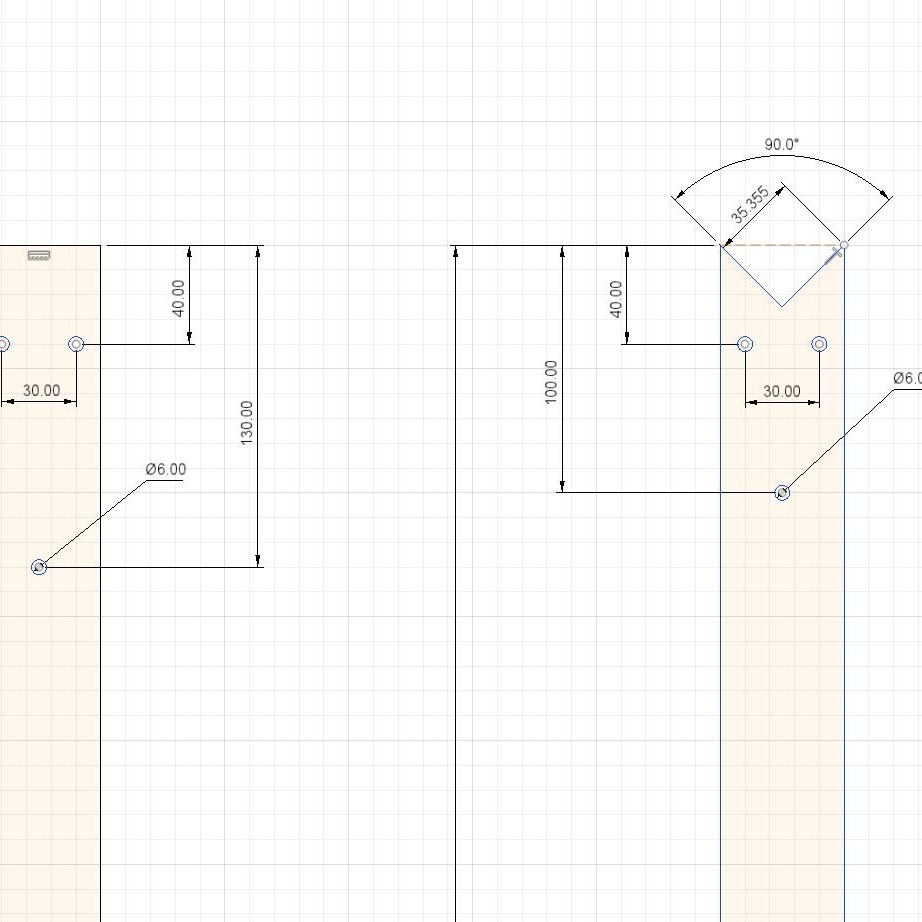
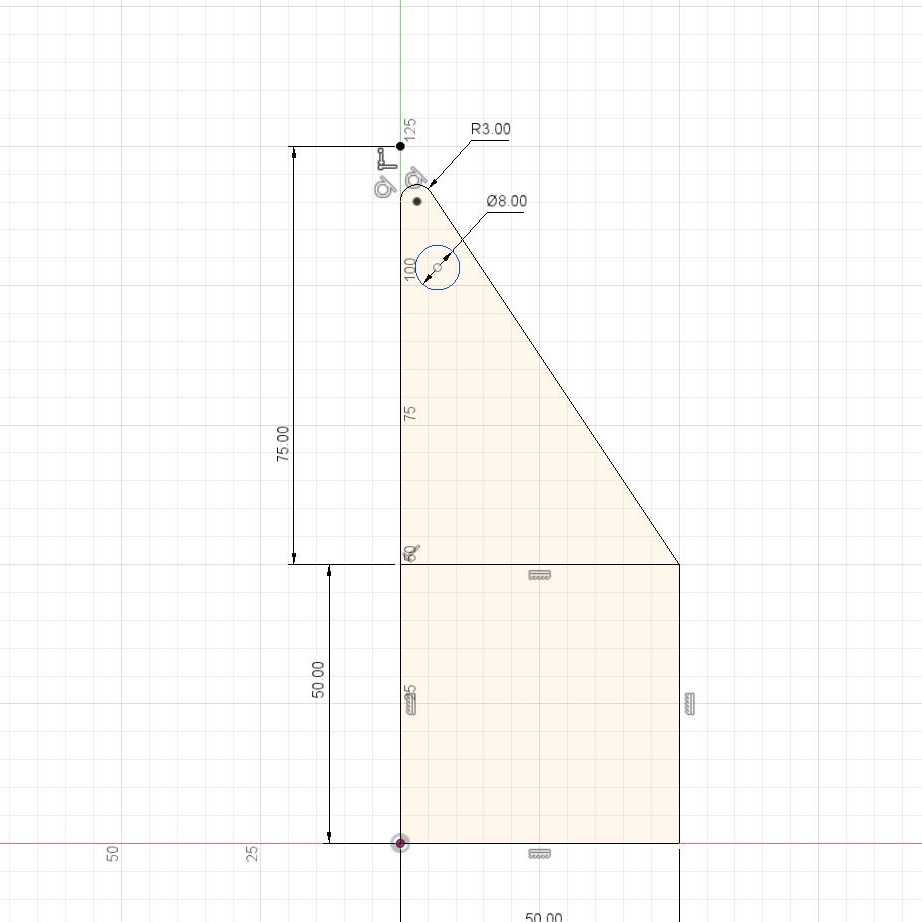
Cinquième étape: support moteur
Les moteurs sont vissés sur une plaque carrée en aluminium. Du bas de la plaque, parallèlement l'un à l'autre, deux coins sont vissés. La distance entre eux est égale à la largeur du profil. De plus, la plaque avec le moteur est montée sur le profil, les trous de montage sont percés et tout est tordu avec des boulons.





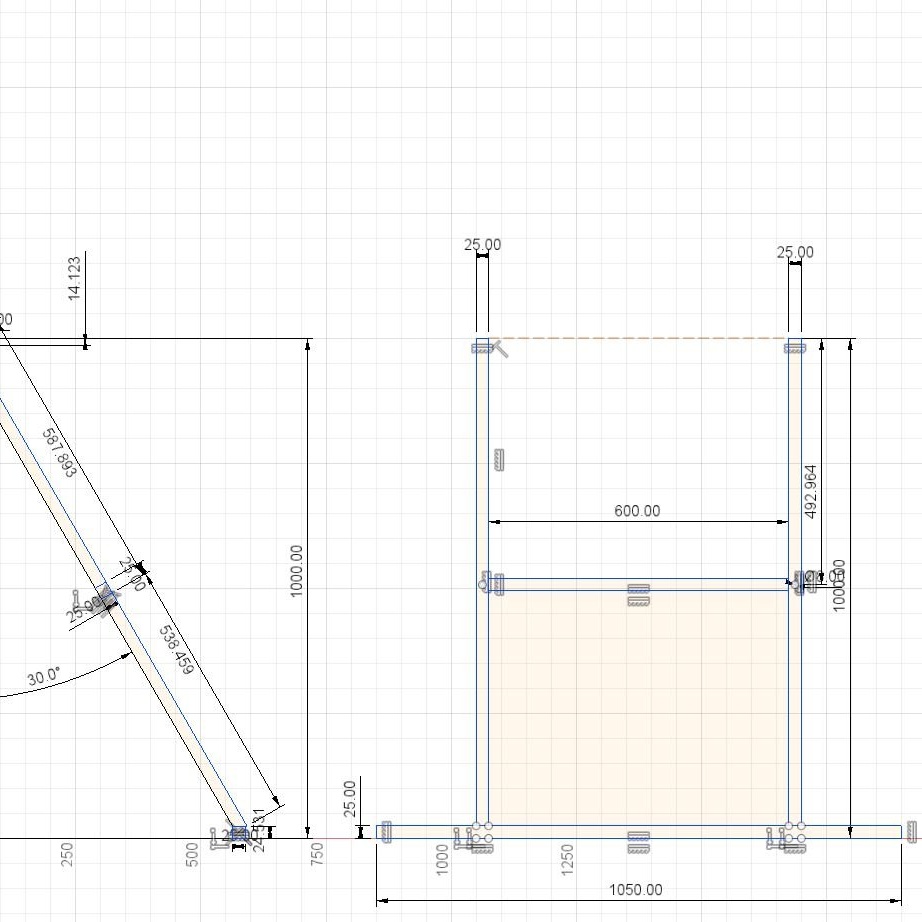
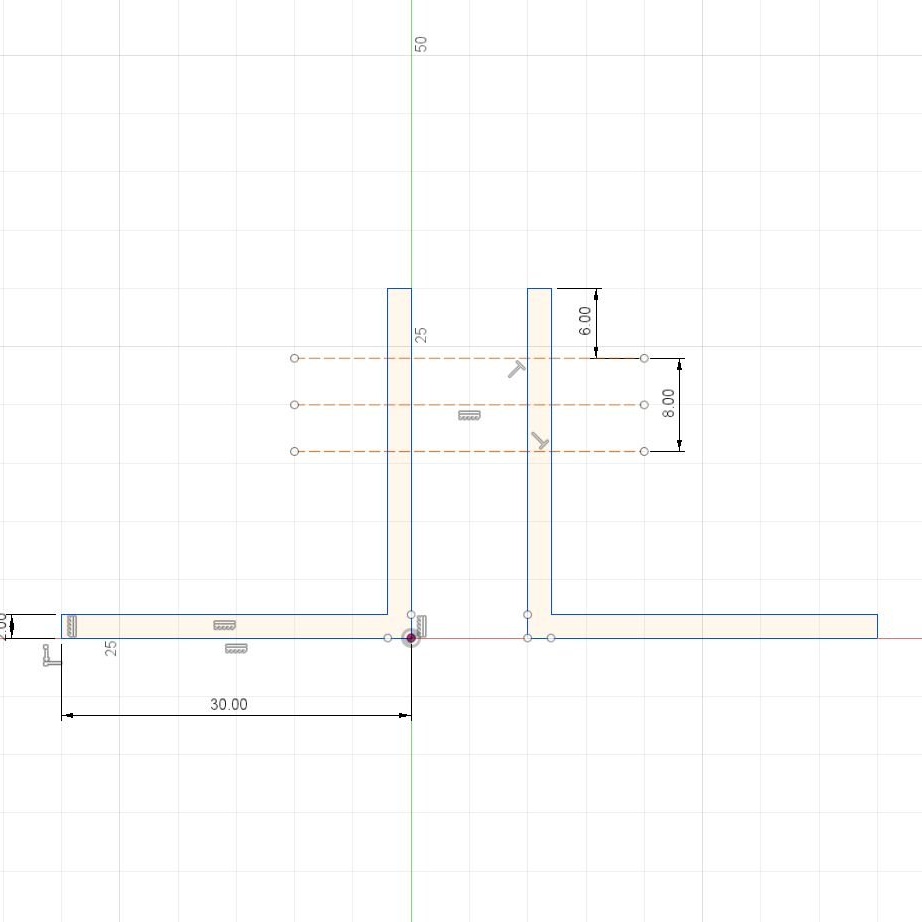
Étape six: châssis
Le châssis était constitué de profilés en aluminium de 25 x 25 mm et d'une épaisseur de 3 mm. Toutes les pièces ont été soudées, et leurs tailles sont visibles sur la photo. L'idée était de monter le châssis hors du panier à un angle de 30 degrés. Pour éviter d'endommager le châssis, des câbles de support sont tirés entre eux.


Étape 7: prise en charge des profils de support
Après l'installation des moteurs, les profils de support ont commencé à se plier. Ensuite, le capitaine a essayé de démarrer le moteur et a découvert que les profils "marchaient". Il était nécessaire de renforcer la conception.
L'ajout de plaques ajouterait trop de poids à la structure. Ensuite, le capitaine a décidé de faire une conception en forme de V du panier vers le bas. Des cordes sont attachées à sa partie inférieure. Les autres extrémités des câbles sont fixées aux supports au milieu des profils de support. Les câbles sont tirés avec un palan. Ainsi, la structure devient rigide.















Étape huit: se connecter
Tout d'abord, le maître a soudé les connecteurs aux extrémités des fils.


Commence alors l'installation. Chaque moteur devait être vérifié pour le sens de rotation. Si nécessaire, il est facile de changer le sens de rotation du moteur, et, en conséquence, la vis, en échangeant deux des trois fils allant de l'ESC au moteur. Une fois tous les moteurs correctement connectés, l'assistant a effectué l'installation conformément au schéma de connexion du fabricant.
Les contrôleurs de vol IMU DJI A3 sont très sensibles aux interférences des métaux, et le capitaine n'a pas pu configurer le système en raison d'interférences. En conséquence, le maître a remplacé A3 par le Naza M V2, qui avait un schéma de connexion similaire. Naza M V2 a fonctionné de manière très fiable.
L'assistant connecte ensuite les batteries. Sur chaque profil porteur, deux batteries 22,2 V sont connectées en série.



Étape neuf: siège pilote
Le siège a été cousu en tissu durable. En outre, une ceinture de sécurité est attachée au pilote, qui est attachée au cadre, et un casque.






Étape dix: Premier vol
Avant le vol du pilote sur l’octocoptère, plusieurs tests ont été effectués avec un sac de sable, puis avec un modèle de personne. Pendant le vol, diverses situations ont été simulées, de la perte de contrôle à une rafale de vent.
Après tous les tests, le pilote a finalement volé dans les airs.






Avant de voler, vous devez effectuer les actions suivantes.
Vérifiez l'étanchéité des boulons, des câbles et du support moteur.
Vérifiez le câblage.
Vérifiez que les vis tournent facilement.
Assurez-vous que tous les ESC sont désactivés.
Assurez-vous que toutes les batteries sont solidement fixées et chargées.
Connectez l'alimentation au contrôleur de vol pour l'initialisation et l'étalonnage.
Une fois connecté au GPS, il passera en mode entièrement automatique (Alt. + Att. Hold).
Asseyez-vous sur le siège du pilote et attachez votre ceinture.
Connectez toutes les batteries à l'ESC.
Connectez les deux batteries en série (ESC-RB-RB-ESC) à l'aide d'une résistance pour éliminer l'étincelle.
Allumez les moteurs en tournant l'interrupteur en position de marche.
Utilisez le contrôleur pour contrôler l'octocoptère.