
La particularité du robot BIBOT-1 est qu'il peut effectuer deux tâches. Il peut se déplacer derrière une source de lumière ou le long d'une ligne noire qui peut être dessinée sur du papier. Le robot très flexible dans les paramètres, c'est-à-dire qu'il sera plus tard possible de l'ajuster à toutes les conditions souhaitées, c'est-à-dire de le rendre plus sensible à la lumière ou moins. Il est également possible d'ajuster la vitesse de rotation des moteurs, cela permettra au robot de mieux fonctionner, notamment lors des déplacements le long de la ligne.

L'appareil et le principe du robot:
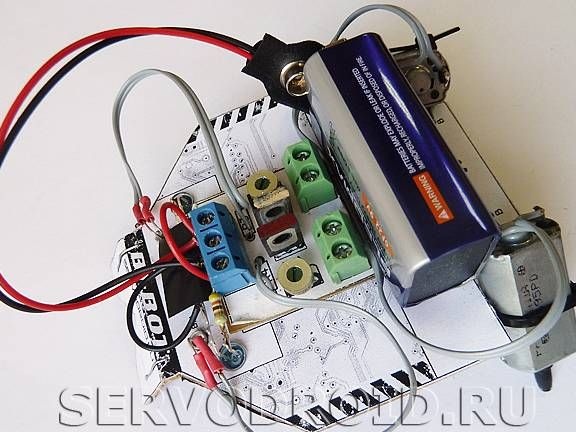
La base du robot est en carton, le modèle est imprimé sur l'imprimante, puis se bloque. Quant au module de composants radio, un textolite a été pris comme base, le module est fixé à la base du robot. Pour rendre le corps plus rigide, des nervures spéciales sont utilisées dans la conception.
Les moteurs sont installés comme dans la plupart de ces fait maisonc'est-à-dire sous un angle. Pour cette raison, il n'est pas nécessaire de mettre les roues et la boîte de vitesses. Pour empêcher les arbres de glisser sur la surface, des protecteurs sont placés dessus.
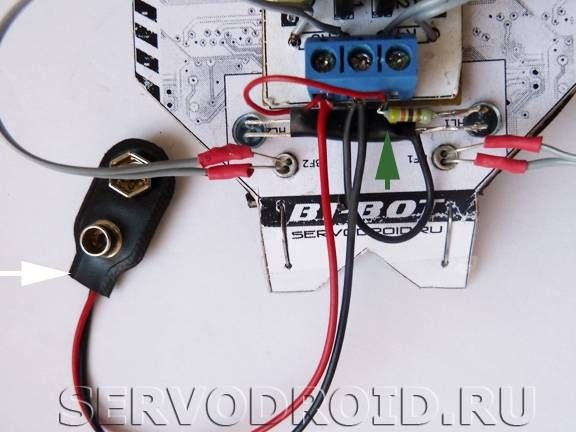
Une pile 9V de type 6F22 est utilisée comme source d'alimentation. La batterie est fixée avec du ruban adhésif et est toujours disponible pour un remplacement facile.
Quant à l'interrupteur, alors auto décidé de ne pas l'installer. Le robot s'allume et s'éteint en manipulant le clip qui se fixe à la batterie.
Et enfin, le réglage du robot. Pour régler la sensibilité du robot, le système dispose de deux résistances de réglage. Lorsqu'ils tournent, vous pouvez régler la sensibilité du robot à la lumière, et vous pouvez également régler la vitesse de rotation des moteurs. Plus le robot est sensible à la lumière, plus il se déplacera rapidement et vice versa.
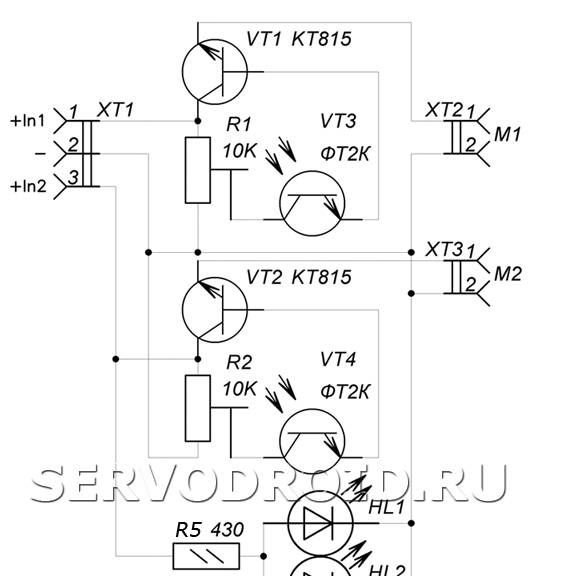
Quant au principe de fonctionnement, tout est exposé dans le schéma.
Matériaux et outils:
- Batterie 9V et clip pour la connexion;
- deux connecteurs pour connecter les moteurs (borniers à deux sections);
- moteurs;
- chape en nylon;
- protecteur (rouleau en caoutchouc);
- deux phototransistors;
- deux LED infrarouges;
- un support d'une agrafeuse;
- bornier à trois sections pour le raccordement à l'alimentation;
- résistance d'accord.

Processus de fabrication:
Première étape. Conception de PCB
Les frais sont créés par la méthode LUT. Avant le travail, la surface de la fibre de verre doit être soigneusement nettoyée, puis lavée et soigneusement séchée. Après la fabrication, les pistes conductrices doivent être vérifiées avec un multimètre pour un court-circuit.
Deuxième étape L'installation électronique des éléments
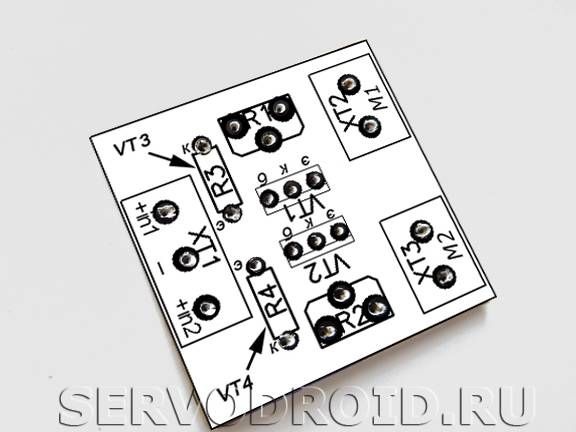
Ensuite, vous devez prendre un dessin imprimé sur papier et le coller sur le tableau créé. Dans ce cas, les trous sur le papier et dans le PCB doivent correspondre exactement. Ensuite, les composants radio sont installés comme indiqué sur le schéma. En cours de travail, l'installation des résistances R3, R4 nécessite d'installer des phototransistors VT3, VT4.
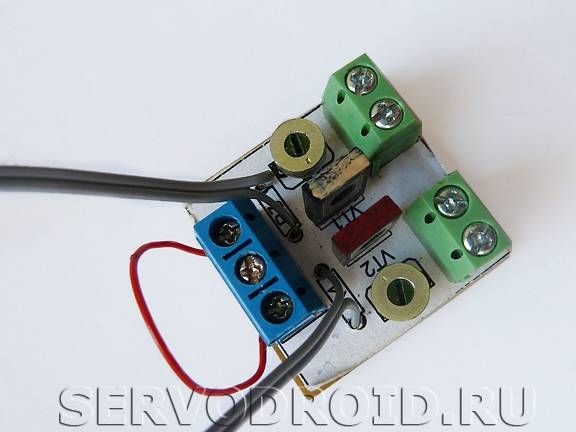
Les sections extrêmes du bornier à trois sections XT1 doivent être connectées avec un fil de montage. Les points de connexion des contacts doivent être bien isolés, il est préférable d'utiliser un tube thermorétractable à ces fins.
Troisième étape Comment créer un cas
Un dessin du corps doit être imprimé sur une feuille ordinaire de papier A4. Ensuite, vous devez prendre un morceau de carton ondulé et coller un dessin dessus, par la suite, le boîtier doit être coupé autour du périmètre.
Lorsque le pictogramme "ciseaux" se trouve le long des lignes en gras, des coupes doivent être effectuées. Par la suite, le long des lignes pointillées noires, vous devez plier le carton comme sur la photo et mettre les flèches noires.



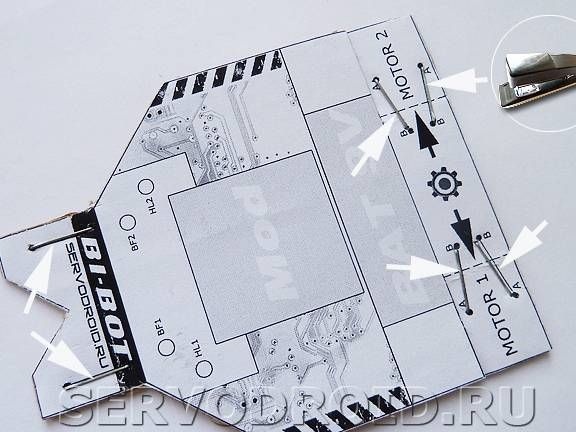


Avant et arrière du boîtier à la position spécifiée à l'aide d'une agrafeuse, vous devez installer les supports. Les lieux de leur installation sont marqués par des lignes noires avec des cercles. Des agrafes sont nécessaires pour rendre le cadre plus rigide. Après avoir installé les supports, ils sont fastidieux à plier le long des lignes de pliage.
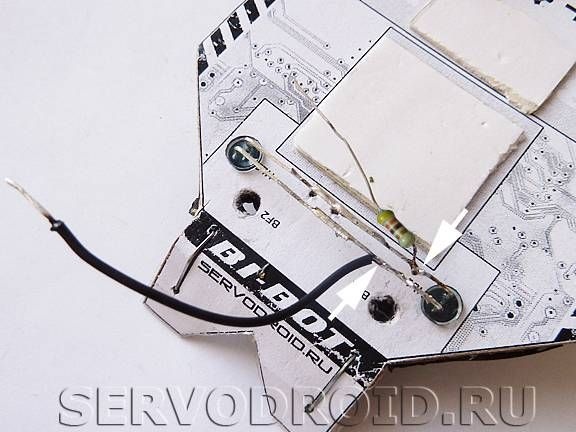
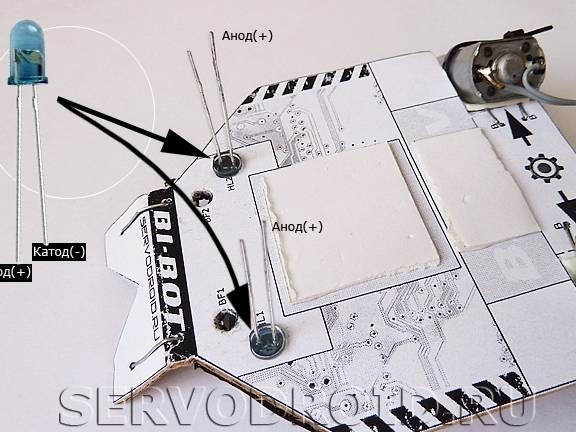
Aux endroits marqués BF1, BF2, vous devez faire des trous pour l'installation de phototransistors. Aux endroits HL1, HL2, vous devez faire des trous d'une taille telle qu'ils correspondent au diamètre du boîtier des LED infrarouges.
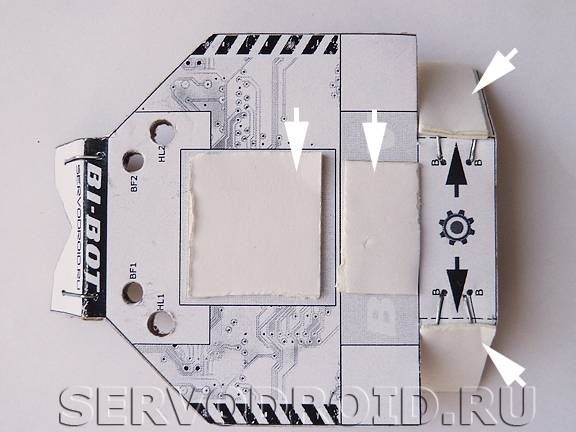
Aux endroits désignés comme Mod "," BAT 9V "et" MOTOR 1 "," MOTOR 2 ", collez des bandes de ruban adhésif double face.
Quatrième étape Installation de moteurs
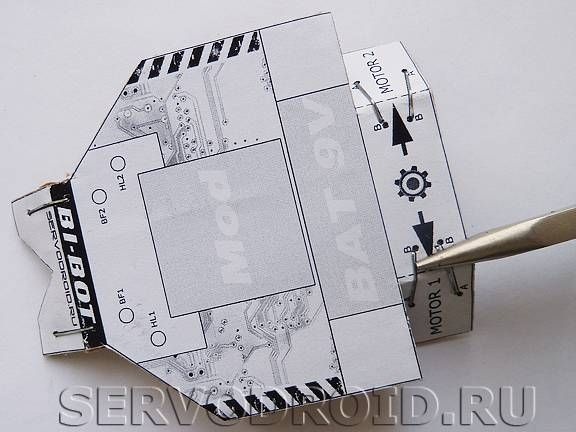
Les moteurs sont montés en position avec des attaches en nylon. Pour éviter que les arbres ne glissent, ils doivent être portés avec des protecteurs. Ils sont faits de bandes de caoutchouc, qui sont dans les tiges d'hélium des stylos. Au même stade, soudez les fils aux moteurs.


Cinquième étape Installation de LED infrarouges
Lors de l'installation de LED infrarouges, il est important de ne pas confondre leurs conclusions, pour les éléments importés un contact long est une anode, c'est-à-dire un plus. Les LED sont installées aux positions HL1, HL2 comme indiqué sur la photo. Les résultats sont pliés afin que les diodes puissent être connectées en parallèle.
Une résistance de 430 ohms doit être soudée au contact positif des LED et un fil noir au contact négatif.
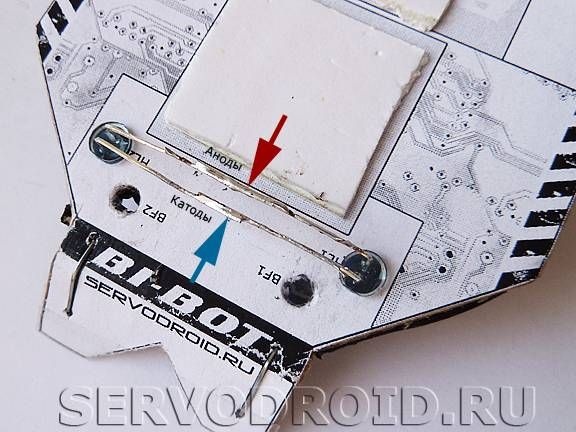
L'autre extrémité du fil noir doit être connectée à la broche centrale du bornier à trois sections. Quant à la sortie de la résistance, elle est connectée à la borne du bornier.
Étape six Phase de construction finale
Pour que le robot se déplace le long de la ligne, les phototransistors sont mis en place BF1, BF2 comme sur la photo.
Les transistors pour le mouvement derrière la source lumineuse sont placés à l'arrière.
En conclusion, les moteurs sont connectés et la batterie est mise.


C'est tout, le robot est prêt. Vous pouvez maintenant essayer de l'allumer et de le configurer selon les conditions souhaitées.