

Dans la vidéo, vous pouvez voir comment fonctionne le robot. Il change progressivement de couleur pendant le fonctionnement.

Matériaux et outils pour assembler le robot:
- Supports de montage en U;
- quatre piles LR44 1,5 V chacune;
- LED RGB multicolore avec fonction de commutation;
- tubes isolants;
- punaise en acier;
- moteur basse tension type RF-300CA;
- bouton pour allumer le robot (avec deux fils);
- fils pour connecter le moteur;
- LED d'alarme clignotante.
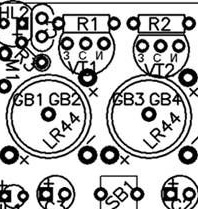

Concernant le nécessaire électronique éléments, ils sont représentés sur la figure. La carte de circuit imprimé est constituée d'une feuille de PCB, ses dimensions ne sont que de 30X30 mm. L'auteur recommande également l'utilisation de petits condensateurs polaires pour l'assemblage.
Processus de fabrication de robots
Première étape. Schéma de principe du robot
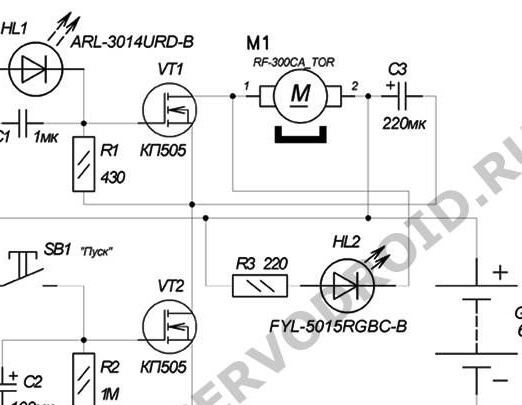
Le circuit du robot est visible sur la figure. Après avoir inséré la batterie, le robot est à l'état éteint, pour l'allumer, appuyez sur le bouton SB1. Immédiatement après cela, le condensateur C2 est instantanément chargé. La plaque positive du condensateur est connectée à la grille du transistor à effet de champ VT2. A cet égard, lorsque le seuil de commutation est atteint, la résistance du canal drain-source de ce canal diminue instantanément et une charge potentielle négative se forme au niveau du drain. Eh bien, ce qui se passe ensuite peut être vu plus en détail dans le diagramme.
Deuxième étape Monter une LED RGB
La LED sous le numéro 1 est montée sur la carte de circuit imprimé. Dans le dessin, cette position est appelée HL2. Une fois la LED installée, ses conclusions doivent être pliées de sorte que la LED soit dirigée sur le côté. Ainsi, pendant le fonctionnement, la LED ne brillera pas vers le haut, mais sur le côté, éclairant les murs. Dans quelle direction la lumière brillera est indiquée par une flèche noire.

Troisième étape Monter les supports de montage de la batterie
Pour assurer le contact entre la batterie et le robot, des punaises sont utilisées.Un bouton est installé au centre, dans le diagramme, il est marqué comme GB1, GB2, et le second est réglé sur la position GB3, GB4. Pour fixer solidement les contacts, les boutons sont soudés avec une grande quantité de soudure.


Les piles sont installées sur le bouton métallique sous le numéro 3. Les piles sont fixées avec une attache en U, sur laquelle sont portés des isolateurs de tubes. La partie supérieure du support doit être légèrement pliée avec un arc vers le bas, cela permettra aux batteries d'être pressées contre le contact inférieur. Des tubes isolants sont nécessaires pour que les faces verticales des batteries n'entrent pas en contact avec les horizontales.
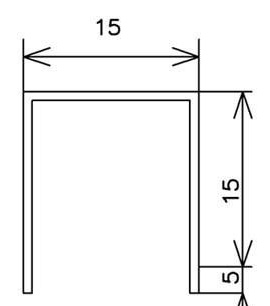
Pour fabriquer une attache en U, vous devez utiliser deux trombones. Ils doivent être pliés en forme de U, comme indiqué sur le dessin. Tous les tubes peuvent être utilisés, le chlorure de polyvinyle est utilisé ici. Leur hauteur doit être égale à la hauteur des batteries.
Installez le support par soudure, pour cela, vous devez étamer ses extrémités. Pour l'étamage, il est nécessaire d'utiliser un flux neutre non lavant.
Quatrième étape Installer le moteur
Le moteur est installé sur le côté de la planche où passent les rails, il est situé avec l'arbre vers le bas. Pour fixer le moteur, vous pouvez utiliser de la colle chaude ou du ruban adhésif double face. Mais avant de monter fermement le moteur, vous devez le connecter et vérifier le fonctionnement complet du système.

Cinquième étape Configuration et test fait maison
Après avoir assemblé le robot, vous pouvez tester et configurer. Pour ce faire, vous devez installer des batteries dans le robot, elles sont installées à la place de GB1, GB2 et GB3, GB4. Dans ce cas, l'électronique doit être éteinte. Après avoir installé les piles, le robot peut être allumé, cela se fait en utilisant le bouton SB1. Après avoir appuyé dessus, le moteur devrait commencer à fonctionner, la LED HL1 clignotera et la LED RGB s'allumera également.
Après un certain temps, le robot s'éteindra automatiquement, il s'arrêtera et toutes les diodes s'éteindront. Il est ensuite allumé de la même manière que pour la première fois, en appuyant sur un bouton.

Pour ajuster le temps du robot, vous devez expérimenter avec les valeurs de la résistance R2 et du condensateur C2, ils sont responsables de cette fonction. Si vous devez définir le fonctionnement maximal du robot, la capacité du condensateur doit être aussi grande que possible. D'une manière si simple, vous pouvez assembler un robot aussi intéressant.